仿生射流表面減阻特性實驗研究
2012-07-31 08:03:34趙剛谷云慶許國玉夏冬來趙華琳姚建均
中南大學學報(自然科學版) 2012年8期
趙剛,谷云慶,許國玉,夏冬來,趙華琳,姚建均
(哈爾濱工程大學 機電工程學院,黑龍江 哈爾濱,150001)
從20世紀70年代開始,降低阻力節約能源一直是國內外學者致力研究的重點問題。減阻技術不僅具有非常重要的軍事價值,而且在交通運輸、油氣輸送、體育等諸多領域都有廣闊的應用前景[1]。在動力和能源一定的條件下,根據理論推算,假設將船舶表面阻力減小 10%,其航行速度和航程可以同時增加約3.57%,即使只能獲得較小的減阻效果,每年也可以節約大量的能源,這對于緩解當前國內外能源危機極為重要[2-3]。生物經過億萬年不斷的自適應、自學習、自重構、自繁殖而不斷進化,它不僅包含機體對外界介質的即時調控,同時還包含自身經過長期進化形成的已相當穩固的對外屆環境的適應性,進而形成適合其自身生存的表面外形結構[4]。在現有的減阻技術中,仿生減阻技術通過模擬生物在進化過程中獲得的某些減阻特征,得到了很好的減阻效果,具有重要的工程實用價值。如采用與鯊魚鱗片具有相似結構的溝槽表面減阻[5-9],使用與海豚表皮相似彈性特征的柔性表面減阻[10-13],利用仿照昆蟲表面設計的非光滑表面減阻[14]等都是仿生減阻研究的重要成果。魚類的鰓位于咽的兩側,直接或間接與外界相通,在胚胎的早期,外胚層也向內凹陷,內外兩胚層相遇后打穿,形成鰓裂。鰓裂的數目隨動物種類不同而不同,圓孔類數目多為7對鰓裂。鯊魚終日生活在海水中,是具有快速運動能力的水生動物,在其捕食時的行進速度非常快,深海鯊魚的爆發啟動速度驚人,可達10~20 m/s。觀察發現,其身側前部排列著寬大的鰓板,每側有5~7個鰓裂,在游動時海水通過半開的口吸入,從鰓裂流出進行氣體交換,其功能除與呼吸密切相關外,還與降低自身運動阻力有關。在前期工作中,針對射流方向影響仿生射流表面減阻效果進行深入研究,得到較好減阻效果[15]。基于仿生研究的基本原理,通過對魚類鰓裂部位的形態特征進行結構簡化,建立類似魚類鰓裂部射流特征的仿生射流表面,在實驗模型表面加工出仿生射流孔結構,通過小型射流減阻測試實驗平臺研究仿生射流表面的減阻特性。
1 實驗設備及實驗模型
1.1 實驗設備
仿生射流表面減阻特性實驗在哈爾濱工程大學仿生減阻研究實驗室完成。自行設計并制造一個評估射流減阻效果的小型射流減阻測試實驗平臺。該小型射流減阻測試實驗平臺腔體為1個充滿水的封閉的循環管路,通過調速電機驅動扭矩信號耦合器帶動旋轉軸及負載旋轉運動,并在密封倉內形成一個壓力穩定的均勻流場。射流供水采用水泵供給方式,通過水泵將水槽中水泵入射流存水區,并以一定速度向密封倉內進行射流。小型射流減阻測試實驗平臺主要設備包括:(1)YVP系列變頻調速三相異步電動機。電機功率為1.5 kW,通過型號為E1000系列變頻器進行轉速調控;(2)扭矩信號耦合器。扭矩信號耦合器兩端軸頸通過聯軸器分別與電機和旋轉軸相聯接,測試實驗過程中流體對實驗模型表面的摩擦扭矩;(3)數據采集系統。自行設計開發的數據采集系統,在 LabVIEW 環境下編寫圖形用戶界面,實現對數據流程的軟件控制,采集實驗過程中不同實驗模型下流體對其表面的摩擦扭矩值,達到對數據采集的自動化及數據監控的實時化;(4)水泵。射流供給動力裝置。(5)聯想計算機。
減阻測試實驗平臺結構圖如圖1所示。其中,密封倉為1個圓形倉體,內腔壓力為常壓狀態,直徑×高度為 180 mm×125 mm,距小端面一側距離為 70 mm處正中頂端處和底端處分別開有直徑為6 mm的通孔,便于向密封倉內注入流體及作為射流出水管孔。實驗模型旋轉速度范圍為0~5 000 r/min,連續可調;扭矩信號耦合器量程范圍為 0~10 N/m,率響應為100 μs。
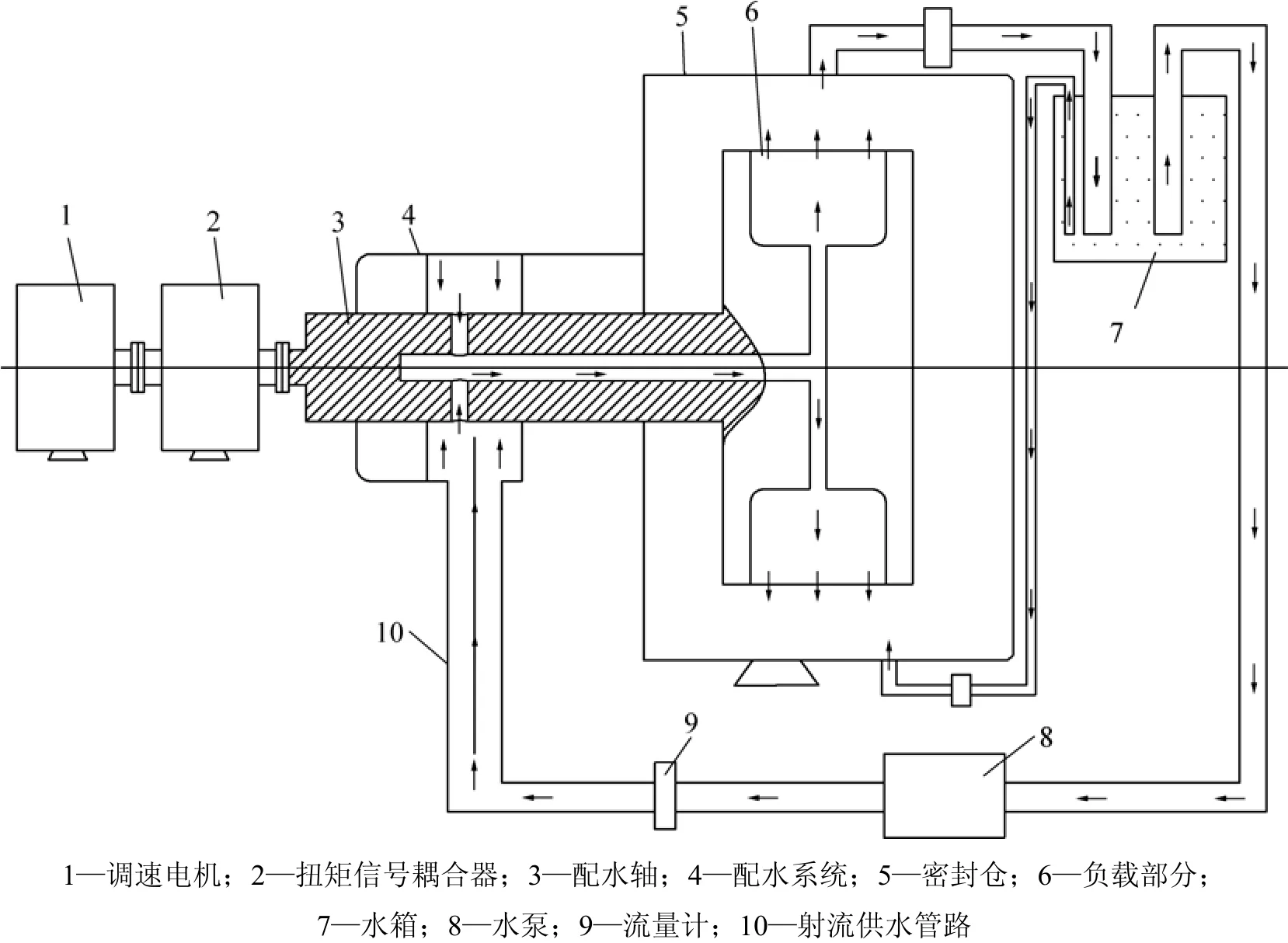
圖1 小型射流減阻測試實驗平臺結構圖Fig.1 Schematic of small jet drag reduction testing platform
實驗平臺電機通過聯軸器帶動扭矩信號耦合器運行,扭矩信號耦合器通過聯軸器帶動負載運行;負載主要包括射流供水部分和實驗模型部分。本實驗為對照實驗,其中實驗模型為可更換構件,實驗過程中,通過扭矩信號耦合器顯示出不同射流表面實驗模型與對照的光滑表面模型在相同轉速、相同實驗環境下所受到流體摩擦扭矩,通過摩擦扭矩來量化減阻效果。電機通過變頻器進行轉速調節,扭矩信號耦合器將信號依次通過變送器、采集卡至計算機中,通過LabVIEW軟件對數據進行讀取并存儲。在軟件界面中可以讀取系統中扭矩瞬時值和扭矩隨時間變化曲線圖及扭矩信號耦合器輸出端轉速變化瞬時值和轉速隨時間變化曲線圖。
1.2 實驗模型
考慮到密封倉尺寸、實驗模型自身質量及形狀對系統影響、材料成本、模型加工及產品質量,最終選擇U-PVC管作為實驗模型載體。分別截取直徑×高度為160 mm×50 mm、壁厚為5 mm的幾段圓形管路。實驗模型的形位公差為7級精度,表面粗糙度為0.8。射流孔結構加工在實驗模型表面上,加工成通孔,沿周向及軸向按照一定規律分布。實驗模型表面射流孔加工方法如下:設計專用夾具(夾具由鉆模、螺栓及專用壓板等組成,實驗模型通過螺栓專用壓板固定在可傾式工作臺上,鉆模通過螺紋固定在模型上),通過與可傾式工作臺配合使用,高質量地加工出射流孔;定位方式可依據不同實驗模型的實際結構以及精度需要而定。射流孔具體排布方式為:在實驗模型周向平均分布10個射流孔(a=36°),軸向分布 5排射流孔,每排10個,共計50個射流孔。其中軸向第1排孔、第3排孔和第5排孔相對應的每3個射流孔在同一母線上;第2排孔、第4排孔相對應的每2個射流孔在同一母線上,二者母線與實驗模型圓心所成面的二面角θ=18°。第3排孔位于實驗模型中間部位,與第1排孔和第5排孔之間距離均為20 mm,第2排孔與第4排孔距較近一側端面距離均為20 mm,實驗模型結構如圖2所示。射流孔徑D分別取1.2,2.0,3.0和4 mm 4組,共計5組實驗模型,其中包括一個表面不帶射流孔光滑實驗模型。為避免加工過程中U-PVC管因受力不均而產生變形,加工出與U-PVC管內孔相配套的圓形襯套,當在實驗模型表面加工射流口時,將圓形襯套安裝在 U-PVC管內腔中,達到提高管壁強度的功效。
射流實驗過程中,當一次實驗完成后,只需要更換實驗模型即可,而不需要進行其他部位拆卸,保證了不同實驗模型情況下實驗狀態的一致性,也避免了實驗過程中定位誤差及裝配誤差等,并且操作容易所需時間短。實驗平臺工作時振動小,噪聲低,水循環利用,起到環保、節約資源的功效。
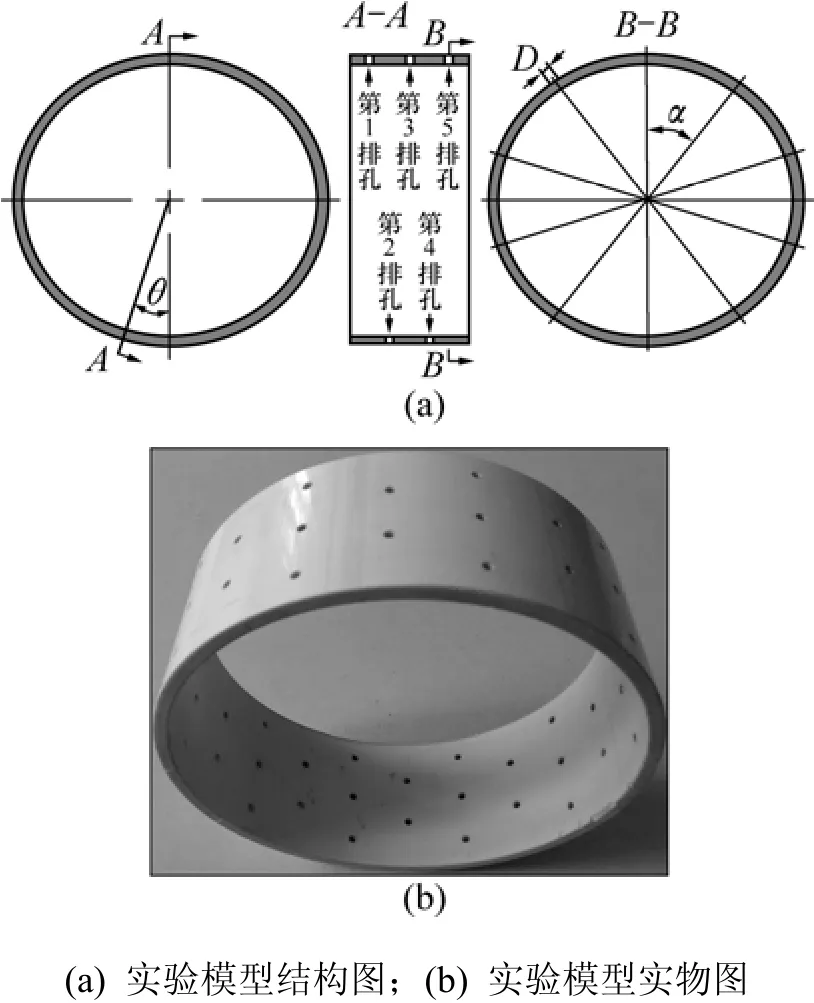
圖2 射流表面實驗模型結構示意圖Fig.2 Structure schematic drawing of experimental model and jet surface
2 測試實驗工作原理及評估方法
2.1 工作原理
在密封倉內沒有注入水之前,實驗平臺電機未啟動,實驗模型表面不受摩擦阻力;啟動電機,測得此情況下實驗平臺系統的摩擦扭矩,用于對數據采集系統采集數據進行修正,保證實驗過程中所采集的扭矩即為實驗模型所受到流體對其的摩擦扭矩。以上工作校驗好后,停止電機運行,通過密封倉底端管路向密封倉內注入水,當頂端管路有均勻水流流出時,表明水已經注滿腔體。射流供給采用水泵供給。啟動電機,通過變頻器調節電機轉速,繼而調控實驗模型旋轉轉速,實驗模型在水中旋轉過程中受到水對其表面的摩擦阻力,該摩擦阻力作用于扭矩信號耦合器表現為扭轉力矩,這個變形通過扭矩信號耦合器轉變為頻率信號,頻率信號經由數據采集系統,送至計算機中,通過基于 LabVIEW 環境下編寫圖形用戶界面,最終以扭矩的形式顯示出測量值及即時變化曲線。同時,扭矩信號耦合器通過碼盤采集自身輸出軸的轉速,將信號一并輸計算機中,在數據采集用戶界面顯示出轉速即時值及即時變化曲線。
為了避免測試系統誤差,提高流體阻力測試的準確性,實驗之前對測試系統進行零點標定。通過進行多次無信號輸入狀態測試采樣之后,對零點誤差進行剔除極值后取平均的方法進行統計分析,同時將處理后得到的誤差值存儲計算機中,在進行正式的實驗測試時,實驗值減去預先存儲在計算機中的每次測量的零點誤差后即為真實測量值,通過該方法可以有效消除測試值零點誤差。
2.2 評估方法
實驗中采集時間為0.05 s,為了得到穩定性較好的實驗數據,剔除前500次所采集的數據,從501次起,共取300次。分別計算不同實驗模型情況下的300組數據的平均值,對數據進行分析處理。
實驗過程中分別對光滑表面實驗模型和不同射流孔徑的實驗模型進行扭矩測試,旋轉速度r依次取2 500,2 600,2 700,2 800,2 900,3 000,3 100,3 200,3 300,3 400,3 500和 3 600 r/min,共12組旋轉速度。水溫為 20 ℃。通過光滑表面實驗模型與相同條件下開有不同射流孔徑的實驗模型的摩擦扭矩進行比對,來評估仿生射流表面的減阻效果,減阻率R計算公式為:

式中:Ms為光滑表面實驗模型所受摩擦扭矩,N·m;MJ為射流表面實驗模型所受摩擦扭矩,N·m。
旋轉過程中由于水的黏性作用而對實驗模型產生摩擦阻力,繼而產生摩擦扭矩,其中,摩擦阻力f為
式中,τ表示壁面剪應力,MPa;A表示壁面面積,m2;τi表示壁面離散單元剪應力,MPa;Ai表示壁面離散單元面積,m2。
由式(2)可得摩擦扭矩公式:

由于實驗模型與回轉中心間距離為定值,由式(3)可知,通過實驗模型表面所受摩擦扭矩來反應減阻率與采用實驗模型表面所受阻力來反應減阻率效果一致。
3 實驗結果與分析
在旋轉速度為2 500~3 600 r/min(間隔為100 r/min)下,依次對光滑表面、射流孔徑分別為1.2,2.0,3.0和4.0 mm實驗模型下,測試水對其表面的摩擦扭矩,并計算出各射流表面的減阻率,實驗結果如表1所示。
圖3所示為不同表面結構實驗模型的摩擦扭矩特性曲線,圖4所示為仿生射流表面實驗模型隨旋轉速度變化曲線。由表1和圖3可知,不同表面結構實驗模型隨旋轉速度增大,所受摩擦扭矩變化梯度越來越大,當旋轉速度增大至3 000 r/min時,光滑表面實驗模型所受的摩擦扭矩明顯大于射流表面實驗模型所受的摩擦扭矩,其中射流孔徑為3 mm的實驗模型所受摩擦扭矩最小。由表1和圖4可知,旋轉速度為3 000 r/min以下時,射流表面出現增阻力現象,隨著旋轉速度不斷增加,增阻現象逐漸減小;當旋轉速度達到3 000 r/min時,射流表面出現減阻效果,且隨著旋轉速度不斷增加,減阻率逐漸增大。從圖4可以看出:旋轉速度在3 000 r/min以上時,射流孔徑為3 mm表面結構減阻效果最好、射流孔徑為4 mm表面結構減阻率其次、射流孔徑1.2 mm表面結構減阻效果最差;旋轉速度在3 000 r/min以下時,射流孔徑為2 mm表面結構增阻效果變化梯度最大,增阻最為明顯;當旋轉速度為 3 500 r/min、射流孔徑為3 mm時,減阻率最大,為10.8%;當旋轉速度為2 500 m/min、射流孔徑為2 mm時,增阻效果最大,為11.7%。

表1 不同表面結構實驗模型在不同旋轉速度下的實驗結果Table 1 Variable rotational speed experiment result of experimental model with variable surface structure
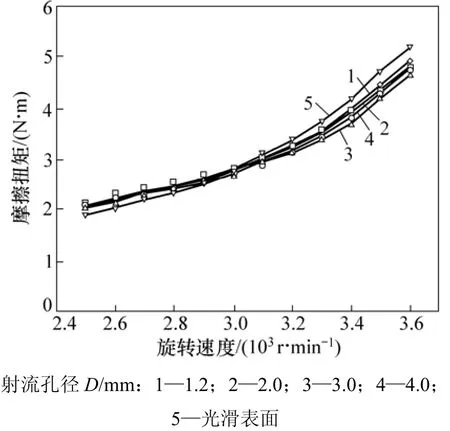
圖3 實驗模型摩擦扭矩隨旋轉速度變化特性曲線Fig.3 Friction torque characteristic curves of experimental model vs. rotational speed
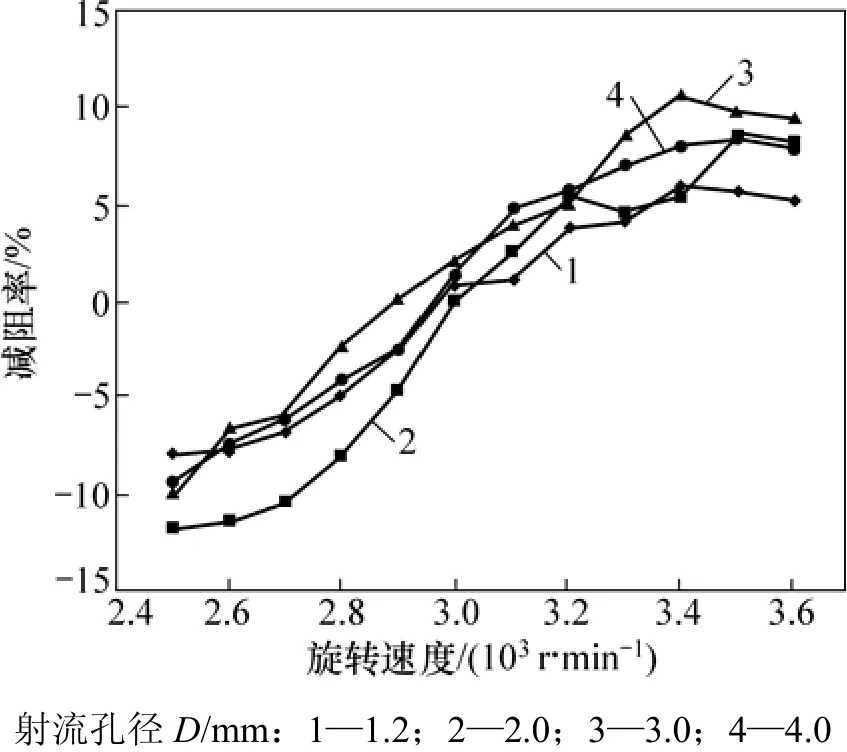
圖4 仿生射流表面減阻率隨旋轉速度變化曲線Fig.4 Drag reduction effect curves of bionic jet surface vs. rotational speed
結合前期對仿生射流表面減阻特性仿真分析結果及本次實驗結果可以認為:與模型表面無射流孔的光滑表面所受摩擦阻力相比,射流表面在一定條件下,可以明顯降低射流孔沿旋轉方向下游流域的摩擦阻力,這與射流過程中產生的漩渦有著密切關系。在射流過程中,射流孔下游近壁面處低速流場厚度增加,即邊界層黏性底層增厚,相應速度梯度降低,使得壁面所受剪應力降低,摩擦阻力減小。當實驗模型旋轉速度增大時,射流速度增大,射流孔下游近壁面處出現漩渦,此時漩渦速度較低,相當于邊界層黏性底層繼續增厚,壁面所受剪應力降低,表現減阻狀態;隨著旋轉速度逐漸增大,漩渦尺寸和速度逐漸增大,致使射流孔壁面附近產生反向流,反向流與漩渦同步發生變化,反向流對射流孔下游流域產生逆流向的推動作用,致使摩擦阻力下降。因此,隨著射流速度逐漸增加,射流孔下游流域漩渦不斷發展,影響下游減阻流域范圍變大,表現出明顯的減阻效果;此外,當旋轉速度增加到一定程度時,由于漩渦的作用,使相鄰射流孔之間的邊界層的速度梯度增大,壁面切應力增大,致使摩擦阻力增加,此時,減阻率變化梯減小。
在實驗模型旋轉過程中,射流孔在沿旋轉方向下游一側形成漩渦,漩渦的不斷發展變化致使射流孔壁面附近產生反向流,反向流速度隨漩渦的發展而增大,最終對出口射流產生逆流向的推動作用,導致了摩擦阻力下降,呈現出減阻趨勢。但是,漩渦運動的能量一方面來自于自身動力作用,另一方面來自外界流場的作用,近壁面處外界流場在為射流孔下游漩渦運動提供一定能量后其自身速度降低,將無法繼續提供足夠的能量去推動下一個漩渦運動,只有當外界流場本身獲得一定能量后,才能繼續完成下一次能量的傳遞過程,這就需要射流自身提供能量,因此,隨著射流速度的增加,減阻率變大。隨著旋轉速度繼續增加,射流表面所受到水的黏性阻力越來越大,漩渦所能提供的減阻變化梯度小于水黏性阻力所產生的增阻變化梯度,實驗模型表面流場接近于光滑表面,減阻效果逐漸削弱;當漩渦所能提供的減阻變化梯度完全不能克服黏性阻力所產生的增阻變化梯度時,呈現出增阻狀態。根據以上對射流減阻特性分析,可以推測:在射流孔徑一定情況下,存在1個合適的旋轉速度使射流表面減阻效果達到最佳;在射流孔徑不同情況下,射流過程中所形成漩渦大小、結構、速度、運動狀態等特性不盡相同;同時,射流孔排布、射流速度等均對射流過程中形成漩渦有影響作用。因此,射流孔徑、射流孔排布、外界流場速度、射流速度等相關因素都直接影響著射流表面的減阻特性。
4 結論
(1)仿生射流表面能夠改變水對其表面的摩擦阻力,具有一定的減阻效果,減阻率與實驗模型轉速、射流孔徑、射流速度密切相關。
(2)當射流孔徑一定、旋轉速度在3 000 r/min以上時,減阻率隨著實驗模型旋轉速度的增而增加,最大減阻率為10.8%。
(3)實驗模型表面分布垂直射流孔具有較好的減阻效果,下一步需要探索非垂直射流孔情況下射流減阻特性,射流孔排布、射流孔不同形狀對減阻效果的影響,以及射流各相關因素之間相互耦合情況對射流表面減阻特性的影響。
[1]李新華, 董守平, 趙志勇. 平板及減阻溝槽表面雷諾應力的實驗研究[J]. 實驗流體力學, 2006, 20(1): 40-44.LI Xin-hua, DONG Shou-ping, ZHAO Zhi-yong. Experimental study on Reynolds shear stress in turbulent boundary layers over smooth and drag reduction grooved surface[J]. Journal of Experiments in Fluid Mechanics, 2006, 20(1): 40-44.
[2]Koeltzsch K, Dinkelacker A, Grundmann R. Flow over convergent and divergent wall riblets[J]. Experiments in Fluids,2002, 33(2): 346-350.
[3]黃橋高, 潘光, 胡海豹, 等. 脊狀表面航行器模型減阻特性的水洞實驗研究[J]. 實驗流體力學, 2010, 24(3): 50-53.HUANG Qiao-gao, PAN Guang, HU Hai-bao, et al.Investigation about drag reduction characteristic of riblets surface on vehicle model in water tunnel[J]. Journal of Experiments in Fluid Mechanics, 2010, 24(3): 50-53.
[4]張成春, 任露泉, 劉慶平, 等. 旋成體仿生凹坑表面減阻試驗研究[J]. 空氣動力學學報, 2008, 26(1): 79-84.ZHANG Cheng-chun, REN Lu-quan, LIU Qing-ping, et al.Experimental study on bionic dimpled surfaces of bodies of revolution for drag reduction[J]. Acta Aerodynamica Sinica,2008, 26(1): 79-84.
[5]Viswanath P R. Aircraft viscous drag reduction using riblets[J].Progress in Aerospace Sciences, 2002, 38(6): 571-600.
[6]Han M, Lim H C, Jang Y G, et al. Fabrication of a micro riblet film and drag reduction effects on curved objects[C]//12th International Conference on Solid-State Sensors, Actuators and Microsystems. Boston: IEEE Electron Devices Society, 2003:396-399.
[7]Wang J J, Lan S L, Chen G. Experimental study on the turbulent boundary layer flow over riblets surface[J]. Fluid Dynamics Research, 2000, 27(4): 217-229.
[8]張成春, 任露泉, 王晶. 旋成體仿生凹環表面減阻試驗分析及數值模擬[J]. 吉林大學學報: 工學版, 2007, 37(1): 100-105.ZHANG Cheng-chun, REN Lu-quan, WANG Jing. Experiment and numerical simulation on drag reduction for bodies of revolution using bionic scrobiculate ringed surface[J]. Journal of Jilin University: Engineering and Technology Edition, 2007,37(1): 100-105.
[9]劉志華, 董文才, 熊鷹. 雷諾數對溝槽減阻特性影響的數值分析[J]. 海軍工程大學學報, 2007, 19(2): 6-11.LIU Zhi-hua, DONG Wen-cai, XIONG Ying. Numerical analysis of the effect of Reynolds number on drag reduction by grooved surface[J]. Journal of Naval University of Engineering, 2007,19(2): 6-11.
[10]Zheng Z C. Effects of flexible walls on radiated sound from a turbulent boundary layer[J]. Journal of Fluids and Structures,2003, 18(1): 93-101.
[11]Pavlov V V. Dolphin skin as a natural anisotropic compliant wall[J]. Bioinspiration and Biomimetics, 2006, 1(2): 31-40.
[12]Huang J C, Johnson M W. Boundary layer receptivity measurements on compliant surfaces[J]. International Journal of Heat and Fluid Flow, 2008, 29(2): 495-503.
[13]Fish F E. The myth and reality of Gray’s paradox: Implication of dolphin drag reduction for technology[J]. Bioinspiration and Biominetics, 2006, 1(2): 17-25.
[14]Li M T, Ren L Q, Lin Q P, et al. The mechanism of drag reduction around bodies of revolution using bionic non-smooth surfaces[J]. Journal of Bionic Engineering, 2007, 4(2): 109-116.
[15]ZHAO Gang, ZHAO Hua-lin, SHU Hai-sheng, et al. Simulation study of bionic jetting direction influence on drag reduction effect[J]. Advances in Nature Science, 2010, 3(2): 17-26.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03
