增程式電動(dòng)車驅(qū)動(dòng)系統(tǒng)的參數(shù)匹配與仿真研究
2012-11-05 05:40:08謝英杰孟慶楠
北京汽車 2012年6期
謝英杰,孟慶楠
Xie Yingjie, Meng Qingnan
(長(zhǎng)城汽車股份有限公司技術(shù)中心,河北省汽車工程技術(shù)研究中心,河北 保定 071000)
0 引 言
從驅(qū)動(dòng)系統(tǒng)結(jié)構(gòu)上劃分,增程式電動(dòng)汽車應(yīng)該屬于串聯(lián)式混合動(dòng)力電動(dòng)汽車。稱其為“增程式電動(dòng)汽車”,是因?yàn)槠湓O(shè)計(jì)的初衷是以純電動(dòng)模式行駛為主,當(dāng)動(dòng)力電池電量不足時(shí)發(fā)動(dòng)機(jī)帶動(dòng)發(fā)電機(jī)為牽引電動(dòng)機(jī)提供電能,從而“增加”電動(dòng)汽車的續(xù)駛里程,這一行駛模式即稱為“增程模式”。
增程式電動(dòng)汽車不但實(shí)現(xiàn)了長(zhǎng)續(xù)駛里程內(nèi)的純電動(dòng)模式行駛,而且其驅(qū)動(dòng)系統(tǒng)的結(jié)構(gòu)和整車控制策略簡(jiǎn)單,容易實(shí)現(xiàn)。國(guó)內(nèi)外汽車廠紛紛推出自己的增程式電動(dòng)汽車。增程式電動(dòng)車驅(qū)動(dòng)系統(tǒng)的組成如圖1所示。
1 驅(qū)動(dòng)系統(tǒng)參數(shù)匹配
通過(guò)一個(gè)設(shè)計(jì)實(shí)例,介紹增程式電動(dòng)汽車驅(qū)動(dòng)系統(tǒng)主要部件的匹配方法,并運(yùn)用PSAT軟件進(jìn)行整車動(dòng)力性和經(jīng)濟(jì)性的仿真分析和驗(yàn)證。整車的設(shè)計(jì)與性能目標(biāo)要求見(jiàn)表1。
1.1 傳動(dòng)裝置齒輪傳動(dòng)比的匹配設(shè)計(jì)
傳動(dòng)裝置齒輪傳動(dòng)比的設(shè)計(jì)應(yīng)使?fàn)恳妱?dòng)機(jī)在最高轉(zhuǎn)速時(shí)車輛達(dá)到其最高車速,即

表1 整車的設(shè)計(jì)要求與性能要求
式中,ig為變速器傳動(dòng)比;io為主減速器傳動(dòng)比;nmax為電動(dòng)機(jī)的最高轉(zhuǎn)速,r/min;rd為車輪滾動(dòng)半徑,m;vmax為最高車速,km/h。
假設(shè)牽引電動(dòng)機(jī)的最高轉(zhuǎn)速nmax=8000 r/min,將相應(yīng)各參數(shù)值代入式(1),則可得igio=6.17。
可以由經(jīng)驗(yàn)公式估算轉(zhuǎn)動(dòng)慣量系數(shù)
式中,δ1表示車輪的作用,其估算值為0.04;δ2表示與動(dòng)力裝置相關(guān)的旋轉(zhuǎn)部件的作用,其估算值為0.0025。得到轉(zhuǎn)動(dòng)慣量系數(shù)δ為1.135。
1.2 牽引電動(dòng)機(jī)量值的匹配設(shè)計(jì)
如圖2,顯示了牽引電動(dòng)機(jī)的轉(zhuǎn)矩(功率)-轉(zhuǎn)速特性。一般來(lái)說(shuō)牽引電動(dòng)機(jī)的額定功率用于維持車輛等速行駛,而牽引電動(dòng)機(jī)的峰值功率決定車輛的加速特性和爬坡能力。
在串聯(lián)式混合動(dòng)力電動(dòng)汽車中,電動(dòng)機(jī)的峰值功率完全取決于車輛的加速性能要求、電動(dòng)機(jī)特性和傳動(dòng)裝置特性。可以根據(jù)式(3)推導(dǎo)計(jì)算出牽引電動(dòng)機(jī)峰值功率。
式中,Pmax為牽引電動(dòng)機(jī)的峰值功率,kW;ηt為傳動(dòng)系統(tǒng)的傳動(dòng)效率;δ為轉(zhuǎn)動(dòng)慣量系數(shù);m為車輛質(zhì)量,kg;ta為加速時(shí)間,s;vf為車輛加速后的終速,m/s;vb為相應(yīng)于牽引電動(dòng)機(jī)基速的車速,m/s,假設(shè)牽引電動(dòng)機(jī)的基速nc=2000 r/min,則vb=10.42 m/s;g為重力加速度(9.8 m/s2);f為滾動(dòng)阻力系數(shù);CD為空氣阻力系數(shù);A為迎風(fēng)面積,m2;ρ為空氣密度,一般ρ=1.2258 N?s2?m-4。
將相應(yīng)各參數(shù)值代入式(3),則可得牽引電動(dòng)機(jī)的峰值功率Pmax=72 kW。
在設(shè)計(jì)的初始階段,可應(yīng)用式(4),按最高車速估算出電動(dòng)機(jī)的額定功率
式中,Pc為牽引電動(dòng)機(jī)的額定功率,kW。
注意,如果不要求車輛能以最高車速持續(xù)地穩(wěn)定行駛,則為了降低成本和減小牽引電動(dòng)機(jī)的體積,應(yīng)盡量使?fàn)恳妱?dòng)機(jī)的額定功率小于由公式(4)計(jì)算出的功率值。
根據(jù)式(4)計(jì)算得Pc=40.87 kW,考慮到實(shí)際情況并不要求車輛能以最高車速長(zhǎng)時(shí)間行駛,所以該功率可適當(dāng)降低,這里令牽引電動(dòng)機(jī)的額定功率Pc=40 kW。
計(jì)算出牽引電動(dòng)機(jī)的峰值功率和額定功率后,可以通過(guò)式(5)計(jì)算出牽引電動(dòng)機(jī)的峰值轉(zhuǎn)矩和額定轉(zhuǎn)矩
由式(5)計(jì)算得:牽引電動(dòng)機(jī)的峰值轉(zhuǎn)矩Tmax=343.8 N ? m,額定轉(zhuǎn)矩Tc=191 N ? m。
然后,由牽引電動(dòng)機(jī)的峰值轉(zhuǎn)矩計(jì)算出車輛的爬坡能力,驗(yàn)證上述匹配完成的牽引電動(dòng)機(jī)是否滿足要求,如圖3所示。圖3表明計(jì)算出的爬坡能力大于設(shè)計(jì)要求規(guī)定的性能指標(biāo),上述匹配完成的牽引電動(dòng)機(jī)滿足車輛的性能要求。
1.3 發(fā)動(dòng)機(jī)/發(fā)電機(jī)量值的匹配設(shè)計(jì)
在增程式電動(dòng)車進(jìn)入增程模式行駛時(shí),發(fā)動(dòng)機(jī)/發(fā)電機(jī)用以供給穩(wěn)態(tài)功率,以防止動(dòng)力電池完全放電。對(duì)于發(fā)動(dòng)機(jī)/發(fā)電機(jī)的設(shè)計(jì),應(yīng)考慮兩種駕駛情況:
(1)長(zhǎng)時(shí)間采用恒定車速的行駛情況,如在高速公路上的運(yùn)行和在軟路面上的越野行駛。要求車輛滿足以高速公路上限車速(120 km/h)行駛的需要,此時(shí)發(fā)動(dòng)機(jī)/發(fā)電機(jī)應(yīng)有足夠的功率支持這一車速的運(yùn)行。在平坦路面上恒速行駛時(shí),來(lái)自發(fā)動(dòng)機(jī)的輸出功率可表達(dá)為
式中,Pe為平坦路面上恒速行駛時(shí)來(lái)自發(fā)動(dòng)機(jī)的輸出功率,kW;ηt為傳動(dòng)裝置的效率,取90%;ηm為牽引電動(dòng)機(jī)的效率,取90%;ηg為發(fā)電機(jī)的效率,取90%。
將各相應(yīng)參數(shù)代入式(6)計(jì)算得:Pe=29.8 kW。
(2)采用頻繁的停車-起動(dòng)模式的行駛情況,如市區(qū)內(nèi)的車輛行駛。發(fā)動(dòng)機(jī)/發(fā)電機(jī)所產(chǎn)生的功率應(yīng)等于或略大于平均的負(fù)載功率,以保持動(dòng)力電池穩(wěn)定的能量?jī)?chǔ)存。平均的負(fù)載功率可表示為
式中,Pave為市區(qū)工況的平均負(fù)載功率,kW;T為市區(qū)工況的總運(yùn)行時(shí)間,s;dv/dt為車輛的加速度,m/s2。
以NEDC(New European Driving Cycle)循環(huán)、UDDS(Urban Dynamometer Driving Schedul)循環(huán)和US06(美國(guó)聯(lián)邦試驗(yàn)規(guī)程e)循環(huán)為例,由表2可知,這些行駛循環(huán)中的平均功率是較小的,因此發(fā)動(dòng)機(jī)功率為29.8 kW可以滿足這些駕駛循環(huán)的需要。
然而,發(fā)動(dòng)機(jī)理應(yīng)供給更多的功率,以承載連續(xù)的非牽引負(fù)載,如燈光、娛樂(lè)、通風(fēng)、空調(diào)、動(dòng)力轉(zhuǎn)向裝置和制動(dòng)增壓等。綜上,發(fā)動(dòng)機(jī)需要產(chǎn)生約31 kW的功率才能滿足要求。
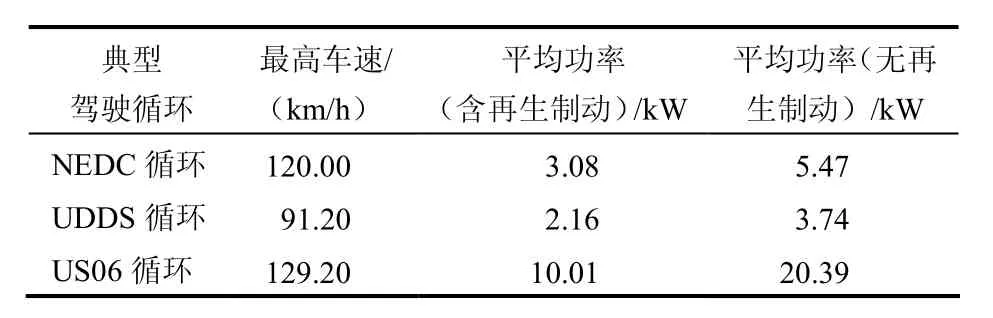
表2 不同行駛循環(huán)中的典型數(shù)據(jù)
圖4表明了發(fā)動(dòng)機(jī)的效率圖以及最佳效率運(yùn)行點(diǎn)(點(diǎn)a),在該點(diǎn)處,產(chǎn)生了對(duì)應(yīng)的31 kW的功率。可以看出,在點(diǎn)b處,最大的發(fā)動(dòng)機(jī)功率約為74 kW。
可以確定:此發(fā)動(dòng)機(jī)最大功率為74 kW(5700 r/min),最大轉(zhuǎn)矩為145.6 N?m(3477 r/min);發(fā)電機(jī)的額定功率為31 kW(2193~5700 r/min),峰值功率為59 kW(2193~5700 r/min)。
圖5所示的是發(fā)動(dòng)機(jī)功率的另一設(shè)計(jì)。圖中所設(shè)計(jì)的發(fā)動(dòng)機(jī)運(yùn)行點(diǎn)接近其最大功率,可產(chǎn)生所需的31 kW功率。
可以確定:發(fā)動(dòng)機(jī)最大功率為37 kW(5700 r/min),最大轉(zhuǎn)矩為73 N·m(3477 r/min);發(fā)電機(jī)的額定功率為31 kW(3000~6000 r/min),峰值功率為31 kW(3000~6000 r/min)。
比較這兩種設(shè)計(jì)發(fā)現(xiàn):相比第1種設(shè)計(jì),第2種設(shè)計(jì)的發(fā)動(dòng)機(jī)/發(fā)電機(jī)要小得多,雖然在增程模式下以120 km/h恒速行駛時(shí),第1種設(shè)計(jì)油耗較小,然而在低車速或市區(qū)范圍內(nèi)行駛時(shí),發(fā)動(dòng)機(jī)的平均負(fù)載功率小得多,第 2種設(shè)計(jì)可能更加經(jīng)濟(jì)。故選第2種設(shè)計(jì)。
1.4 動(dòng)力電池量值的匹配設(shè)計(jì)
對(duì)于增程式電動(dòng)車來(lái)說(shuō),在全電力驅(qū)動(dòng)模式下要求能發(fā)揮牽引電動(dòng)機(jī)的所有功率,又因?yàn)榇藭r(shí)發(fā)動(dòng)機(jī)/發(fā)電機(jī)的輸出功率為零,故而動(dòng)力電池的功率容量為
考慮到需要承載連續(xù)的非牽引負(fù)載,令Pess=85 kW。
動(dòng)力電池的能量容量取決于行駛循環(huán)和總體的控制策略。此次設(shè)計(jì)采用的是歐洲城市行駛循環(huán),要求全電力驅(qū)動(dòng)模式的行駛里程大于64 km。由于發(fā)動(dòng)機(jī)/發(fā)電機(jī)的功率容量遠(yuǎn)大于平均的負(fù)載功率,因此,采用“恒溫器”控制策略。
圖6表明了實(shí)施“恒溫器”控制策略的上述車輛在連續(xù)64個(gè)ECE(Economic Commission of Europe)行駛循環(huán)(約合64.7 km)中的動(dòng)力電池輸出能量的變化。模擬中,包含了再生制動(dòng)。控制中允許動(dòng)力電池的最大能量變動(dòng)為9.46 kW?h。令 SOCtop=0.85,SOCbott=0.3,則動(dòng)力電池的全部能量可以用式(9)進(jìn)行計(jì)算:
式中,Ecap為動(dòng)力電池的全部能量,為動(dòng)力電池的最大能量變化值,kW?h;SOCtop和SOCbott為動(dòng)力電池荷電狀態(tài)的頂限值與底限值。
根據(jù)式(9)可得動(dòng)力電池的全部能量為17.2 kW?h。為保證一定的富余量,令Ecap=17.28 kW?h。
2 仿真研究
將上述已經(jīng)匹配好的各零部件參數(shù)輸入到PSAT仿真軟件中,選取“恒溫器”控制策略作為仿真策略,分別對(duì)上述車輛的動(dòng)力性(包括最高車速、加速時(shí)間和最大爬坡能力)和經(jīng)濟(jì)性(包括全電力驅(qū)動(dòng)模式的行駛里程和電能消耗率以及增程模式下的油耗)后進(jìn)行仿真分析。仿真結(jié)果見(jiàn)表3。
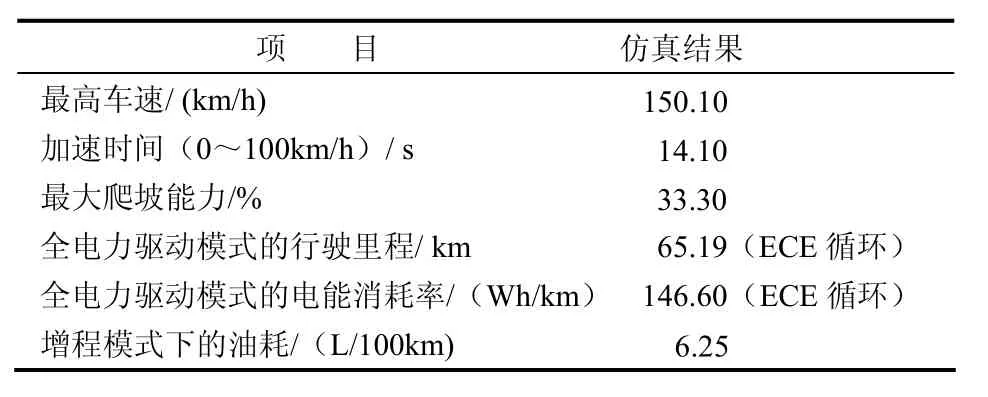
表3 增程式電動(dòng)車動(dòng)力性和經(jīng)濟(jì)性仿真結(jié)果
由上述仿真結(jié)果可知,所匹配設(shè)計(jì)的驅(qū)動(dòng)系統(tǒng)能夠滿足整車的性能要求。在增程模式下行駛時(shí),雖然有制動(dòng)能量回收,但整車的燃油消耗率仍高達(dá)6.25 L/100 km,與傳統(tǒng)車輛相比其油耗并不低。這是因?yàn)樵从诎l(fā)動(dòng)機(jī)的能量被兩次轉(zhuǎn)換(在發(fā)電機(jī)中,由機(jī)械能轉(zhuǎn)變?yōu)殡娔埽辉跔恳妱?dòng)機(jī)中,由電能轉(zhuǎn)變?yōu)闄C(jī)械能)后傳遞到終端——驅(qū)動(dòng)輪。發(fā)電機(jī)和牽引電動(dòng)機(jī)兩者的低效率導(dǎo)致顯著的損耗。
3 結(jié) 論
(1)根據(jù)文中所述的方法匹配設(shè)計(jì)的增程式電動(dòng)車,經(jīng)過(guò)仿真驗(yàn)證,能夠滿足整車的性能設(shè)計(jì)要求。
(2)增程式電動(dòng)車不同于傳統(tǒng)的串聯(lián)式混合動(dòng)力汽車,其較長(zhǎng)的“純電動(dòng)行駛”里程和不低的“增程模式”油耗,決定了增程式電動(dòng)車更偏向于純電動(dòng)車。
(3)在動(dòng)力電池技術(shù)短時(shí)間內(nèi)無(wú)法取得重大突破的前提下,增程式電動(dòng)車一定程度上解決了純電動(dòng)車?yán)m(xù)駛里程無(wú)法與傳統(tǒng)汽車相比的難題,可以作為過(guò)渡車型投入研發(fā)。
[1]余志生.汽車?yán)碚摚ǖ谒陌妫M]. 北京:機(jī)械工業(yè)出版社,2008.
[2]Mehrdad Ehsani,Yimin Gao,Ali Emadi. Modern Electric,Hybrid Electric,and Fuel Cell Vehicles Fundamentals,Theory,and Design Second Edition. CRC Press,2010.
[3]GB/T 19596-2004 電動(dòng)汽車術(shù)語(yǔ)[S].
[4]GB/T 18385-2005 電動(dòng)汽車 動(dòng)力性能 試驗(yàn)方法[S].
[5]GB/T 18386-2005 電動(dòng)汽車 能量消耗率和續(xù)駛里程試驗(yàn)方法[S].
猜你喜歡
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
Coco薇(2017年5期)2017-06-05 08:53:16
軍事文摘(2016年16期)2016-09-13 06:15:49
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
電力工程技術(shù)(2014年1期)2014-03-20 14:19:06
汽車與新動(dòng)力(2013年5期)2013-03-11 16:08:17
燃?xì)鉁u輪試驗(yàn)與研究(2010年4期)2010-04-16 03:54:22
