反艦導(dǎo)彈末制導(dǎo)律三維仿真技術(shù)研究
2012-12-03 02:53:20王文雙張東興李相平
制導(dǎo)與引信 2012年1期
關(guān)鍵詞:模型
張 剛, 王文雙, 張東興, 李相平
(1.海軍航空工程學(xué)院 電子信息工程系,山東 煙臺264001;2.海軍航空工程學(xué)院 科研部,山東 煙臺264001)
0 引言
2制導(dǎo)律是描述導(dǎo)彈在向目標(biāo)接近過程中所遵循的運動規(guī)律,決定了導(dǎo)彈的彈道特性及相應(yīng)的彈道參數(shù)[1]。導(dǎo)彈制導(dǎo)律對導(dǎo)彈的速度、過載、制導(dǎo)精度和單發(fā)殺傷概率有直接影響。制導(dǎo)律分為經(jīng)典制導(dǎo)律和基于現(xiàn)代控制理論的現(xiàn)代制導(dǎo)律[2]。經(jīng)典制導(dǎo)律有追蹤法、平行接近法、比例導(dǎo)引及各種改進(jìn)形式等,現(xiàn)代制導(dǎo)律有最優(yōu)控制制導(dǎo)律,微分對策制導(dǎo)律、自適應(yīng)制導(dǎo)律、微分幾何制導(dǎo)律、反饋線性化制導(dǎo)律、神經(jīng)網(wǎng)絡(luò)制導(dǎo)律,H∞制導(dǎo)律等。目前反艦導(dǎo)彈采用的傳感器日趨多樣化,有雷達(dá)、紅外、電視制導(dǎo)、激光制導(dǎo)等,對導(dǎo)彈的攔截能力也逐步提高。在反艦導(dǎo)彈的總體設(shè)計和打擊效能評估中,在如此眾多的制導(dǎo)體制和制導(dǎo)律中選擇出最恰當(dāng)?shù)闹茖?dǎo)律是一個非常重要的問題。通過計算機建模仿真,可以根據(jù)設(shè)定的場景對不同的制導(dǎo)律進(jìn)行性能對比。不同的制導(dǎo)律表達(dá)形式不同,且通常給出的是二維平面的表達(dá)形式,而反艦導(dǎo)彈攻擊目標(biāo)的過程是一個三維空間的運動。針對以上情形建立一個較為通用的模型,進(jìn)行三維制導(dǎo)律的建模仿真是非常必要的。
目前三維制導(dǎo)律仿真建模方法主要有以下幾種:
a)第一種采用差分方法建模[3],給出比例導(dǎo)引的理想彈道軌跡,若改用其它制導(dǎo)律,模型修改復(fù)雜;
b)第二種是將三維彈道解耦到發(fā)射坐標(biāo)系的鉛垂面和水平面中,該分解方法對落角約束的制導(dǎo)律仿真不精確;
c)第三種是將末制導(dǎo)的三維運動分解為垂直平面和水平面的運動[4],該分解方法適應(yīng)性廣,但是由于給出的垂直平面僅包含彈目視線,導(dǎo)彈速度矢量和目標(biāo)速度矢量并不在該平面內(nèi),仿真存在近似;
d)第四種是在視線坐標(biāo)系內(nèi)將末制導(dǎo)過程的彈目相對運動解耦成縱向平面的運動和側(cè)向平面的運動,該模型精確,但是需要多次坐標(biāo)轉(zhuǎn)換,且給出的制導(dǎo)律形式較為復(fù)雜[2,5]。
本文采用第三種解耦仿真模型,末制導(dǎo)的三維運動分解為垂直平面和水平面的運動,給出了詳細(xì)的仿真流程,并采用比例導(dǎo)引、最優(yōu)制導(dǎo)律、帶落角約束的制導(dǎo)律進(jìn)行仿真,驗證了模型的有效性。
1 反艦導(dǎo)彈—目標(biāo)相對運動模型
1.1 導(dǎo)彈和目標(biāo)的相對運動方程
導(dǎo)彈和目標(biāo)的相對運動關(guān)系如圖1所示,OXYZ為參考坐標(biāo)系,XOZ與水平面平行,其中M為導(dǎo)彈、T為目標(biāo),MT為彈目視線連線。qy為彈目視線與XOZ面的夾角即視線傾角,qz為彈目視線在XOZ的偏角,即視線偏角;導(dǎo)彈的速度為Vm,彈道傾角為θm,彈道偏角為ψm;目標(biāo)的速度為Vt,彈道傾角為θt,彈道偏角為ψt,對于水平面上運動的目標(biāo),顯然,θt=0。俯仰方向的角度,以水平面為基準(zhǔn),逆時針旋轉(zhuǎn)為正,取值范圍為 [-π/2,π/2];偏航方向的角度,以 OX軸為基準(zhǔn),由OY軸俯視時,逆時針旋轉(zhuǎn)為正,取值范圍為 (-π,π]。

圖1 反艦導(dǎo)彈末制導(dǎo)彈目空間模型
圖1中,彈目三維運動可以解耦成垂直平面和水平面的運動,在兩個平面上分別運用制導(dǎo)律,即可合成導(dǎo)彈—目標(biāo)在三維空間內(nèi)的運動軌跡。導(dǎo)彈速度和目標(biāo)速度在OXYZ坐標(biāo)系上的分量為
1.2 垂直平面相對運動方程
垂直平面內(nèi)導(dǎo)彈—目標(biāo)的相對運動模型如圖2所示。
圖2 縱平面導(dǎo)彈—目標(biāo)的相對運動模型
該平面為包含彈目視線的垂直平面。圖2中,M表示導(dǎo)彈,坐標(biāo)為(x1m,ym);T表示目標(biāo),坐標(biāo)為(x1t,yt);amy為導(dǎo)彈縱向加速度,aty為目標(biāo)縱向加速度,對于水面艦艇目標(biāo),aty=0,目標(biāo)彈道傾角θt=0。導(dǎo)彈—目標(biāo)的相對運動方程為
1.3 水平面相對運動方程
水平面內(nèi)導(dǎo)彈—目標(biāo)的相對運動模型如圖3所示。
方:您雖非圖書情報專業(yè)出身,但是從80年代中期開始您在圖書館學(xué)方面的研究成果頻頻被專業(yè)核心期刊收錄,其中除了辛勤付出之外,還有何成功秘笈?
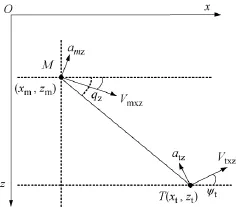
圖3 水平面導(dǎo)彈—目標(biāo)的相對運動模型
圖3中,M 表示導(dǎo)彈,坐標(biāo)為 (xm,zm);T 表示目標(biāo),坐標(biāo)為 (xt,zt);amz為導(dǎo)彈水平面加速度,atz為目標(biāo)水平面加速度,Vmxz、Vtxz是水平面上的導(dǎo)彈、目標(biāo)速度,rxz是水平面上的彈目距離。導(dǎo)彈—目標(biāo)的相對運動方程為
彈目視線角為
2 三維制導(dǎo)律仿真模型
2.1 仿真流程
三維末制導(dǎo)律的仿真流程如圖4所示。仿真過程中,要在程序開始時初始化導(dǎo)彈、目標(biāo)的速度、坐標(biāo)、彈道傾角、彈道偏角等參數(shù)。初始化完成后開始循環(huán),循環(huán)中首先計算彈目相對距離、qy、qz及垂直平面和水平面的參數(shù);其次根據(jù)彈目相對運動方 程,分 別 求 出˙r,˙rxz、˙qy,˙qz;再 次 根 據(jù)選擇的制導(dǎo)律分別計算amy,amz,對導(dǎo)彈目標(biāo)坐標(biāo)、導(dǎo)彈傾角、彈道偏角、彈目相對距離等變量進(jìn)行更新,即得到新時刻的仿真變量值;最后根據(jù)設(shè)置的仿真結(jié)束條件,判斷循環(huán)是否完成。如果循環(huán)完成,則畫出彈目運動軌跡、導(dǎo)彈加速度amy,amz的變化曲線等圖形。
仿真結(jié)束的條件可以設(shè)置為彈目相對距離小于某一數(shù)值,也可以判斷彈目相對距離˙R,當(dāng)˙R>0,即認(rèn)為導(dǎo)彈遠(yuǎn)離目標(biāo),仿真結(jié)束,用此種判定準(zhǔn)則需要注意的是某些制導(dǎo)律可能會使導(dǎo)彈在末制導(dǎo)初段遠(yuǎn)離目標(biāo)。本文針對艦船運動的特性,采用ym<yt作為仿真結(jié)束準(zhǔn)則。
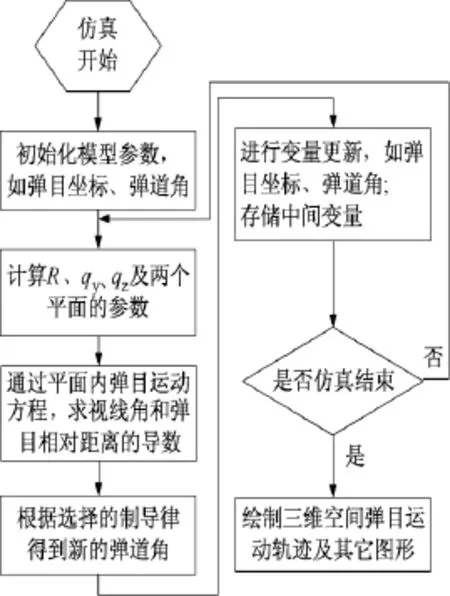
圖4 三維制導(dǎo)律仿真流程圖
在仿真過程中,為了提高模擬的精度,仿真步長要取得足夠小。當(dāng)相對距離R>1 000 m時,取仿真步長dt=0.01 s;當(dāng)1 000 m>R>50 m,取仿真步長dt=0.005 s;當(dāng)R<50 m,取仿真步長dt=0.001 s,這樣可以既精確計算出終端脫靶量,又避免計算負(fù)擔(dān)過程,提高了仿真效率。
在實際的反艦導(dǎo)彈末制導(dǎo)中,導(dǎo)彈在距離目標(biāo)很近時,雷達(dá)存在盲區(qū),因此可以設(shè)置R=200 m作為導(dǎo)彈的零控距離。導(dǎo)彈機動時,受到最大可用過載的限制,這些相關(guān)考慮也可以在仿真中根據(jù)需要合理設(shè)置。
2.2 采用的制導(dǎo)律
為了驗證模型的正確型,本文采用比例導(dǎo)引和一種最優(yōu)制導(dǎo)律和含有落角約束的制導(dǎo)律進(jìn)行仿真。
比例導(dǎo)引制導(dǎo)律是當(dāng)前導(dǎo)彈武器系統(tǒng)中廣泛采用的制導(dǎo)律,它通過使速度矢量的轉(zhuǎn)動角速度正比于目標(biāo)視線的轉(zhuǎn)動角速度,進(jìn)而能夠抑制視線轉(zhuǎn)率。在垂直平面和水平面采用的比例導(dǎo)引形式為[6]

式中:比例導(dǎo)引的導(dǎo)航比N1=N2=3。
(2)最優(yōu)制導(dǎo)律
該最優(yōu)制導(dǎo)律是通過脫靶量指標(biāo)和能量消耗均為最小指標(biāo),結(jié)合彈目運動方程推導(dǎo)出的制導(dǎo)律形式。文獻(xiàn)[7]給出的制導(dǎo)律在垂直平面和水平面的表達(dá)式為
(3)帶有落角約束的制導(dǎo)律
當(dāng)對海面艦艇打擊時,除了滿足脫靶量和制導(dǎo)過程中能量消耗最小外,有時還要考慮彈著角的要求。下面是文獻(xiàn)[4]給出的含有落角約束的制導(dǎo)律:
式中:Tg為剩余飛行時間,Tg=-r/˙r;θmf是導(dǎo)彈擊中目標(biāo)時的速度傾角。
3 仿真結(jié)果分析
仿真1:通過比例導(dǎo)引和最優(yōu)制導(dǎo)律驗證模型。假設(shè)導(dǎo)彈初始坐標(biāo)為(0,3 000,0),單位為米;導(dǎo)彈速度vm=300 m/s,在慣性坐標(biāo)系的彈道傾角θm=0°,彈道偏角ψm=0°;目標(biāo)初始坐標(biāo)為(8 000,0,1 000),單位為米;目標(biāo)速度vt=100 m/s,目標(biāo)在水平面內(nèi)做勻速直線運動,θt=0°,ψt=-20°,當(dāng)彈目距離小于200 m時,垂直平面和水平面的制導(dǎo)指令為0,兩種制導(dǎo)律下的三維彈道曲線如圖5所示。
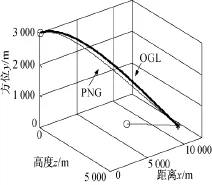
圖5 三維彈道曲線
由圖5可知,兩種制導(dǎo)律均能擊中目標(biāo),脫靶量均小于1 m,其中比例導(dǎo)引(PNG)彈目交會時間為43.44 s;最優(yōu)制導(dǎo)律(OGL)彈目交會時間為43.73 s。如果降低目標(biāo)速度,打擊精度會進(jìn)一步提高。
圖6、圖7分別為垂直平面、水平面上加速度隨時間變化的曲線。從圖中可以看出,最優(yōu)制導(dǎo)律相對于比例導(dǎo)引,加速度變化要平緩些,這在實際中降低了對導(dǎo)彈過載的要求。兩個制導(dǎo)律的加速度最終變?yōu)?,這是因為設(shè)置了停控距離。
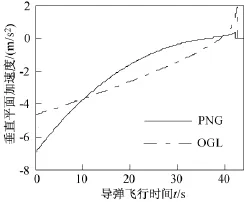
圖6 時間與垂直平面加速度關(guān)系圖
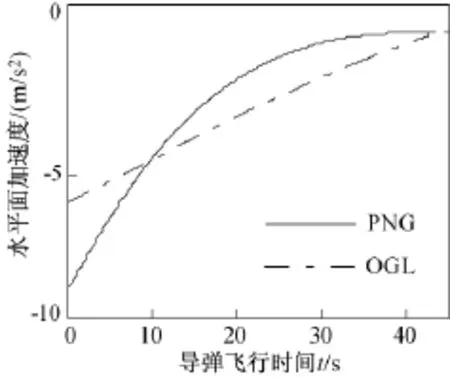
圖7 時間與水平平面加速度關(guān)系圖
仿真2:通過含落角約束的制導(dǎo)律驗證模型。假設(shè)導(dǎo)彈初始坐標(biāo)為(0,3 000,0),單位為米;導(dǎo)彈速度vm=300 m/s,在慣性坐標(biāo)系的彈道傾角θm=0°,彈道偏角ψm=0°,要求導(dǎo)彈擊中目標(biāo)時的速度傾角θmf=80°;目標(biāo)初始坐標(biāo)為(8 000,0,1 000),單位為米;目標(biāo)速度vt=0 m/s,沒有設(shè)置停控距離,對加速度也沒有限制。彈目三維運動軌跡如圖8所示。彈道以一定的彈道傾角擊中目標(biāo),脫靶量小于1 m,彈目交會時間為32.12 s。
圖9為垂直平面、水平面上加速度隨之間變化的曲線。從圖中可以看出,含有落角約束的制導(dǎo)律的加速度變化范圍遠(yuǎn)遠(yuǎn)超過比例導(dǎo)引,這是由于落角約束引起的。圖10為導(dǎo)彈傾角隨時間的變化曲線,從圖中可以看出,導(dǎo)彈的初始彈道傾角為0°,末端彈道傾角為80°,符合設(shè)計要求。
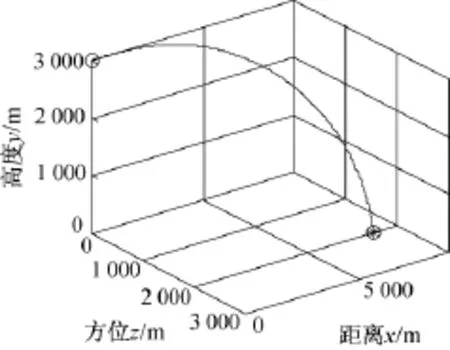
圖8 帶落角約束的制導(dǎo)律下的三維彈道曲線
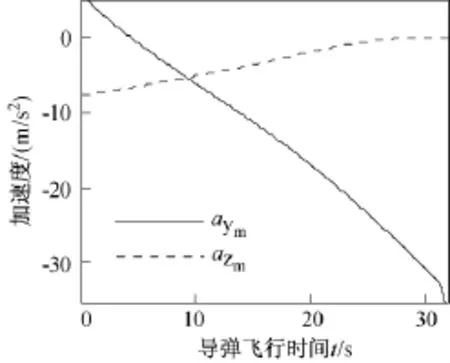
圖9 時間與加速度關(guān)系圖
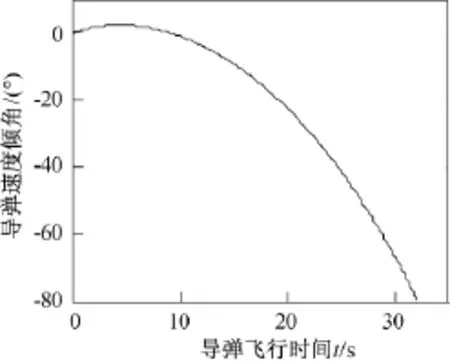
圖10 時間與導(dǎo)彈速度傾角關(guān)系圖
4 結(jié)束語
三維末制導(dǎo)律的研究與仿真是反艦導(dǎo)彈總體設(shè)計、效能評估的的必備步驟,由于制導(dǎo)律種類多、符號體系、坐標(biāo)體系多種多樣,給制導(dǎo)律系能研究和不同制導(dǎo)律的比較帶來很大的困難。本文采用二維解耦合的方法,將三維制導(dǎo)分解為垂直平面、水平面的制導(dǎo),分別在這兩個正交平面上實現(xiàn)不同的制導(dǎo)律,經(jīng)過運動軌跡的合成,能夠?qū)崿F(xiàn)三維末制導(dǎo)律的仿真。該分解具有層次清晰、結(jié)構(gòu)簡單的特點。對于反艦導(dǎo)彈打擊海面艦艇的場景,分別采用比例導(dǎo)引制導(dǎo)律、一種最優(yōu)制導(dǎo)律和一種含有落角約束的制導(dǎo)律,實現(xiàn)對該模型的驗證,給出了仿真模型的實現(xiàn)細(xì)節(jié)。仿真結(jié)果表明,該模型具有簡單、通用性的特點。通過修改模型中垂直平面加速度amy,水平面加速度amz的表達(dá)式,即可實現(xiàn)不同制導(dǎo)律的仿真,這有利于在實際工作中快速比較不同制導(dǎo)律的性能。
[1] 錢杏芳,林瑞雄,趙亞男.導(dǎo)彈飛行力學(xué)[M].北京:北京理工大學(xué)出版社,2006.
[2] 張友安,胡云安[M].北京:國防工業(yè)出版社,2003.
[3] 高尚.比例導(dǎo)引理想彈道仿真[J].計算機工程與設(shè)計,2003,24(8):66-68.
[4] 王穎,宋龍,張擁軍.制導(dǎo)滑翔炸彈的最優(yōu)末制導(dǎo)律研究[J].彈箭與制導(dǎo)學(xué)報,2010,30(4):51-54.
[5] 黃玲玲.巡航導(dǎo)彈的三維精確末制導(dǎo)律及三維動畫仿真研究[D].南京:南京航空航天大學(xué),2007.
[6] 王亞飛,方洋旺,周曉濱.比例導(dǎo)引律研究現(xiàn)狀及其發(fā)展[J].火力與指揮控制,2007,32(10):8-12.
[7] 趙紅超,王鳳蓮,顧文錦.超音速反艦導(dǎo)彈的最優(yōu)末制導(dǎo)律研究[J].航空兵器,2005,(3):8-11.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
