自適應磁流變懸架半主動控制研究
2012-12-03 14:51:30蔣學爭胡紅生宋宏偉
中國機械工程 2012年9期
蔣學爭 胡紅生,2 宋宏偉 王 炅
1.南京理工大學,南京,210094 2.嘉興學院,嘉興,314001
0 引言
磁流變液是一種在外加磁場作用下其黏性、塑性等流變特性會發生急劇變化的智能材料,其基本特征是在外加磁場作用下能瞬間(毫秒級)從自由流動的液體轉變為半固體,呈現可控的屈服強度,而且這種變化是可逆的。磁流變減振器是以磁流變液為工作介質的半主動振動控制結構,具有結構簡單、響應速度快、阻尼力連續順逆可調以及方便與計算機控制結合等優點[1],因此廣泛應用于結構振動半主動控制領域[2-4]。特別是在汽車振動控制領域,以磁流變減振器為執行元件的磁流變半主動懸架系統已經成為提高汽車舒適性和安全性的研究熱點[5-8],并且已經有成品開始裝備到高級轎車上[9]。目前研究的磁流變半主動懸架系統需要一套電源設備來給磁流變減振器活塞線圈提供電流,同時還需要一套控制系統,以便能夠根據路面激勵和懸架響應來實時地調節輸入電流的大小,從而保證磁流變減振器能夠根據外界振動條件的變化適時地改變磁流變減振器輸出阻尼力[10],以實現對汽車懸架振動的智能控制。然而在實際應用過程中,外加的電源和控制設備會使整個控制系統的體積增大,重量增加,從而大大降低系統的可靠性,同時也會增加應用成本,從而制約磁流變半主動懸架技術的進一步發展。針對此問題,本文提出了一種無需外部電源和控制設備的新型磁流變減振器。
1 新型磁流變減振器
1.1 結構設計
本文所設計的無需外部電源和控制設備的新型磁流變減振器包括電磁感應能量捕獲結構和電能調理模塊,能夠將外界振動能轉換成適合磁流變阻尼器使用的穩壓直流電,并且收集電能的大小與外界振動強弱成正比關系,從而可以在無外電流輸入的情況下根據振動情況實時地改變減振器輸出阻尼力,實現對振動的自適應智能控制,其結構如圖1所示。它主要由磁流變減振器結構、電磁感應能量捕獲結構、電能調理模塊以及相關連接件和密封件構成。其中,電磁感應能量捕獲結構的定子與磁流變減振器的缸筒連接在一起,在定子凹槽內纏繞著電磁線圈,永磁體構成收集電能的動子。實際工作時,在外界環境振動作用下,減振器的活塞桿在缸筒內做上下往復運動。由于電磁感應能量捕獲結構的永磁體動子通過中間連接桿和減振器的活塞連接在一起,因此在振動力作用下,永磁體將隨著減振器活塞桿一起運動,在定子腔內做往復運動。由法拉第電磁感應定律可知,這將引起定子上纏繞的電磁線圈內部的磁通量發生變化,產生感應電動勢。電能調理模塊將產生的感應電動勢轉換成適合磁流變減振器使用的穩壓直流電,作用到磁流變減振器的活塞線圈上,產生控制磁流變液的磁場。同時施加到活塞線圈上的電能與外界振動強弱成正比關系,從而可以在外界振動較強時輸出較大的阻尼力,增強振動控制能力,實現對振動的自適應控制。
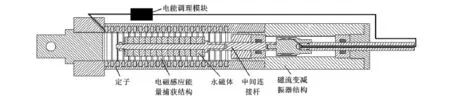
圖1 新型磁流變減振器結構簡圖
在結構設計過程中,采取了一系列措施來提高永磁體磁場利用率和電能收集效率,以便能夠捕獲足夠的供磁流變減振器使用的電能,具體措施有:①連接固定永磁體的連接桿使用不導磁的材料鋁制成,這樣可以迫使磁力線向四周發散通過定子形成閉合回路,避免磁力線通過連接桿形成閉合回路,減少磁力線的泄漏;②鋁桿上相鄰永磁體的磁極化方向相反,同時永磁體之間設置一個由高磁導率材料制成的磁極,從而在其同極結合處,兩組磁力線因同極相斥而被密集壓縮并正交垂直地穿過空氣隙,這就可以大大地減小磁力線實際穿過的空氣隙厚度,從而增強發電磁場強度,提高產生感應電動勢的值;③電磁感應能量捕獲結構的定子內部采用T形齒結構,可以有效地增大磁力線與定子的接觸面積,從而使更多的磁力線穿過空氣隙和定子形成閉合回路,增加發電量,提高發電效率。
1.2 電能收集理論建模
在振動環境作用下,電磁感應能量捕獲結構的永磁體動子在減振器活塞桿帶動下在定子內做往復運動,繞制在定子上的電磁線圈切割磁感應線產生電能,將一部分振動能轉換成電能。其內部結構如圖2所示,主要包括定子、永磁體、磁極、電磁線圈等。定子內部采用T形齒結構,并且在相鄰T形齒的凹槽內繞制有電磁線圈,這樣可以最大化地穿過磁力線,從而提高永磁體磁場的利用率,增加收集的電能。鋁桿將圓環形永磁體和磁極連接在一起構成電磁感應能量捕獲結構的動子,永磁體的磁極化方向為其軸向方向,并且相鄰永磁體的極化方向相反。實際實驗器件加工時,永磁體采用NdFeB35制成;定子和磁極用電磁純鐵DT4制成,因為DT4的磁導率高、磁阻低,永磁體產生的磁力線就容易穿過磁極、氣隙和定子,形成磁力線回路,提高發電效率。根據磁路原理設計加工的電磁感應能量捕獲結構的關鍵結構參數如表1所示,可見定子內部極靴的占空比為40%,永磁體在定子內往復運動時有1638匝電磁線圈參與切割磁感應線進行發電。
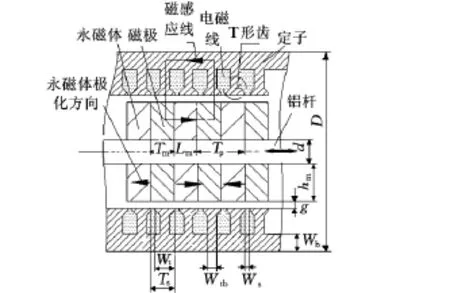
圖2 電磁感應能量捕獲內部結構
當永磁體在定子內往復運動時,針對其中一個電磁線圈,其等效磁路模型如圖3所示,其中,Frem為永磁體的剩余磁動勢;Rm為永磁體自身的磁阻;Rm′為鋁桿引起的磁漏;Rp為磁極的磁阻;Rg為氣隙的磁阻;Rc為定子的磁阻。實際加工時定子和磁極用高導磁材料電磁純鐵DT4制成,磁阻非常小,所以Rp和Rc可以忽略不計。同時因為材料鋁不導磁,所以鋁桿引起的磁漏非常小,Rm′也可以忽略不計。由法拉第電磁感應定律可知,產生的感應電動勢為線圈內磁通的變化率。所以在外界振動作用下,電磁感應能量捕獲結構產生的電動勢為
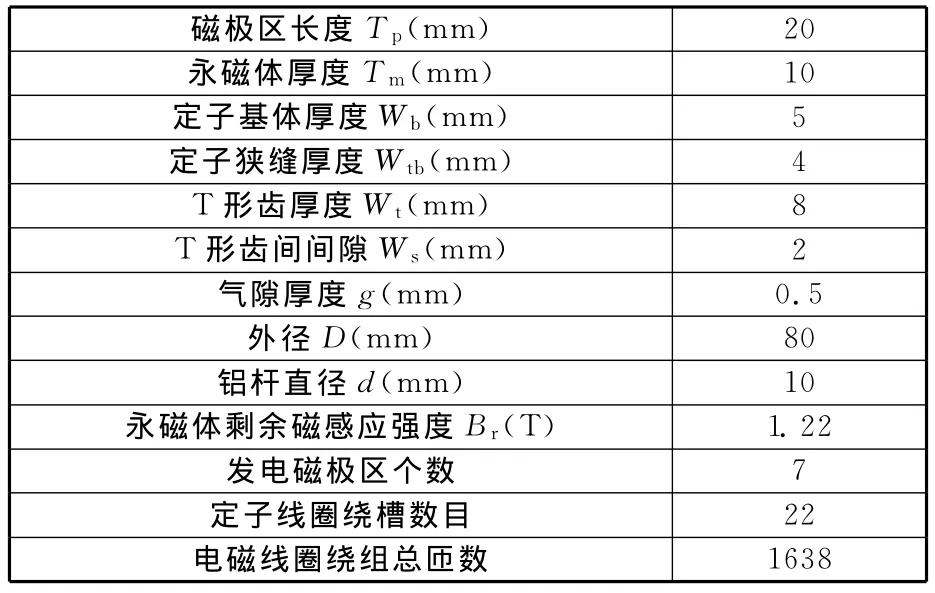
表1 能量捕獲結構關鍵參數

式中,ψPM為永磁體的磁鏈;z為外界振動引起的永磁體動子與定子間的相對位移;t為運動時間;N 為電磁線圈的匝數;Φg為定子和永磁體之間氣隙的磁通量。

圖3 等效磁路模型
同時由磁路原理[11]可知,定子和永磁體之間的氣隙磁通量可用下式計算:

式中,μ0為真空磁導率;Brem為永磁體的剩余磁通密度;Hc為永磁體的磁矯頑力;Ag為氣隙的截面積;Am為圓環形永磁體的截面積。
化簡式(1)和式(2)可得這個線圈切割磁感應線產生的感應電動勢為

1.3 電能調理電路
由式(4)可知,定子內電磁線圈產生的電動勢不是一個定值,其大小與振動強弱成正比,方向隨著振動方向的變化不斷變化。圖4為永磁體在外界振動力作用下,沿著其軸線在定子內部做振幅為10mm、頻率f分別為1.59Hz和4.77Hz的正弦運動時收集的感應電動勢與時間的關系圖。由圖4可知,在外界振動作用下,電磁感應能量捕獲結構收集的電動勢是大小和方向不斷變化的交流電壓,而磁流變減振器工作時需要向活塞線圈中輸入固定直流電流來產生控制磁流變液的電磁場,所以收集的感應電動勢不能直接被磁流變減振器使用。因此,需要一個電能調理模塊將電磁感應能量捕獲結構產生的交流電轉換成適合磁流變減振器使用的穩壓直流電。

圖4 感應電動勢與時間關系
為了將電磁感應能量捕獲結構收集的交流電轉換成適合磁流變減振器使用的直流電,依照電磁感應能量捕獲結構的相關結構參數而設計的調理電路如圖5所示。該調理電路由一個直流整流電路和一個存儲電容C1組成,直流整流電路用來將方向不斷變化的感應電動勢轉換成方向不變的直流電壓,存儲電容用來存儲從直流整流電路輸出的電能,并通過電容充放電功能將其轉換成適合磁流變阻尼器使用的穩壓直流電。為了驗證調理電路的有效性,在電路仿真軟件PSPICE中對設計的調理電路進行仿真研究,如圖5所示,其中,電壓輸入V1與時間的關系如圖4所示。圖5中,R1表示繞制在定子內電磁線圈的電阻值(28.26Ω);R2表示磁流變阻尼器活塞線圈的電阻值(1.26Ω)。在交流電壓源V1的激勵下,經過電能調理電路,R2兩端的電壓與時間關系如圖6所示。
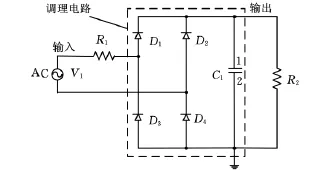
圖5 電磁感應能量捕獲調理電路
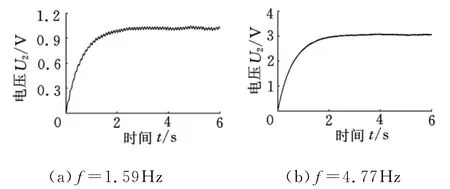
圖6 調理電路輸出電壓與時間關系
圖6a所示為f=1.59Hz振動條件下,經過電能調理電路之后施加到R2兩端的電壓U2(即施加到磁流變減振器兩端的電壓)與時間的關系曲線,電壓經過約3s的上升時間后,從第3s開始在固定值1.0V上下波動,并且波動的幅度較小,約為0.025V,這種波動是由存儲電容C1的充放電引起的。圖6b所示為f=4.77Hz振動條件下,R2兩端的電壓U2與時間的關系曲線,同樣,電壓在3s內從0上升到固定值3V,并在3V上下波動,此時電壓波動幅度比f=1.59Hz振動作用時小得多,基本上穩定在3V。由于電壓波動比較小,可以忽略不計,因此在振幅為10mm、頻率f分別為1.59Hz和4.77Hz的振動作用下產生的感應電動勢經過電能調理電路轉換之后,可以分別在磁流變減振器活塞線圈中產生0.7A和2.3A左右的直流電。由此可以說明:本文設計的電能調理電路可以將電磁感應能量捕獲結構收集的交流電壓轉換成適合磁流變阻尼器使用的穩壓直流電壓。
圖7所示為振幅為10mm,不同振動頻率下,經電能調理電路之后R2兩端的電壓U2與時間的關系關系。由圖7可見,在相同振幅下,振動頻率越大,R2兩端的電壓越大,施加到磁流變減振器兩端的電流越大,減振器輸出阻尼力越大。由此可以說明:本文設計的新型磁流變減振器可以根據外界振動強弱實時地調整輸出阻尼力,實現對振動的自適應智能控制。
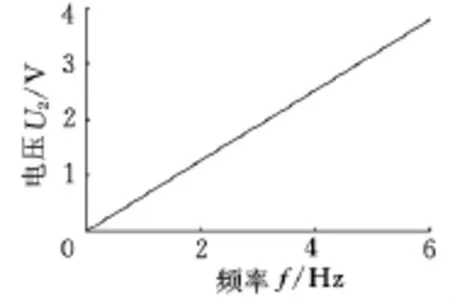
圖7 不同振動頻率下R2兩端的電壓
2 自適應磁流變懸架系統
針對汽車懸架振動控制,利用本文設計的新型磁流變減振器可以構建無需外部電源和控制設備的汽車自適應磁流變懸架半主動控制系統,如圖8所示。

圖8 自適應磁流變半主動懸架1/4模型
根據圖8所示的模型,可以建立以下動力學方程:

式中,Fm、Ce分別為磁流變減振器的可調庫侖阻尼力和黏性阻尼系數;ks、ku分別為懸架彈簧剛度和輪胎剛度;ms、mu分別為簧載質量和非簧載質量;xr、xu、xs分別為路面位移、非簧載質量位移和簧載質量位移。
針對設計的新型磁流變減振器結構特點,根據磁流變減振器阻尼力相關公式[12],其庫侖阻尼力和黏性阻尼系數分別可用下式計算:

式中,Dc、dc分別為磁流變減振器活塞和活塞桿直徑;L為磁流變減振器的有效通道長度;η為磁流變液的零場黏度;h為阻尼通道間隙厚度;v為磁流變減振器活塞桿的運動速度;τy為磁流變液的剪切屈服應力。
由式(6)可知,磁流變減振器的庫侖阻尼力Fm與磁流變液的剪切屈服應力τy成正比,所以通過控制輸入到減振器活塞線圈上的電流可以實時地控制磁流變液的剪切屈服應力τy,從而控制減振器輸出不同的阻尼力,實現對汽車懸架的智能控制。由上文分析可知(圖7),外界振動越強,電磁感應能量捕獲結構收集的電能越多,施加到磁流變減振器活塞線圈上的電壓越大,輸出的阻尼力也就越大,所以本文設計的自適應磁流變減振器可以根據外界振動的強弱來“自行”控制輸出阻尼力的大小,在無需外界控制設備的條件下實現對汽車懸架的智能控制。因此,本文構建的自適應磁流變懸架系統的控制策略是:依靠新型磁流變減振器自身對外界振動強弱的“感知”能力自行調節輸出振動控制力,當汽車懸架振動較強時,減振器輸出較大的阻尼力以消耗更多的振動能,提高汽車操作穩定性;而當振動較弱時,減振器輸出較小的阻尼力以提供更好的乘坐舒適性,并且無需外界電源設備,從而實現對汽車懸架系統的自適應控制。
3 實驗
為了驗證汽車自適應磁流變懸架半主動控制系統對振動的控制效果,在博仕樂液壓機械有限公司加工了新型磁流變減振器試件,并且在加工過程中將減振器和汽車彈簧集成在一起,以便能夠更快捷有效地搭建懸架半主動控制系統。首先測試設計加工的新型磁流變減振器的自身阻尼特性,測試過程中將電磁感應能量捕獲結構和磁流變減振器斷開,向減振器線圈中施加大小不同的固定電流,其阻尼力曲線如圖9所示。由圖9可見,隨著外界輸入電流從0逐漸增大到1.6A,磁流變減振器輸出阻尼力峰值也由200N逐漸增大到1600N左右,這表明所設計的磁流變減振器可以達到預先設定的振動控制目標,可以通過控制輸入電流來控制其對外輸出不同的阻尼力。

圖9 不同電流激勵下的阻尼力
同時測試振幅為10mm,不同振動頻率的正弦激勵下電磁感應能量捕獲結構收集的電能,并與理論仿真結果進行對比,以驗證新型磁流變減振器的電能捕獲能力,對比結果如圖10所示。由圖10可見,隨著振動頻率的增大,電磁感應能量捕獲結構收集的電壓也逐漸增大,這表明外界振動越強,收集的電能越多,施加到磁流變減振器上的電流也就越大,從而輸出更大的阻尼力來控制振動,即減振器輸出阻尼力受外界振動強弱的控制。同時對比圖10中實驗所得曲線和仿真曲線可見,在相同振動條件下,實驗測得的曲線在仿真曲線之下,實際所獲電能比理論值略小,其能量捕獲效率約為58%。經分析,這是由于仿真過程中忽略了實際工作時永磁體向外界環境磁場泄漏,同時繞制在定子凹槽里面的線圈繞組的電阻值也比理論值稍大,以及測量誤差等原因,并不影響理論設計計算的正確性。
在實驗驗證了磁流變減振器自身特性以及電磁感應能量捕獲結構正確可行的情況下,在PA-20-Z型電液伺服汽車懸架實驗系統(長春科新實驗儀器有限公司生產)上對構建的自適應磁流變1/4懸架系統進行了實驗研究,測試振動作用下懸架系統的振動響應,驗證搭建的汽車自適應磁流變懸架對振動的控制能力。實際搭建的實驗系統如圖11所示,自適應磁流變減振器和彈簧集成在一起,減振器上端連接模擬汽車簧載質量的質量塊,下端連接在模擬汽車非簧載質量的質量塊上,非簧載質量塊通過底端彈簧連接在實驗臺架激振頭上,底端彈簧用來模擬汽車輪胎。實驗時,工控機控制臺架激振頭產生振動,并通過模擬輪胎的底端彈簧帶動非簧載質量塊、磁流變減振器集成和簧載質量塊沿著導軌上下往復運動,模擬汽車實際行駛時懸架的振動,并通過測量簧載質量的加速度來衡量懸架系統的振動響應。為了保證實驗數據采集和處理的準確性,加速度傳感器選用德國Kistler公司的8932型單向壓阻式加速度傳感器,數據采集硬件選用美國國家儀器(NI)有限公司的PXI-4472B振動采集系統。
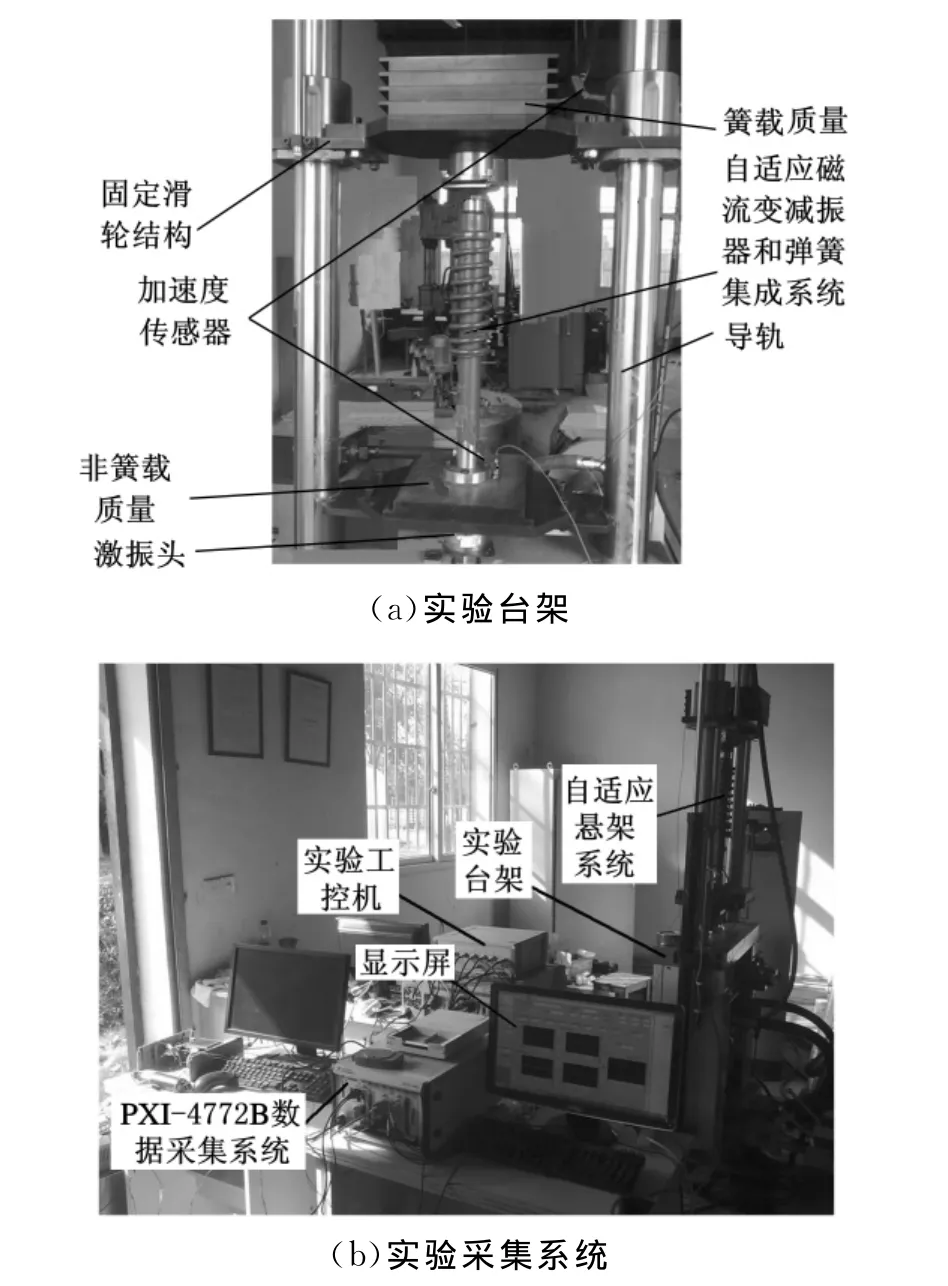
圖11 實驗系統
實驗時測量兩種情況下的懸架響應:第一種是OFF狀態,即電磁感應能量捕獲結構與磁流變減振器不連接,在此條件下沒有電流輸入到磁流變減振器活塞中,磁流變減振器相當于一個常規液壓減振器,靠自身的黏性阻尼力控制懸架振動,此時懸架系統相當于目前汽車上通常配備的被動液壓懸架系統;第二種是ON狀態,此時電磁感應能量捕獲結構與磁流變減振器連接,其收集的電能施加到磁流變減振器上,產生控制磁流變液的電磁場,控制磁流變減振器輸出不同的阻尼力。同時因為收集的電能與外界振動強弱成正比關系,懸架系統能夠根據外界振動激勵的強弱實時地改變輸出阻尼力,實現對汽車懸架的自適應振動控制。
實驗過程中,實驗系統工控機中輸入路譜振動數據,控制激振頭產生相當于汽車以72km/h的車速行駛在路譜D級路面上時懸架所受的振動激勵,利用PXI-4472B數據采集系統分別采集上述兩種條件下的簧載質量加速度,并進行加速度時域和頻域分析,處理后的實驗數據結果如圖12、圖13所示。由圖12、圖13可知,在路譜波振動作用下,與被動懸架系統相比,自適應磁流變半懸架半主動控制系統有效地減小了汽車懸架簧載質量的垂直振動加速度,使懸架簧載質量的垂直振動降低了30%左右,改善了汽車行駛的平順性及乘坐的舒適性,并具有良好的魯棒性。實驗結果表明,自適應磁流變懸架系統可以很好地控制車輛懸架振動,說明利用本文設計的新型磁流變減振器構建的自適應磁流變半主動懸架是可行的。
4 結論
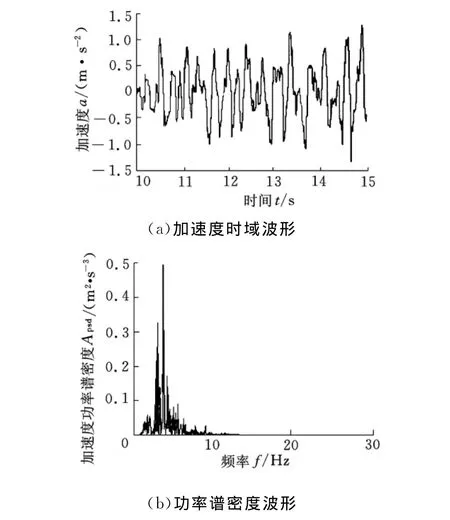
圖12 被動懸架響應實驗結果

圖13 自適應磁流變半主動懸架響應實驗結果
本文設計了一種新型磁流變減振器,可以在無需外部電源和控制設備的情況下實現對振動的自適應控制。建立了其電能收集的理論模型和電能調整電路,進行了仿真分析,結果表明,在不同的振動條件下,新型磁流變減振器可以根據外界振動強弱程度輸出不同阻尼力,實現了對振動的自適應控制。利用新型磁流變減振器構建了無需外部電源和控制設備的汽車自適應磁流變半主動懸架,并進行了實驗研究,實驗結果表明:與常規被動液壓懸架相比,自適應磁流變半主動懸架明顯地抑制了汽車垂直振動,改善了汽車行駛的平順性,說明利用所設計的新型磁流變減振器對汽車懸架進行自適應控制是可行的。
[1]Boada M,Calvo J A,Boada B L,et al.Modeling of a Magnetorheological Damper by Recursive Lazy Learning[J].Int.J.Non-Linear Mech.,2011,46(3):479-485.
[2]Sevki C,Tahsin E.Modeling and Testing of a Field-controllable Magnetorheological Fluid Damper[J].International Journal of Mechanical Sciences,2010,5(3):1036-1046.
[3]Peter J N,Neild S A,Wagg D J.Quasi-active Suspension Design Using Magnetorheological Dampers[J].Journal of Sound and Vibration,2011,330(10):2201-2219.
[4]Cho S W,Jo J S,Jang J E,et al.A Smart Passive Damping System for Stay Cables[C]//Smart Structures and Materials 2006:Sensors and Smart Structures Technologies for Civil,Mechanical and Aerospace Systems.San Diego,USA:SPIE,2006:1-6.
[5]Ahmadian M,Pare C.A Quarter-car Experimental Analysis of Alterative Semiactive Control Methods[J].Journal of Intelligent Material Systems and Structures,2000,11(3):604-612.
[6]Gordaninejad F,Kelso S P.Fail-safe Magnetorheological Fluid Dampers for Off-highway,High-payload Vehicles[J].Journal of Intelligent Material Systems and Structures,2000,11(5):395-406.
[7]Potter J N,Neild S A,Wagg D J.Quasi-active Suspension Design Using Magnetorheological Dampers[J].Journal of Sound and Vibraion,2011,330(4):2201-2219.
[8]李銳,陳偉民,余妙,等.汽車磁流變懸架垂直振動控制與試驗研究[J].中國機械工程,2008,19(17):2132-2138.
[9]鄒得和.德爾福的新一代MagneRide磁流變阻尼可調減振器[J].汽車與配件,2008,20(9):34-35.
[10]陸正剛,郭慧明.柔性車輛振動和運行平穩性控制研究[J].中國機械工程,2006,17(10):1026-1031.
[11]Bois H D.The Magnetic Circuit in Theory and Practice[M].London:Longmans,1896.
[12]周云,譚平.磁流變阻尼控制理論與技術[M].北京:科學出版社,2007.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
奧秘(創新大賽)(2020年1期)2020-05-22 02:42:38
小學科學(學生版)(2019年10期)2019-11-16 08:55:02
小哥白尼(趣味科學)(2019年12期)2019-06-15 10:56:32
通信電源技術(2018年3期)2018-06-26 06:34:18
人大建設(2018年2期)2018-04-18 12:17:00
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40