汽車電磁閥式半主動(dòng)懸架控制系統(tǒng)設(shè)計(jì)
2012-10-25 05:31:34唐希雯王洪成孫保群
夏 光, 唐希雯, 王洪成, 孫保群
(1.合肥工業(yè)大學(xué) 機(jī)械與汽車工程學(xué)院,安徽 合肥 230009;2.合肥工業(yè)大學(xué) 汽車工程技術(shù)研究院,安徽 合肥 230009;3.電子工程學(xué)院 信息系,安徽 合肥 230037)
0 引 言
電磁閥式減振器是一種通過先導(dǎo)式比例電磁閥改變節(jié)流孔開度來實(shí)現(xiàn)連續(xù)阻尼調(diào)節(jié)的新型可變阻尼減振器,具有結(jié)構(gòu)簡(jiǎn)單、響應(yīng)迅速、性能可靠和易于工程實(shí)現(xiàn)的特點(diǎn),且能取得與主動(dòng)懸架相近的控制效果,從而成為目前實(shí)用化可變阻尼減振器的的發(fā)展方向[1-3]。
關(guān)于連續(xù)阻尼可調(diào)半主動(dòng)懸架的控制方法很多,控制算法也越來越復(fù)雜[4-7],但是這些控制算法的實(shí)際可操作性越來越差,同時(shí)也帶來了復(fù)雜算法的響應(yīng)時(shí)滯。
1 電磁閥式減振器結(jié)構(gòu)與工作原理
本文針對(duì)電磁閥式阻尼連續(xù)可調(diào)半主動(dòng)懸架進(jìn)行了控制系統(tǒng)的硬件電路和軟件系統(tǒng)設(shè)計(jì),采用工程易于實(shí)現(xiàn)且魯棒性較強(qiáng)的skyhook控制策略,并將自主開發(fā)的控制系統(tǒng)裝車進(jìn)行了實(shí)車道路試驗(yàn)。
電磁閥式減振器可在普通雙筒式減振器基礎(chǔ)上改進(jìn)而來,相比于普通雙筒式減振器,其結(jié)構(gòu)上增加了一個(gè)中間缸和一個(gè)電磁閥。中間缸和工作缸上腔相通,電磁閥連接中間缸和儲(chǔ)油缸,電磁閥控制中間缸與儲(chǔ)油缸之間的節(jié)流通道,從而實(shí)現(xiàn)阻尼的連續(xù)可調(diào)[8]。
電磁閥式減振器的工作原理如圖1所示,相比于普通雙筒式減振器,其增加了一個(gè)電磁閥控制的節(jié)流通道,包含和上腔相通的中間缸和電磁閥,通過電磁閥對(duì)節(jié)流通道的開度調(diào)節(jié)來實(shí)現(xiàn)減振器阻尼連續(xù)可調(diào)。

圖1 電磁閥式減振器工作原理圖
電磁閥式減振器工作過程可分為復(fù)原行程和壓縮行程。
1.1 復(fù)原行程
活塞桿相對(duì)工作缸向上運(yùn)動(dòng),上腔體積變小,上腔和中間缸油液壓力增大。
(1)上腔油液通過活塞總成上的閥系流到下腔。
(2)補(bǔ)償腔油液通過底閥總成上的閥系流到下腔。
(3)中間缸的油液通過電磁閥控制的節(jié)流通道流到補(bǔ)償腔。
1.2 壓縮行程
活塞桿相對(duì)工作缸向下運(yùn)動(dòng),下腔體積變小,下腔油液壓力增大。由于流通閥開啟壓力小,僅相當(dāng)于單向閥的作用,故下腔與上腔壓力相差不大。油液流動(dòng)路徑為:
(1)下腔油液通過活塞總成上的閥系流到上腔。
(2)下腔油液通過底閥總成上的閥系流到補(bǔ)償腔。
(3)中間缸的油液通過電磁閥控制的節(jié)流通道流到補(bǔ)償腔。
2 系統(tǒng)硬件電路設(shè)計(jì)與實(shí)現(xiàn)
硬件設(shè)計(jì)主要是電子控制單元的硬件電路設(shè)計(jì),其結(jié)構(gòu)框圖如圖2所示,它表明了電磁閥式半主動(dòng)懸架控制系統(tǒng)的基本電路結(jié)構(gòu)及工作過程。

圖2 控制系統(tǒng)的結(jié)構(gòu)示意圖
系統(tǒng)采用ARM7系列支持實(shí)時(shí)仿真和跟蹤的16/32 位 ARM7TDMI-S CPU 的 微 控 制 器LPC2292作為控制器的核心單元,可提高運(yùn)算速度,特別適用于汽車、工業(yè)控制應(yīng)用[9]。
硬件電路主要包括單片機(jī)和最小系統(tǒng)電路、點(diǎn)火系統(tǒng)供電電路、車身和車輪垂直加速度信號(hào)調(diào)理電路、車速信號(hào)調(diào)理電路、電磁閥驅(qū)動(dòng)電路、CAN通信電路和故障診斷通信電路。
3 系統(tǒng)軟件設(shè)計(jì)
3.1 系統(tǒng)控制策略
skyhook阻尼控制策略基本思想可表述為:當(dāng)簧載質(zhì)量的絕對(duì)速度和簧載質(zhì)量與非簧載質(zhì)量的相對(duì)速度一致時(shí),減振器抑制簧載質(zhì)量的運(yùn)動(dòng),并產(chǎn)生與簧載質(zhì)量匹配的阻尼力。考慮到可變阻尼減振器的阻尼調(diào)節(jié)范圍,當(dāng)其不能滿足等于理想阻尼力時(shí),產(chǎn)生最大阻尼力;當(dāng)簧載質(zhì)量的絕對(duì)速度和簧載質(zhì)量與非簧載質(zhì)量的相對(duì)速度反向時(shí),減振器不抑制簧載質(zhì)量的運(yùn)動(dòng),減振器產(chǎn)生的阻尼力盡可能的小。
理想skyhook阻尼控制模型代表一種懸架阻尼控制思想,在實(shí)際中并不能完全實(shí)現(xiàn)[10],可以通過可變阻尼減振器在一定范圍內(nèi)等效實(shí)現(xiàn)skyhook阻尼控制,等效模型如圖3所示。

圖3 等效skyhook阻尼控制模型
圖3中各位移、速度向上為正。簧載質(zhì)量與非簧載質(zhì)量相對(duì)速度記為vbw,定義兩者相互分開方向?yàn)檎嗷ソ咏较驗(yàn)樨?fù)。
等效的skyhook阻尼控制模型為:


其中,F(xiàn)d為可變阻尼減振器產(chǎn)生的阻尼力,F(xiàn)d=40 000N/m;kt=350 000N/m;Cs=1 360N·s/m;Csky=4 000N·s/m;Cdmax為減振器最大阻尼系數(shù),Cdmax=5 440N·s/m;Cdmin為減振器最小阻尼系數(shù),Cdmin=1 360N·s/m。
可變阻尼減振器阻尼系數(shù)Cd可按(3)式計(jì)算:

3.2 仿真分析
假定汽車在B級(jí)路面上以60km/h的車速行駛,路面輸入模型為:

其中,x0(t)為路面不平度位移;f0為下截止頻率,一般取0.062 8;Gq(n0)為路面不平度系數(shù);u為車速;ω(t)為均值為零的高斯白噪聲[11]。在此路面輸入下,等效skyhook阻尼控制模型與被動(dòng)懸架模型的車身垂向加速度對(duì)比如圖4所示。
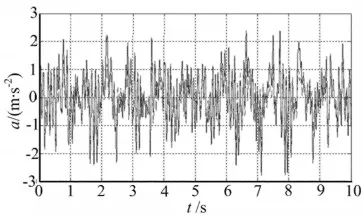
圖4 時(shí)域仿真結(jié)果對(duì)比
圖4中,實(shí)線為被動(dòng)懸架模型的車身垂向加速度時(shí)域曲線,虛線為等效skyhook阻尼控制模型的車身垂向加速度時(shí)域曲線。
以車身垂向加速度均方根值為評(píng)價(jià)指標(biāo),對(duì)比分析B級(jí)路面輸入與E級(jí)路面輸入下skyhook阻尼控制策略的有效性,見表1所列。仿真結(jié)果表明,在B級(jí)路面輸入下,skyhook阻尼控制模型相比于被動(dòng)懸架模型車身垂向加速度均方根值減小了32.3%;在E級(jí)路面輸入下,skyhook阻尼控制模型相比于被動(dòng)懸架模型車身垂向加速度均方根值減小了32.4%。

表1 仿真結(jié)果均方根值對(duì)比
3.3 系統(tǒng)軟件實(shí)現(xiàn)
(1)首先采集車速信號(hào),對(duì)車速信號(hào)進(jìn)行判斷。如果車速大于100km/h,為保證車輛高速行駛穩(wěn)定性,則系統(tǒng)設(shè)置為運(yùn)動(dòng)模式,減振器設(shè)置為大阻尼狀態(tài),即輸出給減振器電磁閥小電流(0.25A);如果車速小于100km/h,進(jìn)入下一步。
(2)根據(jù)車速信號(hào)計(jì)算汽車當(dāng)前加速度值,通過加速度判斷駕駛員當(dāng)前駕駛偏好。如果加速度絕對(duì)值大于5m/s2,表明駕駛員駕駛偏向于運(yùn)動(dòng)性,則系統(tǒng)設(shè)置為運(yùn)動(dòng)模式,減振器設(shè)置為大阻尼狀態(tài),即輸出給減振器電磁閥小電流(0.25A);如果加速度絕對(duì)值小于5m/s2,即當(dāng)前駕駛員偏向于其他模式,進(jìn)入下一步。
(3)對(duì)駕駛員選擇的駕駛模式進(jìn)行檢測(cè)。如果選擇的是舒適模式,則減振器設(shè)置為阻尼狀態(tài),輸出給減振器電磁閥大電流(2A);如果選擇的是運(yùn)動(dòng)模式,則減振器設(shè)置為大阻尼狀態(tài),即輸出給減振器電磁閥小電流(0.25A)。如果選擇的是正常模式,則采集并處理各傳感器信號(hào),然后根據(jù)控制策略計(jì)算出目標(biāo)阻尼力,并根據(jù)目標(biāo)阻尼力計(jì)算應(yīng)當(dāng)輸出的最佳電流。
控制系統(tǒng)主程序流程如圖5所示。

圖5 系統(tǒng)主程序流程圖
4 實(shí)車試驗(yàn)
進(jìn)行試驗(yàn)的目的是為了驗(yàn)證所設(shè)計(jì)的控制系統(tǒng)對(duì)汽車行駛平順性的有效性。試驗(yàn)方法主要是實(shí)車道路試驗(yàn),試驗(yàn)車輛為安裝有電磁閥式減振器及控制系統(tǒng)的奇瑞G6轎車,如圖6所示。

圖6 試驗(yàn)車輛
根據(jù)文獻(xiàn)[12-13]進(jìn)行實(shí)車道路試驗(yàn),試驗(yàn)方法如下:
(1)分別在空載和滿載的條件下,路面的激勵(lì)分別為過凸塊的脈輸入和隨機(jī)輸入激勵(lì),測(cè)量車身各點(diǎn)三向加速度。
(2)在車輛安裝電磁閥式半主動(dòng)懸架和被動(dòng)懸架的2種條件下,車速分別為40、60、80km/h,按照方法(1)的要求進(jìn)行試驗(yàn),并對(duì)結(jié)果進(jìn)行比較。
試驗(yàn)結(jié)果見表2和3所列,在不同條件下,采用電磁閥式半主動(dòng)懸架控制器的汽車比采用普通被動(dòng)懸架的汽車車身垂直加速度均方根值減小11%~23.5%。

表2 空載隨機(jī)路面時(shí)各點(diǎn)均方根值結(jié)果(被動(dòng)/電磁閥式半主動(dòng)懸架) m/s2

表3 滿載隨機(jī)路面時(shí)各點(diǎn)均方根值結(jié)果(被動(dòng)/電磁閥式半主動(dòng)懸架) m/s2
采用自行開發(fā)的電磁閥式半主動(dòng)懸架控制器的車輛,在不同條件下都能夠有效地降低整車的垂直加速度,明顯優(yōu)于普通被動(dòng)懸架,也證明所采用的控制策略是可行的。
5 結(jié)束語
本文采用魯棒性較強(qiáng)且工程易于實(shí)現(xiàn)的skyhook控制策略,建立等效的skyhook阻尼模型并進(jìn)行仿真分析,仿真結(jié)果表明采用skyhook控制策略的電磁閥式半主動(dòng)懸架明顯優(yōu)于傳統(tǒng)被動(dòng)懸架。
通過實(shí)車試驗(yàn),有效驗(yàn)證了控制策略的正確性。由此說明,所設(shè)計(jì)的電磁閥式半主動(dòng)懸架控制器和采用的控制策略是正確可行的,可有效改善整車行駛平順性[14-15]。
[1] 林 榆 馨.電 子 控 制 懸 架 的 應(yīng) 用 [J].上 海 汽 車,1996(4):136-157.
[2] 郭洪文.NJ2045越野車可調(diào)減振器的研制和半主動(dòng)懸架設(shè)計(jì)[D].長(zhǎng)春:吉林大學(xué),2004.
[3] 李仕生.汽車可變阻尼減振器研究[D].重慶:重慶大學(xué),2006.
[4] 夏 光,唐希雯,汪韶杰,等.汽車磁流變半主動(dòng)懸架控制系統(tǒng)設(shè)計(jì)[J].合肥工業(yè)大學(xué)學(xué)報(bào):自然科學(xué)版,2010,33(12):1765-1769.
[5] Soliman A M A.Improvement of vehicle ride performance using a switchable damper suspension system[C].//SAE World Congress & Exhibition,Detroit,MI,USA,2007:580-588.
[6] 董小閔,余 淼,廖昌榮,等.汽車磁流變半主動(dòng)懸架自適應(yīng) 模 糊 控 制 研 究 [J].中 國(guó) 公 路 學(xué) 報(bào),2006,19(2):111-115.
[7] 陳無畏,王志君,范迪彬.汽車半主動(dòng)懸架的神經(jīng)網(wǎng)絡(luò)自適應(yīng)控制[J].汽車工程,1998,20(1):31-36.
[8] Park K,Kim J,Kim D.A study on the dynamic characteristics of the continuously variable shock absorber for semiactive damping control system[C]//SAE 2005World Congress & Exhibition,Detroit,MI,USA,2005:1711-1719.
[9] 周立功.ARM嵌入式系統(tǒng)基礎(chǔ)教程[M].北京:北京航空航天大學(xué)出版社,2005:201-267.
[10] Karnopp D,Crosby M J,Harwood R A.Vibration control using semi-active force generator[J].ASME Journal of Engineering of Industry,1974:619-626.
[11] 陳杰平.基于 MATLAB/SIMULINK的隨機(jī)路面建模與不平度仿真[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2010,40(3):11-15.
[12] GB/T 4970-1996,汽車平順性隨機(jī)輸入行駛試驗(yàn)方法[S].
[13] GB/T 5902-86,汽車平順性脈輸入行駛試驗(yàn)方法[S].
[14] Crolla D,喻 凡.車輛動(dòng)力學(xué)及其控制[M].北京:人民交通出版社,2004:57-98.
[15] 余 志 生.汽 車 理 論 [M].北 京:機(jī) 械 工 業(yè) 出 版 社,2000:80-96.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
