三維激光掃描儀分辨率的測試方法
2012-09-19 13:24:30劉桂昌
自動化儀表 2012年10期
陳 濤 劉桂昌 張 倩 魏 朗
(長安大學汽車學院交通部汽車運輸安全保障技術重點實驗室,陜西 西安 710064)
0 引言
目前,便攜式三維掃描儀的應用非常廣泛,主要用于逆向工程、實物拍攝、創建產品的三維模型和有限元分析的數據捕捉等。這些領域對三維掃描儀的數據精度和分辨率精度都有很高的要求,因此,在選用掃描儀時必須確認其精度和分辨率,才能獲得滿意的三維數據模型[1]。
隨著掃描儀技術的日趨成熟,尚缺少與便攜式激光掃描儀分辨率指標相關的國際或國家標準出臺。國內外對分辨率的研究主要傾向于對分辨率影響因素的研究。如通過對比不同種類掃描儀測試結果來分辨掃描儀分辨率優劣[2],分析掃描儀掃描距離和角度對掃描儀分辨率的影響[3-4],以及利用計算公式來計算一定面積上點云的密度與掃描儀分辨率間的關系[5]。但通過研究掃描儀分辨率的影響因素,仍不能給出一個簡單、直觀、可操作的儀器使用判別方法。本文在進行大量試驗的基礎上,借助科學的統計方法,給出了一種可行的方案。
1 測試方法
1.1 三維掃描儀的結構原理
便攜式的激光掃描儀掃描系統主要由掃描儀、控制器和電源供應系統三部分組成。激光掃描儀本身主要包括激光測距系統和激光掃描系統,同時,也集成了CCD以及儀器內部控制和校正等系統[6]。
三維激光掃描儀所采用的最基本的方法有飛行時間法(time of flying,ToF)和三角測量法。飛行時間法利用激光發射到接收之間的時間延遲來計算距離。但由于光波的飛行速度達3×108m/s,為達到較高的距離測量精度,對于定時系統的時間分辨率有特別高的要求,較難在技術上得到實現。三角測量法則以傳統的三角測量為基礎。由于三維面型對結構照明光束產生的空間調制改變了成像光束的角度,即改變了成像光點在接收裝置陣列上的位置,因此通過對成像光點位置以及系統光路的幾何參數的確定,可最終計算出掃描對象與激光發射器的距離[7]。因此,近年來激光三維技術的發展主要在于三角測量法的更新。
單獨的三角測量方式要求投影光軸和成像光軸之間保持恒定的夾角,且必須附加一維或二維的相對掃描來獲取目標點的三維數據。Handyscan EXAscan等掃描儀大多采用雙三角測量方式來解決單三角測量系統帶來的弊端。
三維掃描儀的原理圖如圖1所示[8-10]。利用三角形邊與角的特定關系,可以計算出目標點的三維坐標。
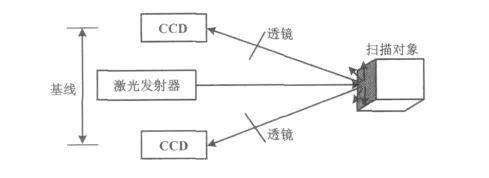
圖1 三維掃描儀的原理圖Fig.1 Principle of the 3D scanner
1.2 測試技巧
分辨率是一個籠統的概念,泛指測量或顯示系統對目標物細節的分辨能力,較高的分辨率可以更好地體現目標物的細節。
在不同的領域,分辨率的標準也不同。通常情況下,分辨率指每英寸(1英寸=25.4mm)上可產生的點數或像素點數,即每英寸點(dots per inch,DPI)。對于光學設備,特別是三維掃描儀設備,分辨率就是對細節分辨能力的一種度量,即掃描儀能夠區分的最小特征參數,也是描述點云中目標細微程度的指標[5]。
與平面輸入輸出設備的數據不同,三維掃描的數據屬于矢量化的數據,盡管文獻[5]中提出使用點云密度的方法來衡量分辨率,但實際操作起來還是具有一定的難度。在此,取相鄰點與點之間的空間距離作為掃描儀的分辨率的指標。
鑒定掃描儀分辨率的最重要的工作就是數據的處理工作。當三維掃描儀工作時,CCD攝像頭拾取掃描對象的過程即拍照的過程。依據其工作原理,在選取樣本時,通常要考慮選取點云分布近似經緯方向的最近的兩點之間的空間距離,而對于對角方向的距離則不予考慮。由于點云的數據量龐大,無法逐一檢查,因此通常采用隨機抽樣的方式。
手持式三維激光掃描儀的分辨率的鑒定流程如下。
①連接掃描儀至計算機,做好掃描的前期工作。
②獲取測試數據。分辨率等級受制于容積框的大小,一定的容積框大小又有三個分辨率級別可選,由低到高依次是L、M、H三個等級。在此基礎上,還有高倍鏡模式(如L+、M+、H+),就是在原有的掃描模式下將分辨率水平提高4倍。將容積框的大小設定為最小(最小只能到100 mm),在分辨率級別最高的情況下,名義最高分辨率可達0.20 mm,開高倍鏡則最高分辨率可達0.05 mm。
③ 導入掃描數據至Geomagic Qualify,獲取樣本。對于大數量的母體,要估計母體置信區間,通常選取大子樣作為樣本。根據實際經驗,一般認為n≥45的子樣是大子樣。
④建立分析模型,處理樣本數據。
⑤根據分析結果生成分辨率數據模型,判定分辨率水平。
2 測試試驗
加拿大Creaform公司生產的Handyscan EXAscan高精度系列掃描儀是一種高精度的手持式自定位三維激光掃描儀。它在兩個普通的CCD鏡頭的基礎上又增加了一個CCD鏡頭,使掃描儀的最大分辨率在原來的基礎上增加了4倍,這極大地豐富了被掃描對象的細節。
Handyscan 3D掃描儀采用的是自定位模式。在掃描過程中,掃描儀會實時捕捉目標點,進而計算和記錄其各自相對于掃描儀的位置。這些目標點會對掃描物體進行定位,定位后即可通過Handyscan 3D掃描儀采集物體表面的三維尺寸數據。
Handyscan 3D掃描儀的定位原理是利用不在同一直線上的四個點來確定一個三維坐標系,這樣在掃描前或掃描過程中,掃描儀只要能同時捕捉到合適的四個點,就能確定這四個點所組成的坐標系區域采樣點的坐標值。而所有的定位點又互有聯系,故所有的小坐標系就可以統一成一個擁有共同坐標系的空間,采樣點的坐標也會隨之轉化為公共坐標的坐標值。因此,采集信息之前需要對目標進行貼點標記。這種掃描特性的優點在于被掃描物體可以是運動的、空間位置是自由的。
測試Handyscan掃描儀的分辨率等級,必要時需要開啟第三個CCD鏡頭,這對于計算機硬件配置有很高的要求。本次試驗使用的是HP Z800圖形工作站。工作站的主要配置為:2個英特爾至強四核處理器X5570、12 GB內存(DDR3-1333 MHE ECC)和3D NVIDIA Quadro FX5800專業顯卡。
掃描儀的掃描對象是標準塊。打開VXSCAN掃描軟件(儀器自帶驅動程序)設定面細節。設定內容包括設定容積框的大小和分辨率的級別。掃描試驗獲取的樣本數據涵蓋了容積框邊長分別為100 mm、300 mm、500 mm、700 mm、900 mm、1 000 mm 在 L、M、H和H+四種等級模式下的掃描數據。
3 結果分析
Geomagic Qualify通過德國標準計量機構PTB(Physikalisch-Technische Bundesanstalt)認證,可以迅速檢測產品的計算機輔助設計(CAD)模型和制造的產品之間的差異。憑借Geomagic Qualify提供的高級分析功能,可快速判斷出掃描儀的分辨率狀況,為處理掃描數據提供理想的工作平臺。
影響掃描精度的因素有很多,影響分辨率的因素也同樣很多,包括被掃描物的反光、掃描距離、溫度及對象顏色等[2,11-12]。
為減少外界干擾因素對測試結果的影響,應盡量在點云分布較均勻的部位選取樣本。同時,為了區分對平面和曲面細節的提取能力,分別對樣本進行選取;樣本容量維持45。
樣本數據均值匯總表如表1所示,分辨率等級包含低(L)、中(M)、高(H)和高等級開啟高倍鏡(H+)這四個等級。
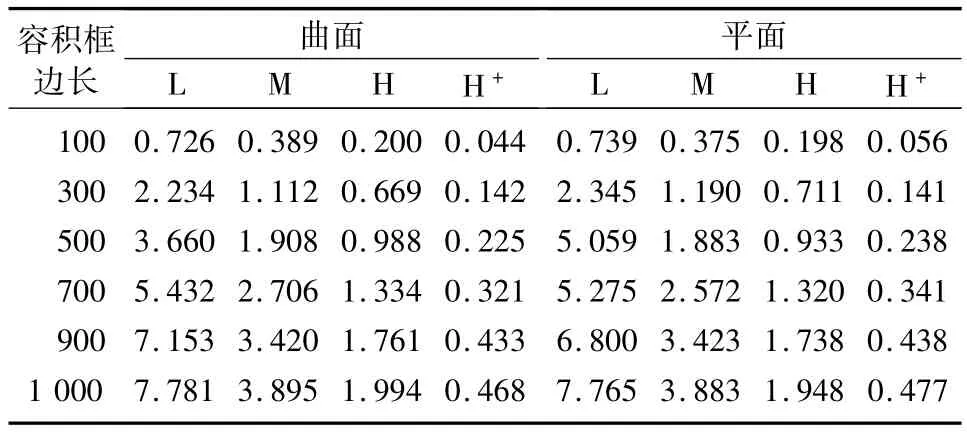
表1 樣本數據均值匯總表Tab.1 Summary of the means of sample data mm
3.1 數據分析模型建立
建立如表2所示的雙因素重復試驗方差分析模型,分析不同分辨率等級、容積框邊長及平面和曲面對掃描數據分辨率是否有顯著影響。
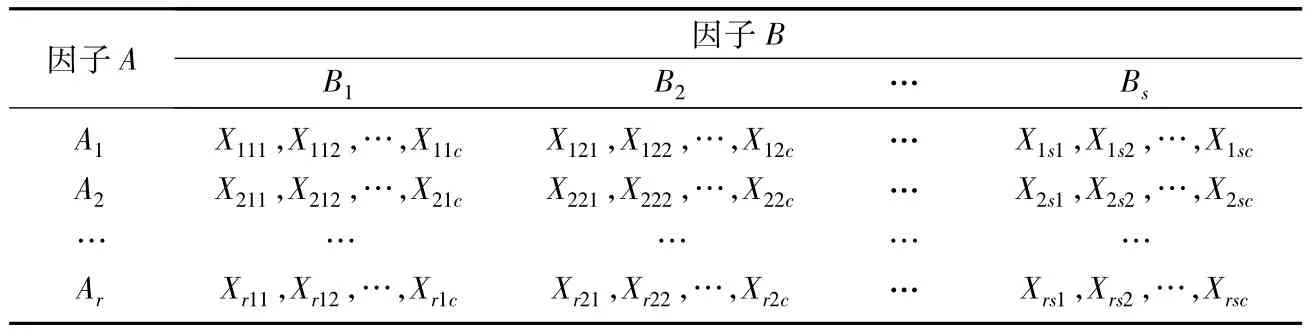
表2 雙因素重復試驗方差分析表Tab.2 Two-factor repeated tests ANOVA
根據雙因素重復試驗方差分析模型,可得出以下假設。
① 假設 H01:α1=α2=… =αr=0(αi稱為因子 A在水平Ai的效應)。
② 假設H02:β1=β2=… =βs=0(βj稱為因子 B 在水平Bj的效應)。
③ 假設 H03:γij=0,i=1,2,…,r;j=1,2,…,s(γij稱為因子A、B在組合水平Ai×Bj的交互影響)。
若假設成立,則表明因子A和B或A和B的交互作用對試驗結果無顯著影響;否則,因子對試驗結果有顯著影響。
重復試驗二元方差分析的F分布公式如下:
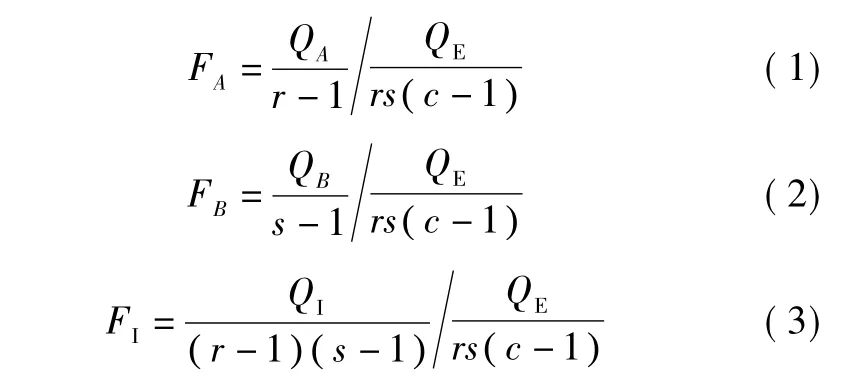
式中:QA為因子A引起的離差平方和;QB為因子B引起的離差平方和;QI為因子A、B交互作用引起的離差平方和;QE為誤差;r、s、c為常數。式(1)服從自由度為的F分布;式(2)服從自由度為的F分布;式(3)服從自由度為的F分布。一旦給定置信度水平α,查表即可得F分布的值。若,即拒絕H01,認為因子A對試驗結果有顯著影響;否則,接受H01,認為因子A對試驗結果無顯著影響。同理,若,即拒絕H02,否則接受 H02;若,即拒絕H03,否則接受 H03。
3.2 數據分析
根據所建立的方差分析模型,其所涉及的三個因子包括掃描部位、容積框大小、分辨率等級。理論上,要分析這三個因子對分辨率的影響(包括單個或交互影響),應該進行三次組合,即控制一個因子,研究另外兩個因子。
設定顯著性水平α為5%,控制分辨率等級,并先將其設定為L等級,因子A表示不同的掃描部位,即平面和曲面兩種;因子B設定為在L等級下容積框的邊長,為100 mm、300 mm、500 mm、700 mm、900 mm、1 000 mm。根據建立的模型,可以計算出因子A的F分布FA=40.174 3和因子B的F分布FB=8 669.787 7,兩因子交互作用的F 分布FI=112.803 6,查 F 分布表得到 FA>F0.05(1 528)=3.84,FB>F0.05(5 528)=2.21,FI> F0.05(5 528)。故可認定在L等級下,不同掃描部位、設定不同容積框邊長對分辨率的影響是顯著的。同理,可得其他三個分辨率等級F值,結果如表3所示。只有在M等級時掃描部位對分辨率影響不顯著,除此之外影響皆顯著。

表3 各分辨率等級下F值匯總表Tab.3 Summary of F-value at various resolution levels
對于類似可再設定容積框邊長討論掃描部位和分辨率等級對分辨率的影響,以及設定分辨率等級討論容積框邊長和掃描部位對分辨率的影響。為方便統計,建議使用SPSS等統計軟件。
由以上分析可知,影響分辨率有三個內部因素:掃描部位、設定的容積框邊長和設定的分辨率等級,且都對分辨率影響顯著。
3.3 分辨率模型建立
分辨率線性模型表達式為:

式中:D為實際分辨率大小,mm;L為設定的容積框邊長,mm。
試驗數據的分析結果表明,掃描不同部位對分辨率的影響是顯著的。
為了對分辨率有一個更直觀的了解,在這里采用加權平均法,即根據被掃描對象的特征估算曲面部位與平面部位所占的比例給予不同的權值。以加權后的結果擬合,既大大簡化模型、提高效率,又具有一定的可信度。標準塊表面曲面處約占總面積的20%、平面處約占80%,故可取加權值分別為0.2和0.8。擬合結果如表4所示。
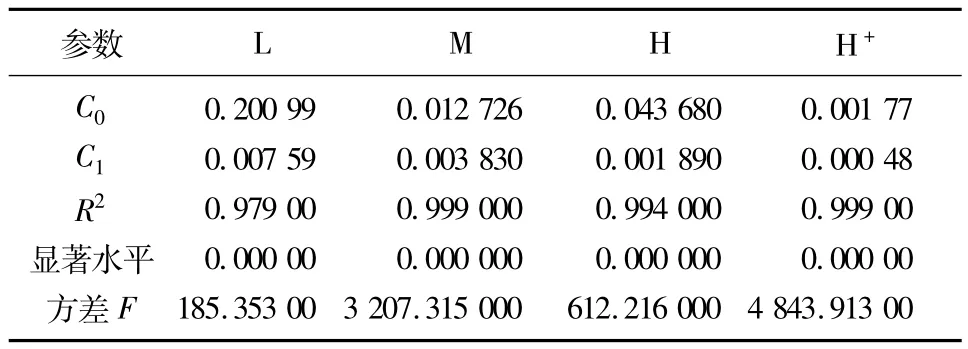
表4 擬合參數匯總表Tab.4 Summary of the fitting parameters
由表4可知,該數據模型的擬合度均超過0.979,F值的顯著水平也都接近于0,回歸方程具有統計學意義。
4 結束語
試驗統計獲得三維激光掃描儀Handyscan EXAscan的分辨率模型與廠家標定的名義分辨率基本吻合:最高測試分辨率為0.049 7 mm,名義最高分辨率為0.05 mm;分辨率與掃描范圍間呈線性關系。此外,從實用角度看,H+級分辨率(最高)掃描時對計算機配置要求較高,難以實現便攜的要求。
通過掃描標準塊、獲取點云模型數據后,應用Geomagic Qualify軟件處理、分析并建立模型,以判別三維掃描儀的分辨率水平,是一種切實可行的分辨率測試方法。該方法對于了解、認證掃描儀的分辨率具有重要的指導意義。
[1]林家明,楊隆榮.CCD攝像機技術的發展趨勢及應用前景[J].光學技術,1999,11(6):43 -47.
[2]Boehler W,Marbs A.Investigating laser scanner accuracy[R].CIPA Symposium,Turkey,October 2003.
[3]Ahokas E,Yu Xiaowei,Oksanen J,et al.Optimization of the scanning angle for countrywide laser scanning[C]//ISPRS WGⅢ/3,Ⅲ/4,Ⅴ/3 Workshop“Laser scanning 2005”,Enschede,the Netherlands,2005.
[4]楊偉,劉春,劉大杰.激光掃描數據三維坐標轉換的精度分析[J].工程勘察,2004(3):61 -63.
[5]朱凌,石若明.地面三維激光掃描點云分辨率研究[J].遙感學報,2008,5(3):405 -410.
[6]徐進軍,余明輝,鄭炎兵.地面三維激光掃描儀應用綜述[J].工程勘察,2008(12):31 -34.
[7]Lichti D,Harvey B.The effects of reflecting surface material properties on time-of-flight laser scanner measurements[C]∥Symposium on Geospatial Theory,Processing and Applications,Ottawa,2002.
[8]蘇顯渝,李繼陶.信息光學[M].北京:科學出版社,2002:306 -316.
[9]杜立彬,高曉輝,夏進軍,等.一種新型激光三維掃描測量儀的研制[J].激光技術,2005,8(4):366 -369.
[10]唐朝偉,梁錫昌,鄒昌平.三維曲面激光精密測量技術[J].計量學報,1994,4(2):99 -103.
[11]Li W X,Mitchell L D.Laser scanning system testing:errors and improvements[J].Measurement,1995,16(2):91 -101.
[12]王學軍,劉平方.三維曲面激光快速自動測量系統[J].激光雜志,1998(2):46 -50。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
媽媽寶寶(2017年3期)2017-02-21 01:22:28
光學精密工程(2016年6期)2016-11-07 09:07:19
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
核科學與工程(2015年4期)2015-09-26 11:59:03
