大型復(fù)雜結(jié)構(gòu)損傷識(shí)別兩步法研究
2012-12-03 14:51:22李世龍王天輝馬立元李永軍
中國(guó)機(jī)械工程 2012年9期
李世龍 王天輝 馬立元 李永軍
軍械工程學(xué)院,石家莊,050003
0 引言
近幾十年來(lái),國(guó)內(nèi)外學(xué)者在基于振動(dòng)的結(jié)構(gòu)損傷識(shí)別領(lǐng)域開(kāi)展了大量卓有成效的研究工作,并已經(jīng)研究得出很多結(jié)構(gòu)損傷識(shí)別方法。常用的方法主要包括基于模態(tài)頻率和振型的方法[1]、基于柔度曲率的方法[2]、基于應(yīng)變模態(tài)的方法[3]、基于模態(tài)應(yīng)變能的方法[4]、基于結(jié)構(gòu)有限元模型修正的方法[5],以及基于人工神經(jīng)網(wǎng)絡(luò)的智能識(shí)別方法[6]等。然而,由于結(jié)構(gòu)損傷識(shí)別受到如測(cè)量噪聲、建模誤差、傳感器布置數(shù)目有限等諸多因素的綜合影響,目前尚不存在一種對(duì)各種結(jié)構(gòu)都適用且有效的識(shí)別方法,各種方法都有其適用范圍和局限性,并且大都只適用于一些簡(jiǎn)單的結(jié)構(gòu)。
目前,對(duì)于導(dǎo)彈發(fā)射臺(tái)骨架這種大型復(fù)雜結(jié)構(gòu),仍很少有較為成功的損傷識(shí)別方法。本文研究了利用結(jié)構(gòu)的動(dòng)力測(cè)試數(shù)據(jù)進(jìn)行發(fā)射臺(tái)骨架損傷識(shí)別的方法,通過(guò)將基于模型修正的損傷識(shí)別方法與模態(tài)柔度曲率差方法相結(jié)合,提出一種能較好解決這種大型復(fù)雜結(jié)構(gòu)損傷識(shí)別問(wèn)題的兩步法:第一步,運(yùn)用基于模型修正的損傷識(shí)別方法對(duì)損傷進(jìn)行模糊識(shí)別,識(shí)別出損傷屬于結(jié)構(gòu)的哪個(gè)單元組;第二步,運(yùn)用模態(tài)柔度曲率差方法,對(duì)損傷進(jìn)行精確定位。仿真算例及試驗(yàn)驗(yàn)證結(jié)果表明,本文提出的損傷識(shí)別兩步法識(shí)別效果較為理想,為解決大型復(fù)雜結(jié)構(gòu)的損傷識(shí)別問(wèn)題提供了新思路。
1 基于模型修正的結(jié)構(gòu)損傷識(shí)別
筆者基于模型修正技術(shù)提出了一種新的結(jié)構(gòu)損傷識(shí)別方法,該方法通過(guò)建立帶邊界約束的非線性最小二乘目標(biāo)函數(shù),將損傷識(shí)別問(wèn)題轉(zhuǎn)化為優(yōu)化問(wèn)題,然后采用具有全局快速收斂特性的信賴(lài)域方法[7-8]對(duì)該優(yōu)化問(wèn)題進(jìn)行求解,從而可以快速準(zhǔn)確地識(shí)別出結(jié)構(gòu)有限元模型(FEM)各單元組的剛度降低系數(shù),即實(shí)現(xiàn)對(duì)結(jié)構(gòu)的損傷識(shí)別。
1.1 方法的理論基礎(chǔ)
結(jié)構(gòu)損傷會(huì)導(dǎo)致結(jié)構(gòu)剛度降低,于是結(jié)構(gòu)整體剛度矩陣可以表示為

式中,K0、K 為結(jié)構(gòu)損傷前后的整體剛度矩陣;K(i)為結(jié)構(gòu)有限元模型中第i單元的單元擴(kuò)階矩陣;θi為Ne維單元?jiǎng)偠冉档拖禂?shù)(stiffness reduction coefficients,SRC)向量;Ne為有限元模型中的單元總數(shù)。
SRC在本文中代表各單元彈性模量的降低量,用來(lái)表征損傷程度的大小。
1.1.1 目標(biāo)函數(shù)的建立
為了極小化有限元模型的計(jì)算模態(tài)與結(jié)構(gòu)實(shí)測(cè)模態(tài)的差別,目標(biāo)函數(shù)被定義為一個(gè)帶邊界約束的非線性最小二乘的形式:
其中,向量l、u∈RNe為待識(shí)別參數(shù)θ的上下邊界。為了滿足結(jié)構(gòu)損傷識(shí)別的要求,l和u的所有元素都分別被置為0和1。Nm維目標(biāo)函數(shù)向量r(θ)由頻率和振型兩部分信息組成,表示如下:

其中,fj(θ)、φ(j)(θ)分別表示第j階自振頻率及振型,上標(biāo)“^”表示該參數(shù)實(shí)測(cè)模態(tài)數(shù)據(jù),Nm維向量rf(θ)用來(lái)衡量各階自振頻率的相近程度,Nm維向量rφ(θ)用來(lái)衡量各階振型的相近程度,它包含各階振型的模態(tài)置信度(modal assurance criterion,MAC)。模態(tài)置信度用于描述振型的相關(guān)程度。
當(dāng)采用式(2)所示的最小二乘形式時(shí),目標(biāo)函數(shù)的梯度向量和Hessian矩陣都具有其特殊的簡(jiǎn)化形式,即均可用一階偏導(dǎo)形式的Jocabian矩陣來(lái)表示,克服了每次迭代中需計(jì)算二次導(dǎo)數(shù)矩陣(Hessian矩陣)的困難,很大程度上提高了計(jì)算效率。
1.1.2 目標(biāo)函數(shù)的求解
由于信賴(lài)域方法既具有牛頓法的快速局部收斂性,又具有理想的全局收斂性,因而本文采用信賴(lài)域算法求解上述帶邊界約束的非線性最小二乘問(wèn)題,從而識(shí)別結(jié)構(gòu)各單元組剛度降低系數(shù)。收斂準(zhǔn)則定義為:|(f(θk)-f(θk-1))/f(θk-1)|<ε,即目標(biāo)函數(shù)的前后兩次迭代值誤差小于某一給定精度。本文收斂精度ε取為1.0×10-6。
1.2 數(shù)值仿真及試驗(yàn)研究
1.2.1 發(fā)射臺(tái)骨架的模態(tài)試驗(yàn)
試驗(yàn)時(shí),將發(fā)射臺(tái)骨架離散為25個(gè)節(jié)點(diǎn),每個(gè)節(jié)點(diǎn)按3個(gè)自由度考慮,以便獲取發(fā)射臺(tái)骨架的三維模態(tài)。根據(jù)發(fā)射臺(tái)骨架模型的幾何特點(diǎn),選取其中的15個(gè)節(jié)點(diǎn)作為測(cè)量點(diǎn),共測(cè)量28個(gè)自由度方向。各測(cè)點(diǎn)的自由度分布見(jiàn)表1。
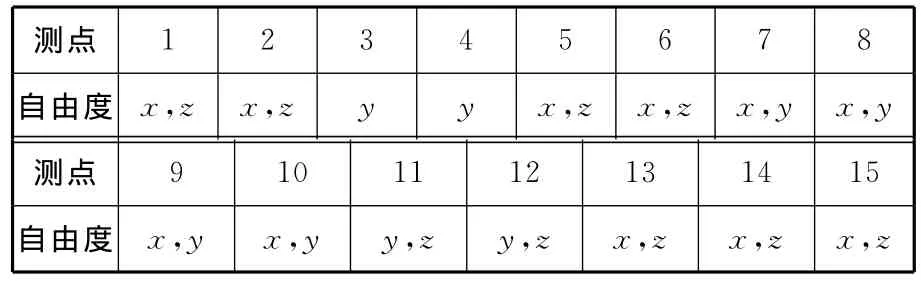
表1 發(fā)射臺(tái)骨架各測(cè)點(diǎn)自由度分布
用橡膠繩將模型懸吊起來(lái),使其處于“自由狀態(tài)”(無(wú)邊界約束狀態(tài))。采用錘擊法進(jìn)行激振,單點(diǎn)激勵(lì),多點(diǎn)響應(yīng)。采樣頻率為10kHz,每個(gè)響應(yīng)信號(hào)取2048個(gè)采樣點(diǎn)。加速度信號(hào)經(jīng)電荷放大器放大進(jìn)入DH5920動(dòng)態(tài)信號(hào)測(cè)試分析系統(tǒng),測(cè)試分析軟件采用東華模態(tài)分析軟件(DHMA)。本發(fā)射臺(tái)骨架模型的測(cè)點(diǎn)編號(hào)分布及試驗(yàn)現(xiàn)場(chǎng)如圖1所示。
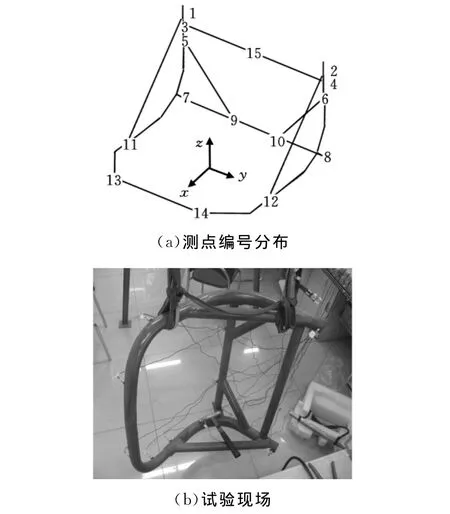
圖1 發(fā)射臺(tái)骨架模型的測(cè)點(diǎn)編號(hào)分布及試驗(yàn)現(xiàn)場(chǎng)
1.2.2 發(fā)射臺(tái)骨架的有限元建模及修正
為了獲得與實(shí)際結(jié)構(gòu)的動(dòng)力特性比較接近的有限元模型,本文建立了發(fā)射臺(tái)骨架的三維實(shí)體有限元模型,如圖2所示。但是在這種情況下,整個(gè)數(shù)值模型太過(guò)于復(fù)雜和龐大,單元、節(jié)點(diǎn)及自由度數(shù)目相當(dāng)可觀,采用信賴(lài)域算法對(duì)其進(jìn)行反復(fù)迭代計(jì)算及修正時(shí),計(jì)算量相當(dāng)大。因此在模型修正及損傷識(shí)別的第一步中,本文對(duì)該模型進(jìn)行了單元分組,將各個(gè)單元組作為一個(gè)整體來(lái)進(jìn)行模型修正及損傷識(shí)別。
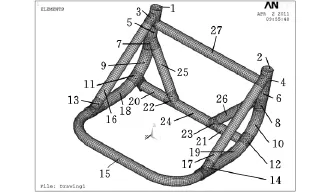
圖2 發(fā)射臺(tái)骨架有限元模型及單元組劃分
由于本文建立的有限元模型的幾何尺寸(截面特性及各部件長(zhǎng)度等)及材料特性等均是按設(shè)計(jì)要求完成的,所以這些因素在模型修正過(guò)程中可以不予考慮。本模型為鋼管焊接結(jié)構(gòu),具有多個(gè)焊縫,焊接過(guò)程中焊縫及其周?chē)牧系奶匦宰兓^大,這將成為有限元模型誤差的主要來(lái)源。
運(yùn)用上文提出的模型修正方法,對(duì)發(fā)射臺(tái)骨架焊接節(jié)點(diǎn)上各單元組(3,4,7,8,11,12,13,14,22,23)的材料特性進(jìn)行修正,修正后有限元模型的計(jì)算模態(tài)和實(shí)測(cè)模態(tài)的比較見(jiàn)表2。從表2可以看出,修正后的有限元模型的計(jì)算模態(tài)和實(shí)測(cè)模態(tài)很接近,說(shuō)明該有限元模型可用于后續(xù)的損傷識(shí)別。
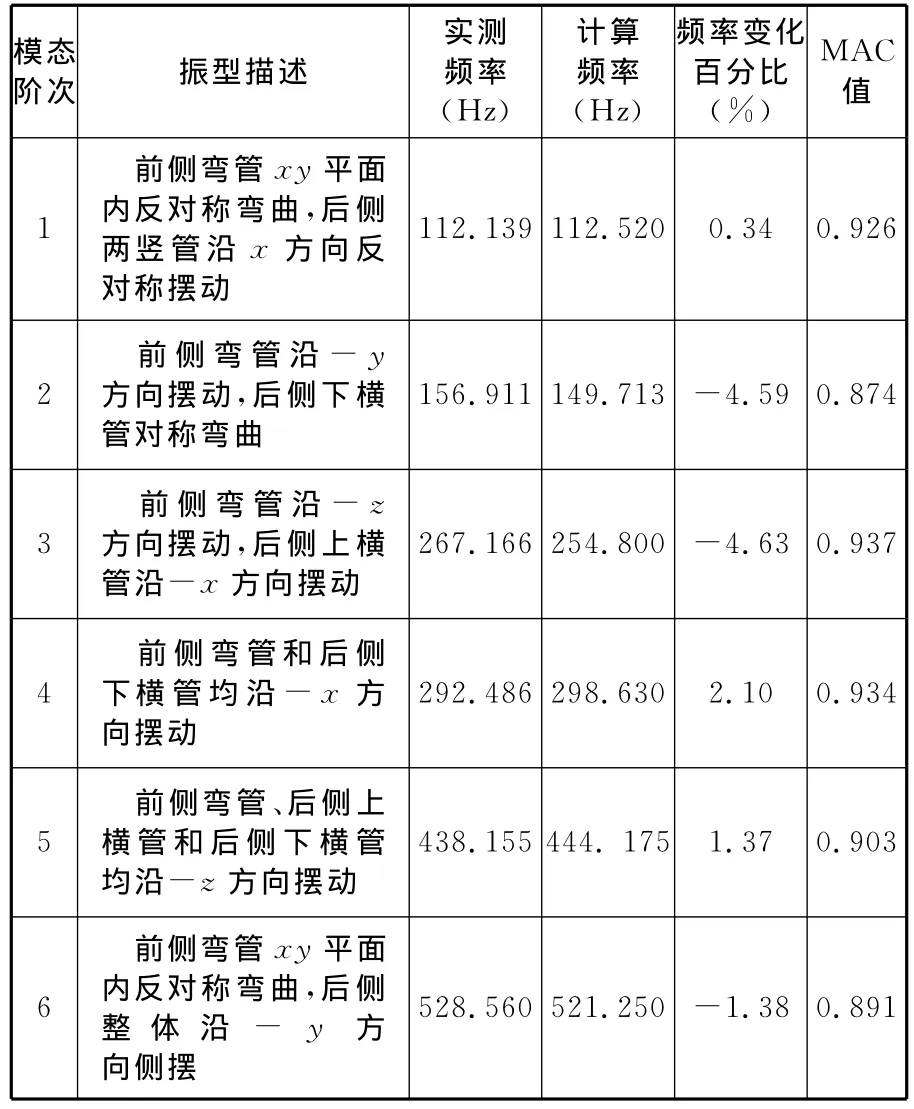
表2 修正后有限元模型的計(jì)算模態(tài)和實(shí)測(cè)模態(tài)的比較
1.2.3 損傷識(shí)別數(shù)值仿真研究
(1)損傷工況設(shè)置。本文對(duì)發(fā)射臺(tái)骨架單損傷(工況1)、兩損傷(工況2)和微小損傷(工況3)3種工況進(jìn)行數(shù)值仿真研究。其中,工況1假定24號(hào)單元組發(fā)生30%的損傷(剛度降低30%);工況2假定在單元組24和27處均發(fā)生30%的損傷;工況3假定24號(hào)單元組僅發(fā)生10%的損傷。表3表示3種工況下發(fā)射臺(tái)骨架模型損傷前后的頻率變化。從該表中可以看出,工況3的各階頻率變化都不明顯。從這里就可以看出,在這種微小損傷引起的頻率改變不明顯的情況下,僅利用頻率進(jìn)行損傷識(shí)別是不夠的,還需要將頻率與振型一起利用起來(lái)進(jìn)行損傷識(shí)別。本文所提出的方法正是同時(shí)利用了頻率與振型信息。

表3 發(fā)射臺(tái)骨架有限元模型損傷前后的模態(tài)頻率及其變化
(2)損傷識(shí)別結(jié)果分析。通過(guò)定義剛度降低系數(shù)來(lái)反映各單元組損傷的程度。從3種損傷工況的識(shí)別結(jié)果(圖3)可以看出,本文所提出的方法對(duì)于發(fā)射臺(tái)骨架這樣的大型復(fù)雜結(jié)構(gòu)的損傷識(shí)別是可行的。特別對(duì)于工況3下的微小損傷,本方法也取得了較好的識(shí)別效果,說(shuō)明本文提出的損傷識(shí)別方法具有較高的靈敏度。
1.2.4 損傷識(shí)別試驗(yàn)數(shù)據(jù)驗(yàn)證
(1)損傷工況設(shè)置。對(duì)發(fā)射臺(tái)骨架試驗(yàn)?zāi)P腿栽O(shè)置了3種損傷工況,分別如下:①24號(hào)單元組從左至右1/4處被切開(kāi),深度為鋼管外半徑的一半(a=12mm),如圖4所示;②24號(hào)和27號(hào)單元組從左至右1/4處均被切開(kāi),深度均為鋼管外半徑的一半;③24號(hào)單元組從左至右1/4處被切開(kāi),深度僅為鋼管的壁厚(a=5mm)。發(fā)射臺(tái)骨架試驗(yàn)?zāi)P蛽p傷前后實(shí)測(cè)頻率和振型的比較分別見(jiàn)表4和表5。
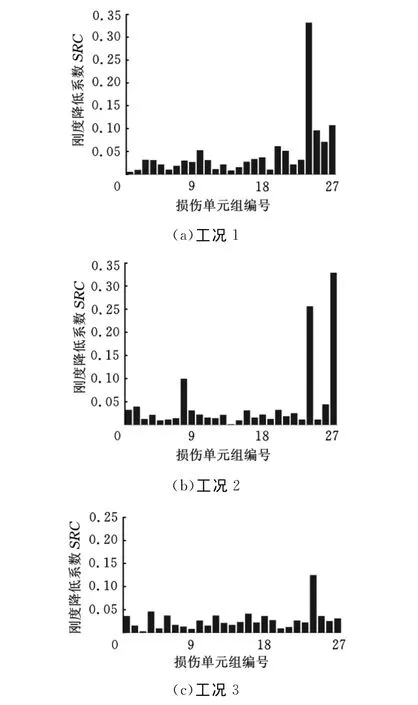
圖3 損傷識(shí)別結(jié)果
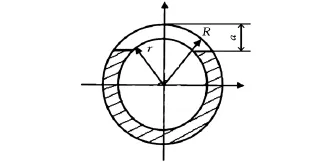
圖4 鋼管損傷后截面示意圖

表4 發(fā)射臺(tái)骨架損傷前后實(shí)測(cè)頻率(Hz)比較
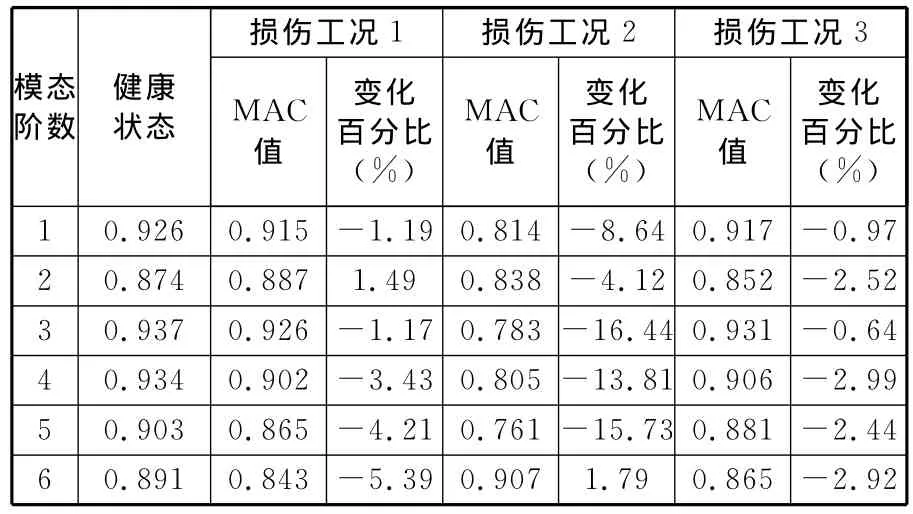
表5 發(fā)射臺(tái)骨架損傷前后實(shí)測(cè)振型與修正后有限元模型之間的MAC值比較
(2)損傷識(shí)別結(jié)果分析。從三種工況的損傷識(shí)別結(jié)果(圖5)可以看出,實(shí)際發(fā)生損傷的單元組基本可以識(shí)別出來(lái)。特別對(duì)于工況3下的微小損傷,由于本方法充分利用了損傷前后的振型和頻率信息,也實(shí)現(xiàn)了損傷的識(shí)別,說(shuō)明本文提出的損傷識(shí)別方法具有較高的靈敏度。但由于發(fā)射臺(tái)骨架結(jié)構(gòu)本身的復(fù)雜性及模態(tài)試驗(yàn)中存在的誤差等原因,識(shí)別結(jié)果還不夠清晰。

圖5 損傷識(shí)別結(jié)果
2 基于模態(tài)柔度曲率差的結(jié)構(gòu)損傷識(shí)別
上文運(yùn)用基于模型的損傷識(shí)別方法對(duì)發(fā)射臺(tái)骨架進(jìn)行了損傷的模糊識(shí)別,得出了損傷屬于哪個(gè)單元組,但具體位置還不夠精確,下面運(yùn)用基于模態(tài)柔度曲率差的損傷識(shí)別方法對(duì)損傷進(jìn)行精確定位。
Pandey等[9]的研究表明:利用柔度矩陣的改變量對(duì)結(jié)構(gòu)進(jìn)行損傷識(shí)別,比固有頻率或振型對(duì)局部損傷進(jìn)行識(shí)別更敏感。本文在前人的基礎(chǔ)上,提出了一種識(shí)別結(jié)構(gòu)局部損傷的新方法——模態(tài)柔度曲率差方法。
2.1 方法介紹
本方法在求模態(tài)柔度曲率差之前,先求損傷前后模態(tài)柔度的曲率矩陣Fu和Fd,其元素計(jì)算如下:
式中,F(xiàn)uj(i)、Fdj(i)分別為損傷前、損傷后柔度矩陣第j列第i行的元素;li為第i單元的長(zhǎng)度。
模態(tài)柔度的曲率矩陣差值為

將曲率差矩陣ΔF中每行按節(jié)點(diǎn)進(jìn)行疊加取平均值,再按節(jié)點(diǎn)將均值組成新的列矩陣:

式 中,i 為 節(jié) 點(diǎn) 或 測(cè) 點(diǎn),i = 1,2,…,n;Δmax為 Δi的最大值。
ρ0與節(jié)點(diǎn)位置一一對(duì)應(yīng),其大小反映了結(jié)構(gòu)損傷后柔度曲率變化的急劇程度,稱(chēng)為模態(tài)柔度曲率差。當(dāng)結(jié)構(gòu)局部出現(xiàn)損傷時(shí),結(jié)構(gòu)的局部剛度降低、局部柔度增大,損傷位置的柔度曲率亦增大。如果相鄰兩節(jié)點(diǎn)處的模態(tài)柔度曲率差遠(yuǎn)大于其余節(jié)點(diǎn)的模態(tài)柔度曲率差,則這兩點(diǎn)之間的單元就是損傷單元。
2.2 試驗(yàn)及結(jié)果分析
將單元組27劃分為15個(gè)小組,從左至右共布置16個(gè)傳感器(圖6),測(cè)量其損傷前后的局部模態(tài),提取結(jié)構(gòu)的前幾階固有頻率和局部振型。測(cè)量總共進(jìn)行兩次,測(cè)量自由度首先為x方向,待測(cè)量完畢后將傳感器調(diào)整為z方向。根據(jù)式(6)~式(10),編制 MATLAB程序,繪制模態(tài)柔度曲率差ρ0隨節(jié)點(diǎn)變化的二維曲線,并將兩次測(cè)量結(jié)果所得曲線進(jìn)行擬合,則曲線突變處將指示出損傷的精確位置(圖7)。
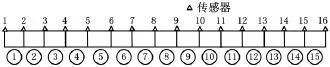
圖6 單元組27的分組及傳感器布置
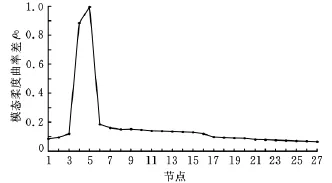
圖7 模態(tài)柔度曲率差損傷識(shí)別結(jié)果
工況2中27號(hào)單元組的實(shí)際損傷位置設(shè)置在從左至右四分之一處,即位于節(jié)點(diǎn)4和節(jié)點(diǎn)5之間。從模態(tài)柔度曲率差的識(shí)別結(jié)果可以看出,節(jié)點(diǎn)4和5處曲線突變很明顯,因此運(yùn)用模態(tài)柔度曲率差方法可以實(shí)現(xiàn)損傷的精確定位。
3 結(jié)語(yǔ)
本文提出了一種基于模型修正和模態(tài)柔度曲率差的大型復(fù)雜結(jié)構(gòu)損傷識(shí)別兩步法。該方法將損傷識(shí)別分為兩步:第一步,運(yùn)用基于模型修正的損傷識(shí)別方法對(duì)結(jié)構(gòu)損傷進(jìn)行模糊識(shí)別,識(shí)別出損傷屬于結(jié)構(gòu)的哪個(gè)單元組;第二步,運(yùn)用模態(tài)柔度曲率差方法,對(duì)損傷進(jìn)行精確定位。對(duì)某導(dǎo)彈發(fā)射臺(tái)骨架的數(shù)值仿真及試驗(yàn)研究結(jié)果表明,本文提出的損傷識(shí)別兩步法識(shí)別效果較為理想,為解決大型復(fù)雜結(jié)構(gòu)的損傷識(shí)別問(wèn)題提供了新的思路。
[1]Shi Z Y,Law S S,Zhang L M.Damage Localization by Directly Using Incomplete Mode Shapes[J].Journal of Engineering Mechanics-ASCE,2000,126(6):656-660.
[2]瞿偉廉,陳超.基于應(yīng)變模態(tài)的鋼結(jié)構(gòu)構(gòu)件焊縫損傷定位方法的研究[J].世界地震工程,2002,18(2):2-7.
[3]曹暉,張新亮,李英民.利用模態(tài)柔度曲率差識(shí)別框架的損傷[J].振動(dòng)與沖擊,2007,26(6):116-120.
[4]Law S S,Shi Z Y,Zhang L M.Structural Damage Detection from Incomplete and Noisy Modal Test Data[J].Journal of Engineering Mechanics-ASCE,1998,124(11):1280-1288.
[5]徐偉華,劉濟(jì)科.基于移動(dòng)載荷響應(yīng)的多跨連續(xù)橋梁損傷檢測(cè)[J].力學(xué)與實(shí)踐,2008,30(5):49-52.
[6]張德海,朱浮聲.結(jié)構(gòu)損傷智能診斷研究進(jìn)展[J].力學(xué)與實(shí)踐,2003,25(4):1-5.
[7]Conn A R,Gould N I M,Toint P L.Trust-region Methods(MPS/SIAM Series on Optimization)[M].Philadelphia:Society for Industrial Mathematics,1987.
[8]Branch M A,Coleman T F,Li Y.A Subspace Interior and Conjugate Gradient Method for Large-scale Bound-constrained Minimization Problems[J].SIAM Journal on Scientific Computing,1999,21(1):1-23.
[9]Pandey A K,Biswas M.Damage Detection in Structures Using Changes in Flexibility[J].Journal of Sound and Vibration,1994,169(1):3-17.
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
計(jì)算物理(2014年2期)2014-03-11 17:01:39
機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18