鉸接盾構自動導向系統測量方法*
2012-11-14 13:45:32潘國榮李懷鋒
大地測量與地球動力學 2012年3期
潘國榮 白 昀 李懷鋒
(1)同濟大學測量與國土信息工程系,上海 200092 2)國家測繪局現代工程測量重點實驗室,上海200092)
鉸接盾構自動導向系統測量方法*
潘國榮1,2)白 昀1)李懷鋒1)
(1)同濟大學測量與國土信息工程系,上海 200092 2)國家測繪局現代工程測量重點實驗室,上海200092)
運用三維直角坐標轉換模型,解算盾構機軸線局部坐標系與實際三維空間坐標系兩種坐標系之間的轉換關系,然后利用轉換關系求出鉸接盾構機盾尾中心和鉸接中心的坐標,再由鉸接中心和得到的鉸接千斤頂推進里程推求盾首中心的實際坐標,計算盾構機的姿態。該方法運用于地鐵盾構的導向測量中,取得了令人滿意的結果。
三維直角坐標轉換;鉸接盾構;七參數;盾構姿態;導向測量
1 引言
近幾年,隨著城市建設的不斷發展和需求量的不斷增加,城市地鐵進入了建設的高峰期,而地鐵施工測量也遇到了各種各樣的難題。在城市地鐵建設中,通常所使用的盾構機的直徑約6 m,長度約8 m,靈敏度(L/D)通常達到約1.3,因此很難在半徑很小的曲線段隧道中進行轉彎施工。為了提高盾構機的可操作性,就有了鉸接盾構機,鉸接盾構機就是將盾構機分為前體和后體兩個部分,中間用千斤頂連接起來,形成一個鉸接裝置,圖1顯示的是上下兩個鉸接千斤頂(一般情況開啟4個,左右、上下對稱)。這樣可以使盾構機分成兩個小段,滿足小半徑曲線隧道轉彎施工,在特殊的路徑施工中能發揮獨特的作用。
鉸接千斤頂的兩端分別和盾構機的前體和后體用鉸銷連接,由于鉸接千斤頂沿盾構圓周布置,其兩端的鉸銷處都裝有球鉸,以保證鉸接千斤頂軸線與盾構機軸線之間有一定的擺動角度。國內第一臺鉸接千斤頂于2004年5月投入使用,已成功應用于肇嘉浜路污水改造工程,并解決了隧道轉彎半徑小、掘進“拐彎”難的問題。

圖1 鉸接盾構示意圖Fig.1 Sketch of link shield
在地鐵隧道自動導向測量中,為了保證隧道成型與貫通質量,需要實時地獲取盾構機的姿態,根據得到的偏差指導施工,盾構機的姿態通常是利用全站儀獲取事先在盾構機上預設的特征點的坐標來計算的[1]。文獻[2]中所介紹的方法是求解方程組,實際上就是點與點、點與平面間的距離公式推算而出,該方法通過方程組求解出盾首、盾尾的三維施工坐標系坐標。這種解法數學模型相對簡單,只能根據3個公共點來求解,沒有多余觀測,不能作有效的檢核。文獻[3]中應用的方法是前后標尺法,通過測量得到的前尺、后尺數據推求盾首、盾尾的平面坐標。前后標尺法的數學模型是相似三角形原理,但是將該方法應用在曲線段時,由于設計軸線不與相似三角形輔助線重合,進而產生了一定的計算誤差。
據此可知,在一般的地鐵隧道施工中,由于曲線段的半徑比較大,一般的盾構機對轉向的要求不高,普通的土壓平衡盾構掘進機就可以適用,但隨著施工要求越來越高,為了滿足小半徑曲線,一般的掘進機不再適合施工,需要采用鉸接盾構,而目前又沒有較好的鉸接盾構的自動導向系統,由此,本文提出了運用三維直角坐標轉換模型,解算盾構機軸線局部坐標系與實際三維空間坐標系兩種坐標系之間的轉換關系,然后利用轉換關系求出鉸接盾構機盾尾中心和鉸接中心的坐標,與此同時同步從盾構機PLC(PLC是一種專門為在工業環境下應用而設計的數字運算操作的電氣控制系統,它采用可以編制程序的存儲器來進行邏輯運算與存儲輸出)中實時讀取鉸接千斤頂的里程數據,根據盾首與鉸接千斤頂的空間距離計算盾首的空間坐標,最后計算出盾構機盾首的坐標,與設計軸線對比,計算出鉸接盾構盾尾盾首的姿態偏差。本文所提出的坐標轉換模型是在原有的三維直角坐標轉換模型的基礎上,結合PLC中得到的鉸接千斤頂數據,求解鉸接盾構盾首盾尾坐標的方法,該自動導向系統通過一次學習過程記錄數據,通過電腦控制全站儀達到實時測量的目的,能很好地幫助施工人員實時了解偏差數據,減少測量時間,提高隧道的成型質量和貫通質量。
2 三維直角坐標轉換模型
2.1 數學模型
設點P在三維坐標系O-XYZ中的坐標為(X,Y,Z),在三維坐標系o'-x'y'z'中的坐標為(x',y',z'),兩坐標系的關系如圖2所示。
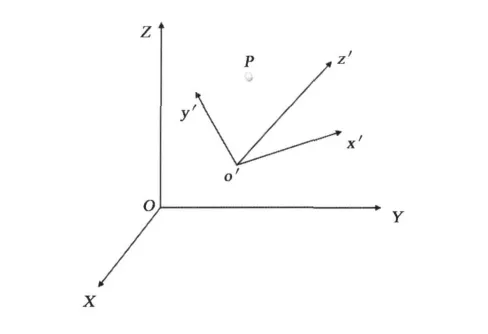
圖2 三維直角坐標轉換模型Fig.2 3D right-angle coordinate transformation model
兩個空間直角坐標系的轉換模型,可以用矩陣表示為:

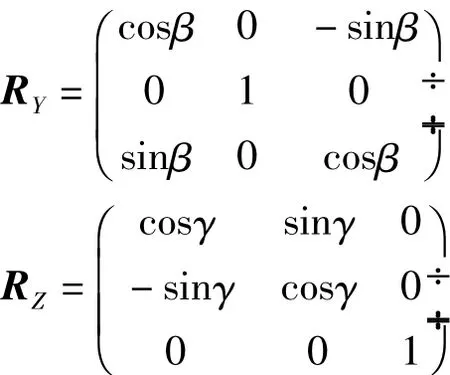
式中,(ΔX,ΔY,ΔZ)T為坐標系o'-x'y'z'的原點在坐標系O-XYZ中的三維坐標,即坐標系平移量,k為尺度參數,一般為1,R為旋轉矩陣。旋轉矩陣R由坐標系旋轉得到:其中,繞X軸逆時針旋轉角度α,得到矩陣RX;繞Y軸逆時針旋轉角度β,得到旋轉矩陣RY;繞Z軸逆時針旋轉角度γ,得到矩陣RZ。將3個矩陣相乘,即得到旋轉矩陣R。

一般情況下,尺度參數k為1,即不考慮尺度縮放,此時參數變為6。利用泰勒公式展開得點的誤差方程為:
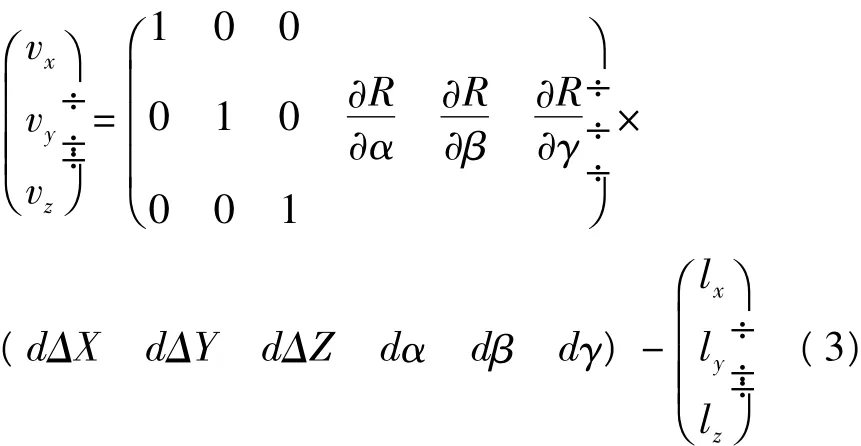
式中:
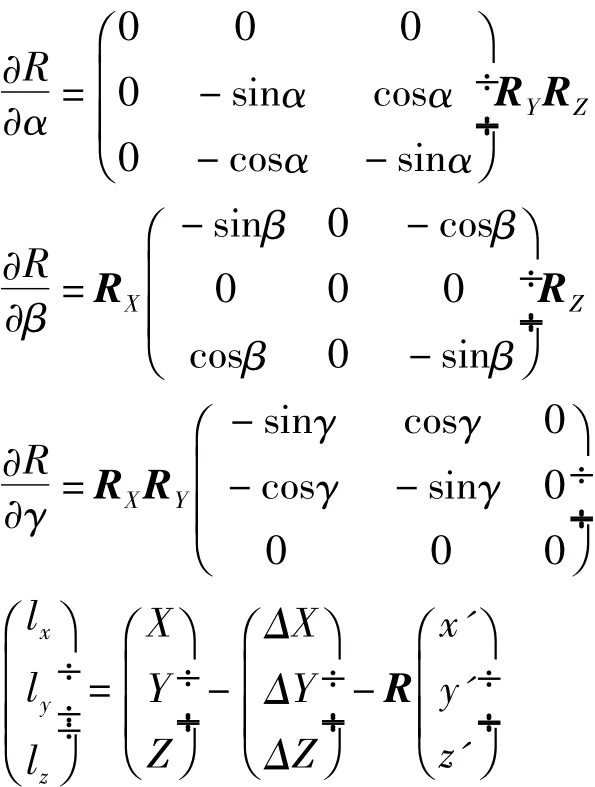
式中α、β、γ的單位為弧度。
將所有參考點的誤差方程組成方程組,得到:

如果兩個坐標系有3個以上的公共點,就可以按照最小二乘準則進行平差計算,得到6個坐標轉換參數的改正數進行迭代計算,根據設定的精度求算出6個坐標轉換參數。最后根據求算出的6個坐標轉換參數用式(1)求出盾尾中心和鉸接中心的實際三維坐標系坐標Pt和Pm。
下面根據鉸接中心的工程坐標和鉸接千斤頂的推進里程來推求盾首中心的工程坐標系坐標。
在標定坐標系中,得到盾尾中心與鉸接中心的距離為Smt,盾首中心與鉸接中心的距離為Shm。因此在工程坐標系中,分別計算盾尾至鉸接中心Pm的方位角α0與天頂距β0為:
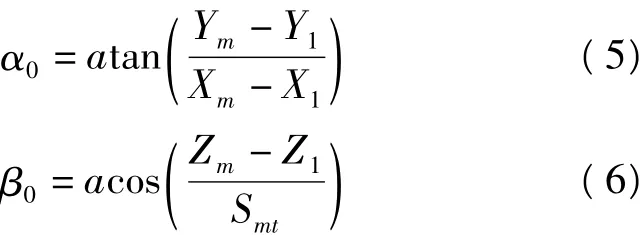
從盾構機PLC讀取鉸接千斤頂上下左右4個千斤頂的推進里程分別為Lu、La、L1、Lr,假設上下鉸接千斤頂與左右千斤頂中心對稱,他們之間的距離為D0,由此可得到鉸接中心方位角和天頂距角度的改正分別為:


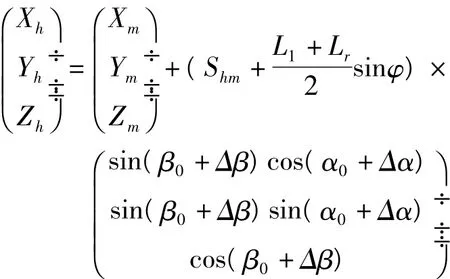
若Δα大于0,則表示前體相對于后體右轉;反之,相對于后體左轉。若Δβ大于0,則表示前體相對于后體下轉;反之,相對于后體上轉。
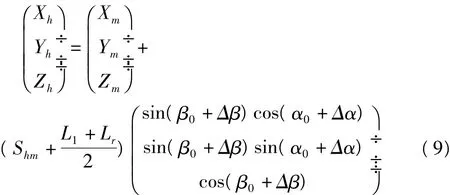
最后,求得盾首中心的工程坐標系坐標為:
2.2 精度評定
三維坐標轉換的精度對數據轉換結果的精度起著決定性的影響,其精度評定公式為:

式中,Δxi、Δyi、Δzi為測量出的實際三維坐標系的公共點坐標與求得坐標轉換參數后轉換得到的公共點的實際三維坐標系的坐標之差。N為公共點的點數,σm的值越大,表示轉換模型的精度越低,反之則精度越高。
3 算例
按照上述三維直角坐標轉換模型,筆者在杭州某地鐵施工現場,始發井盾構拼接完成后,在盾構機上焊接了3個位置適當的棱鏡,并對3個棱鏡、盾尾和鉸接中心進行了標定,測量坐標如表1所示,在鉸接盾構推進的過程中,我們用全站儀對3個棱鏡進行了觀測,所測的坐標如表2所示。
根據三維直角坐標轉換模型,用C++編寫程序,根據最小二乘準則求解坐標轉換參數,求得盾尾和鉸接中心的坐標如表3所示,PLC得到的鉸接千斤頂數據分別為0、0、0、50 mm,標定得到的盾首與鉸接中心距離為5.350 m,上下鉸接千斤頂和左右鉸接千斤頂的距離為5.170 m,推算得到的盾首、鉸接中心和盾尾坐標如表3所示,盾構姿態偏差數據如表4所示,坐標轉換精度計算見表5,根據式(10)得到點位中誤差為1.49 mm,可見三維直角坐標轉換模型的精度很高。
4 結論
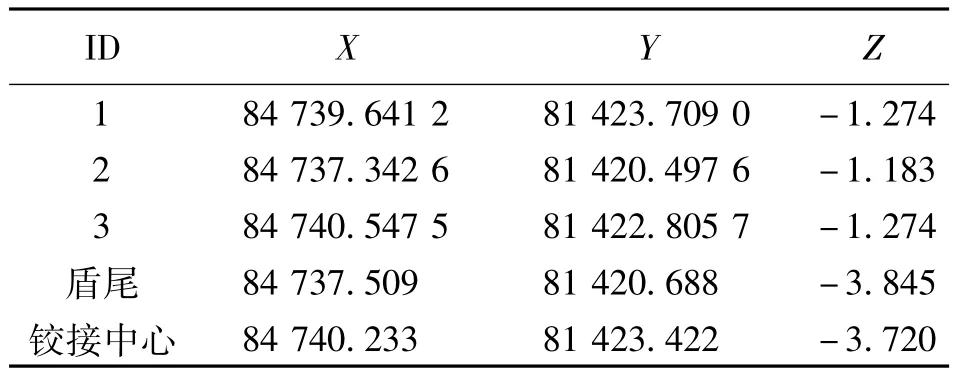
表1 盾構機拼接完成后標定的棱鏡、盾尾和鉸接中心坐標(單位:m)Tab.1 Calibrated coordinates of centres of prisma,shield tail and link after splitting joint shield(unit:m)
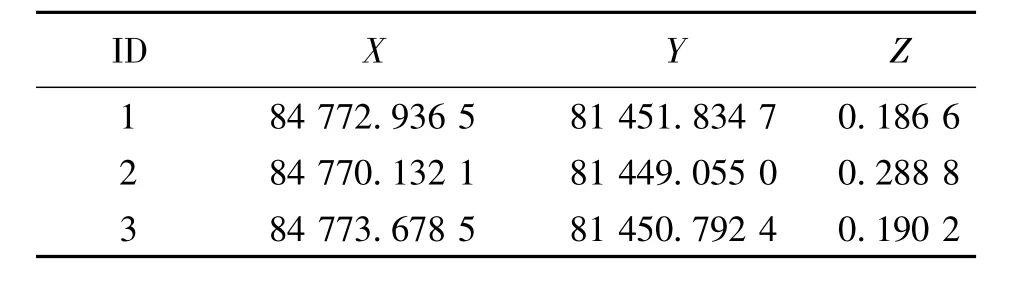
表2 盾構機推進過程中全站儀測得的棱鏡坐標(單位:m)Tab.2 Coordinates of prisma surveyed by total station in the process of shield driven(unit:m)
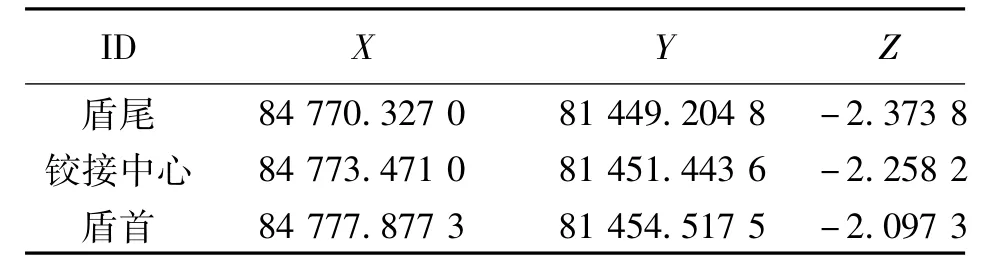
表3 計算得到的盾尾中心、鉸接中心和盾首中心坐標(單位:m)Tab.3 Calculated coordinates of centres of shield tail,link and shield head(unit:m)

表4 盾尾中心、鉸接中心和盾首中心坐標偏差(單位:cm)Tab.4 Coordinate deviation of centres of shield tail,link and shield head(unit:cm)

表5 坐標轉換的精度分析(單位:m)Tab.5 Accuracy analysis of coordinate transformation
近年來我國許多城市都在積極開展地鐵建設,但目前國內對鉸接盾構機姿態的測量還沒有一個很好的定性方法和相對應的自動導向測量系統,因此研究開發適合國內使用的鉸接盾構自動導向系統具有非常重要的意義。
本文應用三維直角坐標轉換模型,求解得到盾構機軸線局部坐標系與實際三維空間坐標系兩種坐標系之間的轉換參數,然后利用轉換參數求解出鉸接盾構機盾尾中心和鉸接中心的坐標,再由鉸接中心和得到的鉸接千斤頂推進里程推求盾首中心的實際坐標,計算盾構機的姿態。該運用在鉸接盾構中,很好地解決了實際工程難題,具有很好地發展前景和一定的研究價值。
1 潘國榮,周瑩,張德海.坐標轉換模型在盾構姿態計算中的應用[J].大地測量與地球動力學,2006,(3):84-87.(Pan Guorong,Zhou Ying and Zhang Dehai.3D datum transformation model for determining orientation of shield in subway construction[J].Journal of Geodesy and Geodynamics,2006,(3):84-87)
2 馮冬健,潘慶林,張鳳梅.地鐵盾構施工中盾構機姿態定位測量的研究[J].工程勘察,2003,5:57-58,61.(Feng Dongjian,Pan Qinglin and Zhang Fengmei.On the orientation survey of the shield in subway construction[J].Geo-Technical Investigationamp;Surveying,2003,5:57-58,61)
3 高俊強,王維.基于前后標尺法的盾構姿態測量及精度研究[J].工程勘察,2010,(1):70-72,76.(Gao Junqiang and Wang Wei.Research on shield attitude determination and accuracy based on pre and post scale method[J].Geo-Technical Investigationamp;Surveying,2010,(1):70-72, 76)
4 陳義,沈云中,劉大杰.適用于大旋轉角的三維基準轉換的一種簡便模型[J].武漢大學學報(信息科學版),2004,12(29):1 101-1 105.(Chen Yi,Shen Yunzhong and Liu Dajie.A simplified model of three dimensional-datum transformation adapted to big rotation angle[J].Geomatics and Information Science of Wuhan University,2004,12 (29):1 101-1 105)
MEASURING METHOD FOR LINK SHIELD GUIDING SYSTEM
Pan Guorong1,2),Bai Yun1)and Li Huaifeng1)
(1)Department of Surveying and Geo-informatics,Tongji University,Shanghai 200092 2)Key Laboratory of Modern Engineering Surveying,SBSM,Shanghai200092)
The relation between the local coordinate system can be solved and the practical 3D coordinate system with the 3D datum transform model,and then by using the relation between the center coordinate of shield tail and link can be obtained,finally,the coordinate of the center of shield head can be solved based on the center of link and the distance of jack.The results show satisfactory when it is used in shield guiding in practice.
3D datum transformation;link shield;seven parameters;shield attitude;shield guiding
1671-5942(2012)03-0055-04
2012-02-11
上海申通集團科研資助項目(20102604);上海市科委科研計劃項目課題(10231200302)
潘國榮,男,1960年生,教授、博士生導師,主要研究方向為精密工程測量、工業測量與測量數據處理.E-mail:pgr2@163.com
P221
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03