基于稀疏存儲Elman神經網絡的直線伺服控制
2012-09-08 07:58:08左健民汪木蘭
中國機械工程 2012年1期
左健民 潘 超 汪木蘭
1.江蘇大學,鎮江,212013 2.江蘇技術師范學院,常州,213001
3.上海鐵路局,上海,200071 4.南京工程學院,南京,211167
0 引言
電動機直接帶動負載實現“零傳動”是理想高效的傳遞方式,永磁直線同步電動機(permanent magnet linear synchronous motor,PMLSM)取消了電機到負載之間的機械傳動環節,由電動機直接驅動工作部件運動[1],力能指標高,體積小,重量輕,具有響應速度快、靈敏度高、隨動性好、容易獲得高速度和高加速度的優點,是高性能數控機床進給系統的理想部件。但從控制角度分析,直線交流伺服系統是一個非線性、強耦合和時變性的復雜系統;從數控機床的工作狀態分析,進給系統又是重復運動的非線性動態系統,工作過程中受到切削力變化、負載變化等各種外部擾動的影響。因此要想實現對數控機床直線進給伺服系統的控制,既要對控制對象的結構和參數有清楚的認識,又要考慮其存在的模型攝動、端部效應及負載擾動等不確定因素[2]。
神經網絡具有自組織、自學習和分布式存儲等特點,能以任意精度逼近任意連續復雜的非線性函數,具有很好的魯棒性。其中,動態遞歸神經網絡通過存儲內部狀態,具有映射動態特性的功能和適應時變特性的能力,適合于高性能數控機床直線伺服系統的控制[3-4]。
本文提出具有稀疏存儲功能的改進Elman神經網絡,利用前一次或前幾次的控制信息來提高進給系統的動態性能[5],并對網絡存儲的歷史控制信息進行稀疏存儲、選擇利用,以提高網絡的收斂速度和泛化能力,該網絡具有局部逼近的快速性和遞歸神經網絡的動態性能,在保證動態性能的同時減小了伺服控制器的計算量和存儲空間,滿足了直線伺服系統實時性的要求。
1 稀疏存儲Elman神經網絡設計
1.1 標準Elman神經網絡
Elman網絡是一種典型的動態遞歸神經網絡,因其“部分遞歸、全局前饋”的結構兼備多層前饋神經網絡的優點,在直線伺服系統的控制中得到良好的應用[6-7]。
標準Elman神經網絡結構如圖1所示。它具有輸入層、隱層、鏈接層和輸出層四層神經元[8]。鏈接層主要用來記憶網絡的“內部狀態”,通過動態遞歸過程反映出所有歷史信息對當前系統的影響,直接反應系統動態過程,具有適應時變特性的能力。
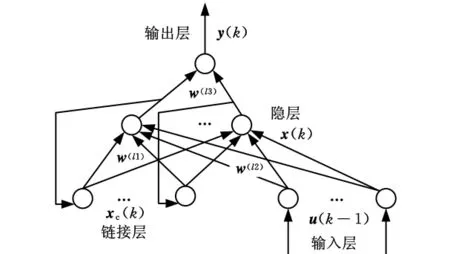
圖1 標準Elman神經網絡結構圖
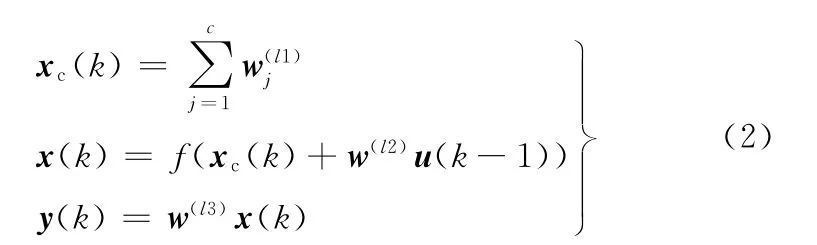
設網絡輸入為u(k-1),輸出為y(k),隱層輸出為x(k),鏈接層的輸出為xc(k),則該神經網絡的數學模型為

設網絡的輸入層、隱層和鏈接層、輸出層的節點數分別為q、n、n和m,則連接權w(l1)為n×n矩陣,w(l2)為n×q矩陣,w(l3)為m×n矩陣,f(x)取sigmoid函數,即
1.2 稀疏存儲Elman網絡
Elman網絡作為一個局部循環網絡,隱層和鏈接層需要較多的神經元和較長的訓練時間。Elman神經網絡鏈接層存儲的信息反映了全部的歷史信息,未對存儲的信息進行篩選利用,一般僅能實現對給定函數的逼近,因此網絡泛化能力不足。
為提高網絡的泛化能力和快速性,結合小腦對外部信號具有不假思索迅速聯想的特點,在標準Elman網絡的隱層和鏈接層之間引入具有迅速聯想功能的查表方式,網絡結構如圖2所示。以隱層信息作為激勵信息,利用小腦工作原理的迅速聯想功能找尋到和輸入狀態相關的歷史控制信息并反饋給隱層神經元,經過輸出計算提高控制器的動態響應性能。在此過程中只有少量的連接權值需要進行調整,是一種稀疏連接方式,相比全局逼近網絡具有學習速度快的優點,更適合于復雜動態環境下非線性實時控制[9-10]。
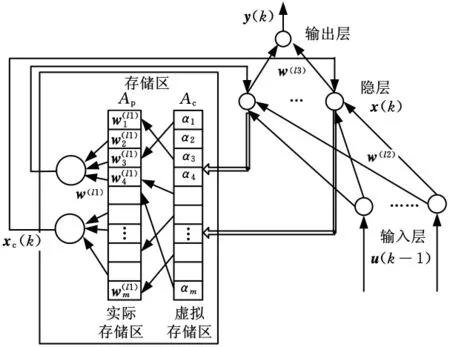
圖2 稀疏存儲Elman神經網絡結構圖
隱層和鏈接層之間的稀疏連接主要通過概念映射和物理映射兩個階段來實現。
(1)概念映射。概念映射是從隱層神經元到虛擬存儲器Ac的映射,映射原則為:在輸入空間相近的兩個點,在Ac中有部分的重疊單元被激勵,距離越近,重疊越多,距離越遠,重疊越少,這種映射稱為局部泛化,泛化能力提高了神經網絡對未知模式的逼近或分類能力。圖2中,α=(α1,α2,…,αm)T是m維相聯空間Ac中的向量,αi只取1或0兩個值。對于確定的x(k),只有其中少數元素為1,大部分元素為0,其中值為1的元素的個數c為泛化參數。
(2)物理映射。物理映射是由虛擬存儲器Ac中的c個單元,用稀疏編碼技術映射到實際物理存儲器Ap的c個單元,c個單元存放著相應權值。
稀疏存儲是一種對學習數據出現的次序不敏感的非線性逼近器,因此可以把n維輸入的概念映射降階為n個一維輸入,同時把c×n權值矩陣w(l1)降階為n個c×1稀疏連接矩陣,則具有稀疏存儲功能的Elman神經網絡的數學模型為
1.3 權值調整
稀疏存儲Elman神經網絡的學習過程根據網絡期望輸出與實際輸出的誤差em來更新各層權值。學習算法采用動態BP算法,對w(l3)和w(l2)有:

稀疏存儲Elman網絡中,隱層的每個神經元都對鏈接層中的c個權值進行如下的調整:

式中,η1、η2、η3分別為鏈接層、輸入層和輸出層的學習速率;β為動量因子。
2 稀疏存儲Elman神經網絡直線伺服系統設計
2.1 矢量控制PMLSM直線伺服系統設計
直線伺服系統的任務是控制和調節直線電動機的位置、速度和推力,采用矢量控制,令電流Id=0,電磁推力就隨著電流Iq的變化而變化,在控制系統中只要控制Iq大小就能控制推力和速度。對于PMLSM,次級磁通位置與次級的機械位置相同,這樣就可以通過光柵尺等檢測設備得到次級的機械位置和磁通位置。圖3為PMLSM的矢量控制原理圖,速度環采用本文所設計的稀疏存儲Elman神經網絡進行控制。

圖3 PMLSM矢量控制原理框圖
2.2 稀疏存儲Elman神經網絡速度控制器設計
在本項目設計的直線伺服控制系統中,使用科爾摩根公司型號為IC22-050A2P1的永磁直線同步電動機,其峰值推力為1250N,額定推力為548N,推力系數為63.0N/A,電氣時間常數為10.1ms,電阻為1.3Ω,電感為0.0134H,反電勢常數為51.4V/(m·s-1),動子質量為6.9kg,極距τ=0.032m,根據PMLSM數學模型可以推導其傳遞函數為
稀疏存儲Elman神經網絡速度控制器的輸入為u(k-1)=(e(k),e(k-1),e(k-2)),其中e(k)、e(k-1)、e(k-2)分別為k、k-1、k-2時刻的速度偏差。
對隱層神經元進行概念映射方法如下:隱層空間x在區間[Xmin,Xmax]上分成N+2C個量化間隔,即

實際映射的方法為

控制的最終目的是使控制對象更好地跟蹤給定信號,因此以速度偏差值作為網絡的辨識誤差來訓練網絡,使網絡調整向減小誤差的方向進行。因此取辨識指標為

稀疏存儲Elman神經網絡速度控制器的具體參數為:輸入層節點數為3,隱層節點數為10,鏈接層物理存儲空間節點數為100,輸出層節點數為1,Xmin=0,Xmax=1,N =100,c=5,η1=η2=η3=0.02,β=0.4。
3 仿真研究
根據上述分析,在MATLAB軟件中建立了直線伺服系統仿真模型,首先驗證了速度控制器的動態跟蹤能力,圖4和圖5所示分別為跟蹤正弦速度指令和梯形重復運動速度指令的仿真結果。從圖中可以看出,稀疏存儲神經網絡速度控制器能使直線進給系統具有良好的跟蹤能力。圖6和圖7分別為在直線電動機平穩運行中受到正弦干擾(FL=(50sin5t+50)N)和突加外力(FL=150N)時的速度響應曲線,從結果可以看出,改進后的Elman網絡速度控制器具有良好的抗干擾能力,特別是對具有周期特性的正弦干擾具有明顯的抑制效果。
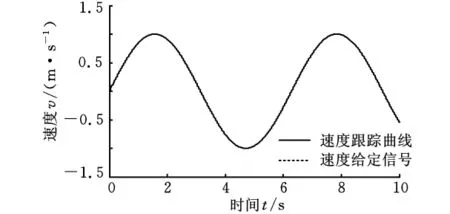
圖4 正弦速度信號跟蹤曲線
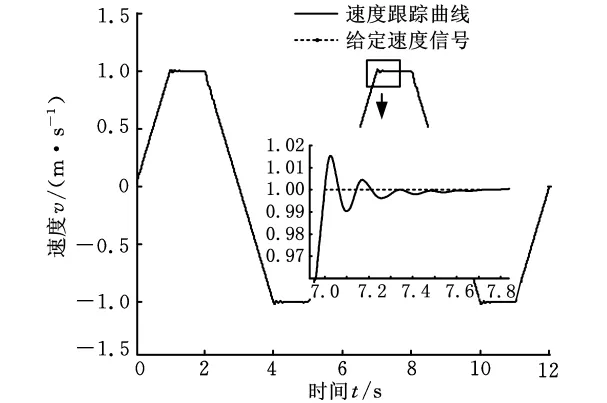
圖5 重復運動速度跟蹤曲線
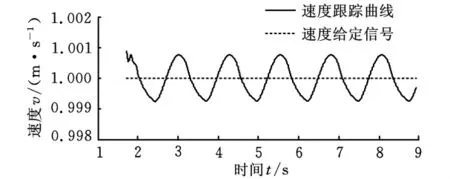
圖6 正弦力干擾下的速度跟蹤曲線
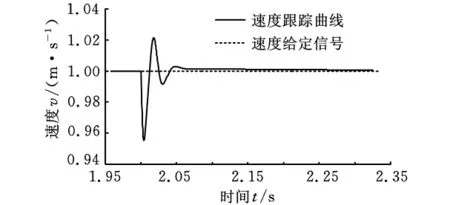
圖7 突加負載情況下的速度跟蹤曲線
4 結束語
為滿足數控機床直線進給系統高速高精的要求,本文在Elman神經網絡隱層與鏈接層之間引入迅速聯想的查表方式,對網絡控制信息進行分類存儲,提高了網絡的學習速度和泛化能力,使改進后的稀疏存儲Elman神經網絡具有局部逼近的快速性和反饋神經網絡的動態性能,同時使控制器計算量和存儲空間減少,實現計算的快速性。在數控機床直線伺服系統上的仿真結果驗證了稀疏存儲Elman神經網絡直線伺服控制器有良好的跟蹤性能和抗干擾能力。
[1]王國彪,賴一楠,范大鵬,等.新型精密傳動機構設計與制造綜述[J].中國機械工程,2010,21(16):1891-1897.
[2]郭慶鼎,趙希梅.數控機床直線伺服驅動控制的若干問題與展望[J].沈陽工業大學學報,2006,28(3):273-277.
[3]Lin Faa-Jeng,Wai Rong-Jong,Chou Wen-Der,et al.Adaptive Backstepping Control Using Recurrent Neural Network for Linear Induction Motor Drive[J].IEEE Transactions on Industrial Electronics,2002,49(1):134-146.
[4]Yildirim S.Design of Adaptive Robot Control System Using Recurrent Neural Network[J].Journal of Intelligent and Robotic Systems,2005,44(3):247-261.
[5]侯忠生,許建新.數據驅動控制理論及方法的回顧和展望[J].自動化學報,2009,35(6):650-667.
[6]Zuo Jianmin,Pan Chao,Wang Mulan,et al.Elman Dynamic Neural Network Control for Direct-Drive Feed System in Advanced CNC Machine Tools[C]//2010International Conference on Computer,Mechatronics,Control and Electronic Engineering.Changchun,2010:307-310.
[7]潘超,左健民,汪木蘭.基于前饋及反饋補償的高性能直線伺服系統[J].系統仿真學報,2010,22(12):3025-3029.
[8]遲軍,陳廉清,楊超珍.基于小波包分析和Elman網絡切削表面粗糙度預測方法[J].中國機械工程,2010,21(7):822-826.
[9]Peng Ya-Fu,Lin Chih-Min.Adaptive Recurrent Cerebellar Model Articulation Controller for Linear Ultrasonic Motor with Optimal Learning Rates[J].Neurocomputing,2007,70(16/18):2626-2637.
[10]汪木蘭.神經網絡硬化實現的共性技術在電力傳動中應用研究[D].合肥:合肥工業大學,2010.