APID:一種自適應(yīng)調(diào)節(jié)參數(shù)的擁塞控制器
2012-08-01 05:39:12楊湘王建新
中南大學(xué)學(xué)報(bào)(自然科學(xué)版) 2012年11期
楊湘 ,王建新
(1.中南大學(xué) 信息科學(xué)與工程學(xué)院,湖南 長(zhǎng)沙,410083;2.武漢科技大學(xué) 計(jì)算機(jī)科學(xué)與技術(shù)學(xué)院,湖北 武漢,430081)
隨著Internet規(guī)模越來(lái)越大,Internet的擁塞控制作為保證網(wǎng)絡(luò)性能的手段也顯得越來(lái)越重要。Floyd等[1]提出RED(Random early detection)算法之后,在路由器上部署AQM[2](Active queue management)模塊,并配合源端的TCP協(xié)議來(lái)調(diào)整流量以緩解擁塞的機(jī)制也逐漸被人們所認(rèn)同并廣泛采用。但是,RED以及一些變種算法[3-7]提出后,算法性能只能依靠仿真實(shí)驗(yàn)來(lái)進(jìn)行評(píng)價(jià),缺乏一些理論工具來(lái)分析性能,并指導(dǎo)算法設(shè)計(jì)。隨后,人們利用控制理論、優(yōu)化理論等工具來(lái)對(duì)AQM算法進(jìn)行分析與設(shè)計(jì),提出了一系列的AQM算法。Low等[8-9]基于流量控制對(duì)偶模型提出了REM(Random exponential marking)算法,試圖在獲得高帶寬利用率的同時(shí)降低延遲。Misra等[10]對(duì)TCP/AQM模型進(jìn)行分析,建立了非線性TCP流量控制模型,提出一對(duì)非線性微分方程描述了TCP流和AQM控制器的瞬態(tài)行為;而Hollot等[11-12]利用小信號(hào)理論對(duì)此模型進(jìn)行線性化處理后,將其等效為帶反饋延遲的二階反饋控制系統(tǒng),得到了TCP/AQM反饋控制系統(tǒng)簡(jiǎn)化的系統(tǒng)模型,并在此基礎(chǔ)上提出了一種比例-積分控制器PI。隨后,人們基于線性控制理論提出了一系列的AQM算法[13-19]。基于傳統(tǒng)線性控制理論設(shè)計(jì)的擁塞控制器的穩(wěn)定性在很大程度上依賴于受控對(duì)象的數(shù)學(xué)模型精度,因此,人們采用了智能控制、非線性控制理論等來(lái)設(shè)計(jì)了一些擁塞控制器[20-28],以使得各控制器能適應(yīng)網(wǎng)絡(luò)狀態(tài)的動(dòng)態(tài)變化。但是,這些算法普遍存在過(guò)程復(fù)雜、計(jì)算量偏大、在大規(guī)模網(wǎng)絡(luò)中無(wú)法實(shí)際部署的缺點(diǎn)。基于線性控制理論設(shè)計(jì)的擁塞控制器具有計(jì)算小,易于部署的特點(diǎn),這類算法在動(dòng)態(tài)網(wǎng)絡(luò)中的性能表現(xiàn)并非很好,RED,REM,PI,LRED[16]和AOPC[13]等忽略了網(wǎng)絡(luò)延遲對(duì)穩(wěn)定性的影響,DC-AQM[14]和IMC-PID[15]等雖然考慮了延時(shí)補(bǔ)償,但是,這些算法參數(shù)的計(jì)算依賴于固定的網(wǎng)絡(luò)參數(shù)(即往返延時(shí)、網(wǎng)絡(luò)中活動(dòng)流的數(shù)目以及鏈路帶寬),當(dāng)網(wǎng)絡(luò)狀態(tài)發(fā)生變化,算法參數(shù)與當(dāng)前網(wǎng)絡(luò)狀態(tài)失配,算法性能會(huì)受到影響。在此,本文作者提出一種自適應(yīng)調(diào)節(jié)參數(shù)的PID擁塞控制器APID。
1 往返延時(shí)RTT對(duì)網(wǎng)絡(luò)性能的影響
TCP/AQM擁塞控制系統(tǒng)本質(zhì)上是一個(gè)帶有反饋延時(shí)的閉環(huán)控制系統(tǒng)。當(dāng)網(wǎng)絡(luò)狀態(tài)變化時(shí),其性能表現(xiàn)因參數(shù)與實(shí)際網(wǎng)絡(luò)狀態(tài)失配而受到較大影響。表1中給出了從中南大學(xué)訪問(wèn)幾個(gè)國(guó)外站點(diǎn)的往返延時(shí)統(tǒng)計(jì)情況。從表1可以看出:在1 d中,延時(shí)的變化很明顯,忽略網(wǎng)絡(luò)延遲和固定參數(shù)設(shè)置的方法都無(wú)法很好地適應(yīng)網(wǎng)絡(luò)狀態(tài)的動(dòng)態(tài)變化。
為了研究AQM算法在往返延時(shí)(Round trip time,RTT)變化情況下的性能,選取了PI,REM,IMC-PID,LRED和AOPC幾種具有代表性的AQM算法進(jìn)行仿真實(shí)驗(yàn)。仿真實(shí)驗(yàn)采用經(jīng)典的啞鈴狀單瓶頸鏈路拓?fù)浣Y(jié)構(gòu)(如圖1所示)。瓶頸鏈路R1-R2的帶寬為15×106bit/s,路由器緩沖區(qū)設(shè)為300個(gè)分組長(zhǎng)度,目標(biāo)隊(duì)列長(zhǎng)度設(shè)置為150個(gè)分組長(zhǎng)度,平均每個(gè)分組為500字節(jié)。在各算法的參數(shù)設(shè)置方面,PI和IMC-PID算法按照活動(dòng)流數(shù)目為60、瓶頸鏈路帶寬15×106bit/s (3 750 packets/s)、往返延時(shí)400 ms來(lái)計(jì)算控制器參數(shù);REM算法按照原仿真實(shí)驗(yàn)[9]參數(shù)進(jìn)行設(shè)置;LRED算法參數(shù)配置中丟包率計(jì)算權(quán)重系數(shù)為0.1,丟包率測(cè)量時(shí)間間隔為1.0 s,丟包率計(jì)算歷史值個(gè)數(shù)為4,β=0.001。在實(shí)驗(yàn)過(guò)程中,將S1,S2和S3改為D1,D2和D3的鏈路傳輸延遲分別為100,400和700 ms,觀察各算法在帶寬利用率、平均隊(duì)列長(zhǎng)度以及隊(duì)列長(zhǎng)度標(biāo)準(zhǔn)差等性能指標(biāo)見(jiàn)表2。

表1 中南大學(xué)到一些著名機(jī)構(gòu)網(wǎng)站的RTT統(tǒng)計(jì)Table1 RTT statistics between CSU and some famous organizations’ website ms

圖1 單瓶頸鏈路仿真拓?fù)鋱DFig.1 Network topology of single-bottleneck simulation
從表2可以看出:當(dāng)往返延遲RTT為100 ms時(shí),各種算法均有很好的性能,帶寬利用率都達(dá)到了98%以上,隊(duì)列的均值都與目標(biāo)值150個(gè)分組相差不大,同時(shí)隊(duì)列的抖動(dòng)情況也較好;當(dāng)RTT為400 ms時(shí),除了IMC-PID之外,各算法性能與鏈路傳輸延遲為100 ms時(shí)比較均有明顯下降,而IMC-PID由于此時(shí)處于控制器參數(shù)與網(wǎng)絡(luò)狀態(tài)匹配的狀態(tài),鏈路帶寬以及隊(duì)列穩(wěn)定性均比鏈路傳輸延遲為100 ms時(shí)有所提升;而當(dāng)RTT增加到700 ms時(shí),各算法性能均出現(xiàn)明顯下降,帶寬利用率下降,同時(shí),隊(duì)列長(zhǎng)度到目標(biāo)隊(duì)列長(zhǎng)度的偏離值增大且隊(duì)列抖動(dòng)更加劇烈。

表2 RTT變化情況下各算法的性能表現(xiàn)Table2 Performances of algorithms with RTT varying
2 自適應(yīng)調(diào)節(jié)參數(shù)的擁塞控制器
2.1 TCP/AQM擁塞控制系統(tǒng)
Misra等[10]基于流體流理論建立了TCP Reno的擁塞避免階段流量控制的非線性模型,同時(shí)用一對(duì)微分方程來(lái)描述TCP Reno的擁塞控制機(jī)制的瞬態(tài)行為;隨后Hollot等[11]得到了TCP/AQM聯(lián)合控制系統(tǒng)的系統(tǒng)框圖(見(jiàn)圖2)以及近似描述整個(gè)系統(tǒng)控制機(jī)制的簡(jiǎn)化模型。
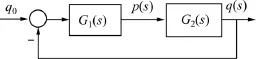
圖2 TCP/AQM聯(lián)合控制系統(tǒng)框圖Fig.2 Block diagram illustrating TCP/AQM control
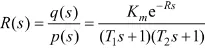
如圖2所示,G1(s)為AQM控制器,G2(s)為TCP窗口調(diào)整和路由器緩沖隊(duì)列模塊,它是受控對(duì)象,G2(s)的傳遞函數(shù)R(s)如下:

2.2 TCP/AQM擁塞控制機(jī)制下隊(duì)列長(zhǎng)度和丟包概率之間的關(guān)系
若將G2(s)作為受控對(duì)象,則q(s)和p(s)則為此過(guò)程的輸出和輸入;而G1(s)則可以看成是回路反饋。在本文提出的方法中,通過(guò)研究G2(s),得到隊(duì)列長(zhǎng)度q(s)和丟棄概率p(s)之間的關(guān)系表達(dá)式,然后,通過(guò)在路由器上采集到的隊(duì)列長(zhǎng)度和丟棄概率的數(shù)據(jù),計(jì)算出在G1(s)影響下的路由器中隊(duì)列長(zhǎng)度q(s)和丟棄概率p(s)關(guān)系表達(dá)式中的各個(gè)參數(shù),并進(jìn)一步利用這些參數(shù)計(jì)算出符合當(dāng)前網(wǎng)絡(luò)環(huán)境的PID控制器的參數(shù)。
定理1 給定一個(gè)受控過(guò)程G(s),其傳遞函數(shù)為:
其中:q(s)和p(s)為此過(guò)程的輸出和輸入。若采用采樣周期T=R,可得到q和p之間的離散關(guān)系表達(dá)式如下:

其中:Q(z)和P(z)為受控對(duì)象G2(z)所代表的控制器的輸出和輸入信號(hào)。

證畢。
2.3 自適應(yīng)調(diào)節(jié)參數(shù)的擁塞控制器的設(shè)計(jì)和實(shí)現(xiàn)
為了計(jì)算擁塞控制器各參數(shù),首先計(jì)算得到θ0,θ1以及θ2等參數(shù),然后,根據(jù)式(2)求得符合當(dāng)前網(wǎng)絡(luò)狀態(tài)的Km,T1以及T2,用以計(jì)算擁塞控制器的參數(shù)。
在本文提出的方法中,取最近的3個(gè)采樣周期中測(cè)量得到的隊(duì)列長(zhǎng)度q(k),q(k-1),q(k-2)以及丟包概率p(k-1),代入式(2),并聯(lián)立得到包含3個(gè)方程的方程組,這個(gè)方程組只包含了3個(gè)未知數(shù)θ0,θ1以及θ2;同時(shí)可以看出:這個(gè)方程組為一個(gè)非齊次線性方程組,不存在奇異解。這樣,通過(guò)解這個(gè)方程組,可以得到θ0,θ1以及 θ2。然后,可以通過(guò)式(1)和(2)計(jì)算得到Km,T1,T2和R。由于采用內(nèi)膜控制的方法估計(jì)PID控制器的參數(shù)能夠很好地消除時(shí)滯對(duì)系統(tǒng)性能的影響,因此,利用IMC-PID中的方法,計(jì)算得到PID控制器中3個(gè)控制參數(shù)。在IMC-PID中,采用理想PIDγ=2,ε=0.5R時(shí),可以得到控制器參數(shù)Kc,Ti,Td與Km,T1以及T2等參數(shù)之間的關(guān)系式如下:
第k個(gè)時(shí)間間隔中分組丟棄概率的計(jì)算表達(dá)式如下:

當(dāng)路由器收到一個(gè)數(shù)據(jù)包時(shí),根據(jù)式(6)以及結(jié)合保存在路由器上的丟包概率和隊(duì)列長(zhǎng)度的歷史數(shù)據(jù),可計(jì)算出丟包概率,依據(jù)此丟包概率對(duì)收到的數(shù)據(jù)包進(jìn)行丟棄。由于式(6)中Kc,Ti,Td等參數(shù)是符合當(dāng)前網(wǎng)絡(luò)狀態(tài)的控制器參數(shù),因此,依據(jù)此控制器調(diào)節(jié)丟包概率,就不會(huì)出現(xiàn)當(dāng)網(wǎng)絡(luò)狀態(tài)發(fā)生變化時(shí)因控制器參數(shù)失配導(dǎo)致網(wǎng)絡(luò)穩(wěn)定性變差,最終使得隊(duì)列抖動(dòng)加大,鏈路帶寬利用率降低的現(xiàn)象。APID通過(guò)周期性地計(jì)算符合當(dāng)前網(wǎng)絡(luò)狀態(tài)的控制器參數(shù),對(duì)控制器進(jìn)行配置,能夠保證路由器緩沖隊(duì)列的穩(wěn)定,提高鏈路的帶寬利用率。
3 仿真實(shí)驗(yàn)與性能分析
在仿真平臺(tái)NS2[29]上對(duì)APID擁塞控制器在單瓶頸鏈路和多瓶頸鏈路上進(jìn)行了仿真實(shí)驗(yàn),并將其與PI,REM,IMC-PID,AOPC和LRED等算法的帶寬利用率、隊(duì)列長(zhǎng)度平均值以及隊(duì)列長(zhǎng)度標(biāo)準(zhǔn)差等性能指標(biāo)進(jìn)行了比較。
3.1 單瓶頸鏈路拓?fù)浣Y(jié)構(gòu)
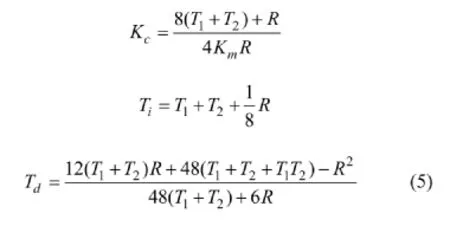
在本次實(shí)驗(yàn)中,網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)、網(wǎng)絡(luò)各節(jié)點(diǎn)、鏈路參數(shù)配置以及各算法參數(shù)配置均與本文實(shí)驗(yàn)所采用的參數(shù)配置一致,往返延遲為100,400和700 ms情況下,APID算法的帶寬利用率、平均隊(duì)列長(zhǎng)度以及隊(duì)列長(zhǎng)度標(biāo)準(zhǔn)差的仿真實(shí)驗(yàn)結(jié)果如表3所示。
比較表2和表3可以看出:本文提出的算法在幾種傳輸延遲環(huán)境下,都具有較好的帶寬利用率,即使在RTT為700 ms,其他算法的帶寬利用率急劇下降的情況下,APID仍然能夠使得帶寬利用率達(dá)到95%以上;同時(shí),APID能夠更好地控制隊(duì)列長(zhǎng)度(使其更接近于目標(biāo)隊(duì)列長(zhǎng)度,同時(shí)隊(duì)列抖動(dòng)更小),在RTT為700 ms的情況下,其他算法影響下的路由器隊(duì)列長(zhǎng)度已經(jīng)嚴(yán)重偏離了預(yù)先設(shè)定的目標(biāo)隊(duì)列長(zhǎng)度,而APID算法仍然能夠保持平均隊(duì)列長(zhǎng)度為127.906 4,同時(shí),隊(duì)列標(biāo)準(zhǔn)差為46.336 8,此隊(duì)列長(zhǎng)度標(biāo)準(zhǔn)差與RTT為100 ms和400 ms時(shí)的相差不大(分別為48.800 4和46.863 0)。LRED和AOPC由于忽略了延時(shí)對(duì)算法性能的影響,所以在延遲很小的情況下具有很好的性能,但是在延遲加大之后算法性能惡化很明顯,以LRED為例,RTT為100 ms的情況能夠保持98%以上的帶寬利用率,平均隊(duì)列長(zhǎng)度為157.659 2個(gè)分組長(zhǎng)度,隊(duì)列標(biāo)準(zhǔn)差為19.388 4;但是,當(dāng)RTT增加到700 ms時(shí),帶寬利用率下降到77.276 3%,平均隊(duì)列長(zhǎng)度為48.466 2,嚴(yán)重偏離了目標(biāo)隊(duì)列長(zhǎng)度,隊(duì)列長(zhǎng)度標(biāo)準(zhǔn)差也變?yōu)?5.307 3,結(jié)合48.466 2的平均隊(duì)列長(zhǎng)度來(lái)看,此時(shí)的隊(duì)列抖動(dòng)已經(jīng)非常劇烈。同樣,PI和IMC-PID等算法在網(wǎng)絡(luò)參數(shù)失配的情況下(傳輸延遲為100 ms和700 ms),與在參數(shù)匹配的情況(傳輸延遲為400 ms)相比,對(duì)隊(duì)列長(zhǎng)度的控制也明顯變?nèi)酰瑤捓寐氏陆得黠@。以IMC-PID為例,隊(duì)列長(zhǎng)度均值從146.738 1(RTT為400 ms)變成49.204 5(RTT為700 ms),嚴(yán)重地偏離了目標(biāo)隊(duì)列長(zhǎng)度;隊(duì)列標(biāo)準(zhǔn)差值也從44.316 8個(gè)分組(RTT為400 ms)增大到47.718 6個(gè)分組(RTT為700 ms),注意到RTT為700 ms的情況下IMC-PID的平均隊(duì)列長(zhǎng)度只有49.204 5個(gè)分組長(zhǎng)度,47.7186個(gè)分組長(zhǎng)度的隊(duì)列長(zhǎng)度標(biāo)準(zhǔn)差意味著很劇烈的隊(duì)列抖動(dòng)。而APID由于能夠根據(jù)網(wǎng)絡(luò)狀態(tài)動(dòng)態(tài)的調(diào)整控制器的參數(shù),使得隊(duì)列長(zhǎng)度更加接近于目標(biāo)隊(duì)列長(zhǎng)度(RTT為700 ms時(shí)偏離值最大,隊(duì)列長(zhǎng)度平均值為127.906 4個(gè)分組長(zhǎng)度,偏離值約為23個(gè)分組長(zhǎng)度);同時(shí),隊(duì)列抖動(dòng)更小(3種情形下的隊(duì)列長(zhǎng)度標(biāo)準(zhǔn)差變化不大,分別為48.800 4,46.863 0和46.336 8),鏈路的帶寬利用率也更高(RTT為700 ms時(shí)帶寬利用率最低為95.465 2%)。
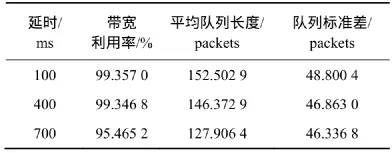
表3 單瓶頸鏈路拓?fù)浣Y(jié)構(gòu)下APID算法的性能Table3 Performances of APID algorithm in network with single-bottleneck topology
3.2 多瓶頸鏈路拓?fù)浣Y(jié)構(gòu)
本次實(shí)驗(yàn)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)如圖3所示,網(wǎng)絡(luò)配置如下:R3-R4鏈路帶寬為5×106bit/s,其他鏈路帶寬均為15×106bit/s。120條TCP流從最左邊發(fā)送方(S1,S2, …, Sn)向最右邊的接收方(R1, R2, …, Rn)傳送數(shù)據(jù),其中,2對(duì)背景流的數(shù)目為90個(gè)TCP流,分別經(jīng)由R2-R3和R4-R5 2條瓶頸鏈路從Cross Traffic Senders發(fā)往Cross Traffic Receivers。各算法參數(shù)配置與本文第1節(jié)仿真實(shí)驗(yàn)中一致,設(shè)置往返延時(shí)分別為100,400和700 ms。在本次實(shí)驗(yàn)中,R2-R3,R3-R4,R4-R5均為瓶頸鏈路,而仿真統(tǒng)計(jì)結(jié)果發(fā)現(xiàn)它們的隊(duì)列長(zhǎng)度變化有很大的相似性。表4所示為R3-R4鏈路上的帶寬利用率、隊(duì)列長(zhǎng)度均值和標(biāo)準(zhǔn)差。
從表4可以看出:在多瓶頸鏈路網(wǎng)絡(luò)拓?fù)淝闆r下,APID具有較好的帶寬利用率、更接近于目標(biāo)隊(duì)列長(zhǎng)度的平均隊(duì)列長(zhǎng)度以及更小的隊(duì)列抖動(dòng);而LRED和AOPC忽略了往返延時(shí)的影響,使得這些算法在延遲很小只有100 ms的情況下,帶寬利用率均能在99%以上,同時(shí),平均隊(duì)列長(zhǎng)度分別約為161個(gè)分組長(zhǎng)度和157個(gè)分組長(zhǎng)度,都非常接近設(shè)定的目標(biāo)隊(duì)列長(zhǎng)度,隊(duì)列長(zhǎng)度標(biāo)準(zhǔn)差比較合理,分別約為25和15;但是,在延時(shí)變大時(shí),算法性能下降很明顯,在RTT為700 ms時(shí),帶寬利用率降低到73.094 6%和77.332 0%,平均隊(duì)列長(zhǎng)度分別為50.505 1個(gè)分組長(zhǎng)度和55.327 0個(gè)分組長(zhǎng)度,嚴(yán)重地偏離了目標(biāo)隊(duì)列長(zhǎng)度,同時(shí),隊(duì)列標(biāo)準(zhǔn)差分別為48.904 1個(gè)分組長(zhǎng)度和48.376 8個(gè)分組長(zhǎng)度,與此時(shí)的平均隊(duì)列長(zhǎng)度相比,隊(duì)列的抖動(dòng)非常劇烈。同樣,其他算法如PI和IMC-PID等由于參數(shù)失配,也有帶寬利用率下降、平均隊(duì)列長(zhǎng)度越來(lái)越偏離目標(biāo)隊(duì)列長(zhǎng)度以及隊(duì)列長(zhǎng)度抖動(dòng)加大等問(wèn)題。而APID算法能夠根據(jù)當(dāng)前網(wǎng)絡(luò)狀態(tài)自適應(yīng)地調(diào)整控制器參數(shù),使得隊(duì)列長(zhǎng)度更好地穩(wěn)定在預(yù)先設(shè)定的隊(duì)列長(zhǎng)度附近,具有更小的隊(duì)列標(biāo)準(zhǔn)差即更小的隊(duì)列抖動(dòng),并能提供更高的帶寬利用率。
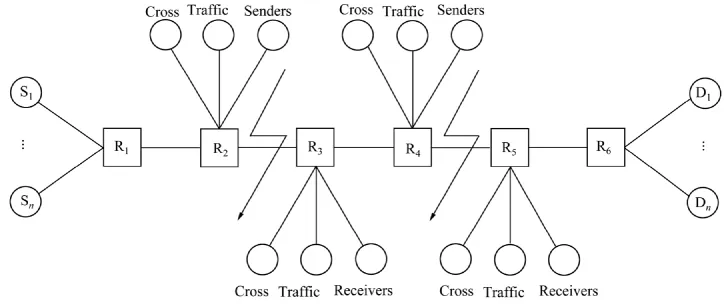
圖3 交叉式多瓶頸鏈路拓?fù)鋱DFig.3 Performances of algorithms in network with multi-bottleneck topology
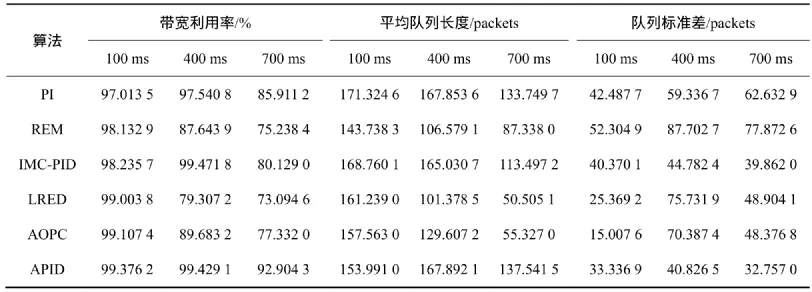
表4 多瓶頸鏈路拓?fù)浣Y(jié)構(gòu)下各算法的性能表現(xiàn)Table4 Performances of algorithms in topology with multi-bottleneck
4 結(jié)論
(1)通過(guò)分析TCP/AQM擁塞控制機(jī)制中受控過(guò)程的傳遞函數(shù),得到受控過(guò)程隊(duì)列長(zhǎng)度和丟包概率之間的關(guān)系,并在此基礎(chǔ)上,提出了一種根據(jù)當(dāng)前網(wǎng)絡(luò)狀態(tài)自適應(yīng)調(diào)節(jié)參數(shù)的PID控制器APID。
(2)在NS2上對(duì)APID進(jìn)行了測(cè)試,并與PI,REM,AOPC,LRED和IMC-PID等進(jìn)行比較。測(cè)試結(jié)果表明,當(dāng)網(wǎng)絡(luò)狀態(tài)動(dòng)態(tài)變化的情況下,APID能夠使得路由器隊(duì)列長(zhǎng)度更接近于預(yù)先設(shè)定的目標(biāo)隊(duì)列長(zhǎng)度,能夠使得緩沖隊(duì)列抖動(dòng)更小,同時(shí)能夠獲得更高的鏈路帶寬利用率。
[1]Floyd S, Jacobson V.Random early detection gateways for congestion avoidance[J].IEEE/ACM Transactions on Networking,1993, 1(4): 397-413.
[2]IETF RFC 2309, Recommendations on queue management and congestion avoidance in the Internet[S].
[3]Ott T, Lakshman T, Wong L.SRED: Stabilized RED[C]//Proceedings of IEEE INFOCOM.New York: IEEE Press, 1999:1346-1355.
[4]Floyd S, Gummadi R, Shenker S.Adaptive RED: An algorithm for increasing the robustness of RED’s active queue management[EB/OL].[2001-03-20].http://www.icir.org/floyd/papers/adaptiveRed.pdf.
[5]SUN Jin-sheng, Ko K, CHEN Guan-rong, et al.PD-RED: To improve the performance of RED[J].IEEE Communications Letters, 2003, 7(8): 406-408.
[6]WANG Chong-gang, LIU Jiang-chuan, LI Bo, et al.LRED: A robust and responsive AQM algorithm using packet loss ratio measurement[J].IEEE Transaction on Parallel and Distributed Systems, 2007, 18(1): 29-43.
[7]CHEN Wu, YANG Shuang-hua.The mechanism of adapting RED parameters to TCP traffic[J].Computer Communications,2009, 32(13/14): 1525-1530.
[8]Low S H.A duality model of TCP and queue management algorithms[J].IEEE/ACM Transaction on Networking, 2003,11(4): 525-536.
[9]Athuraliya S, Low S H, Li V H, et al.REM: Active queue management[J].IEEE Network Magazine, 2001, 15(3): 48-53.
[10]Misra V, GONG Wei-bo, Towsley D.Fluid-based analysis of a network of AQM routers supporting TCP flows with an application to RED[C]//Proceedings of Special Interest Group on Data Communications(SIGCOMM).Stockholm: ACM Press,2000: 151-160.
[11]Hollot C, Misra V, Towsley D, et al.A control theoretic analysis of RED[C]//Proceedings of IEEE INFOCOM.Anchorage: IEEE Press, 2001: 1510-1519.
[12]Hollot C, Misra V, Towsley D, et al.On designing improved controllers for AQM routers supporting TCP flows[C]//Proceedings of IEEE INFOCOM.Anchorage: IEEE Press, 2001:1726-1734.
[13]WANG Jian-xin, RONG Liang.AOPC: An adaptive optimized proportional controller for AQM[C]//Proceedings of International Conference on Parallel Processing (ICPP).Columbus, Ohio,2006: 164-171.
[14]任豐原, 林闖, 任勇, 等.大時(shí)滯網(wǎng)絡(luò)中的擁塞控制算法[J].軟件學(xué)報(bào), 2003, 14(3): 503-511.REN Feng-yuan, LIN Chuang, REN Yong, et al.Congestion control algorithm in large-delay networks[J].Journal of Software,2003, 14(3): 503-511.
[15]WANG Jian-xin, RONG Liang, LIU Yun-hao.Design of a stabilizing AQM controller for large-delay networks based on internal model control[J].Computer Communications, 2008,30(10): 1911-1918.
[16]WANG Chong-gang, LI Bin, Hou T Y, et al.LRED: A robust active queue management scheme based on packet loss ratio[C]//Proceedings of IEEE INFOCOM.Hong Kong: IEEE Press, 2004: 1-12.
[17]XIAO Yang, WANG Lei, NIU Jun, et al.Congestion control algorithms for a new TCP/UDP router based on 2-D stability conditions[C]//Proceedings of 5th International Conference on Wireless Communications, Networking and Mobile Computing.Beijing: IEEE Press, 2009: 1-5.
[18]Ivan D B, Gonzalo R A, Bohacek S.Statistical approach for congestion control in gateway routers[J].Computer Networks,2011, 55(3): 572-582.
[19]Luca D C, Mascoloa S, Niculescu S I.Robust stability analysis of Smith predictor-based congestion control algorithms for computer networks[J].Automatica, 2011, 47(8): 1685-1692.
[20]ZHANG Yan-bin, HANG Da-ming, MA Zheng-xin, et al.A robust active queue management algorithm based on reinforcement learning[J].Journal of Software, 2004, 15(7):1090-1098.
[21]FAN Yan-fei, REN Feng-yuan, LIN Chuang.Design an active queue management algorithm based on fuzzy logic decision[C]//Proceedings of IEEE ICCT.New York: IEEE Press, 2003:286-289.
[22]FAN Yan-fei, LIN Chuang, REN Feng-yuan, et al.An intelligent packet dropping algorithm with ECN capability[J].Journal of Software, 2005, 16(9): 1636-1646.
[23]WANG Li, DU Shu-xin, LIN Jin-guo.An active queue management scheme using neural network based predictive control[C]//Proceedings of The 30th Annual Conference of the IEEE Industrial Electronics Society.Busan: IEEE Press, 2004:2556-2559.
[24]Rahnami K, Arabshahi P, Gray A.Neural network based model reference controller for active queue management of TCP flows[C]//Proceedings of IEEE Aerospace Conference.Big Sky:IEEE Press, 2005: 1696-1704.
[25]WANG Hao, TIAN Zuo-hua, ZHANG Qin-long.Self-tuning price-based congestion control supporting TCP networks[C]//Proceedings of IEEE ICCCN.Zurich: IEEE Press, 2010: 1-6.
[26]WANG Hao, TIAN Zuo-hua.Intelligent price-based congestion control for communication networks[C]//Proceedings of IEEE IWQoS.Beijing: IEEE Press, 2010: 1-5.
[27]Zheng F, Nelson J.Anapproach to the controller design of AQM routers supporting TCP flows[J].Automatica, 2009, 45(3):757-763.
[28]Papachristodoulou A, Jadbabaie A.Delay robustness of nonlinear internet congestion control schemes[J].IEEE Transactions on Automatic Control, 2010, 55(6): 1421-1427.
[29]UCN/LBL/VINT.Network Simulator-NS2[EB/OL].[2010-05-14].http://www-mash.cs.berkeley.edu/ns.
