基于Markov的察打無人機數據鏈時延建模與補償研究
2012-11-03 02:51:59王琛周洲
飛行力學 2012年2期
關鍵詞:方法
王琛, 周洲
(西北工業大學 無人機特種技術國家重點實驗室, 陜西 西安 710065)
基于Markov的察打無人機數據鏈時延建模與補償研究
王琛, 周洲
(西北工業大學 無人機特種技術國家重點實驗室, 陜西 西安 710065)
為了改善在數據鏈時延情況下察打無人機的性能,對造成時延的因素及影響進行了分析,在此基礎上對數據鏈時延進行了合理的假設和簡化。并對無人機整個控制回路的各個節點的響應方式,提出了一種時間-事件-事件-時間驅動方式,使得無人機數據鏈的時延序列具有Markov性,同時給出了狀態轉移矩陣的求取方法。為了改善無人機的響應特性,采用最優控制的方法對時延進行了補償,并基于某無人機平臺驗證了補償方法的有效性。仿真結果表明,該方法的引入使得無人機的動態響應特性有了顯著提高。
察打無人機; Markov鏈; 時延建模; 最優控制; 操縱性
引言
隨著戰爭中對于打擊高時間敏感性目標的需求以及作戰人員安全的要求越來越高,偵察打擊一體化無人機應運而生,且越來越受到各國的重視[1]。2003年“捕食者”無人機在阿富汗擊斃“基地”組織頭目的戰斗就展示了其巨大的戰場效力。然而,與飛行員實時進行操控的飛機不同,察打無人機需要借助數據鏈路來完成控制指令以及機載設備信息的傳輸,因而數據鏈路中存在的不可避免的時延就成為制約察打無人機性能的一大因素。如何精確描述數據鏈時延并對其進行補償也隨之成為一項重要的課題[2]。
國內對于無人機數據鏈時延的研究很少,并且都是把隨機分布的時延轉化為固定的時延從而進行性能分析和補償研究[3],這樣處理對于無人機數據鏈系統存在的隨機時延無法準確地描述和補償。本文創新性地在分析了數據鏈時延的物理誘因后引入一種新型數據驅動方式,并利用Markov理論對時延進行數學建模,得到了時延的數學模型后采用最優控制方法對時延進行了補償研究,并得到了滿意的效果。
1 數據鏈時延產生及影響
現今偵察打擊一體化無人機的指揮是包含地面控制站的大回路控制模式,通過上行數據鏈將控制指令發送到無人機,再經過飛控計算機的計算、舵機的執行完成指令;通過下行數據鏈將無人機的狀態以及采集到的信息送給地面控制站進行決策。系統示意圖如圖1所示。
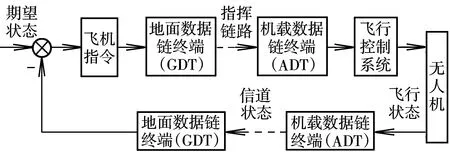
圖1 偵察打擊一體化無人機任務規劃系統示意圖
無人機數據鏈時延產生的因素分為4個部分:通信時延、執行時延、數據時延和擾動時延。其中影響最大的是通信時延和執行時延,通信時延是由電磁信號在空間的傳輸造成的;執行時延是由于解釋、計算、執行控制指令等造成,包括傳感器的時延、計算機運算時延等[2]。
如果將無人機大控制回路的數據鏈時延簡化為上行時延和下行時延并用時延環節e-δt1s和e-δt2s來表示,且將飛控系統和無人機模型用C(s)和G(s)表示,簡化回路如圖2所示。
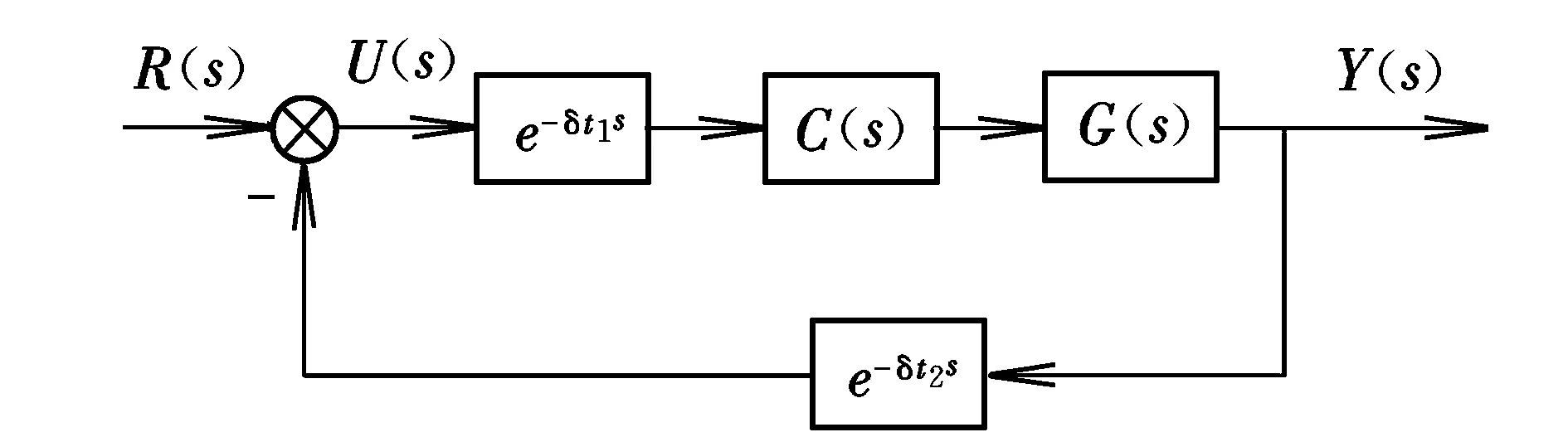
圖2 無人機控制回路
無人機數據鏈加入時延后的傳遞函數將會變為:
(1)
回路中特征多項式的改變,導致系統的零極點發生變化,通過以上的分析可以看出數據鏈時延對無人機的操縱性有影響,而不僅僅是無人機響應的滯后[3]。
2 數據鏈時延建模
2.1 數據鏈的信息傳遞機理和簡化
無人機的主要控制節點間數據流向及主要時延因素如圖3所示。

圖3 數據鏈信息流向與主要時延圖
數據表明,通信和執行時延影響占整個時延影響的90%以上[3],因此可以合理地假設在建模中只存在通信和執行時延,并在此基礎上作如下假設:
(1)只考慮下行鏈路中的無人機狀態信息而不考慮機載設備的數據,數據量很小;
(2)數據鏈路沒有丟包;
(3)數據鏈路沒有時序混亂。
基于以上假設,對于傳感器、地面控制系統、飛控計算機、舵機分別采用時間-事件-事件-時間的驅動方式,所有控制節點采用等周期同步T采樣方式,定義在k-n時刻傳感器產生的控制量為uk-n,那么整個回路中的信息傳輸時序如圖4所示。
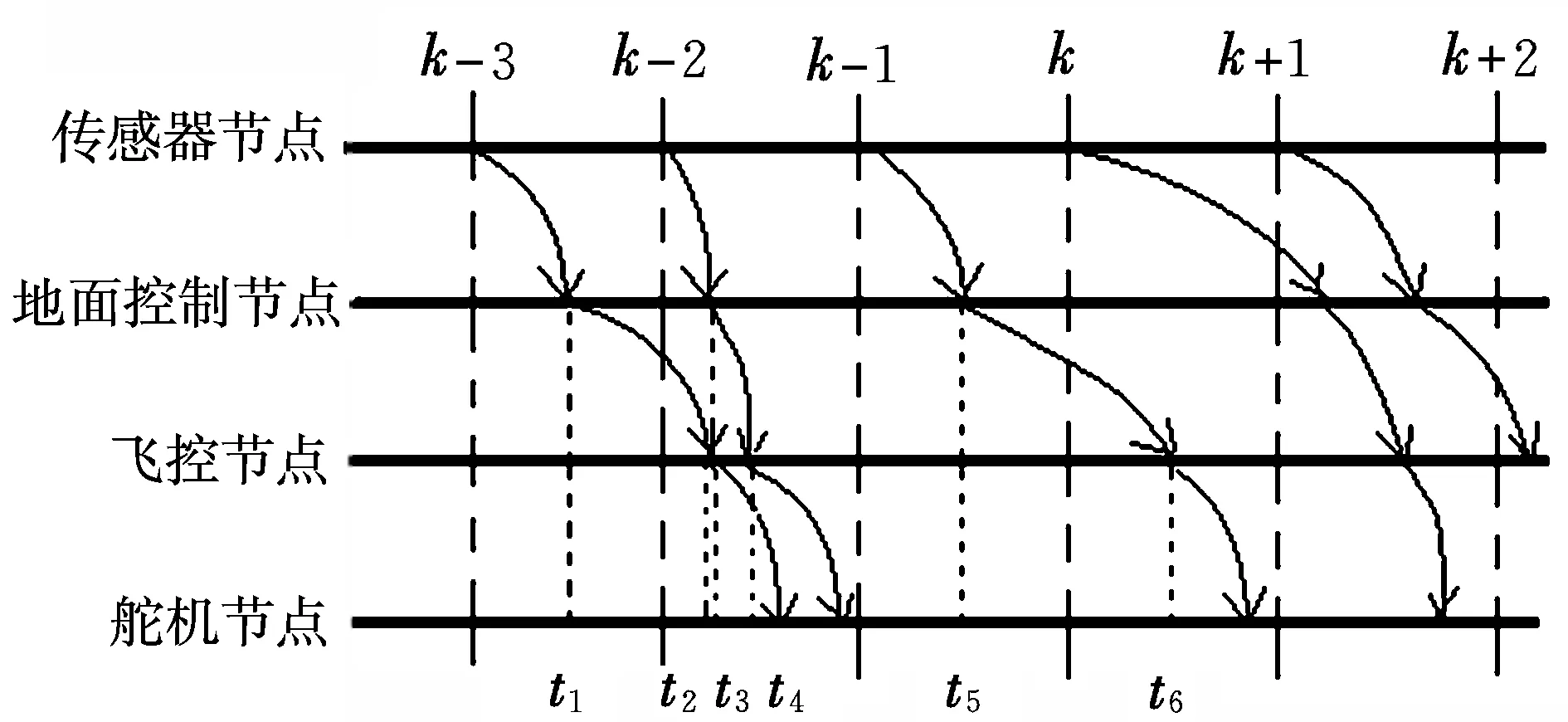
圖4 無人機數據鏈信息傳輸時序圖
時間驅動指節點在時鐘周期的作用下定時采樣信號,將信號進行處理后通過數據鏈送至下一節點的驅動方式;事件驅動指信息一旦到達,控制器立即對信息進行處理,并將處理信息送出的驅動方式。
設k時刻的數據鏈時延為dk, 規定若k時刻到達舵機的傳感器信號為uk-n,則dk=k-(k-n)=n,即時延為nT個時鐘周期。在k時刻沒有新的信號到達,控制量仍沿用uk-2,所以時延為2T。并且每一時刻的時延是在最大時延和最小時延之間以某概率分布,并且此概率依一定規律變化。經過以上假設建模后,利用Markov理論便可以找出時延序列概率變化。
2.2 Markov鏈模型的建立
Markov性是指事件“未來”的狀態只與“現在”有關,而和“過去”狀態獨立的性質[4]。基于2.1節的假設和簡化后,傳感器的信號是按照傳感器產生信息的先后順序到達舵機,且在同一個采樣周期內舵機只能執行一個控制信號,所以“未來”的時延分布可以由“現在”的分布決定,即由k時刻時延的概率分布就可以推得k+1時刻時延的概率分布,這樣無人機數據鏈的多步隨機傳輸時延序列dk(k=0,1,2,…)形成Markov鏈。dk為采樣周期的倍數,且dk∈{m,m+1,…,n},m=tmin/T,n=tmax/T,其中tmin,tmax分別為最大和最小時延。設π(k)為dk的概率分布函數,dk服從如下分布[5]:
dk~π(k)=
(2)
根據Markov鏈的性質有:
π(k+1)=π(k)QM(k=0,1,2,…)
(3)
式中,QM為轉移矩陣。
定義轉移概率:
(4)
依據式(3),由初始時延概率分布π(0)和狀態轉移矩陣QM就可以知道之后任意采樣周期的時延概率分布π(k)。π(0)可以通過實驗的方法獲得,將機載時鐘和基站時鐘同步,給主機發送的數據打上時間戳,無人機接收時與機載時鐘比對就可以計算出上行時延,類似可得到下行時延,經過多次實驗就可以獲得π(0)。QM可以由圖2得出,下式是描述相鄰時刻間時延概率分布變化的重要公式[6]。
q(i-m)(j-m)=
(5)
3 無人機模型及時延補償方法
3.1 無人機小擾動模型
無人機有對稱平面,略去機體內轉動部件的陀螺力矩效應。基準運動中,對稱平面處于鉛垂方向且運動所在平面與飛機對稱平面重合。將無人機6自由度方程采用線性小擾動簡化并橫縱分離,再將縱向小擾動方程離散化,得到:
(6)
當X=[ΔVΔαΔqΔθ]T時,被控對象為縱向方程;當X=[ΔβΔωxΔωyΔγ]T時,被控對象為橫向方程。
3.2 時延補償方法研究
雖然k時刻到達舵機的控制量無法完全確定,但是由2.2節可以知道到達的ui時延具有Markov性,并可以得到k時刻時延的概率分布,且狀態變量方便可測,因此對系統采用全狀態反饋并應用最優控制理論設計控制律,使性能指標
(7)
達到最小,令:
利用以上增廣的量將式(6)和式(7)改寫為:
(8)
(9)
并采用動態規劃法得到滿足指標式(7)的最優控制律[7]為:

(10)
其中:
(11)
(12)
設式(11)中4個括號內表達式為eq,則其期望值為:
利用式(10)可以求出每一時刻針對此刻時延進行補償的控制量大小,由于在每一時刻時延序列是依概率分布的,無法精確補償,所以針對這一情況采用求期望的標準進行補償,這也很好地結合了之前對數據鏈時延的Markov建模的結果。
3.3 仿真驗證
為了驗證本方法對時延建模和補償方法的有效性,以某型察打無人機為平臺進行仿真驗證:無人機的系統時鐘周期為0.02 s。無人機初始狀態為Ma=0.61,h=5 000 m的定直平飛狀態,仿真結果如圖5所示。
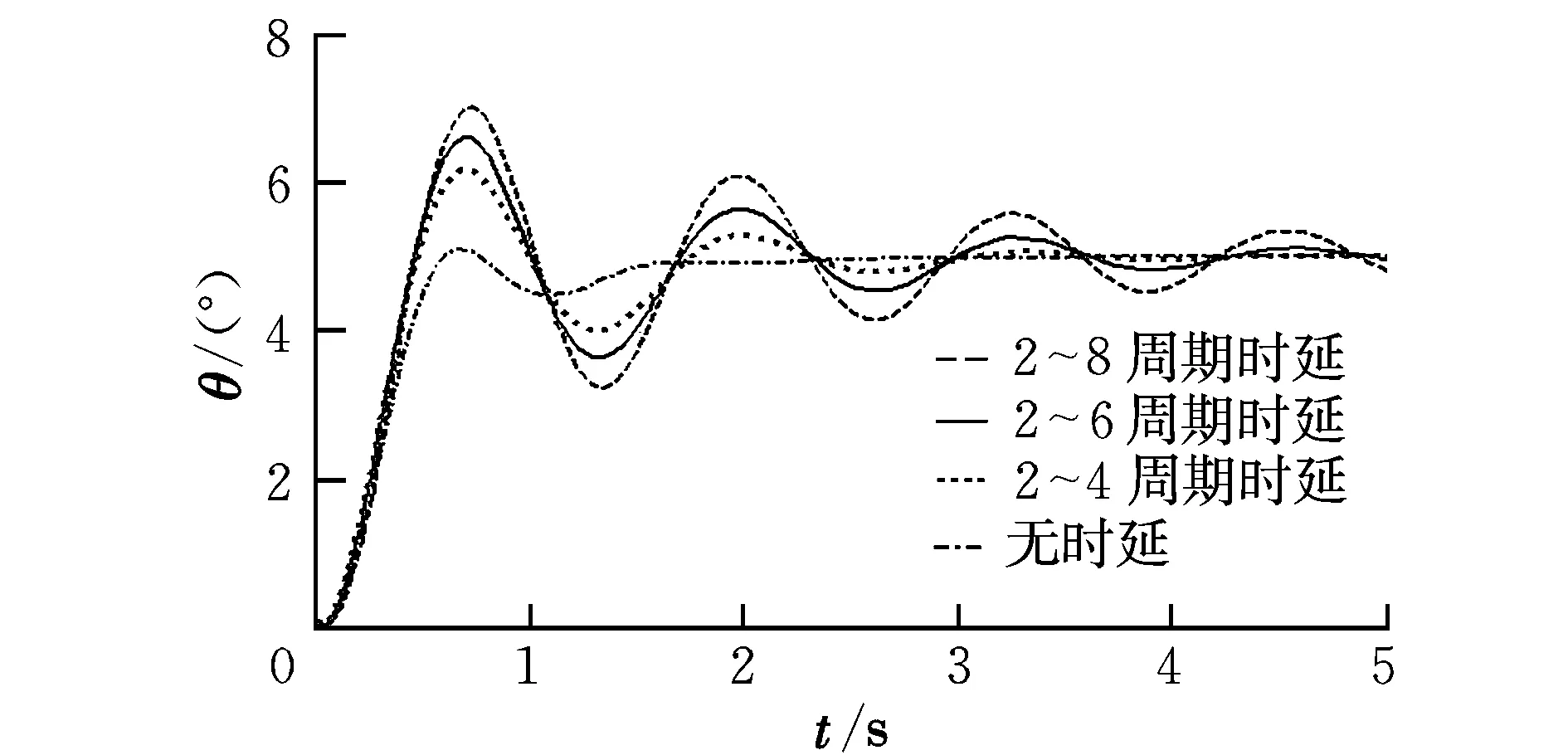
圖5 未補償時無人機俯仰角響應曲線
圖5表明加入時延后無人機的響應特性明顯變差,驗證了之前時延會對無人機動態響應特性產生影響的理論分析。并且表明隨著時延的增大,無人機的動態特性會隨之變差。可以預見,時延繼續增大無人機會變得不可控制。
如果假定時延范圍為0.02~0.12 s,即1~6個時鐘周期。輸入階躍信號,將不考慮時延、加入時延、時延補償3種情況下無人機響應情況進行比較,結果如圖6和圖7所示。對比圖中3種情況下無人機姿態角的響應可以看出,隨著建立在Markov基礎上的數據鏈時延的建模和最優控制法的引入,無人機的俯仰角超調量減小了47%,進入穩定的時間縮短了1.5 s;滾轉角響應超調量減少了58%,進入穩定的時間縮短了1.2 s,有效地改善了無人機的動態響應特性,證明本文的建模和補償方法是有效可行的。
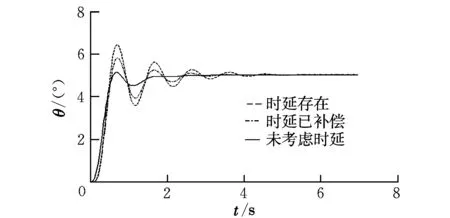
圖6 俯仰角指令為5°的響應曲線
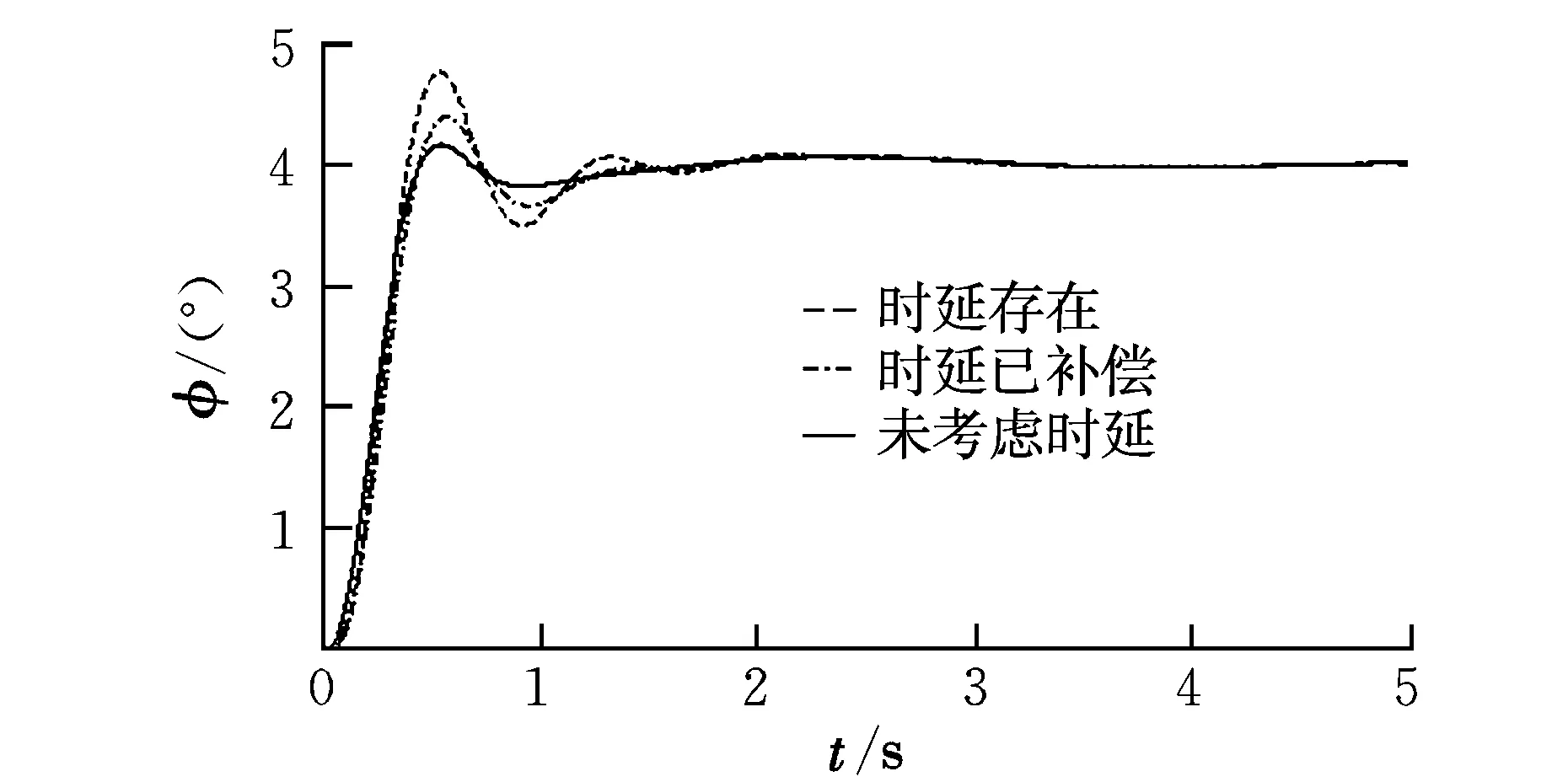
圖7 滾轉角指令為4°的響應曲線
4 結束語
通過本文研究表明,隨著無人機時延的增大,無人機的動態響應特性逐漸變差,并且當延時增大到一定程度,無人機將變得難以控制,因此在進行數據鏈設計時應盡量減小時延以保證無人機性能。經過本文中的對于數據鏈時延的建模和補償后,無人機的動態響應特性明顯改善,說明了基于Markov的建模和采用最優控制方法進行補償是有效可行的。由于提高時延建模的精度對于補償方法的改進至關重要,未來改進時延的描述算法是非常有必要的。
[1] Mulder J A.Unmanned aircraft systems roadmap,2005-2030[R].Office of the Secretary of Defense of USA,2004:105-106.
[2] Paul G Fahlstrom,Thomas J Gleason.Introduction to UAV Systems[M].Maryland:Uavsystems Inc,2007:20-21.
[3] 陳占海.偵察打擊一體化無人機數據鏈延時影響研究[D].西安:西北工業大學,2010.
[4] 張波,商豪.應用隨機過程[M].北京:中國人民大學出版社,2009.
[5] 代雙鳳.網絡控制系統的Markov建模設計與分析[D].秦皇島:燕山大學,2008.
[6] 于之訓,陳輝堂,王月娟.基于Markov延遲特性的閉環網絡控制系統研究[J].控制理論與應用,2002,19(2):263-267.
[6] 吳受章.應用最優控制[M].西安:西安交通大學出版社,1986.
ResearchonmodelingandcompensationmethodfordatalinkdelayofRSIUAVbasedonMarkovtheory
WANG Chen, ZHOU Zhou
(National Key Laboratory of Science and Technology on UAV, NWPU, Xi’an 710065, China)
This paper improves the performance of RSIUAV while considering the datalink delay. At the beginning, this paper analyzes the factors which induce the delay, reveals the influence of the delay and makes reasonable assumption and simplification to datalink delay. Then, in order to get the datalink delay to observe Markov chain, the paper gives a brand new data-driven mode, the corresponding Markov state transition matrix is given also. Finally, for compensating the delay, this paper uses optimal control method and verifies the effect based on a kind of RSIUAV. The simulation result shows that the application of modeling and compensation method distinctly improves the dynamic corresponding characteristic of RSIUAV.
RSIUAV; Markov chain; modeling of time delay; optimal control; maneuverability
2011-10-06;
2011-12-20
王琛(1987-),男,陜西西安人,博士研究生,研究方向為飛行力學與控制。
V279
A
1002-0853(2012)02-0147-04
(編輯:方春玲)
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56