數控機床用直線電機伺服試驗平臺開發及應用
2012-11-30 06:13:50汪木蘭張崇巍
中國機械工程 2012年3期
汪木蘭 張崇巍 林 健 潘 超
1.合肥工業大學,合肥,2300092.南京工程學院先進數控技術江蘇省高校重點建設實驗室,南京,2111673.江蘇大學,鎮江,212013
0 引言
數控機床正在向高速、精密、復合、智能的方向發展,由此也對伺服進給控制系統提出了更高的要求:優良的動態特性,更高的進給速度和控制精度,更低的振動噪聲。傳統的“旋轉電機”伺服傳動鏈比較長,因而導致出現如下技術問題:機械剛度低,難以獲得大的進給速度和大的加速度;傳動誤差較大;機械噪聲大,傳動效率低。雖然通過不斷改進使其傳動性能有所提高,但上述問題很難從根本上得以解決,于是,直線驅動伺服技術應運而生。由于直線驅動伺服技術消除了傳統機械傳動鏈所帶來的一系列不良影響,提高了進給系統的伺服精度和快速性能,因而成為新一代數控機床中最具代表性的先進直驅技術之一。
直線電機具有其獨特的優點,但應用于數控機床中仍有一些特殊技術問題需要解決。例如,直線電機因其獨特的結構會存在端部效應,從而引起推力波動;直線電機“零傳動”方式使得各種負載擾動、內部擾動和外部擾動等都不經過任何中間環節衰減直接作用在直線電機上,增大了伺服控制難度;直線電機應用于高精密機床時,其選型和防磁、配套光柵尺安裝和防護、端部效應造成推力特性發生變化等都會影響系統精度。為了充分發揮直線電機的優勢,需要對上述應用過程中遇到的技術問題和直線電機伺服系統的動態特性展開深入研究。
1 數控機床用直線伺服系統特性分析
伺服進給系統的穩定性、快速響應性,以及跟蹤誤差和穩態精度等性能指標是數控機床機械加工性能的決定因素,這些因素確定了機床可以達到的最大進給加速度、最大進給速度、定位精度、零件加工輪廓誤差和表面質量等。
傳統伺服系統由“旋轉式”伺服電機和機械傳動鏈兩部分組成,但直線進給伺服系統省去了機械傳動部分,因此其動態特性與傳統伺服系統有所差別。文獻[1]根據直接驅動進給伺服系統的數學模型,分析了高速大推力直線電機驅動進給系統動態剛度的計算方法和其主要影響因素,并提出了提高動態性能的措施。文獻[2]應用等效磁場電路和有限元方法,分析了直線電機的空氣間隙磁場密度以及其靜態特性。文獻[3]通過仿真分析研究了高速型長初級直線感應電機的動態性能,分析了電壓、電流、壓頻比、功率因數等參數與推力、負載之間的關系。文獻[4]通過對繞組函數進行擴展,分析了偶數極、奇數極、不均勻氣隙等因素對直線異步電機電感等參數以及推力和法向力的影響。文獻[5]采用有限元法,建立了永磁直線電機模型,對初級線圈與次級線圈、次級線圈與機床間的兩種法向吸力進行了詳細分析,并運用補償措施減小了法向吸力在推力波動、機械裝配和機床隔磁等方面的負面影響。文獻[6]通過有限元方法建立了精密雙層氣浮直線電機的有限元模型,應用模態疊加法分析了該系統在各種條件下的動力學響應,得到了X、Y、Z三個方向的加速度響應曲線。
2 直線伺服進給系統的先進控制策略
直線電機應用于高精度的數控加工領域時,必須考慮負載變化、各種非線性環節、運行狀況改變等不確定因素的影響,直接建立電機在實際應用狀態下動態和穩態的精確數學模型非常困難,因此,在選取控制方法時,既要顧及對象模型的結構和參數,又要考慮到模型攝動、負載擾動等不確定性因素對系統穩定性和抗擾能力的影響。
文獻[7]為周期性的推力波動建立了基于傅里葉序列的近似數學模型,并進行了前饋補償控制。文獻[8]采用不依賴于模型的非線性擴張狀態觀測器(nonlinear extended state observer,NESO)對擾動進行了辨識,并通過前饋方式對推力波動進行了補償。文獻[9]設計了H∞魯棒控制算法來減小由切削力引起的跟蹤誤差。文獻[10]根據直線電機驅動數控機床往復運動特性,采用重復控制策略減小進給系統跟蹤誤差。文獻[11]采用極點配置法研究了直線電機驅動伺服系統的動態性能。文獻[12]設計了魯棒自適應控制器以實現負載擾動的補償控制。文獻[13]采用神經網絡對直線電機模型的不確定性和擾動進行了建模和補償,取得了較好的效果。特別針對靜態映射的多層前饋神經網絡無法直接獲得動態性能描述的不足,選取了動態遞歸Elman神經網絡通過延時反饋捕捉動態響應,使其具有映射動態特性和適應時變特性的功能,比前饋神經網絡更適合對直線電機的擾動進行動態描述和補償。然后基于Elman神經網絡,設計了“反饋+前饋”綜合補償方案,即對各種擾動進行動態反饋補償,而對速度給定信號進行預見前饋補償,避免了傳統前饋控制中對閉環傳遞函數的求解,從而在提高伺服系統響應速度的同時也滿足了伺服系統跟蹤精度,神經網絡結構還可以根據需要進行動態調整,具有較好的魯棒性。
總之,近年來研究者們提出的直線電機驅動數控機床伺服系統控制策略概括起來可分為:經典控制法、滑模控制法、自適應控制法、魯棒控制法、自抗擾控制法、復合控制法和智能控制法等。根據應用場合和性能指標合理選擇,可達到要求的控制指標。
在研究先進控制策略的同時,直線伺服系統定位誤差測量、建模和綜合補償技術也是值得關注的重點。在保證電氣控制系統和機械裝置具有一定精度的前提下,通過軟件實現綜合誤差補償,可提高伺服系統定位精度,且更為經濟有效。誤差補償技術首先采用激光干涉儀等精密儀器對工作臺的行程范圍進行全程標定,測量若干位置的定位誤差值,然后進行誤差分析和建模,預先計算出工件加工點的空間位置誤差,加工時根據位置給定信號讀取對應的誤差值,通過改變坐標驅動量來實現誤差修正,從而提高機床定位精度。
3 數控機床用直線電機伺服試驗平臺
3.1 動態特性試驗系統的構建
筆者根據數控機床用直線電機的性能要求,設計研制了一個綜合試驗系統,如圖1所示。直線電機選用美國Kollmorgen公司生產的IC22-050A2P1系列組件,按照產品手冊需求配置了動子(IC22-050A2P1)、磁鋼(MC050-0512)、直線導軌(REXROTL)、驅動器(CB10560-000000)和附件(霍爾元件、電纜)等。組裝成形后的整機外形長度約為2000mm,凈行程約為1800mm。
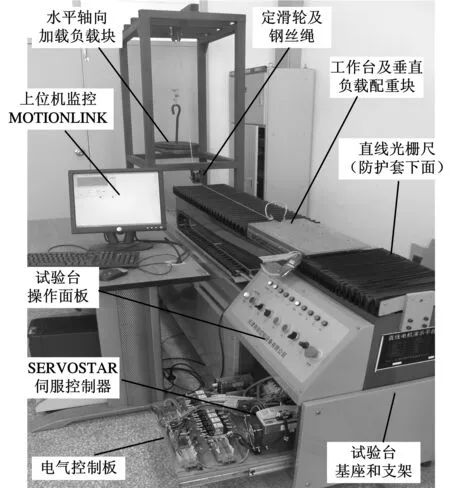
圖1 數控機床用直線電機驅動伺服試驗系統
綜合試驗系統中重要的直線位移傳感用精密直光柵選擇了德國HEIDEHAIN公司生產的帶鋼組件包,具體包括光柵尺(LIDA405ML1840-LIDA485)、支架、讀頭(LIDA48)和配套的信號電纜(3M/帶15針D-sub)等。
Kollmorgen直線電機伺服驅動器輸入電源為:三相交流230V/115V、50Hz。相應的外部接口包括:RS-232C通信接口(C1)、反饋傳感器信號接口(C2)、開關量I/O接口(C3)、等效編碼器輸出接口(C4)以及數字顯示器接口等。用戶可以根據顯示器的顯示判斷相應的運行狀態。
綜合試驗臺基座部分采用HT200樹脂砂鑄造而成,質量約300kg,能夠滿足高速動態運行的剛度要求,并且保持整個試驗平臺平穩和牢固。
3.2 調試監測軟件和試驗研究
本直線電機試驗平臺所配Kollmorgen伺服驅動器(SERVOSTAR CD系列)提供了一個功能齊全、性能先進的參數設置和在線調試仿真軟件——MOTIONLINK。該軟件與伺服放大器之間通過RS-232C串口通信連接,并配有相應的輸入參數畫面、輸出結果數據及圖形顯示畫面,通過友好的交互菜單對伺服系統進行參數設置和性能監控。
直線電機驅動進給伺服系統的設置包括電源設置、電機類型選擇、控制方式選擇、負載辨識確定和數據保存等五個基本步驟。監測結果數據可以導入Excel計算表格,用于后期的數據統計和性能分析。Kollmorgen SERVOSTAR CD驅動器提供三種經典的控制方式供用戶選擇,分別為PI控制法、PDFF控制法和標準極點配置控制法。
MOTIONLINK軟件具有的PC Scope功能可對直線電機運動過程進行參數設置和監測,最多可以同時監測三個系統參數,并能夠對直線伺服系統的動態過程在上位機上進行圖形化直觀顯示,圖2所示即為MOTIONLINK軟件對直線電機速度給定量、實際速度檢測值和電流值進行監測的顯示結果。
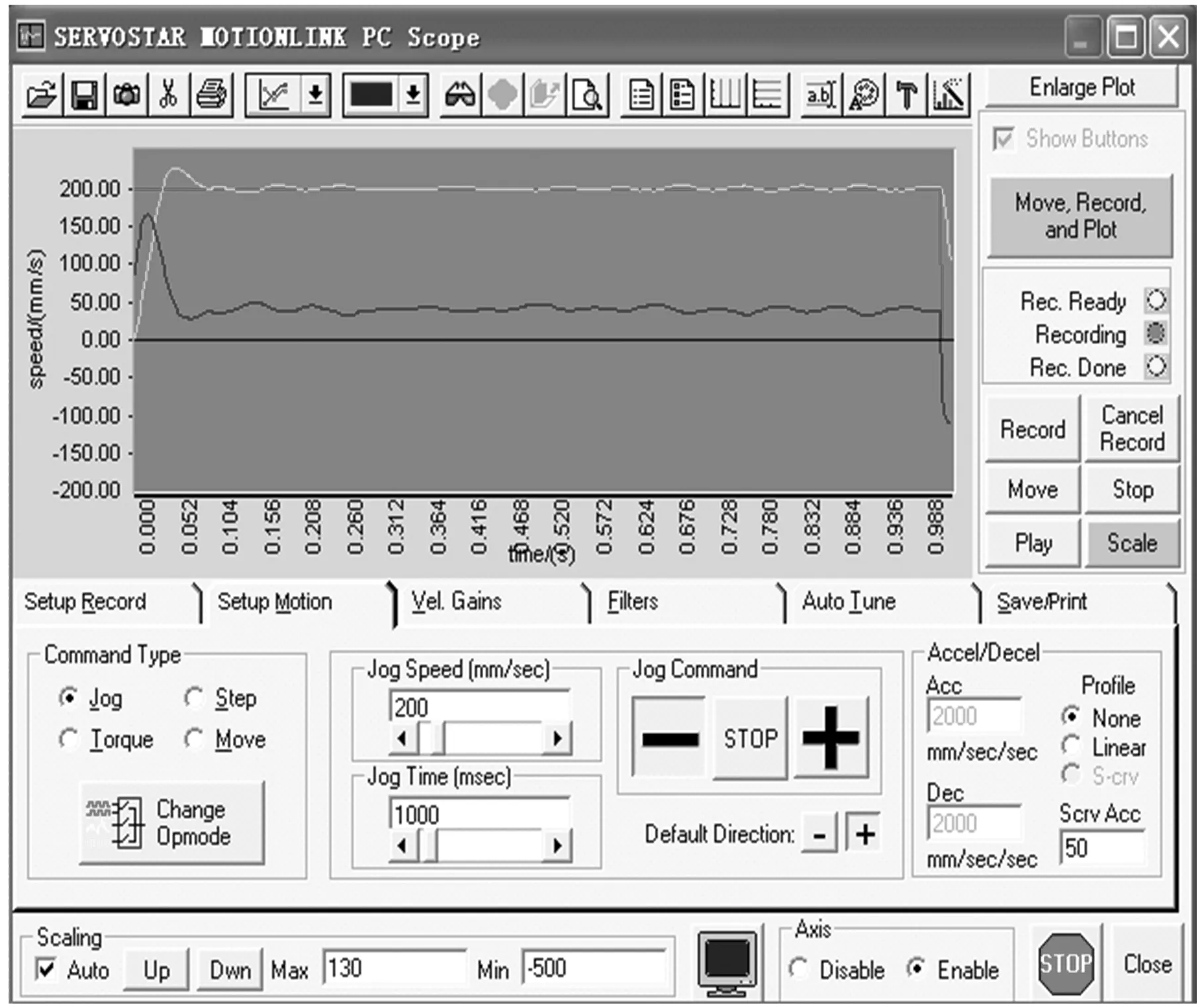
圖2 直線電機伺服系統運行實時監控畫面
3.3 直線電機驅動伺服單元建模
Kollmorgen SERVOSTAR CD系列直線電機配用的伺服驅動器采用了高性能的DSP微處理器芯片,其工作頻率為40MHz。系統閉環回路速度帶寬最大為400Hz,速度調節誤差小于0.01%,PWM開關頻率為8kHz,電機電流脈動頻率為16kHz,位置回路刷新時間(頻率)為500μs(2kHz),速度回路刷新時間(頻率)為250μs(4kHz),SVM電流回路刷新時間(頻率)為62.5μs(16kHz),通信數據刷新時間(頻率)為62.5μs(16kHz)。伺服系統位置檢測采用HEIDEHAIN公司生產的高精度敞開式光柵尺LIDA,其位移檢測精度為±5μm。
直線電機參數如下:峰值推力Fp=1250N;持續推力Fc=548N;峰值電流Ip=22A;持續電流Ic=8.7A;電阻Rs=1.3Ω;電感L=0.0134H;反電勢常數Ke=51.4V·s/m;推力系數kf=63N/A;動子質量m=6.9kg;極距τ=0.032m;電氣時間常數Tl=10.1ms;最大理論加速度am=18.5g;最大允許線圈溫度Tm=130℃;黏滯阻尼系數B=0.2N·s/m。
針對本綜合試驗系統所選用的永磁直線同步電機,取永磁體基波勵磁磁場軸線(磁極軸線)為d軸(直軸),順著動子運動方向超前90°電角度為q軸(交軸),d-q軸系以電角度ωr隨同動子一起運行,它的空間以d軸與A軸間的電角度θr來確定。推導出永磁直線同步電機(permanent magnet linear synchronous motor,PMLSM)的d-q軸模型中電壓平衡方程式及磁鏈方程分別為
(1)
式中,Rs為動子電阻;Ud、Uq為動子d、q軸電樞電壓;id、iq為動子d、q軸電樞電流;v為動子速度;Ld、Lq為動子d、q軸電樞電感;ψd、ψq為動子d、q軸磁鏈;τ為極距;ψPM為定子永磁體勵磁磁鏈;p為微分算子。
在理想情況下,PMLSM電磁推力Fe可表示為
(2)
如果對PMLSM進行矢量控制,使動子電流矢量與定子永磁體磁場在空間正交,即令id=0,則直線電機電磁推力Fe只與iq成正比,即
(3)
如果不計端部效應產生的等效阻力,則直線電機的運動方程可以表示為
(4)
式中,Fl為負載阻力;m為直線電機動子及所帶負載的總質量。
為了嵌入自行開發設計和提出的先進控制策略,可以通過參數設置斷開SERVOSTAR伺服放大器內部的閉環回路,再利用自行設計開發的試驗板通過RS-232C接口發出控制命令,同時根據通信協議讀回伺服驅動器中有關參數和過程變量值,并由開發板中DSP上傳給上位計算機予以保存和統計分析。
由于SERVOSTAR伺服放大器既能夠實時接收模擬命令或者數字命令,也可以通過RS-232C接收約定的數據包(含命令或數據等),故而這種多通道接口的構造形式,很容易實現該伺服放大器與開發試驗板或其他裝置之間的順利對接。
這里雖然采用了串行通信方式交換命令和數據,但由于通信數據包的刷新周期僅為62.5μs,對應通信頻率為16kHz,再考慮到命令組成的數據包很小,所以極短的通信時間能夠保證本試驗系統的實時性要求。
基于上述二次開發的技術路線,構建出了一個開放式直線電機驅動高性能伺服系統的綜合試驗平臺,并廣泛深入開展了PID控制法、極點配置控制法、CMAC復合控制法和神經網絡學習控制法等多種先進控制策略的試驗研究。
4 結語
除上述技術問題以外,還有如下一些方面值得關注。例如,由于數控機床中直線電機速度快、動態響應迅速,因此對機床本體剛度和工作臺輕量化結構設計提出了更高的要求;直線電機非線性強耦合的敞開式磁場在機床床身磁性材料的影響下產生畸變,會影響到電機的性能參數;高速機床在加工工件時,切削行程一般只有幾十或幾百毫米,在需要很高進給速度條件下,只有在瞬間達到高速和在高速行程中瞬間準停,高速直線運動才有意義;直線電機發熱對機床結構幾何精度的影響及其相應的冷卻措施;直線電機伺服驅動單元裝于機床垂直進給軸時重力對其的影響以及相應的抑制措施;直線伺服系統高速運行過程中的安全防護等。
當然,在國內,直線電機在機床中的應用還只是處于起步階段,隨著推廣應用后產量的增加成本會降低。隨著技術難題的不斷解決,加工零件對機床精度要求的不斷提高,可以預計直線電機在數控機床中的應用必定會越來越廣泛。
[1] 肖曙紅,查長禮,張伯霖.高速大推力直線電機直接驅動進給系統動態性能的分析[J].機床與液壓,2007,35(5):20-22.
[2] Kim J K,Joo S W,Hahn S C.Static Characteristics of Linear BLDC Motor Using Equivalent Magnetic Circuit and Finite Element Method[J].IEEE Trans. on Mag.,2004,40(2):742-745.
[3] Lu Junyong,Ma Weiming.Dynamic Characteristic Analysis of High Speed Long Primary Block Feeding Linear Induction Motor[C]//International Conference on Electrical Machines and systems(ICEMS2008).Wuhan,2008:3459-3463.
[4] 史黎明,何晉偉.基于擴展繞組函數的直線異步電動機動態特性[J].電工技術學報,2008,23(10):28-32.
[5] 郭瑤瑤,劉成穎,王先逵.機床進給系統用永磁直線電機法向吸力的研究[J].中國機械工程,2007,18(10):1174-1177.
[6] 余顯忠,陳學東,葉璽,等.精密雙層氣浮直線電機動力學響應分析[J].中國機械工程,2008,19(7):761-765.
[7] Rohrig C,Jochheim A.Identification and Compensation of Force Ripple in Linear Permanent Magnet Motors[C]//Proceedings of the American Control Conference.Arlington,2001:2161-2166.
[8] 林家春,李偉,王先逵,等.基于NESO的直線電動機推力波動補償策略[J].北京工業大學學報,2008,34(8):811-814.
[9] Braembussche P V,Swevers J H,Brussel V.Design and Experimental Validation of Robust Controllers for Machine Tool Drives with Linear Motor[J].Mechatronics,2001,11:545-562.
[10] Chen Shangliang,Hsieh T.Repetitive Control Design and Implementation for Linear Motor Machine Tool[J].International Journal of Machine Tools and Manufacture,2007,47:1807-1816.
[11] Pan Chao,Zuo Jianmin,Wang Mulan,et al. Theoretical Analysis and Experiment on Dynamic Performance of Linear Servo System Based on Pole Placement[C]//2010 3rd International Conference on Computer and Electrical Engineering(ICCEE).Chengdu,2010:149-153.
[12] Zhang Dailin,Chen Youping,Zhou Zude,et al.Robust Adaptive Motion Control of Permanent Magnet Linear Motors Based on Disturbance Compensation[J].IEEE Electr. Power Appl.,2007,4:543-548.
[13] 潘超,左健民,汪木蘭.基于前饋及反饋補償的高性能直線伺服系統[J].系統仿真學報,2010,22(12):3025-3029.
