矩陣式變換器PMSM直接轉矩控制系統
2012-10-16 03:56:20孫少偉郭興眾陸華才
河北工程大學學報(自然科學版) 2012年4期
孫少偉,郭興眾,陸華才
(安徽工程大學安徽檢測技術與自動化裝置重點實驗室,安徽蕪湖241000)
傳統的交-直-交變換器由于存在中間儲能環節,因而動態響應較慢,輸入電流中含有大量的諧波,容易造成對電網的污染,同時也難以實現能量的雙向流動等缺點。交-交矩陣式變換器(Matrix Converter,MC)體積小、自身結構簡單,具有能量雙向流通、輸出電流正弦性良好、輸入功率因數可控等特點。永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)以其高效率、高轉矩慣量比、高功率密度和低維護費用等特點,使其在現代交流調速系統中成為了異步電機強有力的競爭對手[1]。國內外許多學者提出了很多關于矩陣式變換器供電的IM的直接轉矩控制(Direct Torque Control,DTC)的控制策略[2-3],但把 MC 與永磁同步電動機DTC相結合的應用研究則相對較少。
本文在矩陣式變換器的空間矢量調制算法的基礎上,結合PMSM的定子磁場定向直接轉矩控制原理,提出一種將二者優點相結合的組合控制策略。并運用Matlab/Simulink仿真工具箱對系統模型進行了仿真試驗。
1 矩陣式變換器的輸出電壓矢量
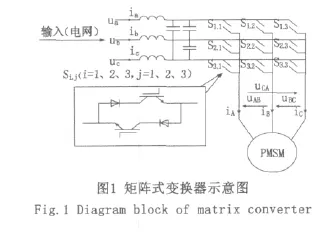
三相交-交型矩陣式變換器的電路拓撲結構和雙向開關的組成方式如圖1所示,它允許任意輸入相到任意輸出相的鏈接。實現三相交-交型矩陣式變換器的主回路由9個雙向開關(S1.1~S3.3)組成,每個雙向開關都具有雙向通斷能力,以此實現能量的雙向流動,可由2個快速恢復二極管器件和2個 IGBT構成[4]。線路中的 LC濾波器,一方面是為了交流開關的換向,使負載感性電流可以在各項之間切換;另一方面是為了減少濾波線路電流的諧波。
矩陣式變換器的換流控制必須嚴格遵循兩個基本原則:一是三相輸入側任意兩相電路沒有短路;二是輸出側任意一相電路沒有斷路。因為這兩個基本原則的限制,所以在矩陣式變換器一共允許的27種可能的開關組合中,DTC只可以使用其中的21種(見表1)。其中|u0|和α0分別為對應開關組合的輸出電壓矢量在定子靜止坐標系中幅值和輻角;表1中前18種開關組合(分別命名為 +1,-1,+2,-2,…,+9,-9,)均為有兩輸出相同時連接到同一輸入相上,稱為運動矢量。表1中后3種開關組合均實現了輸出三相的短路,輸出電壓和輸入電流均為零,稱為零矢量[4]。

表1 DTC中使用的開關組合Tab.1 The switching state used by DTC
2 基于矩陣式變換器的DTC的策略
2.1 轉矩和磁鏈的控制原理
[4] 得出PMSM直接轉矩控制的最終表達式

由式(1)可知,PMSM的輸出轉矩與定子磁鏈、轉子磁鏈幅值及轉矩角 δ的正弦成正比。PMSM轉子磁鏈幅值一般為恒值,可以通過改變轉矩角的大小來改變電動機轉矩大小,這就是PMSM直接轉矩控制理論基礎。
DTC對轉矩和磁鏈的控制是通過滯環比較器來實現的,利用轉矩滯環比較器、磁鏈滯環比較器及定子磁鏈所處的位置選出一個最佳電壓矢量作用于永磁同步電機,以此實現對轉矩和定子磁鏈的雙閉環控制。
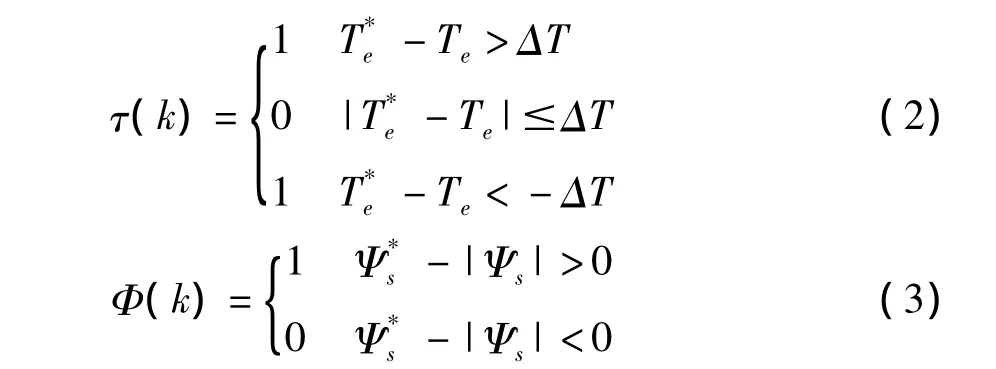
轉矩滯環比較器和定子磁鏈滯環比較器的輸出量τ,Φ的函數定義如下:
矩陣式變換器用于DTC的開關狀態共有21種,由此可見,矩陣式變換器可比傳統三相交-直交型逆變器輸出更多的電壓矢量,即矩陣式變換器驅動永磁同步電機DTC系統還可以控制除轉矩和定子磁鏈的另一個變量。文獻[5] 中將輸入電壓矢量和輸入電流矢量夾角φi的正弦量的平均值作為第3個控制變量。其中,轉矩、定子磁鏈和sinφi的控制器均通過滯環比較器來實現,通過查表的方式來選擇一組最佳的電壓矢量作用于永磁同步電機,從而達到同時控制3個變量的目的。
為實現轉矩和磁鏈對矩陣式變換器電壓矢量的最優控制,通常遵循的原則是:在每個輸入電壓扇區中,把矩陣式變換器輸出電壓矢量按照對轉矩和磁鏈的控制效果相同等效為兩電平逆變器DTC中電壓矢量作為選擇原則控制轉矩和磁鏈。當有多個電壓矢量均能滿足轉矩和磁鏈的控制要求時,則還要根據功率因數控制的要求決定。
2.2 最優開關組合及系統結構
矩陣變換器最優開關矢量表見表2。表2中第一列為DTC中保持定子磁鏈與轉矩在滯環比較器容差范圍內時所選擇的電壓矢量;第一行為電網側輸入電壓所處位置的扇區號;cφ為功率因數控制滯環比較器的輸出值,以現實電網的單位功率輸入。通過對3個變量的控制,來選擇一個最優電壓矢量作用于永磁同步電機。當需要一個零矢量輸出時,則根據功率開關次數最少的原則,輸出一個0 矢量[6]。
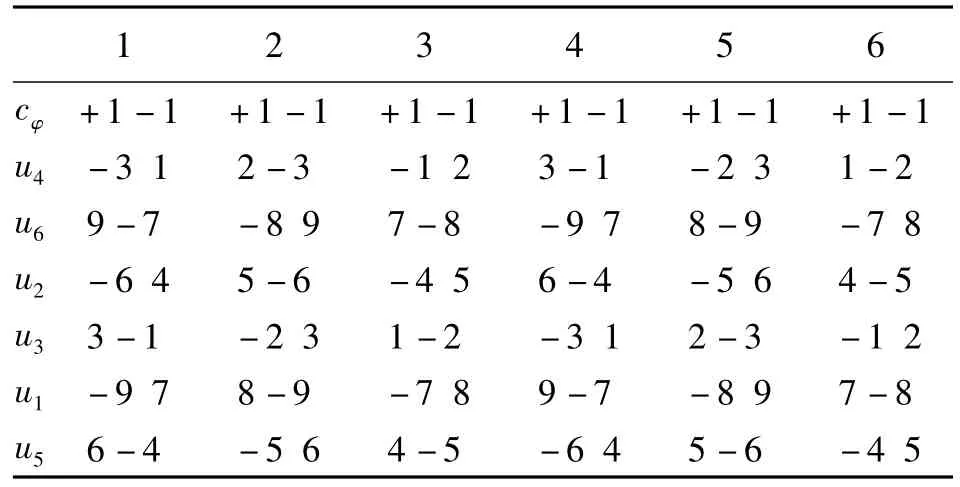
表2 矩陣式變換器最優開關矢量表Tab.2 Matrix converter optimal switch vector
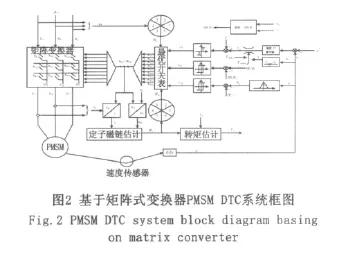
根據前面轉矩、磁鏈及功率因數控制原理的分析,本文提出一種將矩陣式變換器和永磁同步電機直接轉矩控制相結合的系統,構成磁鏈、轉矩和功率因數的閉環控制,其系統框圖如圖2所示。
3 系統仿真
為了驗證采用基于矩陣式變換器的永磁同步電機直接轉矩控制系統的性能,利用Matlab/Simulink仿真工具箱對系統模型進行仿真實驗。選擇永磁同步電機參數如下:極對數p=2,額定電壓U=220 V,頻率 f=50 Hz,直軸電感 Ld=0.008 5 H,交軸電感 Lq=0.006 5 H,等效勵磁磁鏈 ψf=0.175Wb,定子電阻 Rs=0.57 Ω,轉動慣量為0.001 1 kg·m2,所加負載轉矩 T0=10 N.m。摩擦系數為0。系統給定值為:定子磁鏈幅值為0.6 Wb,直流電壓為300 V;sinφi給定值為0(電網側單位功率因數運行)。
對本文所提出的系統模型進行以下兩種情況仿真:
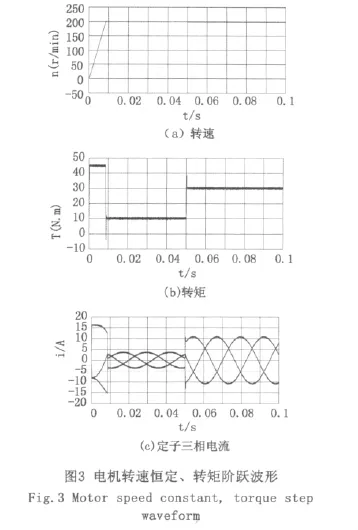
1)給定轉速恒定為200 r/min,初始給定轉矩為10 N·m,電機運行0.05 s后,將轉矩負載突加到30 N·m,其仿真結果如圖3所示。從中可以看出給定轉速恒定不變,讓電機的轉矩增加到30 N·m,對轉速的影響很小,定子電流和電磁轉矩相應的增大,而后電流依然保持正弦穩定。
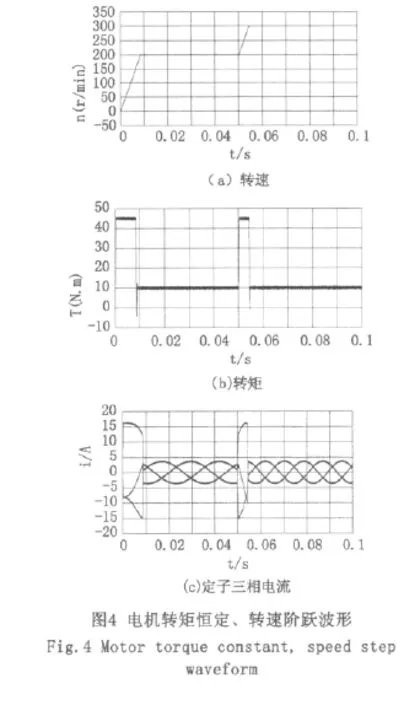
2)給定轉矩恒定為10 N·m,初始給定轉速為200 r/min,電機運行0.05 s后,將轉速突加到300 r/min,其仿真結果如圖4所示。從中可以看出轉矩恒定為10 N·m,轉速突加到300 r/min,轉速反應迅速,定子電流和電磁轉矩在經過小幅震蕩后依然能保持給定,具有很好的魯棒性。
4 結論
永磁同步電機在參數變化時,系統具有很好的魯棒性,轉速和轉矩動態響應良好,并且三相輸入電流具有很好的正弦性。由于該系統具有結構簡單,算法易于數字實現,魯棒性強、良好的傳動和動態性能等特點,因此具有很好的工程應用前景和理論研究價值。
參考文獻:
[1] 李永東,朱昊.永磁同步電機無速度傳感器控制綜述[J] .電氣傳動,2009,39(9):3 -10.
[2] KYO BEUM LEE,FREDE BLAABJERG.Sensorless DTC-SVM for induction motor driven by a matrix converter using a parameter estimation strategy [J] .IEEE Trans on Industry Electronics,2008,55(2):512-521.
[3] XIAO D,RAHMAN M F.A modified direct torque control for a matrix converter-fed interior permanent magnet synchronous machine drive[C] .IEEE PESC,2006:1-7.
[4] 任海濤,劉賢興,仲崇毅.矩陣變換器-永磁同步電動機直接轉矩控制系統研究[J] .微特電機,2009(1):39-41.
[5] CASADEI D,GIOVANNI S.The use of matrix converter in direct torque control of induction machines[J] .IEEE Trans on Industry Electronics,2001,48(6):1057-1064.
[6] 周揚忠,鐘天云.矩陣變換器供電同步電動機直接轉矩控制研究[J] .電氣傳動,2008,38(10):3-8.
