自抗擾算法在直流力矩電機伺服系統中的應用
2012-12-03 14:51:22龍滿林付永領李光華陳雙橋
中國機械工程 2012年9期
關鍵詞:模型
龍滿林 付永領 李光華 陳雙橋
1.北京航空航天大學,北京,100191 2.海軍工程大學,武漢,430033
0 引言
直流力矩電機因具有力矩電流比率高、過載能力強、可靠性高、控制簡便等特點,被廣泛應用于伺服控制中。為了進一步提高直流力矩電機伺服系統性能,學者們進行了諸多研究。研究結果表明,對于高精度伺服系統而言,摩擦力矩是影響系統伺服性能的主要因素。這是因為摩擦力矩具有非線性、不確定性、滯后性的特點,直接惡化伺服系統的動靜態性能,造成伺服系統低速運動時爬行、速度過零時波形畸變、存在穩態誤差或振蕩[1],因此,大多數學者把研究重點放在了消除摩擦力矩影響上,提出了許多摩擦補償方法。基于摩擦超前補償模型的PID控制方法是其中最具代表性的補償方法,該方法僅考慮摩擦力矩的影響,需要建立精確的摩擦模型。摩擦模型的研究主要集中于靜態Stribeck模型和動態LuGre模型,而這兩種模型中需要辨識的參數多而且部分不可測,所以難以確保模型的精確性并給出精確的補償值。文獻[2]在靜態Stribeck模型基礎上,提出了自適應摩擦補償算法。該算法依賴于一些狀態變量的重構,而且控制律復雜,實際應用效果受到影響。文獻[3]利用遺傳算法尋優的功能辨識動態LuGre模型的參數,該算法在實際應用中存在兩個缺陷:①若種群規模過小,則會影響尋優的效果;②若種群規模過大,則過長的算法運行時間難以實現在線優化。此外,由于摩擦力矩是速度的函數,直流力矩電機超低速運行和過速度零點時得不到精確的速度信號,所以難以建立摩擦模型。這些原因都會降低摩擦模型的精度,直接惡化伺服性能。
此外,影響直流力矩電機伺服系統精度的因素還有電機周期性波動力矩、模型參數時變特性、負載波動和反饋元件誤差等。這些影響因素在仿真中很難建立精確模型,在實際使用時不能采用常規算法進行估計預測,因而不可能給出準確的補償值,致使系統不能獲得高的伺服精度。為了提高伺服精度,應對這些內在或外加的不利影響因素進行有效的消除或補償。
因此,為了使直流力矩電機伺服系統達到期望的伺服精度,必須綜合考慮摩擦力矩、電機周期性波動力矩、模型參數時變特性、負載波動和反饋元件誤差等因素的影響,缺一不可。然而,它們各自的精確模型很難建立,更不可能實時獲得精確的補償值。針對這一難點,本文引入自抗擾算法,該算法可以將摩擦力矩、電機周期性波動力矩、模型參數時變特性、負載波動和反饋元件誤差等影響因素總和成唯一的總擾動,構造擴張狀態觀測器,實時觀測重構并補償這一總擾動。只要準確補償了總擾動,伺服系統的控制精度就能得到大幅提高。
1 直流力矩電機伺服系統特性分析
北京航空航天大學流體傳動與控制技術研發中心配備有某型進口三軸電液復合飛行仿真轉臺,其內框是典型的直流力矩電機伺服系統。本文以該系統為例,僅從控制角度出發,引入自抗擾算法,以期進一步提高系統的伺服精度。該伺服系統的結構如圖1所示,其控制原理為:測速電機測得的角速度信號和光電編碼器測得的角位移信號經數據采集卡輸入到工控機中,與相應的期望值相減得到誤差,這些誤差按照控制算法經過A/D轉換生成控制電壓U,控制電壓U 經PWM功率放大板放大成均值電壓為Um的PWM方波,PWM方波驅動直流力矩電機,使其帶動轉臺內框及負載一起轉動,轉角為θ。
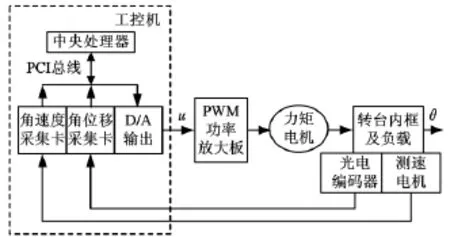
圖1 直流力矩電機伺服系統硬件構成示意圖
針對圖1,建立直流力矩電機伺服系統的數學模型。電機的電壓、轉矩、負載的數學模型[4]分別如下:
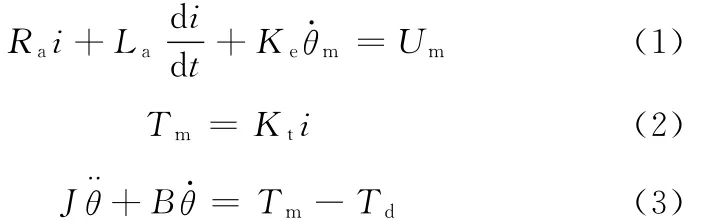
式中,Ra為電樞電阻;La為電樞電感;i為電樞電流;Ke為反電動勢系數;θm為電機轉角;θ為內框轉角,θ=θm;Tm為電機輸出力矩;Kt為電磁轉矩常數;J為等效到電機軸的轉動慣量(包含負載的轉動慣量在內);B為等效的黏性阻尼系數;Td為總擾動,包含摩擦力矩、電機周期性波動力矩、模型參數時變特性、負載波動和反饋元件誤差等影響因素。
對式(1)~式(3)進行拉氏變換,消除中間變量,得到系統的傳遞函數方框圖(圖2)。控制器取位置差形成控制律f(θr-θ)。KPWM為PWM功率放大器的放大比例系數。從圖2可以看出,Td中的每一分項都與直流力矩電機直接關聯,對伺服精度都有影響,在仿真和實驗中必須消除。
圖2 直流力矩電機伺服系統傳遞函數方框圖
2 自抗擾算法設計
基于自抗擾算法的控制器由跟蹤微分器、擴張狀態觀測器和反饋控制律三部分組成。跟蹤微分器根據系統的控制性能要求,安排期望輸入θr的系統過渡過程,以避免系統超調,同時產生期望輸入的微分信號。擴張狀態觀測器估計系統的狀態變量和總擾動。反饋控制律依據擴張狀態觀測器和微分跟蹤器給出的實時值構造控制量U,以補償總擾動Td。由于圖2中的直流力矩電機伺服系統已經簡化為二階系統,故自抗擾控制器中的擴張狀態觀測器增加一階,用來估計系統的總擾動Td。針對此系統設計的自抗擾控制器如圖3所示。
2.1 跟蹤微分器設計
跟蹤微分器為直流力矩電機伺服系統的期望輸入θr安排過渡過程,得到光滑的輸入信號v1及其微分信號v2。跟蹤微分器的離散算法如下[5]:
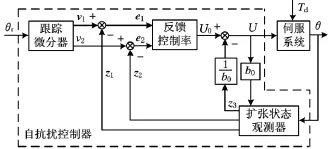
圖3 直流力矩電機伺服系統自抗擾控制器結構圖
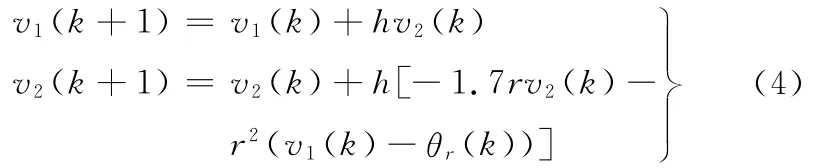
其中,h為仿真中的步長,實際控制中的采樣時間;r為速度因子,決定跟蹤的快慢,r越大,過渡過程越快,此參數需要被整定。
2.2 擴張狀態觀測器設計
構造擴張狀態觀測器得到伺服系統的狀態z1、z2和總擾動的實時作用量z3。擴張狀態觀測器的離散算法如下:
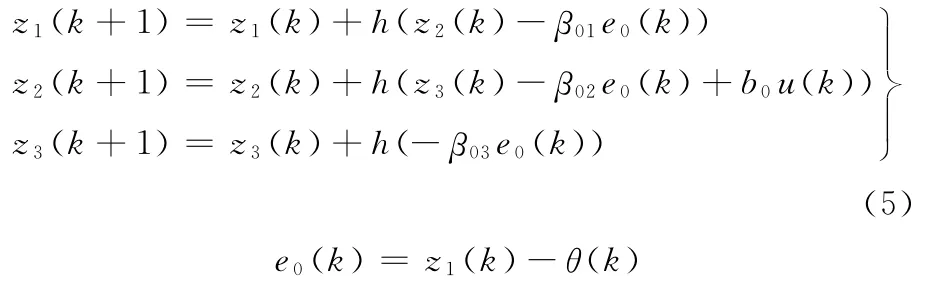
其中,z1為對直流力矩電機伺服系統轉角θ的估計;z2為對直流力矩電機伺服系統轉角的微分估計,為控制律的生成提供微分信號,用來構造誤差的微分;β01、β02、β03、b0為可調參數,需要被整定。
2.3 反饋控制律設計
狀態誤差反饋控制律是利用跟蹤微分器輸出和擴張狀態觀測器輸出之差,即廣義輸入與伺服系統的廣義輸出之間的誤差產生伺服系統所需要的控制量對總擾動Td進行實時補償。其功能相當于用反饋線性化方法,將直流力矩電機伺服系統由非線性系統轉化為“積分器串聯型”系統。反饋控制律的離散算法如下:

其中,β1、β2為控制器參數,需要被整定。
3 仿真研究
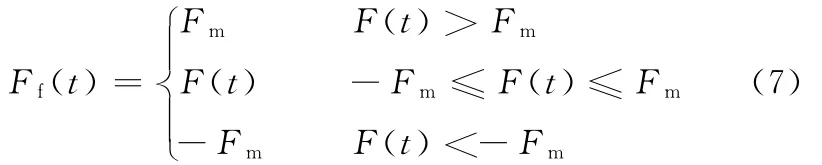
縱觀自抗擾控制器,共有7個參數需要被整定。為了整定這些參數,需要對直流力矩電機驅動的轉臺內框進行仿真。仿真中,摩擦力矩采用靜態Stribeck模型[1],表達式如下:

電機周期性波動力矩、模型參數時變特性、負載波動和反饋元件誤差等非線性和隨機性影響因素引起的擾動用隨機值rand(1)來表示,那么,總擾動用下式表示:

期望輸入選用正弦函數,表達式用下式表示:

直流力矩電機伺服系統相關參數值為Ra=0.7Ω,La=7mH,Kt= 2.95N · m/A,Ke=2.9V·s/rad,J=3.2kg·m2,B =0.01N·m·s/rad,KPWM=2.65。靜態Stribeck模型參數為Fc=3N·m,Fm=5N·m,α1=1,α=0.01,kv=2N·m·s/rad。經過多輪仿真實驗,對比分析仿真結果,使跟蹤誤差的方差最小的自抗擾控制器參數經取整后為β01=15,β02=15 000,β03=10,β1=300,β2=50,b0=12,r=500。仿真結果見圖4。圖4中,總干擾Td在[-8,8]N·m的范圍內變化,其值過零點時正負號交替,且發生突變,這是由于直流力矩電機運動方向改變導致摩擦力矩換向所致。跟蹤曲線中實際輸出曲線與期望輸入曲線吻合,未出現常規PID控制中容易出現的極限環、平頂等不良現象[1]。控制電壓在直流力矩電機剛開始運動時波動較大,當直流力矩電機啟動后,控制電壓在[-1.5,1.5]V的范圍內波動。跟蹤誤差曲線在[-0.6×103,0.6×103]rad范圍內波動。從跟蹤曲線和跟蹤誤差曲線上看,伺服控制的效果好。

圖4 仿真結果
4 實驗研究
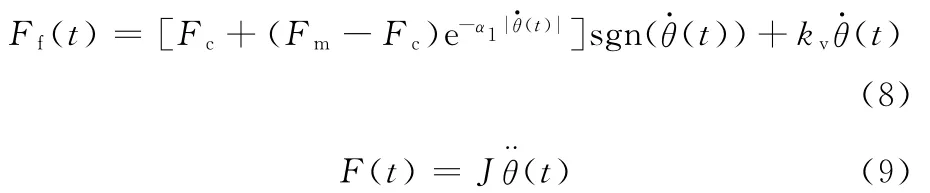
將仿真中整定的控制器參數直接應用到直流力矩電機驅動的轉臺內框上,期望輸入為式(11),實驗結果見圖5,從跟蹤曲線來看,控制效果好。不改變控制器參數,也不改變期望輸入的幅值,逐漸增加期望輸入的頻率,最高跟蹤頻率達2Hz,2Hz時的跟蹤曲線見圖6。超過2Hz后,跟蹤效果不佳。因此,在同一組控制器參數的作用下,系統跟蹤頻率在0.2~2Hz范圍內的正弦信號的效果良好。不改變控制器參數,期望輸入信號的頻率仍為0.2Hz,逐漸增大期望輸入的幅值到1rad,跟蹤曲線見圖7,跟蹤效果仍然很好。
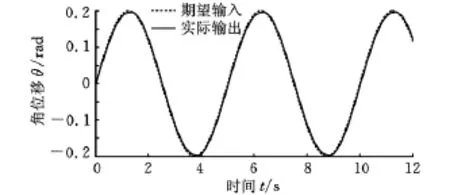
圖5 實驗結果
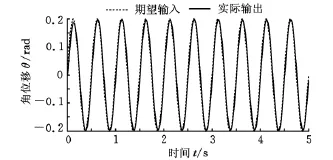
圖6 實驗結果
圖7 實驗結果
從圖5~圖7的實測結果可以看出,在保持自抗擾控制器的7個參數不變的情況下,在較大范圍內改變期望輸入,跟蹤效果仍然很好,說明自抗擾算法的魯棒性強。
5 結語
從仿真和實驗的結果可知,利用自抗擾算法對直流力矩電機伺服系統進行控制時,可將影響伺服系統跟蹤精度的內在或外在的影響因素總和成一個綜合的外部擾動,即總擾動,并對其進行實時估計和補償。這種控制方法不用分析影響因素的特性,也不用費時費力地建立應用效果不佳的模型。自抗擾算法的難點在于控制器參數的整定。可采用針對系統的名義模型在苛刻的干擾條件下進行仿真研究的方法整定控制器參數,參數的優化過程可借助于如遺傳算法之類的優化方法。當參數被整定后,對于仿真條件或實際系統在一定范圍內發生變化的情況,自抗擾算法均具有良好的應用效果,據此可見自抗擾算法魯棒性強,具有優良的工程應用性。
[1]劉金錕.先進PID控制 MATLAB仿真[M].2版.北京:電子工業出版社,2007.
[2]王忠山,王毅,蘇寶庫.一種精密轉臺系統自適應摩擦補償方法[J].華南理工大學學報(自然科學版),2007,35(9):55-59.
[3]焦竹青,屈百達,徐保國.基于遺傳算法的直流伺服電機的摩擦補償[J].清華大學學報,2007,47(2):1875-1879.
[4]牛建軍,付永領,劉和松.高精確度飛行仿真轉臺內框控制摩擦補償研究[J].電機與控制學報,2008,12(5):576-579.
[5]史永麗,侯朝楨.基于自抗擾控制的伺服系統摩擦補償研究[J].計算機工程與應用,2007,43(29):201-203.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19