數(shù)控位置伺服系統(tǒng)控制策略研究
2012-07-25 04:04:42張禮兵游有鵬
中國機(jī)械工程 2012年14期
張禮兵 游有鵬 吳 婷
1.南京航空航天大學(xué),南京,210016 2.嘉興學(xué)院,嘉興,314001
0 引言
數(shù)控系統(tǒng)朝向高速高精度發(fā)展,是數(shù)控機(jī)床適應(yīng)現(xiàn)代先進(jìn)制造技術(shù)發(fā)展的必然趨勢。高速高精度加工技術(shù)對數(shù)控機(jī)床的數(shù)控系統(tǒng)和伺服控制的性能提出了更高的要求。高性能的數(shù)控系統(tǒng)和高精度的位置控制策略是提高數(shù)控機(jī)床加工精度和加工效率的關(guān)鍵要素。高精度的位置伺服控制系統(tǒng)既要有良好的動態(tài)響應(yīng)能力和靜態(tài)穩(wěn)定性,又要有很強(qiáng)的抗干擾能力,即魯棒性[1]。傳統(tǒng)位置伺服控制通常采用PID控制方法[2],但是在數(shù)控機(jī)床高速加工過程中,位置伺服控制系統(tǒng)是一個多變量、非線性、強(qiáng)耦合的控制對象,基于經(jīng)典控制理論的控制方法,在參數(shù)匹配良好的情況下可以獲得較好的性能,一旦系統(tǒng)參數(shù)發(fā)生變化或者受到內(nèi)在或外界的干擾,將導(dǎo)致控制性能下降[3]。因此,單純的PID控制方法,不適合應(yīng)用于高速高精度數(shù)控機(jī)床的位置伺服控制系統(tǒng)。為了提高位置伺服控制的性能,文獻(xiàn)[4]使用了一種神經(jīng)網(wǎng)絡(luò)IP位置控制器,有效地改進(jìn)了IP控制器的抗干擾性,取得了較好的控制效果;文獻(xiàn)[5]結(jié)合神經(jīng)元的自學(xué)習(xí)能力,設(shè)計了一種神經(jīng)元離散滑模結(jié)構(gòu)的位置伺服控制算法,削弱了常規(guī)滑模結(jié)構(gòu)控制中的抖振現(xiàn)象,使得系統(tǒng)性能得到了提高;文獻(xiàn)[6]提出一種神經(jīng)網(wǎng)絡(luò)與變結(jié)構(gòu)相融合的控制策略并用于非線性機(jī)器人控制,提高了系統(tǒng)的魯棒性。雖然這些方法對系統(tǒng)的性能有了一定的改善,但是這些方法存在控制復(fù)雜、計算量大和實(shí)時性較差等缺點(diǎn),因此不能很好地滿足高速高精度數(shù)控機(jī)床位置伺服控制的實(shí)時性要求。
近年來,許多研究人員致力于預(yù)測控制和模糊邏輯控制的研究,它們已成為智能控制領(lǐng)域的研究熱點(diǎn)之一。文獻(xiàn)[7]提出了一種多電機(jī)多模型動態(tài)矩陣預(yù)測控制算法,對多電機(jī)的同步控制效果較好。文獻(xiàn)[8]采用階躍響應(yīng)法建立控制對象的數(shù)學(xué)模型,將預(yù)測控制的思想用于位置跟蹤系統(tǒng)的控制,所設(shè)計的控制器具有較好的跟蹤性能和魯棒性能。文獻(xiàn)[9]針對永磁同步電機(jī)交流伺服系統(tǒng),采用模糊控制方法進(jìn)行控制,與常規(guī)PID控制的交流伺服系統(tǒng)相比,具有良好的動態(tài)響應(yīng)能力、穩(wěn)態(tài)性能以及較強(qiáng)的魯棒性。文獻(xiàn)[10]針對永磁直線同步電機(jī)伺服系統(tǒng)參數(shù)不確定性設(shè)計了一種自構(gòu)式反饋模糊神經(jīng)網(wǎng)絡(luò)控制器,結(jié)果表明控制系統(tǒng)具有較強(qiáng)的魯棒性。因此,預(yù)測控制和模糊邏輯控制具有良好的控制性能。
本文采用模糊推理和預(yù)測控制相結(jié)合的控制策略,提出一種基于模糊推理的廣義預(yù)測控制方法對數(shù)控位置伺服控制系統(tǒng)進(jìn)行控制。采用廣義預(yù)測控制方法對數(shù)控位置伺服控制系統(tǒng)設(shè)計位置廣義預(yù)測控制器,根據(jù)實(shí)際反饋偏差及其變化率,采用模糊邏輯推理方法進(jìn)行自適應(yīng)的調(diào)整控制量,從而有效地提高了位置伺服控制系統(tǒng)的動態(tài)響應(yīng)能力、穩(wěn)態(tài)性能和魯棒性。
1 數(shù)控位置伺服控制模型
數(shù)控位置伺服控制系統(tǒng)由位置環(huán)、速度環(huán)和電流環(huán)等組成,其結(jié)構(gòu)如圖1所示。由于控制對象的結(jié)構(gòu)、參數(shù)和環(huán)境具有不確定性,往往很難從機(jī)理上獲得系統(tǒng)的精確的數(shù)學(xué)模型。為了建立特定應(yīng)用場合的被控對象的數(shù)學(xué)模型,需要根據(jù)系統(tǒng)的輸入和輸出數(shù)據(jù)對控制系統(tǒng)的結(jié)構(gòu)、參數(shù)和模型進(jìn)行辨識,從而獲得位置伺服控制系統(tǒng)的模型,模型表達(dá)式為

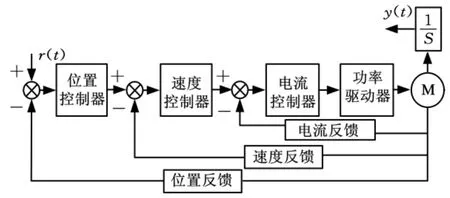
圖1 數(shù)控位置伺服控制系統(tǒng)框圖
式中,u和y分別為系統(tǒng)的輸入和輸出;n和m分別為系統(tǒng)階次和輸入階次。
將式(1)進(jìn)行時間序列離散化處理,可以得到系統(tǒng)的差分方程形式的表達(dá)式:

根據(jù)文獻(xiàn)[11]和[12]中的利用輸入和輸出數(shù)據(jù)進(jìn)行系統(tǒng)模型辨識的思想,本文采用網(wǎng)格搜索算法和遞推最小二乘法相結(jié)合的思想對控制系統(tǒng)的模型結(jié)構(gòu)和模型參數(shù)進(jìn)行辨識,從而可以獲取數(shù)控位置伺服控制系統(tǒng)的數(shù)學(xué)模型。
1.1 模型結(jié)構(gòu)辨識
模型結(jié)構(gòu)辨識主要是確定系統(tǒng)的系統(tǒng)階次n和輸入階次m。采用網(wǎng)格搜索算法對控制系統(tǒng)的模型結(jié)構(gòu)辨識就是將系統(tǒng)階次n和輸入階次m分別取N個值和M個值,對N×M個(n,m)的組合利用遞推最小二乘法的方法進(jìn)行尋優(yōu)求解,使目標(biāo)函數(shù)值最小。以施耐德400W十字平臺中的一個軸作為被控對象進(jìn)行結(jié)構(gòu)辨識,以辨識建立的數(shù)學(xué)模型表達(dá)式和輸出數(shù)據(jù)的均方誤差mse為目標(biāo)函數(shù),其表達(dá)式以及系統(tǒng)滿足的條件如下:
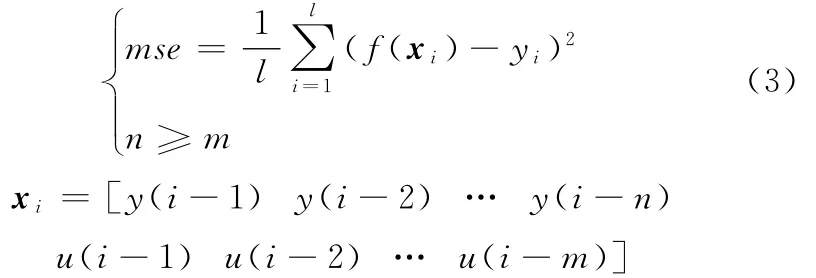
式中,f(xi)為辨識建立的數(shù)學(xué)模型;yi為采集的輸出數(shù)據(jù)。
在MATLAB軟件平臺下導(dǎo)入輸入和輸出數(shù)據(jù),并經(jīng)過模型結(jié)構(gòu)辨識算法得到的辨識結(jié)果為

1.2 模型參數(shù)辨識
經(jīng)過模型結(jié)構(gòu)辨識后,模型的表達(dá)式可以表示為

模型參數(shù)辨識就是確定式(5)中的未知量a1~a4和b1~b3的實(shí)際值。采用遞推最小二乘法進(jìn)行模型參數(shù)辨識,其基本思想為:新的估計值等于舊的估計值與修正值之和。遞推最小二乘法的遞推公式為[13]
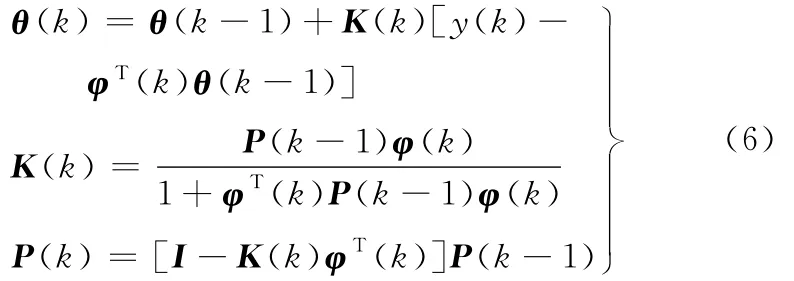
其中,φ(k)= [y(k-1)y(k-2)y(k-3)y(k-4)u(k-1)u(k-2)u(k-3)],θ(k)=[a1a2a3a4b1b2b3],當(dāng)k=0時,P(0)=106I,θ(0)=0,I為單位矩陣。
在MATLAB軟件平臺下導(dǎo)入輸入和輸出數(shù)據(jù),采用遞推最小二乘法算法得到模型參數(shù)辨識結(jié)果為

2 位置伺服控制策略
式(7)是一個理想模型,實(shí)際的位置伺服控制系統(tǒng)在運(yùn)行過程中,由于受到干擾等因素的影響,系統(tǒng)具有不確定性,因此該模型不能很好地反映數(shù)控位置伺服控制系統(tǒng)的實(shí)際模型。實(shí)際的模型可以采用CARIMA模型來描述:
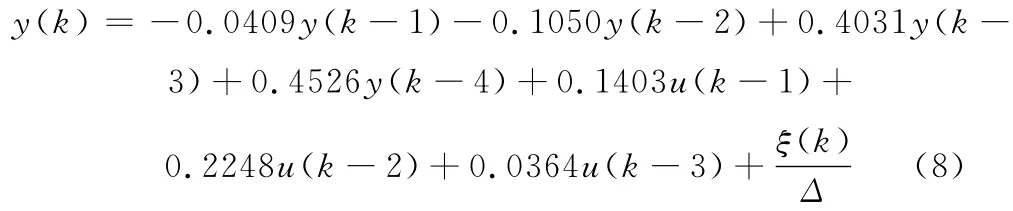
式中,ξ(k)為系統(tǒng)的白噪聲;Δ為差分算子,Δ=1-z-1。
2.1 模糊推理廣義預(yù)測控制
式(8)實(shí)際上是一個線性模型,但位置伺服控制系統(tǒng)一般為復(fù)雜的非線性動態(tài)系統(tǒng),采用線性模型作為預(yù)測模型,必然存在模型誤差,當(dāng)采用傳統(tǒng)的廣義預(yù)測控制策略時,如果模型嚴(yán)重失配可能破壞系統(tǒng)的穩(wěn)定性。因此,在進(jìn)行數(shù)控位置伺服控制時,為了有效地改善控制器的抗干擾能力和提高控制效果,采用基于模糊邏輯推理的廣義預(yù)測控制策略,其中式(8)作為廣義預(yù)測控制的預(yù)測模型,通過滾動優(yōu)化計算系統(tǒng)的最優(yōu)控制率,控制預(yù)測模型的輸出;對模型失配或者其他干擾因素引起的輸出偏差通過模糊邏輯推理在線反饋校正,進(jìn)行非線性誤差補(bǔ)償,從而克服了傳統(tǒng)的廣義預(yù)測控制方法的缺點(diǎn)。其控制結(jié)構(gòu)框如圖2所示。
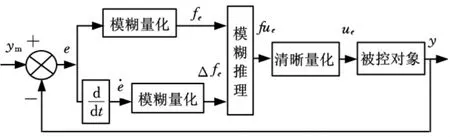
圖2 模糊推理廣義預(yù)測控制原理框圖
2.2 廣義預(yù)測控制
將式(8)進(jìn)行變形,得到一般形式的表達(dá)式:
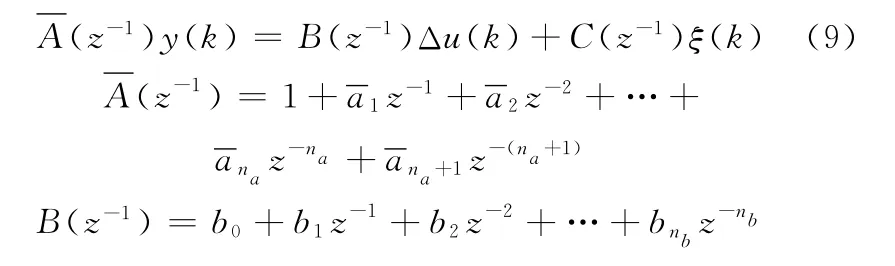

根據(jù)預(yù)測理論,為了預(yù)測前j步輸出,引入Diophantine方程:

當(dāng)C(z-1)=1時,對式(9)和式(10)聯(lián)立求解,可以求出前j步模型預(yù)測輸出:
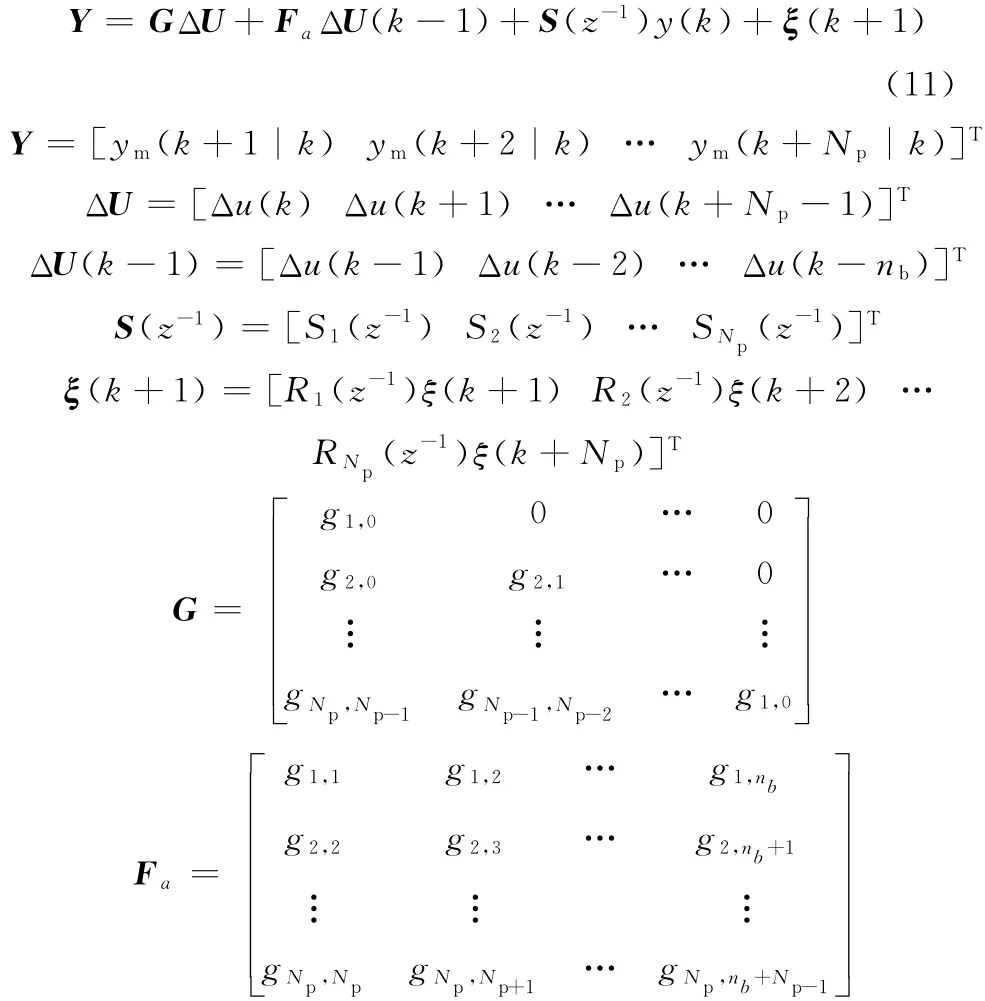
式中,Y、ΔU、ΔU(R-1)分別為未來的預(yù)測輸出、當(dāng)前和未來的控制增量、過去的控制增量。
采用對輸出誤差和控制增量加權(quán)的二次型性能指標(biāo)作為控制條件,其性能指標(biāo)可以表示為
式中,n′為預(yù)測時域;m′為控制時域。
根據(jù)式(11)和式(12)可以計算出j步模型預(yù)測性能最佳的控制增量。

2.3 反饋誤差的模糊推理
由于實(shí)際系統(tǒng)多為復(fù)雜的非線性系統(tǒng),采用CARIMA模型進(jìn)行建模存在建模誤差,或者系統(tǒng)受到其他干擾等不確定性因素的影響,系統(tǒng)必然存在輸出偏差。設(shè)k時刻數(shù)控位置實(shí)際輸出為

式中,ym(k)為k時刻的預(yù)測模型輸出;e(k)為k時刻位置伺服系統(tǒng)實(shí)際位置與預(yù)測模型輸出位置的偏差。
假定在輸入控制量u(k)的作用下,k+1時刻通過周期采樣得到實(shí)際輸出位置為y(k+1),模型預(yù)測輸出位置為ym(k+1),定義實(shí)際位置輸出與預(yù)測輸出偏差和偏差變化率分別為

采用二維模糊控制對位置反饋偏差進(jìn)行實(shí)時在線校正,模糊控制器以偏差fe和偏差變化率Δfe為輸入變量,以偏差的控制量fue為輸出量。模糊量的隸屬函數(shù)采用等腰三角形。模糊控制規(guī)則可以表示為
iffe是AiandΔfe是Bi,則fue是Ci
其 中,Ai,Bi,Ci∈ {NB,NM,NS,ZE,PS,PM,PB}={負(fù)大,負(fù)中,負(fù)小,零,正小,正中,正大},i=1,2,…,49。
清晰化計算采用加權(quán)平均法,表達(dá)式如下:
在線反饋校正的模糊邏輯推理過程如圖3所示。
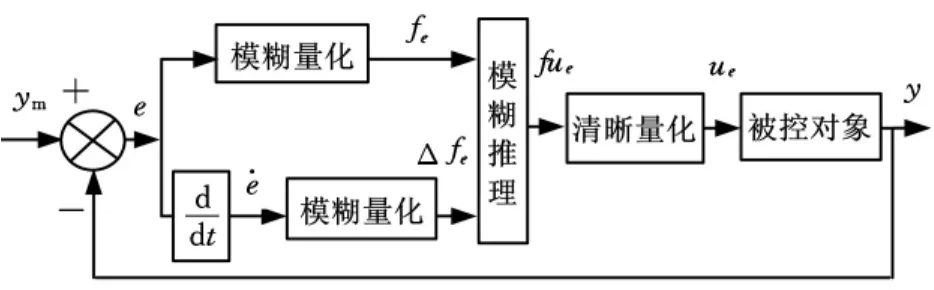
圖3 反饋校正的模糊推控制圖
3 仿真與實(shí)驗(yàn)驗(yàn)證
3.1 仿真驗(yàn)證
為了驗(yàn)證基于模糊推理的廣義預(yù)測控制的控制效果,在MATLAB軟件環(huán)境下對該方法通過算法編程進(jìn)行仿真模擬驗(yàn)證。
數(shù)控位置伺服控制系統(tǒng)的數(shù)學(xué)模型如式(8)所示,設(shè)仿真所采用到的控制參數(shù),即預(yù)測時域n′=3,控制時域m′=2,控制加權(quán)系數(shù)Γ=diag(0.01,0.01,…,0.01),輸出柔化系數(shù)α=0.01,預(yù)測模型的白噪聲ξ(k)取值范圍為[-0.3,+0.3]mm。期望輸出指令cmd=100mm,在白噪聲的干擾下其仿真結(jié)果如圖4所示。
3.2 實(shí)驗(yàn)驗(yàn)證
為了進(jìn)一步驗(yàn)證本文所提出的控制算法的有效性,在施耐德400W十字平臺上進(jìn)行了基于模糊推理廣義預(yù)測控制方法和傳統(tǒng)的PID控制方法的對比實(shí)驗(yàn),實(shí)驗(yàn)條件如表1所示。
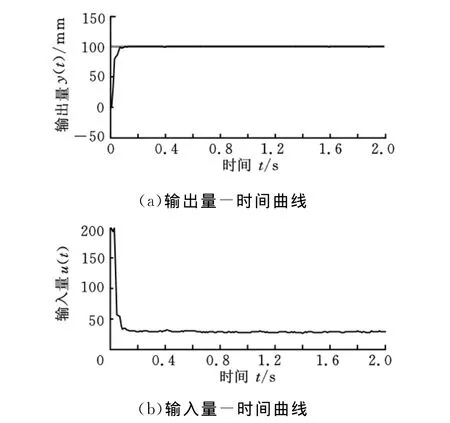
圖4 基于模糊推理的廣義預(yù)測控制輸入和輸出信號圖
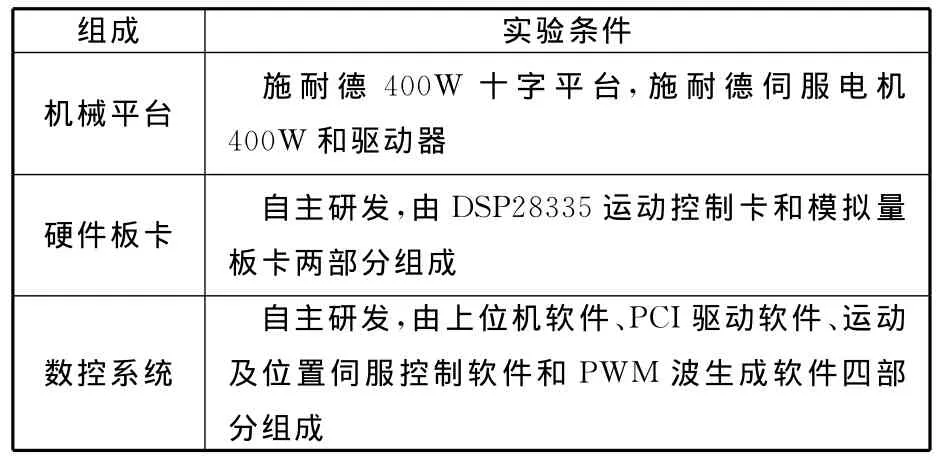
表1 實(shí)驗(yàn)條件表
以十字平臺中的其中的一個軸為被控對象,采樣周期Ts=2ms,控制時間長度t=2000ms,分別采用模糊推理的廣義預(yù)測控制方法和傳統(tǒng)的PID控制方法進(jìn)行實(shí)驗(yàn)。設(shè)期望輸出指令cmd=100mm,通過調(diào)試,廣義預(yù)測控制算法中,預(yù)測時域n′=3,控制時域m′=2,控制加權(quán)系數(shù)Γ=diag(0.8,0.8,…,0.8),輸出柔化系數(shù)α=0.78,輸出的階躍結(jié)果如圖5a所示。通過調(diào)試,設(shè)置PID控制參數(shù)為kp=0.013,ki=0,kd=0.02,其輸出的階躍結(jié)果如圖5b所示。在PID控制調(diào)試過程中,當(dāng)參數(shù)取值增大時,發(fā)生超調(diào)嚴(yán)重。
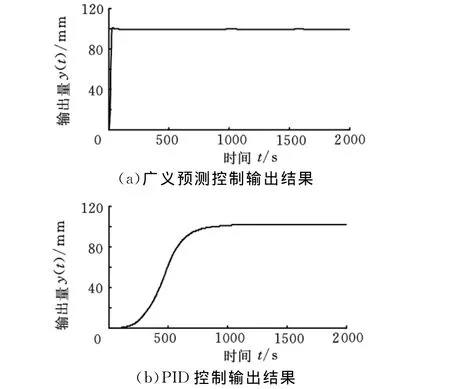
圖5 cmd=100mm時兩種控制方法的輸出結(jié)果圖
設(shè) 輸 入 為 ( 0,30 000 ),(30 000,48 000),(48 000,60 000)(單 位:脈 沖數(shù))三段直線指令,輸出結(jié)果如圖6所示,其中虛線為輸入指令,實(shí)線為輸出數(shù)據(jù)。
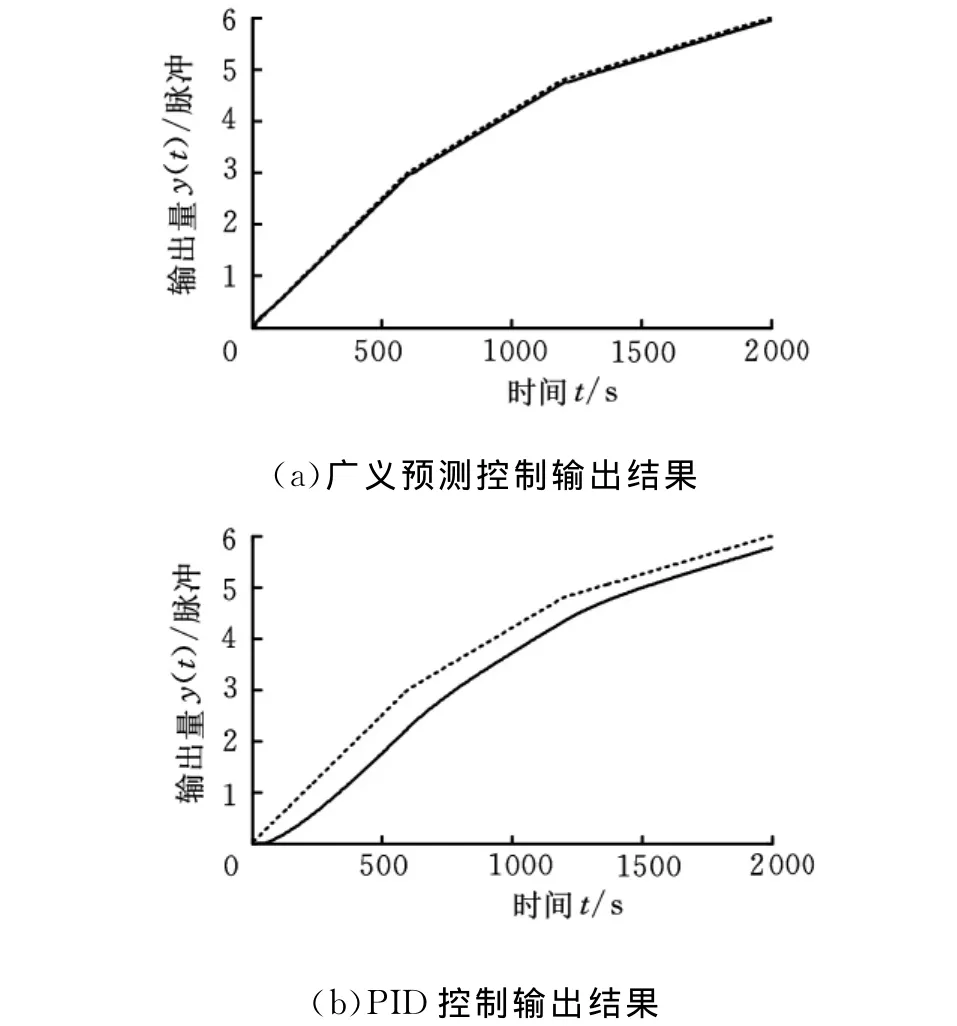
圖6 三條線段的兩種控制方法的輸出結(jié)果圖
通過分析仿真實(shí)驗(yàn),期望輸出指令為cmd=100mm時,當(dāng)系統(tǒng)達(dá)到穩(wěn)定狀態(tài)后,從圖4中可以看出,在[-0.3,0.3]mm范圍的白噪聲的干擾下,輸入信號在平衡位置附近微小波動,調(diào)整輸入信號量,使輸出結(jié)果基本上穩(wěn)定在100mm附近。因此,基于模糊推理的廣義預(yù)測控制方法具有較強(qiáng)的穩(wěn)態(tài)性能和魯棒性。
通過十字平臺的期望輸出指令cmd=100mm的階躍實(shí)驗(yàn),通過圖5可以得出,廣義預(yù)測控制的上升時間比PID控制的上升時間小了很多,響應(yīng)速度特別快。因此,廣義預(yù)測控制具有更好的動態(tài)性能。通過三段直線的控制實(shí)驗(yàn),根據(jù)實(shí)驗(yàn)結(jié)果(圖6),廣義預(yù)測控制的跟蹤誤差比PID控制的跟蹤誤差更小,跟蹤性能更好。因此,基于模糊推理的廣義預(yù)測控制方法用于數(shù)控位置伺服控制系統(tǒng)中,能夠提高系統(tǒng)的動態(tài)性能和跟蹤性能。
4 結(jié)語
在深入分析高速高精度加工技術(shù)對數(shù)控位置伺服控制提出的更高要求的基礎(chǔ)上,提出了一種基于模糊邏輯推理的廣義預(yù)測控制方法,詳細(xì)地闡述了該方法實(shí)現(xiàn)原理和控制過程。通過MATLAB仿真和施耐德十字平臺實(shí)驗(yàn),與傳統(tǒng)的PID控制方法的對比分析與應(yīng)用實(shí)驗(yàn)表明,該方法具有很好的動態(tài)性能、穩(wěn)態(tài)性能和魯棒性,更適合應(yīng)用于高速高精度數(shù)控系統(tǒng)的位置伺服控制系統(tǒng)。
[1]陳幼平,張代林,艾武,等.基于DSP的直線電機(jī)位置伺服控制策略研究[J].電機(jī)與控制學(xué)報,2006,10(1):61-65.
[2]Comins P,Munro N.PID Control:Recent Tuning Methods and Design to Specification[J].IEEE Proceeding:Control Theory Application,2002,149(1):46-53.
[3]許強(qiáng),賈正春,熊有倫.交流伺服系統(tǒng)最優(yōu)位置控制[J].微電機(jī),2000,33(2):18-20.
[4]王軍,肖建.永磁同步電動機(jī)自適應(yīng)神經(jīng)網(wǎng)絡(luò)IP位置控制器[J].電機(jī)與控制學(xué)報,2005,9(6):525-528.
[5]史曉娟.一種基于神經(jīng)元離散滑模變結(jié)構(gòu)的位置控制方法[J].儀器儀表學(xué)報,2008,29(7):1559-1562.
[6]張文輝,齊乃明,尹洪亮.自適應(yīng)神經(jīng)變結(jié)構(gòu)的機(jī)器人軌跡跟蹤控制[J].控制與決策,2011,26(4):597-600.
[7]張今朝,劉國海,潘天紅.多電機(jī)變頻調(diào)速同步系統(tǒng)的多模型預(yù)測控制[J].控制與決策,2009,24(10):1489-1494.
[8]蘇義鑫,周祖德,陳幼平,等.位置跟蹤系統(tǒng)的預(yù)測控制研究[J].中國機(jī)械工程,2001,12(12):1356-1359.
[9]葛鎖良,劉文慰.基于模糊控制的交流伺服系統(tǒng)的設(shè)計[J].東南大學(xué)學(xué)報,2003,33(9):154-157.
[10]王麗梅,武志濤,左濤.永磁直線電機(jī)自構(gòu)式模糊神經(jīng)網(wǎng)絡(luò)控制器設(shè)計[J].電機(jī)與控制學(xué)報,2009,13(5):643-647.
[11]Erkorkmaz K,Wong W.Rapid Identification Technique for Virtual CNC Drives[J].International Journal of Machine Tools & Manufacture,2007,47:1381-1392.
[12]Wong W,Erkorkmaz K.Constrained Identification of Virtual CNC Drives using a Genetic Algorithm[J].International Journal Advanced Manufacturing Technology,2010,50:275-288.
[13]李國勇.智能預(yù)測控制及其MATLAB實(shí)現(xiàn)[M].北京:電子工業(yè)出版社,2009.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34