運動副間隙對衛星天線雙軸機構動態特性影響
2012-11-26 08:44:18潘冬王興貴趙陽
中國空間科學技術 2012年5期
關鍵詞:衛星天線
潘冬 王興貴 趙陽
(哈爾濱工業大學航天學院,哈爾濱150001)
1 引言
衛星天線雙軸驅動機構是在空間特定環境下,用來實現天線兩自由度運動與定位的專用空間機構,可以實現天線對目標的實時跟蹤、定位、伺服等多種功能。雙軸驅動機構在國內外的通信衛星和數據中繼衛星上廣泛應用[1]。
隨著航天事業發展,對衛星天線指向精度提出了更高的要求,雙軸驅動機構有運動副的存在,就不可避免地存在間隙,間隙的存在,使得機構的運動、動力學特性變得異常復雜,尤其存在內碰撞,嚴重影響機構的精度與穩定性。由于制造工藝及成本限制,通過制造精度消除間隙是不現實的,綜合分析間隙引入各因素對天線雙軸機構動態特性的影響,分析其主要影響因素、影響程度和影響規律,進而加以控制,是提高衛星天線指向精度的有效途徑。國內外學者對含間隙機構的運動學和動力學問題開展了多年的研究,并取得了豐碩的成果[2-5],但現有文獻對于衛星天線雙軸驅動機構的研究甚少,文獻[6]應用虛擬樣機技術研究了理想情況下雙軸機構運動特性,文獻[7]對雙軸機構指向精度的靜態影響因素進行了分析,對點波束天線指向計算問題進行了詳細的研究。目前,尚未見文獻對含間隙衛星天線雙軸機構指向精度動態影響因素及其影響規律進行研究。
本文以中國某高指向精度要求的衛星天線雙軸驅動機構為研究對象,分析運動副間隙及其大小、不同驅動力矩等因素對機構動力學特性的影響規律,可為衛星天線雙軸機構的結構設計與優化提供理論參考。
2 衛星天線雙軸驅動機構結構
衛星天線雙軸驅動機構分為橫向、縱向兩個完全相同的驅動軸,即俯仰軸和方位軸,每個驅動軸由驅動電機、減速器、軸承等結構組成。兩個驅動軸再加上天線本體相應支架就構成了雙軸驅動的天線系統。俯仰軸和偏航軸采用偏航-俯仰的布局形式,即偏航軸的輸出端通過連接法蘭與整個俯仰軸相連,當偏航軸電機接到驅動信號轉動時帶動整個俯仰軸及天線本體繞偏航軸轉動;俯仰軸的輸出端通過法蘭直接與天線反射面相連,俯仰軸轉動時帶動天線本體作俯仰運動,從而實現衛星天線在三維空間中的運動,并精確定位,其具體機構簡圖如圖1所示。
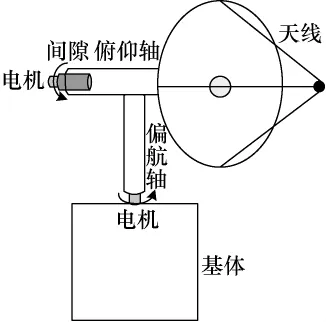
圖1 雙軸驅動機構簡圖Fig.1 Two-axis-position mechanism
3 含間隙雙軸驅動機構動力學建模
3.1 間隙運動副矢量模型
對雙軸驅動機構間隙鉸進行真實有效描述是實現衛星天線系統運動、動力學仿真的關鍵。如圖2所示,間隙矢量模型通過在軸和軸承的旋轉鉸中引入一個間隙矢量來表達旋轉鉸的真實潛在行為,間隙矢量表征軸和軸承兩構件間連接點的精確相對位置。圖2中,OXY為慣性坐標系。
間隙矢量定義在一個局部浮動笛卡爾坐標系中 (Oixiyi),以軸承的回轉中心為間隙矢量的基準起始點,間隙矢量的方向指向軸和軸承相對運動時的潛在接觸點,該潛在接觸點構成了軸與軸承的相對碰撞點對。間隙矢量的大小被嚴格限制在以軸承回轉中心為圓心且以軸和軸承的徑向尺寸公差為半徑的間隙圓內,間隙矢量大小的變化能夠反映間隙運動副元素是否接觸[8]。

圖2 運動副間隙矢量模型示意Fig.2 Sketch of vector model kinematic pair with clearance
對含間隙天線雙軸驅動機構轉動副,考慮到轉動副鉸接處軸承與軸同心,間隙大小用軸承與軸半徑之差來描述,則間隙為

式中ri為軸承的半徑;rj為軸的半徑。
3.2 間隙運動副數學模型
圖3為軸與軸承碰撞時旋轉鉸間隙示意,其中Oi和Oj分別為軸承和軸的中心;Qi和Qj分別為軸承和軸的潛在接觸點;rqi和rqj是軸承和軸潛在接觸點對在全局慣性坐標系下的位置矢量;roi和roj是軸承和軸的中心在全局慣性坐標系下的位置矢量。
由圖3可知,軸承與軸的間隙矢量為

當軸承和軸接觸碰撞時,碰撞引起的接觸變形大小可表示為


圖3 碰撞時旋轉鉸間隙示意Fig.3 Schematic diagram of revolute joints with clearance
軸和軸承是否發生碰撞可以根據接觸變形量δ來判定,軸和軸承接觸碰撞的條件為

式中δ<0表明未接觸、自由運動;δ=0表明開始接觸或開始脫離;δ>0表明接觸、發生彈性變形。
3.3 間隙運動副接觸碰撞力模型
含間隙運動副的一個重要特征就是其系統為變拓撲系統,即分為無約束的自由運動和受單邊幾何約束的運動。自由運動時機構在運動副處不受力的作用較好處理,但是當受單邊幾何約束時,運動副處將會有力的作用。為了建立系統動力學模型,需要將幾何約束轉化為力約束,利用合理碰撞力模型來預測接觸碰撞力是建立正確動力學模型的關鍵。
本文采用非線性彈簧阻尼模型來建立軸與軸承間隙接觸碰撞模型,如圖4所示,其廣義形式可表示為

式中Fn為接觸點法向接觸力;Fk為彈簧恢復力;Fd為阻尼力;Kn為等效接觸剛度;δ為接觸點法向穿透深度;為接觸點法向相對速度;C(δ)為與δ有關的阻尼因子;m為指數,且m≥1。
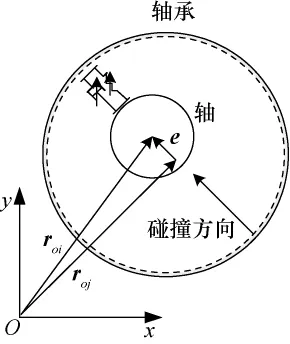
圖4 旋轉鉸非線性彈簧阻尼模型Fig.4 Nonlinear equivalent spring-damp model
3.4 間隙運動副摩擦力模型
間隙處還將存在切向摩擦力,摩擦力產生的摩擦力矩將進一步影響含間隙機構的動力學特性,求解間隙處切向摩擦力采用修正的庫倫摩擦模型,切向摩擦力可以表示為

式中μd為滑動摩擦系數;cd為動態修正系數;vt為相對切向速度。
通過上面建立的法向接觸力和切向摩擦力模型,可以較準確描述天線雙軸驅動機構間隙鉸處的約束問題,含間隙雙軸驅動機構動力學方程為

式中q為廣義坐標列陣;M、C、K、φq、F分別為雙軸驅動機構的廣義質量陣、阻尼陣、剛度陣、約束方程的雅克比矩陣、廣義速度二次項以及力陣;λ為Lagrange乘子列陣;t為時間。
3.5 衛星天線雙軸驅動機構虛擬樣機模型
對于含間隙機構動力學問題,準確檢測接觸碰撞點并進行精確求解是研究的難點。當建立了機構的動力學模型后,如何編程實現對接觸碰撞點的實時監測將很困難,而多體動力學分析軟件Adams能很好地解決這一問題。所以本文基于虛擬樣機技術,應用Adams計算平臺對含間隙衛星天線雙軸驅動機構進行仿真分析。
含間隙運動副的衛星天線雙軸驅動機構的虛擬樣機模型如圖5所示。

圖5 雙軸驅動機構虛擬樣機模型Fig.5 Virtual prototype of two-axis-position mechanism
4 仿真結果與分析
下面針對運動副間隙及其大小、不同驅動力矩等因素進行仿真分析,研究其對機構動態特性的影響規律。
4.1 間隙大小對衛星天線雙軸驅動機構影響分析
運動副間隙對雙軸驅動機構動力學特性的影響直接表現為間隙大小的影響。下面針對雙軸機構中軸與軸承間的多種間隙大小進行仿真。
圖6為不同間隙大小情況下雙軸驅動機構的動力學仿真曲線。圖6(a)表明,間隙的存在影響機構轉動的角位移,使得角位移出現偏差,且隨著時間的積累偏差逐漸增大,說明間隙對機構的穩態特性影響是個慢變過程。由圖6(b)可知,間隙的存在使機構的速度在初始階段出現波動,間隙越大,角速度波動峰值越大。圖6(c)中的角加速度曲線則表明,初始階段角加速度瞬時峰值很大,這是由于間隙的存在使間隙鉸處發生了內碰撞,間隙越大,碰撞越劇烈,隨著系統能量的消耗,逐漸趨于穩定。圖6(d)為不同間隙下鉸間接觸碰撞力,接觸碰撞力與角加速度有很大的相似性,都是隨著間隙的增大,峰值變大,且出現峰值的時間有所延遲(見圖7)。

圖6 不同間隙大小下仿真結果Fig.6 Simulation results under different clearance
通過上面的分析可以看出,間隙的存在使間隙鉸處發生內碰撞,且隨著間隙的增大,雙軸機構的角速度、角加速度在初始階段波動越劇烈,間隙對機構動態特性影響嚴重;雖然對穩態特性 (角度偏差等)影響緩慢,但隨著時間逐漸積累,勢必影響衛星天線指向精度。因此,鉸間隙對衛星天線雙軸驅動機構的穩定性及精確性都是極其不利的,應盡量減小間隙。

圖7 不同間隙大小下統計結果Fig.7 Simulation statistics results under different clearance
4.2 驅動力矩對衛星天線雙軸驅動機構影響分析
雙軸驅動機構驅動天線進行姿態機動與定位是通過橫軸和縱軸的步進電機提供轉矩實現的。為此,分析不同驅動力矩對含間隙雙軸機構動力學特性的影響。
圖8(a)、(b)分別為不同電機轉矩下雙軸機構的角位移和角速度,可以看到,隨著驅動力矩的增加,機構在相同的運行時間內轉過的角度及角速度也隨之增加;驅動力矩的變化對雙軸機構的角位移和角速度無太大影響。圖8(c)、(d)分別為雙軸機構的角加速度和間隙碰撞力,可以看出,驅動力矩增大,導致角加速度及碰撞力的峰值增大,且第一次發生碰撞的時間也有所提前(見圖9)。

圖8 不同驅動力矩下仿真結果Fig.8 Simulation results under different driving torque
通過上面的分析可知,增大驅動力矩可以使雙軸機構更快地完成天線的姿態機動任務。但是由于驅動力矩的增大,也使機構的間隙碰撞力及姿態角偏差增大,從而影響雙軸機構的穩定性,這是一個相互矛盾的過程。衛星天線的機動既要求快速性,又要求平穩性,所以需要對這兩方面因素進行綜合分析,選擇最合適的驅動轉矩。
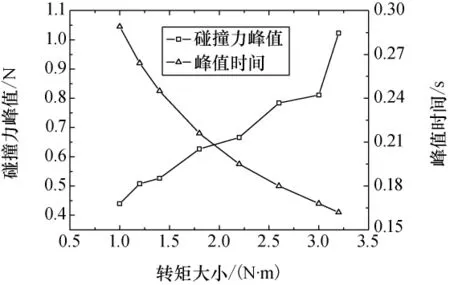
圖9 不同驅動力矩下統計結果Fig.9 Simulation statistics results under different driving torque
5 結束語
本文研究了間隙大小、不同驅動力矩等因素對間隙鉸和天線系統的動態特性影響規律。結果表明:間隙的存在將會導致鉸間的內碰撞,產生很大的碰撞力,從而影響雙軸機構的角速度、角加速度等動力學參數,并進一步影響衛星天線的定位精度。
1)間隙越大碰撞越劇烈,隨著間隙的增大,碰撞力及姿態角偏差增大,天線系統的定位精度及平穩性越差;
2)驅動力矩增大雖然能加快衛星天線的定位速度,但也將加劇內碰撞,增大姿態角偏差,影響定位精度。
因此,間隙的大小、驅動力矩等因素對衛星天線雙軸機構動力學特性都有一定的影響,且由于間隙不可避免,綜合分析各種因素對雙軸機構的影響規律,對衛星天線雙軸驅動機構進行結構優化,是減小運動副間隙對機構影響的有效途徑。
[1]馬興瑞,于登云,孫京.空間飛行器展開與驅動機構研究進展 [J].宇航學報,2006,27(6):1123-1131.MA XINGRUI,YU DENGYUN,SUN JING.The researching evolvement of spacecraft deployment and driving mechanism [J].Journal of Astronautics,2006,27(6):1123-1131.
[2]FLORES P J.Modeling and simulation of wear in revolute clearance joints in multibody systems [J].Mechanism and Machine Theory,2009,44:1211-1222.
[3]KHEMILI I,ROMDHANE L.Dynamic analysis of a flexible slider-crank mechanism with clearance [J].European Journal of Mechanics:A/Solids,2008,27:882-898.
[4]閻紹澤,陳鹿民,季林紅,等.含間隙鉸的機械多體系統動力學模型 [J].振動工程學報,2003,16(3):290-294.YAN SHAOZE,CHEN LUMIN,JI LINHONG,et al.Dynamic modeling of multibody system with clearance joints[J].Journal of Vibration Engineering,2003,16(3):290-294.
[5]王天舒,孔憲仁,王本利,等.含鉸間間隙的航天器附件展開過程分析 [J].哈爾濱工業大學學報,2001,33(3):283-286.WANG TIANSHU,KONG XIANREN,WANG BENLI,et al.Analysis of deployment of spacecraft appendages with hinge gap [J].Journal of Harbin Institute of Technology,2001,33(3):283-286.
[6]廖英,李長江,馮向軍,等.基于Pro/E的雙軸定位機構虛擬樣機的建模與校核 [J].上海航天,2006(5):59-64.LIAO YING,LI CHANGJIANG,FENG XIANGJUN,et al.Simulation and verification to the virtual prototype of two-axis-position structure based on Pro/E [J].Aerospace Shanghai,2006(5):59-64.
[7]孫京,馬興瑞,于登云.星載天線雙軸定位機構指向精度分析 [J].宇航學報,2007,28(3):545-550.SUN JING,MA XINGRUI,YU DENGYUN.Pointing accuracy analyses of a satellitic two-axes antenna pointing mechanism [J].Journal of Astronautics,2007,28(3):545-550.
[8]時兵,金燁.面向虛擬樣機的機構間隙旋轉鉸建模與動力學仿真 [J].機械工程學報,2009,45(4):299-303.SHI BING,JIN YE.Dynamic simulation and modeling of revolute clearance joint for virtual prototyping [J].Journal of Mechanical Engineering,2009,45(4):299-303.
猜你喜歡
科技傳播(2019年22期)2020-01-14 03:06:28
同濟大學學報(自然科學版)(2018年10期)2018-11-02 07:17:24
北京航空航天大學學報(2017年5期)2017-11-23 05:54:08
移動信息(2016年9期)2016-12-31 09:31:33
北京航空航天大學學報(2016年12期)2016-02-27 06:32:37
衛星與網絡(2016年12期)2016-02-05 09:23:28
西部廣播電視(2015年7期)2016-01-16 03:45:17
科技傳播(2015年16期)2015-10-24 20:03:06
科教導刊(2015年21期)2015-08-05 16:51:05
衛星與網絡(2013年1期)2013-06-05 08:21:58