基于前起落架突伸技術(shù)的新型緩沖器仿真設(shè)計(jì)分析
2012-11-30 06:25:44王彤許鋒聶宏
中國(guó)機(jī)械工程 2012年3期
王 彤 許 鋒 聶 宏
南京航空航天大學(xué)飛行器先進(jìn)設(shè)計(jì)技術(shù)國(guó)防重點(diǎn)學(xué)科實(shí)驗(yàn)室,南京,210016
0 引言
在彈射起飛方式下,艦載機(jī)將在2~3s之內(nèi)加速到離艦起飛速度,縱向過(guò)載峰值高達(dá)4g~6g(g為重力加速度),飛行員在短時(shí)間內(nèi)可能會(huì)失去協(xié)調(diào)操縱能力,不能迅速有效地操縱飛機(jī),因此,艦載機(jī)在無(wú)飛行員干涉條件下迅速達(dá)到起飛迎角是順利飛離母艦并繼續(xù)前飛的關(guān)鍵因素。為使飛機(jī)在彈射沖程末端與拖曳滑塊自動(dòng)分離后能迅速增大迎角達(dá)到起飛要求,研究者們應(yīng)用前起落架突伸技術(shù),在彈射力消失瞬間使前起落架緩沖器在壓縮空氣的推動(dòng)下突伸,對(duì)飛機(jī)施加抬頭力矩以迅速增大迎角[1-3]。
前起落架突伸技術(shù)的應(yīng)用對(duì)緩沖器突伸模式以及其結(jié)構(gòu)形式提出了新的挑戰(zhàn)。從20世紀(jì)90年代起,國(guó)內(nèi)學(xué)者開(kāi)始逐漸開(kāi)展艦載機(jī)彈射起飛特性的研究,并取得了一定的科研成果,但所使用的研究手段多止于抽象的動(dòng)力學(xué)方程推導(dǎo),適用于突伸技術(shù)的緩沖器結(jié)構(gòu)的設(shè)計(jì)細(xì)節(jié)研究并無(wú)突破。
本文采用理論計(jì)算與仿真相結(jié)合的方法,對(duì)應(yīng)用前起落架突伸技術(shù)的緩沖器構(gòu)型進(jìn)行了研究。研究表明,增加高壓充氣的突伸模式能夠提供比單純釋放儲(chǔ)存勢(shì)能的突伸模式更可靠穩(wěn)定的突伸力;在常規(guī)型雙腔油氣式緩沖器的基礎(chǔ)上,增加旁路閥門適當(dāng)減小反彈阻尼,可以有效縮短突伸時(shí)間,更快增大起飛迎角和建立離艦后的飛機(jī)平衡姿態(tài)。
1 突伸模式研究
為了得到理想的起飛特性,在應(yīng)用前起落架突伸技術(shù)時(shí)需首先選擇合適的突伸模式,總結(jié)相關(guān)文獻(xiàn)研究結(jié)果以及典型艦載機(jī)的使用經(jīng)驗(yàn)[4],突伸模式大致分為勢(shì)能儲(chǔ)存和高壓充氣兩種。前者是指在彈射之前將前起落架緩沖器壓縮至一定位置,積蓄勢(shì)能,在彈射沖程末端,釋放儲(chǔ)存的勢(shì)能以提供突伸力;后者是指將緩沖器內(nèi)氣腔與飛機(jī)所帶高壓氣瓶相連通,并由電磁閥控制,電磁閥開(kāi)啟時(shí),高壓氣瓶向緩沖器內(nèi)注入高壓氣體,推動(dòng)活塞向下運(yùn)動(dòng)產(chǎn)生突伸。
勢(shì)能儲(chǔ)存方法簡(jiǎn)單易行,不會(huì)造成起落架結(jié)構(gòu)增重,也無(wú)需額外攜帶高壓氣瓶。彈射之前的緩沖器壓縮過(guò)程與彈射時(shí)的緩沖器突伸過(guò)程可視作緩沖器的一個(gè)正行程加上一個(gè)反行程,為一個(gè)循環(huán)。在一個(gè)循環(huán)中停頓一定時(shí)間,熱量便與外界發(fā)生交換,因此釋放儲(chǔ)存勢(shì)能的突伸模式更近似于等溫過(guò)程。不計(jì)油液流經(jīng)節(jié)流小孔時(shí)損失的能量,儲(chǔ)存勢(shì)能由于熱量交換而部分喪失,最終所釋放的能量難以提供足夠的突伸力[4]。
采用高壓充氣方法會(huì)增加起落架緩沖器結(jié)構(gòu)的復(fù)雜性,但是電磁閥控制啟閉可以使輸出的突伸力保持在可控范圍之內(nèi),并且注入高壓氣體使得氣腔內(nèi)增壓更大,可以提供更大的突伸力。
對(duì)艦載機(jī)施加突伸力,可使得飛機(jī)迅速抬頭增大迎角,而迎角的增加量直接受限于緩沖器能夠突伸的行程。為盡可能增大迎角,緩沖器需要有足夠的突伸空間,因此緩沖器在突伸之前需處于壓縮狀態(tài),即采用高壓充氣方法也必須以前起落架壓縮作為前提。
基于以上分析,本文提出一種勢(shì)能儲(chǔ)存和高壓充氣相結(jié)合的突伸模式。即在彈射之前將前起落架緩沖器壓縮一定行程,在彈射沖程末端,在釋放儲(chǔ)存勢(shì)能的同時(shí)注入高壓氣體,推動(dòng)活塞運(yùn)動(dòng)產(chǎn)生突伸。這種組合的突伸模式的優(yōu)點(diǎn)在于能夠提供穩(wěn)定的突伸力及較長(zhǎng)的突伸距離,并提高突伸的可靠性。
2 緩沖器結(jié)構(gòu)設(shè)計(jì)
2.1 緩沖器構(gòu)型
雙腔油氣式緩沖器因其高效率和高功量吸收能力而被普遍應(yīng)用于現(xiàn)代飛機(jī)上,與變截面油孔設(shè)計(jì)技術(shù)的結(jié)合更進(jìn)一步提高了緩沖器性能[5]。本文對(duì)常規(guī)型雙腔油氣式緩沖器進(jìn)行改進(jìn),使飛機(jī)在組合突伸模式下更快建立起飛迎角,縮短突伸時(shí)間。
在組合突伸模式下,通過(guò)高壓充氣向緩沖器氣腔內(nèi)注入高壓氣體,需經(jīng)過(guò)一定的時(shí)間達(dá)到預(yù)定氣腔壓力,之后,增壓的空氣體積膨脹推動(dòng)活塞運(yùn)動(dòng)產(chǎn)生突伸時(shí),油液受擠壓流經(jīng)節(jié)流小孔,產(chǎn)生的油液阻尼力是影響緩沖器伸展速度的重要因素。因此要加快突伸速度,需要減小相應(yīng)突伸時(shí)產(chǎn)生的油液阻尼力。根據(jù)下式可知增大油孔面積可以減小油液阻尼力:
(1)

本文提出的緩沖器的結(jié)構(gòu)方案如圖1所示。結(jié)構(gòu)中設(shè)置有一個(gè)旁路閥門,閥門上有一個(gè)旁路油孔,它需由推動(dòng)彈簧來(lái)開(kāi)啟,獨(dú)立于主油孔之外工作。這種緩沖器的工作原理是:緩沖器在普通起飛著陸時(shí),兩氣腔內(nèi)最大壓力都達(dá)不到開(kāi)啟旁路油孔的壓力,因此旁路油孔不工作;而在彈射起飛時(shí),從飛機(jī)所攜帶的高壓氣瓶向緩沖器內(nèi)注入高壓氣體,氣腔內(nèi)壓力升高到開(kāi)啟壓力,推動(dòng)旁路閥門中的彈簧運(yùn)動(dòng),旁路油孔開(kāi)啟,與主油孔一起工作。
這種結(jié)構(gòu)方案使得緩沖器具有突伸狀態(tài)與普通狀態(tài)兩種工作狀態(tài)。突伸狀態(tài)下,旁路油孔開(kāi)啟,相當(dāng)于增大了油孔面積,減小了油液阻尼力,從而縮短了突伸時(shí)間;普通狀態(tài)下旁路油孔關(guān)閉,不影響飛機(jī)降落和滑跑過(guò)程中的緩沖性能。
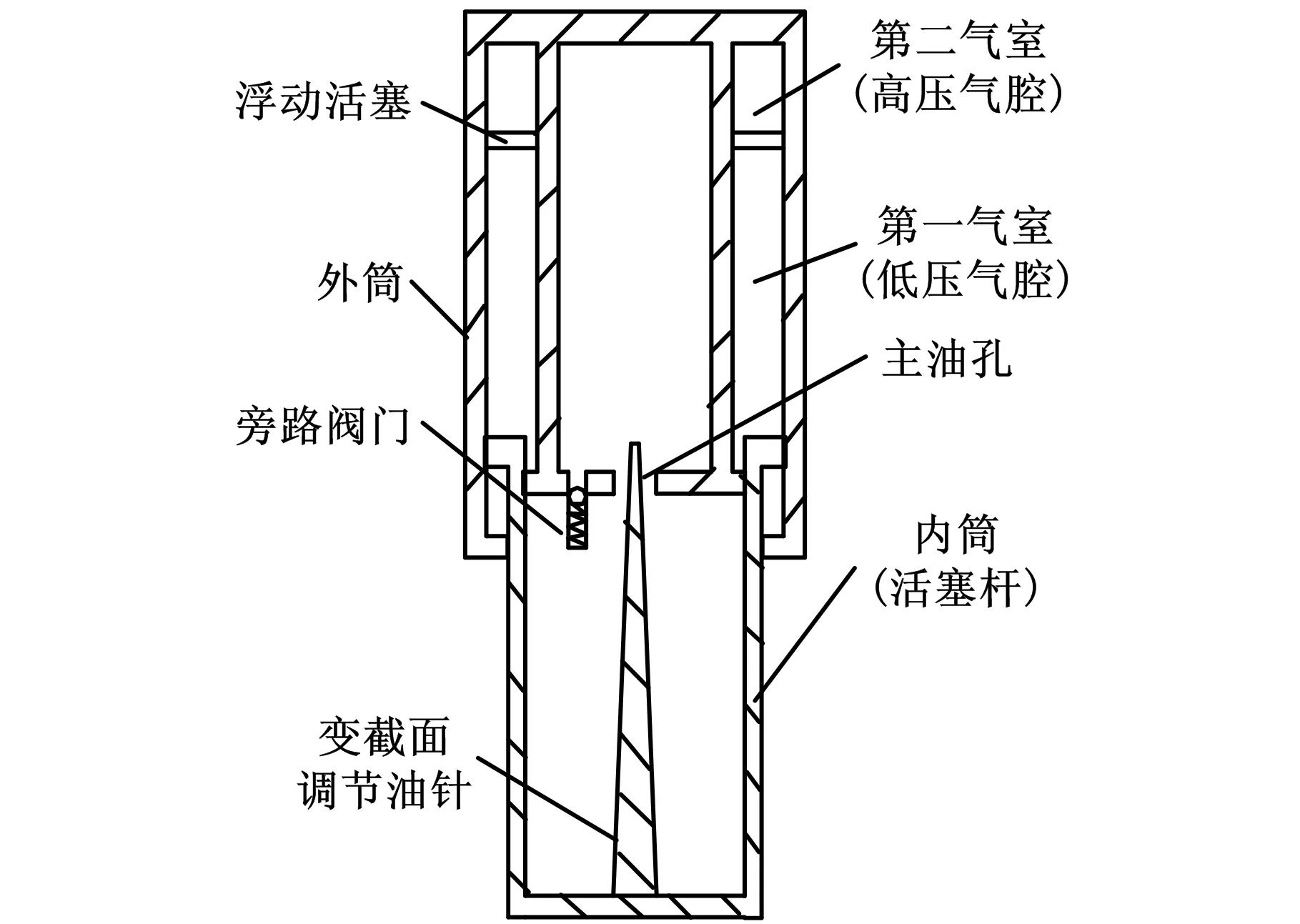
圖1 緩沖器構(gòu)型圖
2.2 緩沖器充填參數(shù)
壓縮比設(shè)置如下[5]:停機(jī)到全伸長(zhǎng)壓縮比為3∶1;全壓縮到停機(jī)壓縮比為2∶1。
前輪相當(dāng)質(zhì)量(GJB67.4-85)為
(2)
式中,a為前輪距重心長(zhǎng)度;b為主輪距重心長(zhǎng)度;h為重心距主輪軸高度。
根據(jù)飛機(jī)設(shè)計(jì)手冊(cè)[5]計(jì)算的雙腔油氣式緩沖器充填參數(shù)如表1所示。
3 緩沖器系統(tǒng)建模
3.1 力學(xué)模型
模型基本假設(shè)如下:①只考慮機(jī)體坐標(biāo)系下垂直平面內(nèi)的運(yùn)動(dòng),所有力均作用在此平面內(nèi);②多輪胎特性等效為一個(gè)當(dāng)量輪胎特性;③忽略緩沖器水平方向以外的撓度變化。
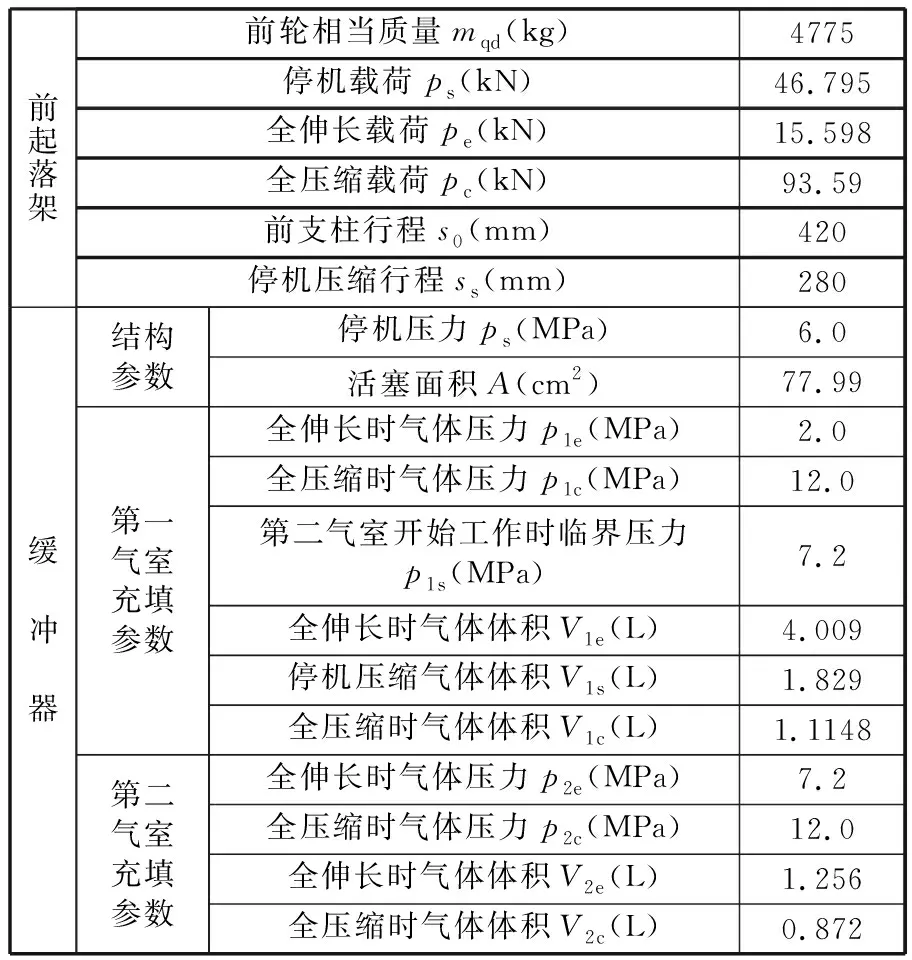
表1 緩沖器充填參數(shù)
起落架系統(tǒng)可以等效為三個(gè)部分:上部質(zhì)量(包括飛機(jī)等效質(zhì)量、緩沖器外筒質(zhì)量),下部質(zhì)量(包括緩沖器活塞桿、剎車裝置、輪胎質(zhì)量),以及轉(zhuǎn)動(dòng)質(zhì)量(包括輪胎、剎車的轉(zhuǎn)動(dòng)部分)[6]。取起落架各個(gè)不同的分離體進(jìn)行研究,建立起落架系統(tǒng)動(dòng)力學(xué)方程[7-9],其緩沖過(guò)程可以分為兩個(gè)階段。
(1)初始觸地階段。上部質(zhì)量與下部質(zhì)量同步運(yùn)動(dòng),僅有輪胎壓縮,緩沖器不壓縮。
垂直方向:
(3)
水平航向:
(4)
輪胎旋轉(zhuǎn):
(5)
(2)緩沖器開(kāi)始?jí)嚎s階段。輪胎與緩沖器一起壓縮。
垂直方向(上部質(zhì)量):
(6)
垂直方向(下部質(zhì)量):
(7)
水平航向:
(8)
輪胎旋轉(zhuǎn):
(9)
作用在起落架系統(tǒng)上的力包括空氣動(dòng)力、緩沖支柱內(nèi)力和輪胎力,其中:
空氣動(dòng)力為
L=nL(Wj+Ww)
(10)
緩沖支柱內(nèi)力為
Fs=Fa+Fh+Ff
(11)
輪胎上的垂直反力為
(12)
輪胎上的水平反力為
(13)

緩沖器分離體受力如圖2所示。其中,Nu為緩沖器上軸套的垂直力;Nl為緩沖器下軸套的垂直力。
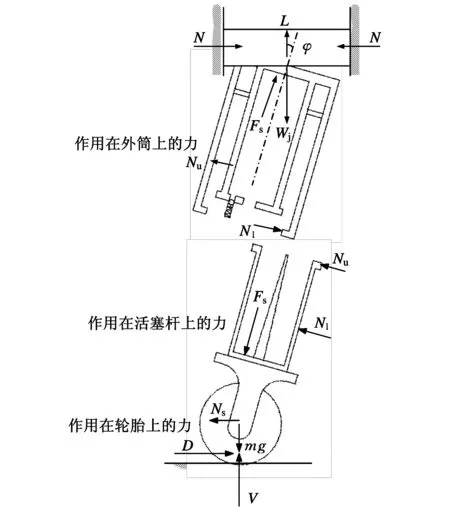
圖2 緩沖器分離體受力圖
3.2 仿真模型
動(dòng)力學(xué)分析軟件LMS Virtual. Lab中的Motion模塊具有優(yōu)越的動(dòng)力學(xué)求解性能,在其中建立前起落架虛擬樣機(jī)模型并進(jìn)行突伸動(dòng)態(tài)仿真可以獲得準(zhǔn)確的結(jié)構(gòu)動(dòng)態(tài)性能信息。在傳統(tǒng)的起落架動(dòng)態(tài)性能仿真中,由于無(wú)法模擬空氣和油液,空氣彈簧力和油液阻尼力需要以拉壓彈簧或者由函數(shù)控制的力的形式加載到模型上,故這兩種形式都是用數(shù)學(xué)方法間接地模擬空氣彈簧力和油液阻尼力。AMESim(全稱為L(zhǎng)MS Imagine. Lab AMESim)是一款專門用于機(jī)械/液壓系統(tǒng)建模、仿真和動(dòng)力學(xué)分析的軟件,采用該軟件可以方便地建立雙腔油氣式緩沖器的仿真模型,通過(guò)模擬空氣和油液,產(chǎn)生更符合真實(shí)情況的動(dòng)態(tài)的空氣彈簧力和油液阻尼力。聯(lián)合仿真既利用了Motion模塊在動(dòng)力學(xué)求解問(wèn)題上的優(yōu)越性,又兼顧了AMESim在模擬空氣和油液阻尼方面的便利。

圖3 前起落架虛擬樣機(jī)模型
在LMS Virtual. Lab環(huán)境下根據(jù)某型機(jī)的結(jié)構(gòu)參數(shù)建立前起落架虛擬樣機(jī)模型,如圖3所示,在緩沖器活塞桿與外筒的局部坐標(biāo)系上連接AMESim接口, AMESim中模擬的活塞運(yùn)動(dòng)將提供空氣彈簧力和油液阻尼力,與數(shù)學(xué)函數(shù)力的加載相比較,這樣更符合真實(shí)情況。仿真模型中仍需另外加載空氣動(dòng)力和輪胎力。
(1)空氣動(dòng)力。將全機(jī)升力等效分解到前起落架、主起落架的轉(zhuǎn)軸處,作用在前起落架轉(zhuǎn)軸中心的當(dāng)量升力為
式中,la為升力作用點(diǎn)到前起落架轉(zhuǎn)軸中心的距離;lb為前起落架、主起落架轉(zhuǎn)軸中心距離。
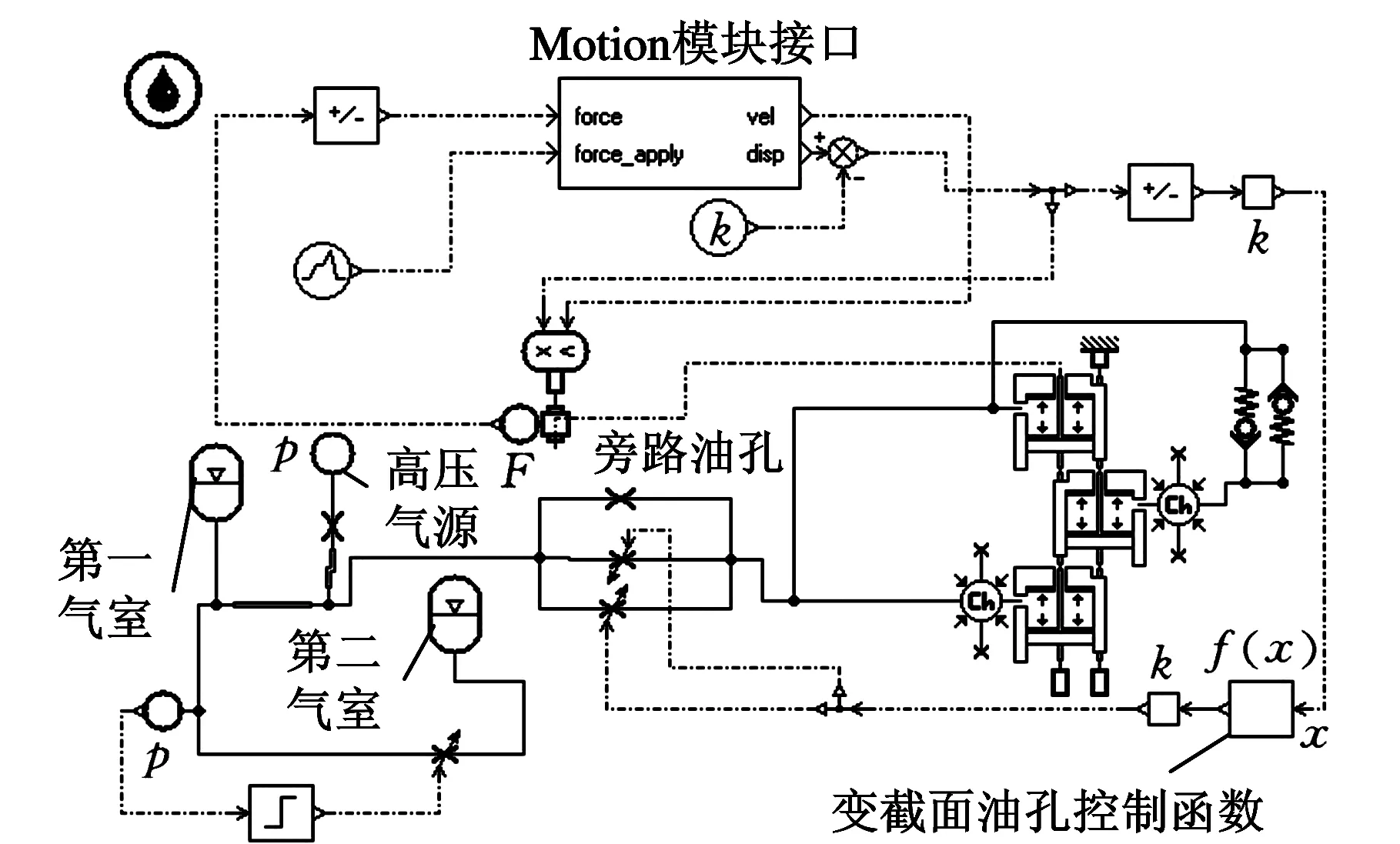
圖4 AMESim中的緩沖器仿真模型
(2)輪胎力。使用LMS Virtual. Lab Motion中的complex tire模擬輪胎力,根據(jù)某型機(jī)輪胎充填參數(shù)添加垂向和側(cè)向剛度。
在AMESim環(huán)境下,嵌入Motion模塊接口,接收速度和位移信號(hào),再經(jīng)過(guò)計(jì)算,輸出所產(chǎn)生的力信號(hào),加載在Motion中的模型上(圖4)。緩沖器外筒與活塞桿之間的相對(duì)運(yùn)動(dòng),所引起的既有兩個(gè)氣腔內(nèi)氣體體積的變化,也有液體的流量變化,其中,氣體體積的變化由AMESim中無(wú)熱量交換的蓄能器呈現(xiàn),液體流量的變化等效為HCD庫(kù)中的活塞單元的運(yùn)動(dòng),另外,變截面油孔等效為可變節(jié)流閥,由控制信號(hào)控制其節(jié)流口面積的大小[10]。
4 緩沖性能仿真
4.1 仿真條件
設(shè)置前起落架以6m/s的下沉速度接觸跑道,此時(shí)緩沖器支柱處于全伸長(zhǎng)狀態(tài),觸地后緩沖器與輪胎將經(jīng)過(guò)壓縮—振蕩過(guò)程后回彈至停機(jī)位置。緩沖性能仿真具有兩種意義:對(duì)比仿真結(jié)果中關(guān)鍵參數(shù)與表1中各狀態(tài)下的理論計(jì)算結(jié)果,如果能夠保持一致則證明模型有效;如果載荷—行程曲線能顯示緩沖器具有較高的效率,緩沖器支柱載荷在合理范圍之內(nèi),也可以側(cè)面反映模型的有效性[11-14]。
4.2 結(jié)果分析
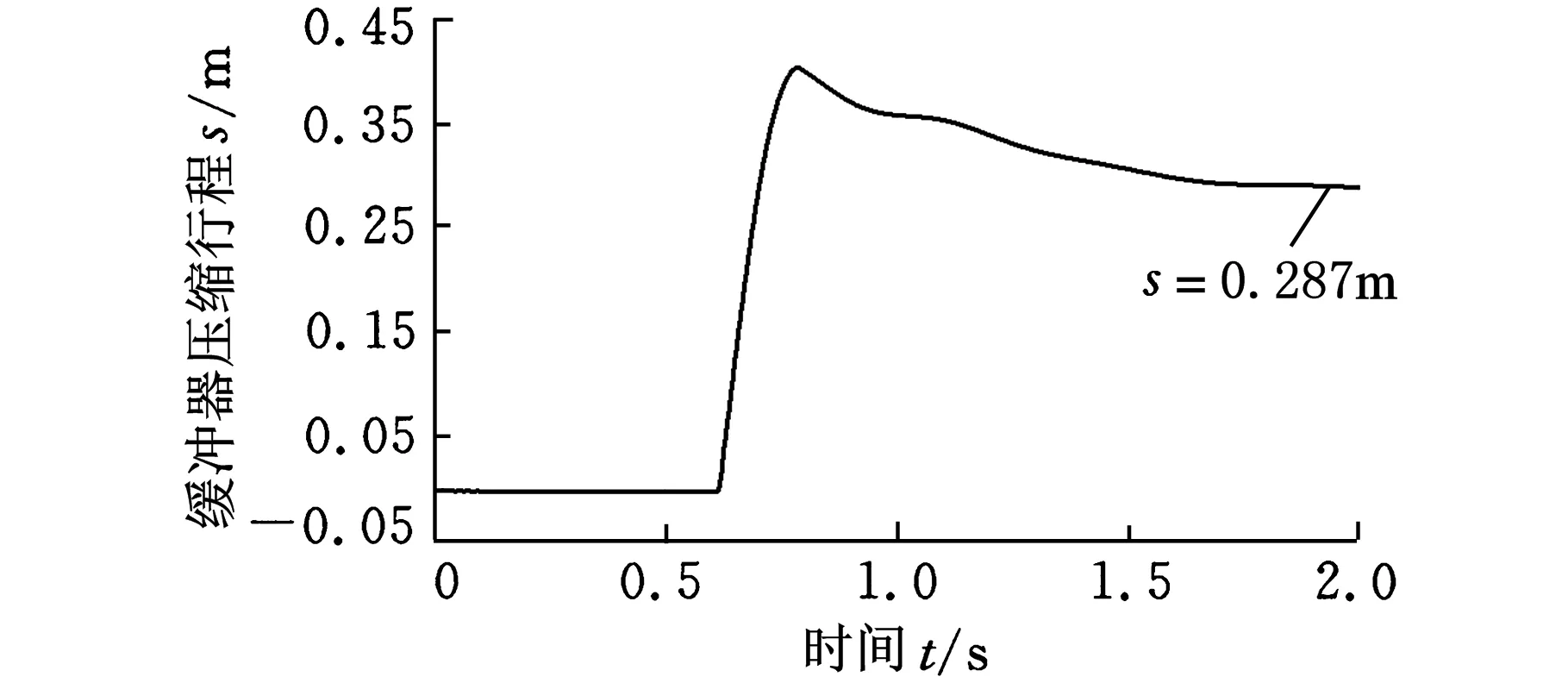
圖5 緩沖器壓縮行程曲線
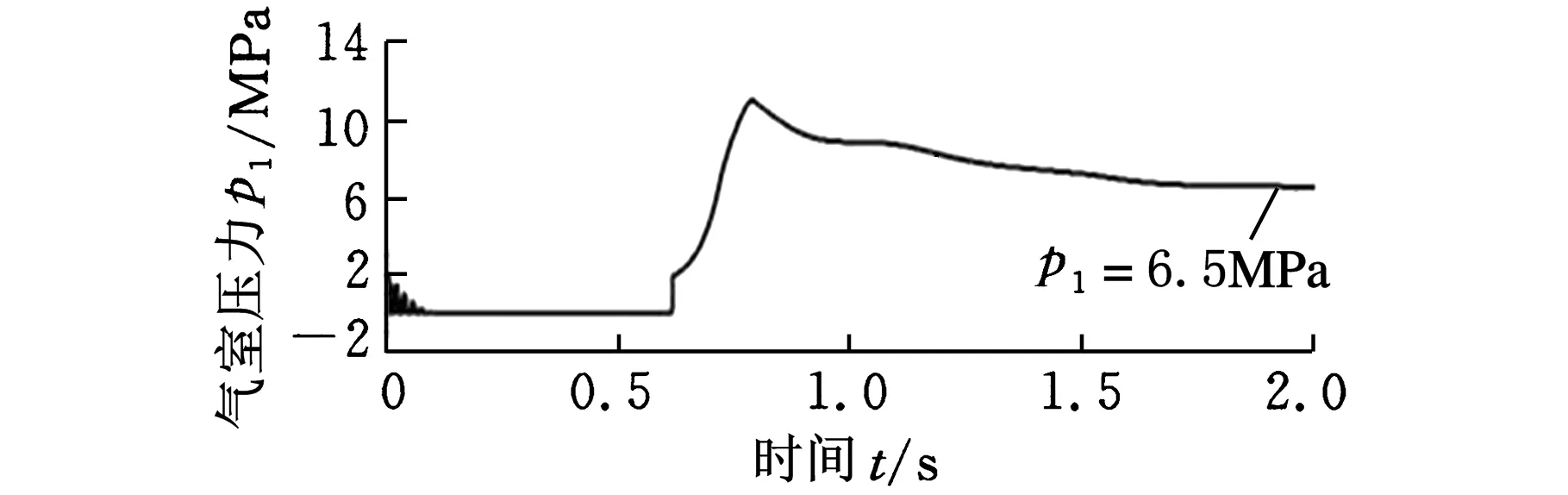
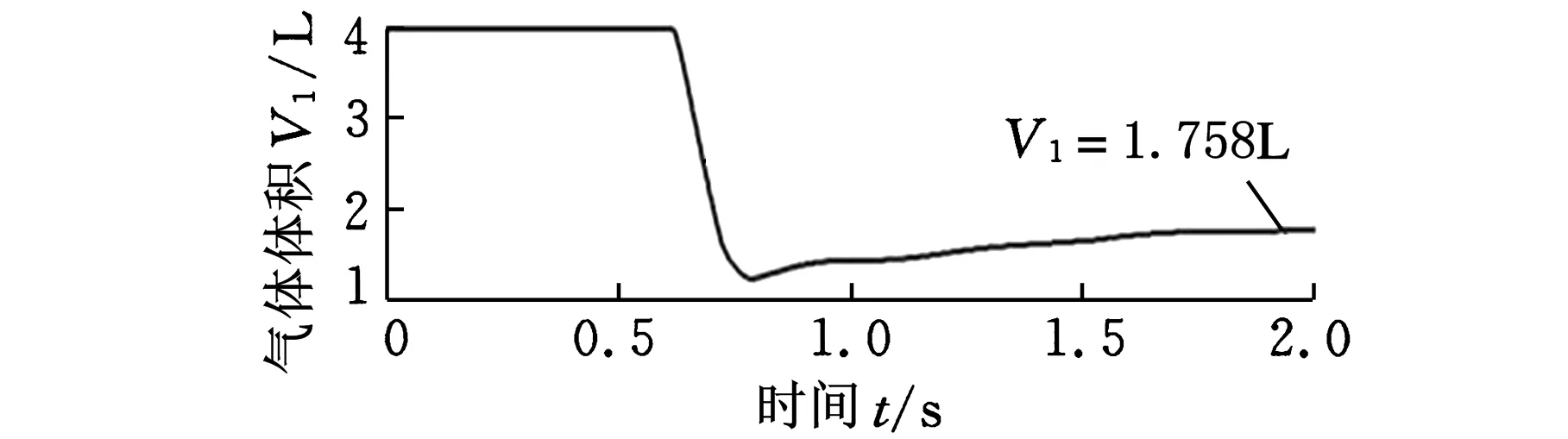
圖6 第一氣室氣體壓力和體積變化曲線
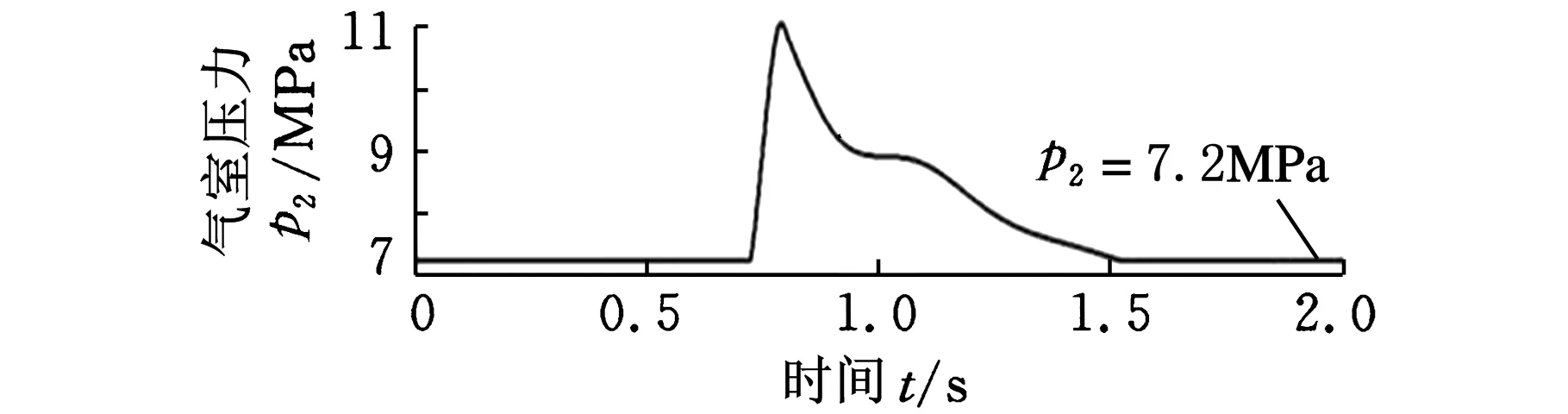
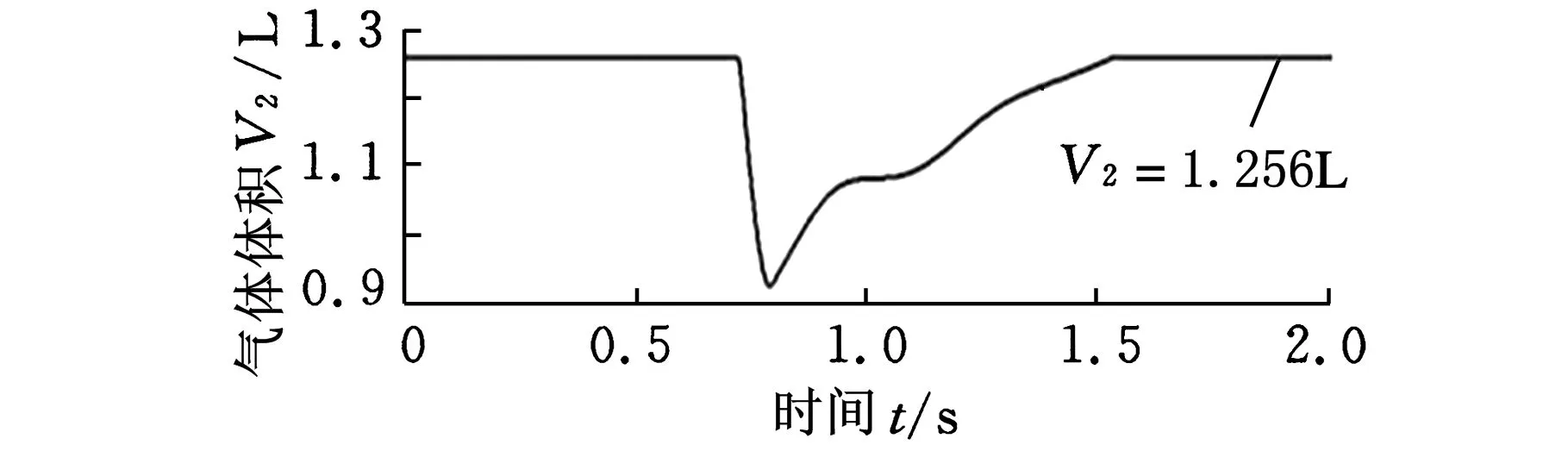
圖7 第二氣室氣體壓力和體積變化
如圖5所示,緩沖器觸地后迅速壓縮至行程400mm左右,又緩慢回彈,經(jīng)1.7s左右進(jìn)入停機(jī)平衡狀態(tài),壓縮行程287mm,略高于計(jì)算停機(jī)壓縮行程280mm。由于仿真時(shí)間僅為2s,緩沖器壓縮行程仍有回彈趨勢(shì),因此若延長(zhǎng)仿真時(shí)間,停機(jī)壓縮行程最終將與理論值相差無(wú)幾。圖6和圖7所示曲線表示兩氣室的氣體壓力和體積變化,第一氣室與理論值略有誤差,考慮到氣體仍有膨脹趨勢(shì),誤差也在可接受范圍之內(nèi)。第二氣室與理論值吻合程度較高,充分體現(xiàn)了雙腔緩沖器的工作特點(diǎn),即在第一氣室壓縮到達(dá)臨界點(diǎn)時(shí)第二氣室才會(huì)開(kāi)始工作,也說(shuō)明仿真模型中的壓力控制單元非常有效。
圖8和圖9所顯示的緩沖支柱的最大載荷在可以接受的合理范圍之內(nèi),并且載荷—行程曲線光滑飽滿,緩沖器效率達(dá)到70%以上。
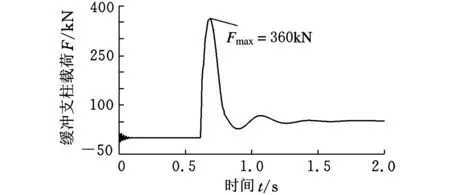
圖8 緩沖支柱載荷
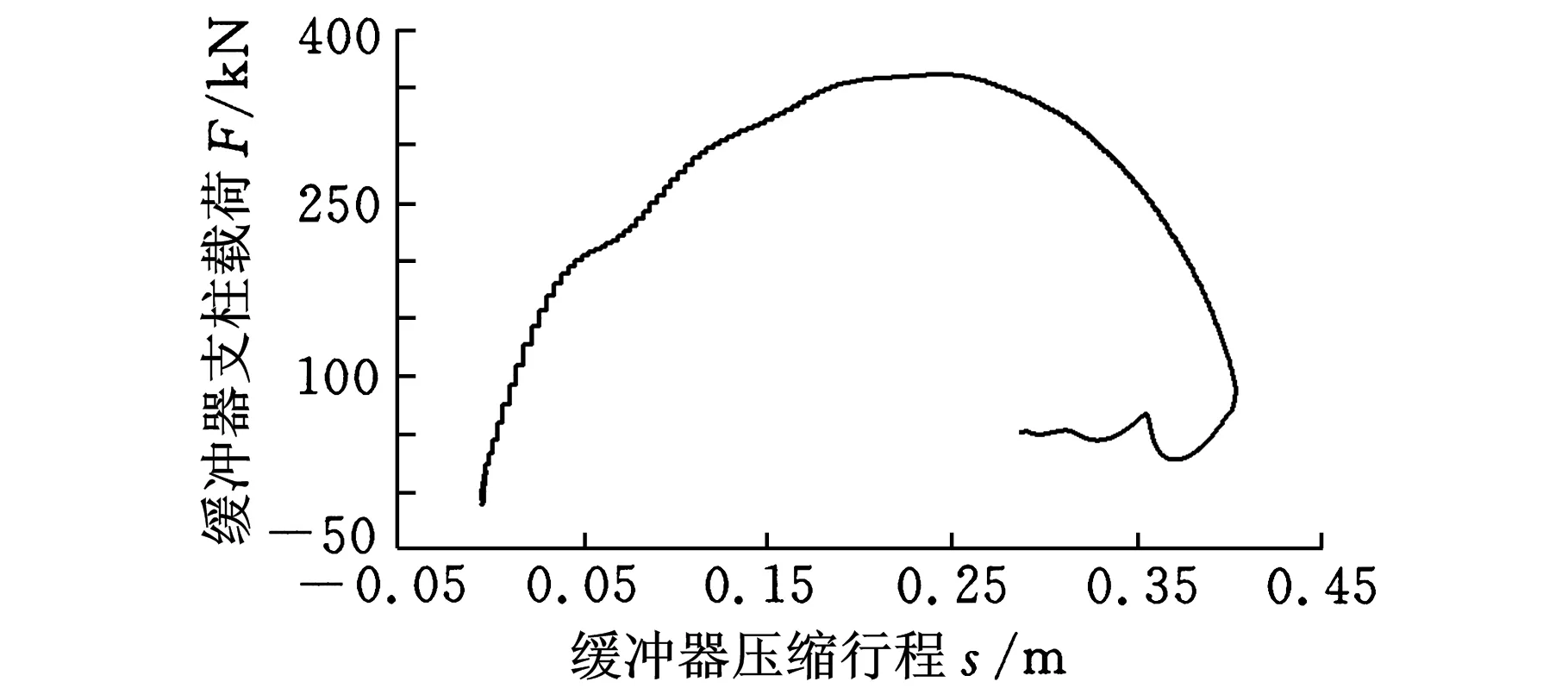
圖9 載荷—行程曲線
仿真結(jié)果分析表明,所建立的聯(lián)合仿真模型能夠滿足緩沖器的各項(xiàng)要求。
5 前起落架突伸仿真
5.1 仿真環(huán)境設(shè)置
設(shè)置前起落架在預(yù)先壓縮狀態(tài)下突伸至全伸長(zhǎng)狀態(tài),除緩沖器處于全壓縮狀態(tài)外,輪胎預(yù)壓縮30mm,仿真時(shí)間1s。為了進(jìn)行對(duì)比,按照使用突伸模式和緩沖器構(gòu)型的不同分為三種情況。
(1)使用釋放儲(chǔ)存勢(shì)能的方式突伸,前起落架在全壓縮狀態(tài)下開(kāi)始突伸,使用常規(guī)型雙腔油氣式緩沖器。
(2)使用釋放儲(chǔ)存勢(shì)能并增加高壓充氣的方式突伸,前起落架處于全壓縮狀態(tài)下開(kāi)始突伸,并于初始加入12MPa的穩(wěn)定高壓。使用常規(guī)型雙腔油氣式緩沖器。
(3)使用釋放儲(chǔ)存勢(shì)能并增加高壓充氣的方式突伸,前起落架處于全壓縮狀態(tài)下開(kāi)始突伸,并于初始加入12MPa的穩(wěn)定高壓。使用改進(jìn)型雙腔油氣式緩沖器,增加直徑10mm的旁路閥門。
5.2 結(jié)果分析
分別在三組狀態(tài)(分別對(duì)應(yīng)前述三種情況)下進(jìn)行仿真,緩沖器支柱的突伸行程—時(shí)間關(guān)系如圖10所示,抽取其中關(guān)鍵數(shù)據(jù)對(duì)比列出,如表2所示。
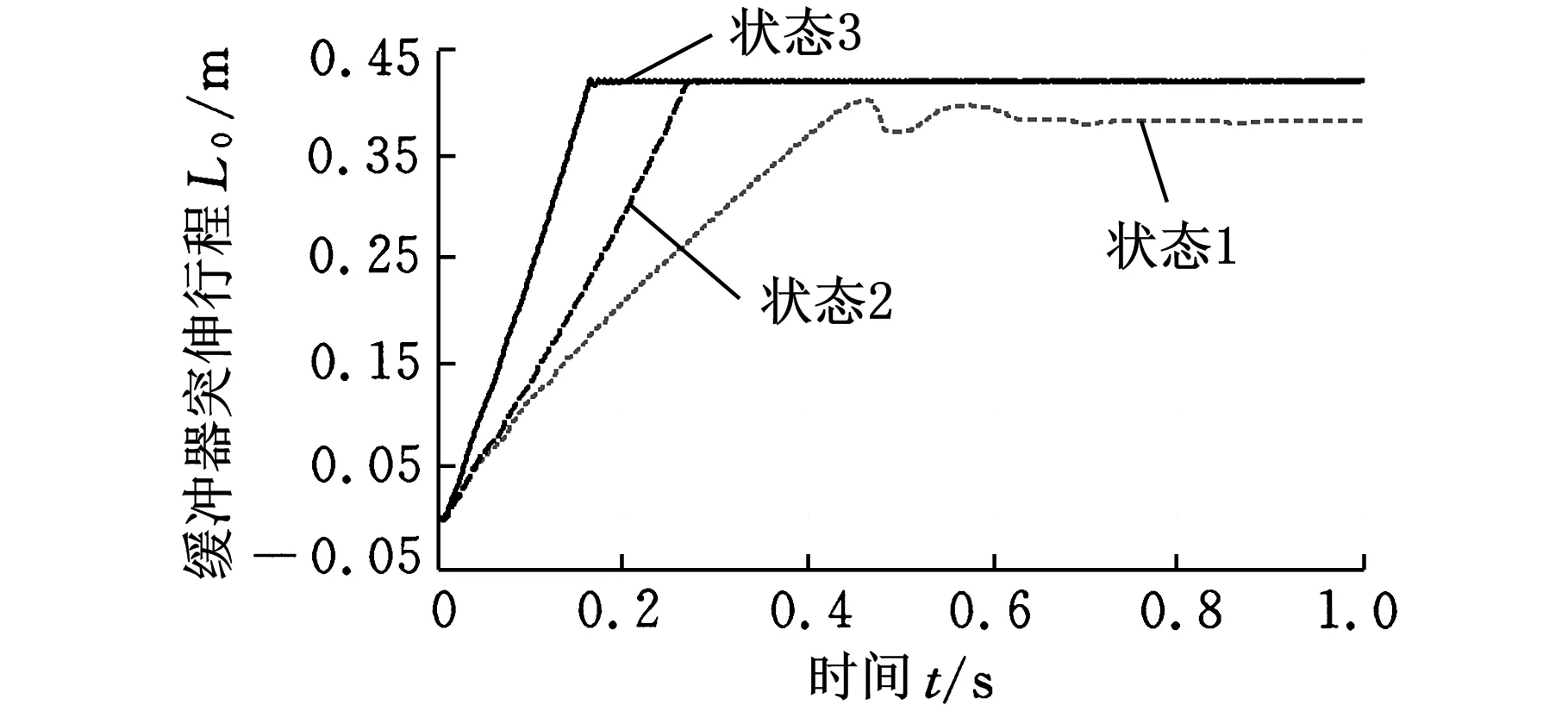
圖10 緩沖器支柱突伸行程
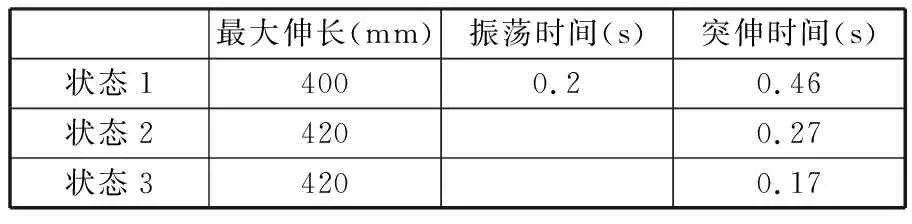
表2 仿真結(jié)果對(duì)比
單純釋放儲(chǔ)存勢(shì)能突伸,隨著活塞桿的伸長(zhǎng),氣室容積逐漸變大,氣室內(nèi)壓強(qiáng)逐漸減小,所產(chǎn)生的突伸力也相應(yīng)逐漸減小,因此突伸行程未達(dá)到最大,并且突伸時(shí)間比較長(zhǎng);充入高壓后,突伸時(shí)間顯著縮短,突伸行程也達(dá)到最大,并且曲線平滑無(wú)振蕩;在常規(guī)型雙腔油氣式緩沖器的基礎(chǔ)上增開(kāi)旁路閥門后,突伸行程達(dá)到最大,而且突伸時(shí)間進(jìn)一步縮短,狀態(tài)3的突伸時(shí)間相比狀態(tài)2的突伸時(shí)間縮短了0.1s。第三種情況獲得了最好的突伸效果。
6 結(jié)論
(1)在前起落架突伸過(guò)程中充入高壓可以有效增加突伸行程并縮短突伸時(shí)間,即恒定的突伸力比逐漸減小的突伸力更為有效。
(2)在常規(guī)型雙腔油氣式緩沖器的基礎(chǔ)上增加旁路閥門以減小反彈阻尼,可以有效加快突伸速度并縮短突伸時(shí)間。
[1] 王萌輝,趙波.艦載飛機(jī)起降動(dòng)力學(xué)研究[J].飛機(jī)設(shè)計(jì),1997(1):29-33.
[2] 鄭本武.前起落架突伸對(duì)艦載飛機(jī)彈射起飛航跡的影響[J]. 南京航空航天大學(xué)學(xué)報(bào),1994,26(1):27-33.
[3] 趙波.艦載機(jī)起降過(guò)程的幾個(gè)飛行動(dòng)力學(xué)問(wèn)題[J].飛行力學(xué),1991(4):83-89.
[4] 胡淑玲,林國(guó)鋒.前起落架突伸對(duì)艦載機(jī)起飛特性的影響[J]. 飛行力學(xué),1994(1):28-34.
[5] 《飛機(jī)設(shè)計(jì)手冊(cè)》總編委會(huì).飛機(jī)設(shè)計(jì)手冊(cè)-第14冊(cè):起飛著落系統(tǒng)設(shè)計(jì)[M].北京:航空工業(yè)出版社,2002.
[6] 沈強(qiáng),黃再興.艦載機(jī)前起落架突伸性能優(yōu)化[J].計(jì)算機(jī)輔助工程,2009,18(3):31-36.
[7] 張明,聶宏,朱如鵬,等.基于虛擬樣機(jī)技術(shù)的飛機(jī)地面運(yùn)動(dòng)多學(xué)科協(xié)同仿真[J]. 中國(guó)機(jī)械工程,2010, 21(10) :1194-1199.
[8] 魏小輝,聶宏.艦載機(jī)起落架落震性能動(dòng)力學(xué)仿真分析[J].中國(guó)機(jī)械工程,2007,18(5):520-523.
[9] 史友進(jìn).大柔性飛機(jī)起落架緩沖器設(shè)計(jì)研究[D].南京:南京航空航天大學(xué),2006.
[10] 汪云峰,柴宗柒.基于AMESim/Matlab的液壓緩沖器仿真與優(yōu)化[J].機(jī)床與液壓,2008, 36(3): 167-203.
[11] Reed W H. An Evaluation of A Method of Improving the Take-off Characteristics of Catapult Launched Jet Airplanes[R]. AD,1953.
[12] Reed W H. An Analysis of the Effect of A Curved Ramp on the Take-off Performance of Catapult Launched Airplanes[R].NACA,1952.
[13] Naval Air Systems Command Department of the Navy. MIL-DTL-85110B(AS) Detail Specification Bar, Repeatable Release Holdback (RRHB),Aircraft Launching, General Requirement for[S].Military Specifications and Standards,1997.
[14] Naval Air Systems Command Department of the Navy. MIL-A-8863C. Military Specification Airplane Strength and Rigidity Ground Loads for Navy Acquired Airplanes[S]. Military Specifications and Standards,1993.
