球鉸接桿式支撐臂構型參數分析
2012-11-26 10:50:44黎彪劉志全程剛丁鋒
中國空間科學技術 2012年2期
關鍵詞:質量
黎彪 劉志全 程剛 丁鋒
(中國空間技術研究院,北京100094)
1 引言
構架式空間可展開支撐臂是目前最為先進的支撐臂之一,球鉸接桿式支撐臂因高剛度、大尺寸等優點而更能適應航天器大型化發展,是未來空間可展開支撐臂的主要發展方向[1]。目前國內已研制出的球鉸接桿式支撐臂原理樣機成功地實現了支撐臂的展開和收攏功能[2-3],然而,將其應用于航天任務中還需要考慮質量、環境適應性、收攏包絡等諸多約束,這些約束都與支撐臂的構型參數密切相關。因此,深入研究球鉸接桿式支撐臂構型參數對性能的影響對于此類支撐臂在航天器工程中的應用具有重要意義。
國內外對于球鉸接桿支撐臂構型參數分析大多基于等效梁理論,文獻[4]從剛度和強度方面分析了各構型參數對盤壓桿和鉸接桿式支撐臂性能的影響,但該文獻對鉸鏈因素只是采用經驗系數修正,并只討論了不含套筒的支撐臂。文獻[5]同樣采用等效梁理論,推導了支撐臂的彎曲剛度、強度與支撐臂套筒半徑和縱梁截面面積之間的關系,但文獻中未考慮跨距、鉸鏈和斜拉索組件等因素。本文采用有限元分析軟件(ANSYS)對球鉸接桿進行有限元建模,并引入了球鉸接副剛度、由套筒附加的質量和結構尺寸以及橫向框架邊數等因素,并在此基礎上進行各構型參數的影響分析。
2 球鉸接桿式支撐臂組成及構型參數
以ADAM(Able Deployable Articulated Mast)為代表的球鉸接桿式支撐臂的組成如圖1所示,兩相鄰橫向框架之間的構件組成一個單元段,縱梁通過兩端的球鉸與上下橫向框架相連,在橫向框架每個角點處設有導向輪,以保證支撐臂能夠在套筒的導軌中(圖1中未反映)順利展開,機構完全展開后每個側面都有斜拉索組件,斜拉索組件主要包括鎖定裝置和斜拉索,用于保持展開后的結構穩定和剛度。
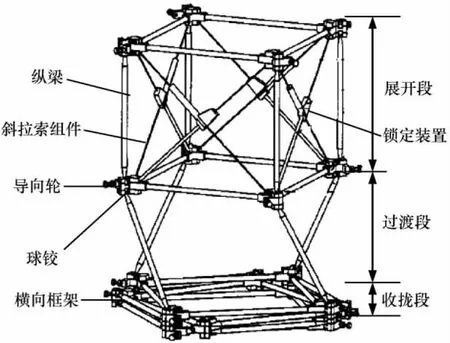
圖1 球鉸接桿式支撐臂的組成Fig.1 ADAM-type articulated mast components
球鉸接桿式支撐臂單元段收攏狀態如圖2所示,縱梁AA1,BB1,CC1,DD1側向倒伏,相鄰橫向框架ABCD與A1B1C1D1之間相對轉角為θ。工程實際中支撐臂將收攏在套筒中,圖1中完全展開的展開段單元由提升螺母驅動沿著直導軌被推出套筒,而過渡段的單元段由完全展開的單元段牽引,沿著曲線導軌螺旋上升,上下橫向框架相對轉動θ/2角度,實現了半展開,而收攏段的單元段儲存在套筒根部。
球鉸接桿式支撐臂構型參數包括:支撐臂完全展開后總長度Ltot,單元段的數量N,單元段跨距即縱梁長度Lbay,橫向框架邊數M,橫向框架外接圓半徑R(可近似為套筒半徑,下文統一稱R為套筒半徑),橫向框架桿件邊長l,收攏時兩相鄰橫向框架相對轉角θ,縱梁的內外管徑尺寸rli、rlo,橫向框架桿件的內外管徑rhi、rho,斜拉索的預緊力T。各參數之間的關系如下:
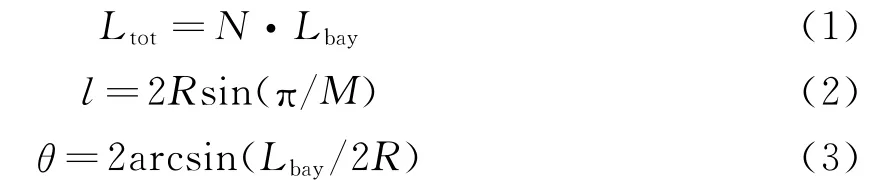
支撐臂收攏長度為

則無套筒的支撐臂的收攏率 (支撐臂收攏時縱向長度與完全展開時長度比值)為


圖2 單元段收攏狀態Fig.2 Stack of mast bay
由于N很大,式(5)中1/N一項可以忽略,則收攏率可簡化為ε=2rho/Lbay。
支撐臂在發射過程中收攏在套筒中,因此其收攏后總長度等于套筒的長度。收攏段有N-2個單元段,其長度為

過渡段包含一個半展開狀態的單元段,即單元段橫向框架相對旋轉角度為θ/2,其長度為

展開段為一個單元段長度,則套筒長度即支撐臂收攏總長度為

則航天任務中的支撐臂收攏率為

選取線密度(單位長度的支撐臂質量)作為衡量支撐臂質量優劣的標準,包含套筒質量的支撐臂總線密度為λ1=(Mmast+Mcan)/Lcan,其中,Mmast為支撐臂機構的總質量,Mcan為套筒的質量。而不包含套筒質量的支撐臂線密度則為λ2=Mmast/Lcan。
3 球鉸接桿式支撐臂有限元建模與驗證
利用ANSYS對球鉸接桿進行有限元建模。對于縱梁的單元選擇,文獻[6]對比了采用桿單元和梁單元分析結果,指出兩者所得的頻率基本相同。因此,為簡化問題,本文采用桿單元(LINK8)模擬縱梁;采用管單元(PIPE16)模擬橫向框架;采用點質量單元(MASS21)模擬縱梁與橫向框架連接處的導向輪和球鉸組件,對于電纜等附件質量和頂端負載質量,也采用均勻分布在角節點處的點單元(MASS21)模擬;采用索單元(LINK10)模擬斜拉索,該單元能夠模擬斜拉索不同預緊力對結構性能的影響;采用COMBIN7單元模擬球鉸,該單元剛度參數與斜拉索預緊力相關。
為驗證模型的合理性,設計并制造了幾何參數與ADAM桿一致的六單元段球鉸接桿式支撐臂試驗件,并對試驗件進行了模態試驗,對比ANSYS有限元模型分析值和模態試驗值,如表1所示,分析值與試驗值的誤差在3%以內,屬于可接受范圍內,表明有限元模型合理。

表1 試驗件模態試驗結果與有限元分析結果對比Tab.1 Comparison between modal analysis test and FEM analysis result
4 ADAM桿構型參數對支撐臂性能影響
采用相同的方法,對ADAM桿進行了有限元建模,ADAM桿末端支撐載荷為360kg,電纜等附件質量為200kg[7]。ADAM桿由87個單元段構成,套筒半徑為0.56m,縱梁長度為0.7m。
本文主要關注支撐臂的總體構型,分析單元段跨距Lbay、套筒半徑R、橫向框架邊數M和斜拉索預緊力T等參數對支撐臂線密度λ1和λ2、一階彎曲固有頻率f1和收攏率ε′的影響,本文未對縱梁和橫向框架的管徑進行分析,對管徑的研究可參考文獻[8]。
4.1 單元段跨距Lbay
為保證套筒中過渡段導軌不相互干涉,跨距必須滿足

單元段跨距對支撐臂結構性能的影響如圖3所示,由圖3(a)可知單元段跨距為0.1~0.6m時,線密度λ1從48kg/m急劇降至16.1kg/m,而單元段跨距大于0.6m之后,隨著單元段跨距的增加,λ1的下降不顯著,到跨距最大允許尺寸時λ1為15.8kg/m。而λ2在跨距增加到0.6m時,線密度從19.6kg/m迅速降至7.6kg/m,隨后穩定在7.4kg/m左右。其原因是當跨距很小時,單元段的數目太多,由此附加的導向輪、球鉸組件、橫向框架和鎖定裝置的數量也很多,這極大地增加了整個系統的質量,而當跨距大于0.6m后,單元段的數目變化不大,支撐臂的質量變化幅度很小。
由圖3(b)可知,跨距大于0.6m之后,支撐臂的一階彎曲固有頻率f1從0.085Hz增加到了0.09Hz。這是因為單元段的減少相應地減少了球鉸副數量,降低了鉸鏈對支撐臂剛度的削弱作用,另外質量的下降也使支撐臂剛度有一定程度的提高。
從圖3(b)支撐臂收攏率ε′變化曲線得出,增加跨距能夠減小收攏后的長度,最小收攏率約為4%,并由式(4)、(6)、(7)可知收攏率與跨距之間近似于反比例函數,這與仿真結果相符。
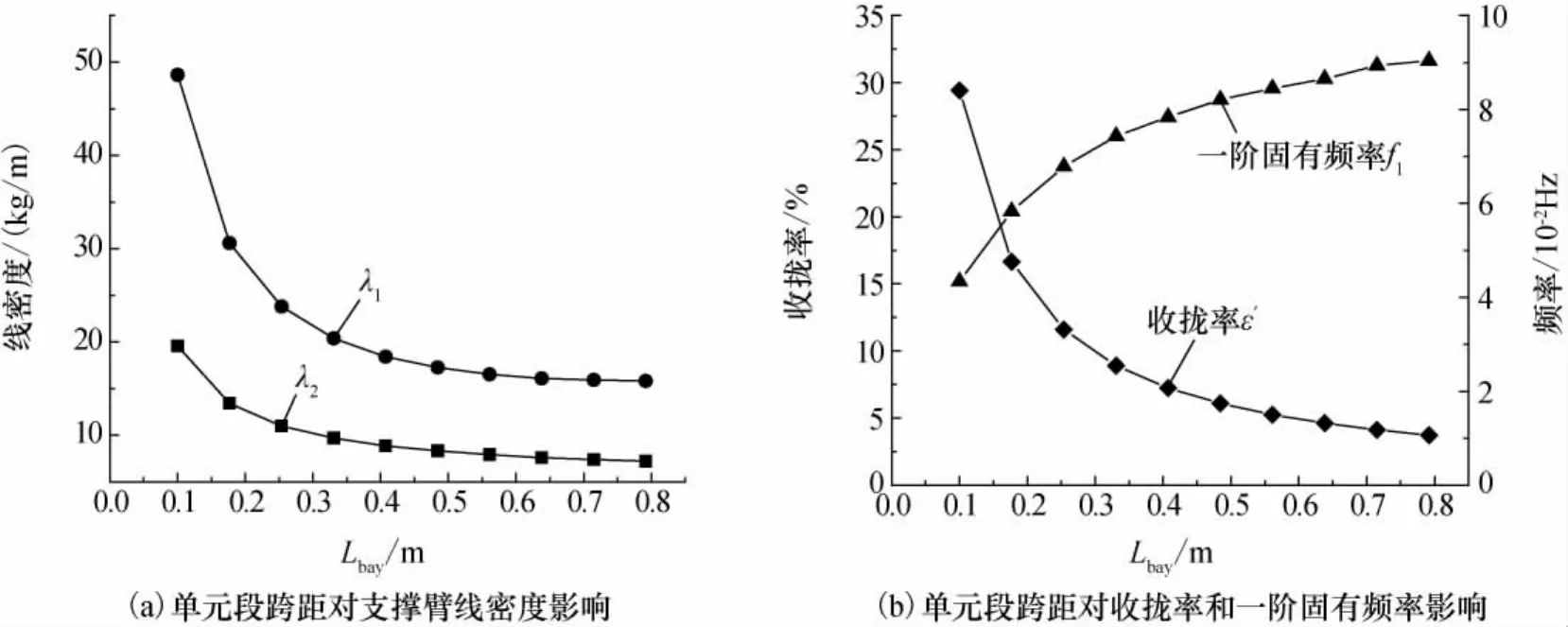
圖3 單元段跨距對支撐臂性能影響Fig.3 Effect of bay length on mast performance
4.2 套筒半徑R
由式(7)可知,套筒半徑的變化不會改變支撐臂的收攏率。由圖4可知,隨著套筒半徑增加,λ2變化不大,僅從7.4kg/m增加到8.0kg/m;而λ1從14.9kg/m增加到23.0kg/m。可見隨套筒半徑增加,支撐臂的總質量增加主要來自于套筒部件,這是因為支撐臂桿件由輕質復合材料制成,而套筒材料為鋁合金。
由圖4可知支撐臂的一階彎曲固有頻率與套筒半徑之間的關系近似為線性,這與采用簡單梁理論推導的彎曲剛度[4]式(9)和懸臂梁的彎曲剛度式(10)[3]相吻合。

圖4 套筒半徑對支撐臂結構性能的影響Fig.4 Effect of boom radius on mast performance

式中E為材料的彈性模量;Ⅰ為慣性矩;EⅠ為梁的彎曲剛度;C為鉸鏈副對剛度削弱系數;Al為單根縱梁橫截面面積;m為懸臂梁質量;h為懸臂梁的長度。
4.3 橫向框架邊數M
從圖5可知橫向框架的邊數增加會造成支撐臂的線密度λ1、λ2的增加,同時使支撐臂的剛度增大,這與式(9)相吻合。而從可靠性的角度考慮,邊數增加勢必會增加球鉸、導向輪和鎖定裝置等附件的數目,這將降低支撐臂的可靠性。并且,由式(2)、式(8)可知增加邊數會減小縱梁的最大允許長度,這會對支撐臂的總質量和剛度等方面造成不利影響。
4.4 斜拉索預緊力T
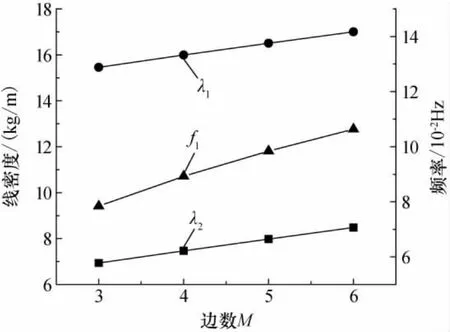
圖5 橫向框架邊數對支撐臂性能影響Fig.5 Effect of side of cross-sections on mast performance
斜拉索的預緊力能夠減小球鉸接副的間隙,使球鉸中面面貼合更緊密,提高鉸鏈的剛度。因此,為了保證工作過程中支撐臂的根部球鉸中面面始終貼合 (如圖6所示,圖中符號A、B、C、D和A1、B1、C1、D1與圖2中對應的字母含義一致),須滿足

式中P為根部球鉸副拉力;J為支撐臂繞B點的轉動慣量;ξ為最大角加速度;mtip為末端負載的質量。
由于支撐臂的對稱性,僅分析根部鉸鏈A處,從圖6可知:

由式(11)、(12)可推出為保證ADAM桿根部球鉸中面面始終貼合的斜拉索最小允許預緊力為

由式(13)可以看出,斜拉索最小允許預緊力Tmin與sinα成反比,根據圖6對角度α的定義可知,當橫向框架桿件長度一定時,增加縱梁長度能夠減小斜拉索的最小預緊力。
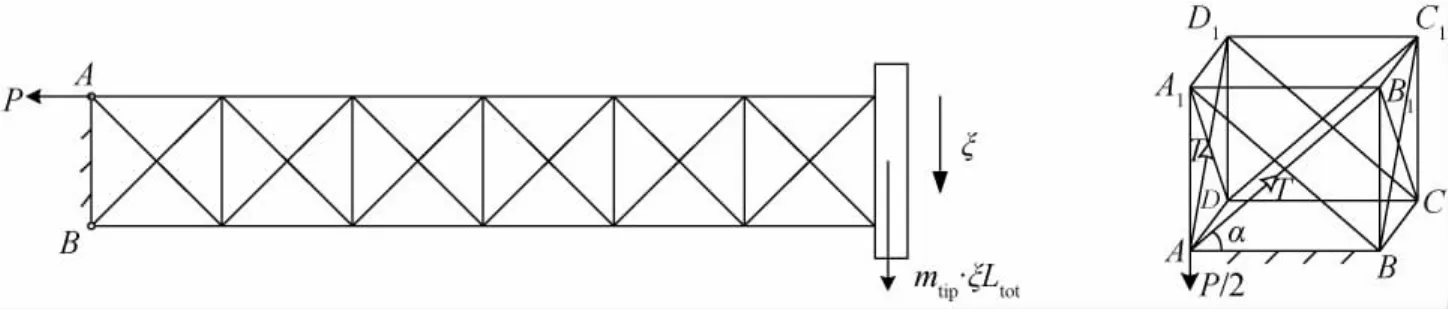
圖6 斜拉索最小允許預緊力分析Fig.6 Analysis of allowable minimal preload for diagonal cables
由于球鉸副接觸部分的復雜非線性,目前還沒有合適的解析模型。為研究斜拉索預緊力對支撐臂剛度的影響,進行了兩個分析:第一種,假定球鉸接副的剛度恒定,不隨斜拉索預緊力變化;第二種,假定球鉸接副的剛度與斜拉索預緊力相關,當預緊力數值較小時,剛度隨預緊力增加而變大,而當剛度增加到某一閾值時將不再增加。
假定球鉸接副剛度恒定時,如圖7(a)所示,支撐臂的一階彎曲頻率f1和一階扭轉頻率f3都略有下降,原因是預緊力的存在相當于對支撐臂施加了一個壓縮力,削弱了系統的剛度,而預緊力愈大對支撐臂剛度的削弱效果越顯著。
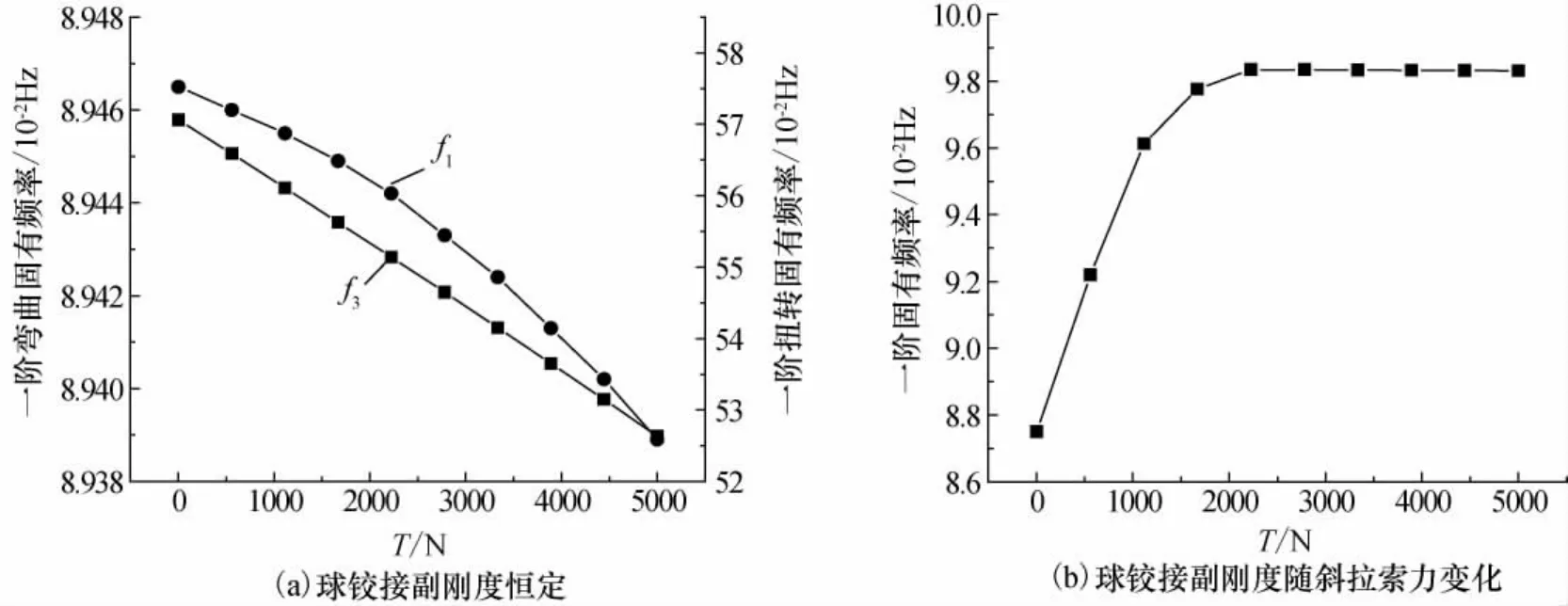
圖7 斜拉索預緊力對支撐臂剛度影響Fig.7 Effect of preload of diagonal cables on mast stiffness
在第二種假定條件下,當斜拉索預緊力從300N增加到2 000N時,球鉸接副剛度與預緊力呈線性關系,由1×108N/m增加到1×1010N/m,而斜拉索預緊力從2 000N增加到5 000N時,球鉸接副剛度由1×1010N/m線性增加到2×1010N/m。則支撐臂的一階彎曲固有頻率f1變化曲線如圖7(b)所示,最開始時隨著預緊力的增加,f1也隨之增加,這是因為在此階段增大預緊力能提高球鉸接副的剛度,也就提高了支撐臂整體的剛度;而當鉸接副的剛度達到最大值后,預緊力繼續增加會使f1降低,但下降幅度不大,其原因是當預緊力超過某一閾值后,預緊力對支撐臂的壓縮效應將大于其消除間隙的效應,導致了支撐臂剛度的降低。由此可知,斜拉索預緊力取值應從最小預緊力Tmin和球鉸副取得最大剛度值時對應的預緊力中選取較大值。
5 結束語
1)球鉸接桿式支撐臂單元段跨距應小于橫向框架桿件長度,ADAM桿跨距的優選范圍在0.6~0.8m,增大單元段跨距能夠降低系統總質量、提高展開后支撐臂的一階彎曲固有頻率、減小收攏長度和降低斜拉索最小預緊力要求。
2)支撐臂的總質量、一階彎曲固有頻率與套筒半徑近似線性關系,都隨套筒半徑的增加而變大。而套筒半徑增加時,支撐臂總質量的增加主要來源于套筒部件。
3)增加橫向框架邊數能提高支撐臂剛度,但同時會減小縱梁長度的最大允許值,因此,橫向框架邊數的選取需要進一步研究。
4)工程應用中,斜拉索預緊力取值應從最小預緊力和球鉸副取得最大剛度值時對應的預緊力兩者中選取較大值。
[1]劉志全,黎彪,程剛.構架式空間可展開支撐臂 [J].中國空間科學技術,2011,31(2):32-38.LIU ZHIQUAN,LI BIAO,CHENG GANG.Review of deployable-truss mast for space application [J].Chinese Space Science and Technology,2011,31(2):32-38.
[2]劉榮強,郭宏偉,鄧宗全.空間索桿鉸接式伸展臂設計與試驗研究 [J].宇航學報,2009,30(1):315-320.LIU RONGQIANG,GUO HONGWEI,DENG ZONGQUAN.Space cable-strut deployable articulated mast design and experimental study [J].Journal of Astronautics,2009,30(1):315-320.
[3]蘇斌,關富玲,石衛華,等.索桿式伸展臂的結構設計與分析 [J].工程設計學報,2003,10(5):287-294.SU BIN,GUAN FULING,SHI WEIHUA,et al.Design and analysis of rod-cable deployable mast[J].Journal of Engineering Design,2003,10(5):287-294.
[4]CRAWFORD R F.Strength and efficiency of deployable booms for space applications [C].California:AAS/AIAA Variable Geometry and Expandable Structures Conference,1971.
[5]郭宏偉,劉榮強,鄧宗全.空間索桿鉸接式伸展臂性能參數分析與設計 [J].北京航空航天大學學報,2008,34(10):1186-1190.GUO HONGWEI,LIU RONGQIANG,DENG ZONGQUAN.Performance parameters analysis and design of space cable-strut deployable articulated mast [J].Journal of Beijing University of Aeronautics and Astronautics,2008,34(10):1186-1190.
[6]司洪偉.大撓性航天桁架結構動力學建模及其主動模糊控制研究 [D].長沙:國防科學技術大學,2006.SI HONGWEI.Dynamics modeling and active fuzzy control study for large flexible space truss [D].Changsha:National University of Defense Technology,2006.
[7]SRTM hardware——the mast:payload bay [EB/OL].Shuttle press kit,2000-01-18.http://www.shuttlepresskit.com/sts-99/payload57.htm.
[8]HORTA LUCAS G,WALSH JOANNE L,HORNER GARNETT C.Analysis and simulation of the mast[R].Virginia:NASA-N87-16046,1987.
猜你喜歡
中學生數理化·中考版(2022年10期)2022-11-10 09:37:42
中學生數理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(2018年6期)2018-04-22 03:16:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中學生數理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54