月面巡視探測器外場試驗(yàn)方法
2012-12-21 08:42:06申振榮
航天器環(huán)境工程 2012年6期
關(guān)鍵詞:規(guī)劃
賈 陽,王 瓊,王 芳,顧 征,申振榮
(北京空間飛行器總體設(shè)計部,北京100094)
0 引言
月面巡視探測器是一種能夠在月球表面移動,完成探測、采樣、運(yùn)輸?shù)热蝿?wù)的航天器。國外從20世紀(jì)60年代開始研制巡視探測器,其中美國和蘇聯(lián)在月球及行星巡視探測器的研究方面處于世界領(lǐng)先地位。在20世紀(jì)70年代,蘇聯(lián)在探月過程中成功地使用了“月球車1 號”和“月球車2 號”巡視探測器。在火星表面探測中,成功應(yīng)用的巡視探測器包括美國的“索杰納”號、“機(jī)遇”號和“勇氣”號[1]。
在巡視探測器的研制過程中,需要進(jìn)行大量的地面試驗(yàn),其中包括巡視探測器系統(tǒng)的驗(yàn)證試驗(yàn)。針對巡視探測器系統(tǒng)的外場試驗(yàn)一般在野外自然條件下,尋找類似目標(biāo)天體地形地貌的試驗(yàn)場區(qū)進(jìn)行,綜合驗(yàn)證巡視探測器的性能、地面操作控制程序,同時對操作人員進(jìn)行訓(xùn)練。
1 巡視探測器外場試驗(yàn)簡況
1.1 國外情況簡述
在“Apollo”工程實(shí)施中,NASA 建立了室外的月球地貌試驗(yàn)場,用于訓(xùn)練航天員并對月球車進(jìn)行測試。試驗(yàn)場為散布石塊的沙地。
為驗(yàn)證巡視探測器的導(dǎo)航、移動、避障、遙操 作等多方面的性能,美國和俄羅斯于1993年聯(lián)合研制了“Marsokhod”火星巡視探測器地面樣機(jī),開展了多項地面試驗(yàn),主要包括:1993年在俄羅斯堪察加半島開展了遙操作控制性能的測試試驗(yàn),1994年在美國莫哈維沙漠試驗(yàn)驗(yàn)證了大延時情況下的團(tuán)隊配合能力,1995年在美國Kilauea 火山場地試驗(yàn)驗(yàn)證了導(dǎo)航控制能力,1996年在美國亞利桑那州Painted 沙漠集中驗(yàn)證了敏感器、控制模式選擇、自主控制能力、取樣能力和遙操作下的科學(xué)探測能力,1999年在美國莫哈維沙漠試驗(yàn)驗(yàn)證了科學(xué)探測策略制定方法。
智利北部的阿塔卡馬沙漠是世界上最干旱的沙漠之一,其多石的地貌結(jié)合疏松的沙土構(gòu)成了酷似月球、火星的地貌環(huán)境。“Nomad”是一種四輪驅(qū)動、無人駕駛的巡視探測器,1997年在阿塔卡馬沙漠進(jìn)行了為期45 d 的地面試驗(yàn),共行駛220 km,創(chuàng)造了自動巡視探測器的穿越距離紀(jì)錄。試驗(yàn)內(nèi)容包括天線指向設(shè)置、地形地貌觀測和路徑規(guī)劃等。
作為2003年發(fā)射的“MER”火星探測巡視任務(wù)的原型機(jī),“FIDO”于1999—2002年期間進(jìn)行了多次地面試驗(yàn),驗(yàn)證將用于“MER”的導(dǎo)航、移動、遙操作等多項技術(shù)。毗鄰Soda 山脈的銀湖盆地被選作試驗(yàn)場地,它在更新紀(jì)冰川時期曾是一個湖泊,現(xiàn)今成了一個干涸的湖床,其表面由大大小小的黏土礦碎粒組成,與美國火星巡視任務(wù)的預(yù)選著陸點(diǎn)類似。試驗(yàn)共持續(xù)了12 d,執(zhí)行了多路徑點(diǎn)的穿越、探測目標(biāo)選擇、樣品采集并送回起始點(diǎn)等多項任務(wù)[2],以測試FIDO 的各個設(shè)備。
位于華盛頓大學(xué)的FIDO 科學(xué)服務(wù)中心負(fù)責(zé)實(shí)時地將各設(shè)備在試驗(yàn)中獲取的數(shù)據(jù)傳送給試驗(yàn)隊。而核心操作團(tuán)隊(Core Operations Team,COT)工作在試驗(yàn)現(xiàn)場,包括數(shù)位規(guī)劃工程師和科學(xué)家。
整個試驗(yàn)的路徑和任務(wù)規(guī)劃是基于衛(wèi)星圖像、模擬降落相機(jī)圖像以及導(dǎo)航和全景相機(jī)圖像進(jìn)行的。科學(xué)目標(biāo)的選擇主要依據(jù)全景相機(jī)和紅外點(diǎn)分光計的數(shù)據(jù),對每一個科學(xué)目標(biāo)(如巖石),先由顯微成像儀、穆斯堡爾分光計進(jìn)行成像分析,然后由巖芯取樣器鉆取巖芯后返回。
2004年,美國制定了“新太空計劃”,預(yù)計于2015年重返月球建立基地。為配合該計劃的實(shí)施,NASA 研制了一系列的月面工作設(shè)備,并開展了大量地面驗(yàn)證試驗(yàn)。
Desert RATS(Desert Research And Technology Studies,沙漠調(diào)查和技術(shù)研究)是NASA 開展的一系列試驗(yàn),用于驗(yàn)證未來月球和火星探測所使用的技術(shù)及儀器設(shè)備。較近的一次試驗(yàn)于2007年9月在亞利桑那州沙漠的Cinder Lake 附近開展。此次試驗(yàn)持續(xù)2 周,測試了包括月球前哨站、用于航天員和設(shè)備在月面運(yùn)輸?shù)拇笮腿匦我苿悠脚_(All-Terrain Hex-Legged Extra-Terrestrial Explorer,ATHLETE)、“Centaur” 半人型機(jī)器人(上半部與人相似,下半部是機(jī)器車)、裝有電子牽引的挖掘機(jī)、新研制的航天服和“SCOUT”(Science, Crew, Operations and Utility Testbed)巡視車在內(nèi)的新設(shè)備。
1.2 國內(nèi)情況簡述
中國空間技術(shù)研究院為了考核巡視探測器原理樣機(jī)在野外自然環(huán)境下移動和環(huán)境感知的能力,于2006年7月進(jìn)行了原理樣機(jī)外場試驗(yàn)。試驗(yàn)場位于寧夏、甘肅交界的騰格里沙漠邊緣,并利用沙漠的沙土模擬了月表的地形地貌特征[3]。外場試驗(yàn)重點(diǎn)驗(yàn)證了整車的移動、導(dǎo)航定位、運(yùn)動控制、依據(jù)視覺的路徑規(guī)劃、特定條件下局部自主避障、遙操作、科學(xué)探測等功能。試驗(yàn)中利用外場附近的通信線路,遙端通過ADSL 寬帶建立了測控鏈路,實(shí)現(xiàn)了北京、湖北對野外試驗(yàn)場上原理樣機(jī)的遙操作控制[4]。
2 外場試驗(yàn)的目的和內(nèi)容
外場試驗(yàn)的目的是:檢驗(yàn)巡視探測器在未知、復(fù)雜、多變的環(huán)境下,按照工作程序完成既定任務(wù)的能力;按照既定的工作程序,訓(xùn)練和檢驗(yàn)地面操作人員相互配合、正確操作的能力;演練巡視探測器的任務(wù)過程,檢驗(yàn)和完善其工作程序。
巡視探測器外場試驗(yàn)的內(nèi)容包括以下幾個方面:
1)任務(wù)規(guī)劃試驗(yàn)
巡視探測器與任務(wù)支持子系統(tǒng)在模擬著陸點(diǎn)成像(即根據(jù)衛(wèi)星圖像、降落相機(jī)圖像和巡視探測器相機(jī)圖像)的支持下進(jìn)行其初始狀態(tài)分析和信息融合,生成覆蓋試驗(yàn)場的地圖產(chǎn)品,在此基礎(chǔ)上結(jié)合星歷、光照、通信、巡視探測器狀態(tài)(包括著陸點(diǎn)位置、能源狀況、溫度水平)及科學(xué)探測目標(biāo)點(diǎn)(即任務(wù)規(guī)劃終點(diǎn))進(jìn)行任務(wù)規(guī)劃,并將處理結(jié)果輸出;地面人員根據(jù)對試驗(yàn)環(huán)境的掌握情況對生成的任務(wù)行為序列進(jìn)行綜合評價,驗(yàn)證任務(wù)規(guī)劃處理能力。
2)過夜停靠點(diǎn)試驗(yàn)
過夜停靠點(diǎn)試驗(yàn)演練巡視探測器月夜休眠前尋找過夜停靠點(diǎn)的過程。對巡視探測器在100 m×100 m范圍內(nèi)找到合適停靠點(diǎn)的可能性和用時長短進(jìn)行摸底,并完善其工作程序安排。
測試前需消除巡視探測器的初始姿態(tài)誤差。巡視探測器從某一指定起始點(diǎn)開始進(jìn)行周圍地形感知,選擇可能停靠點(diǎn)的位置,并根據(jù)指導(dǎo)移動到該位置;在移動過程中進(jìn)行動態(tài)姿態(tài)測量,將測量結(jié)果反饋給地面操作人員;地面操作人員根據(jù)遙測信息判斷該停靠點(diǎn)是否滿足要求。試驗(yàn)中,過夜停靠點(diǎn)的要求為:巡視探測器前端方向朝南,其本體俯仰角在0°~15°之間,側(cè)傾角在-1°~1°之間。
如不滿足要求,則再次通過環(huán)境感知判斷可能的停靠點(diǎn),巡視探測器移動過去并進(jìn)行靜態(tài)姿態(tài)測量,確定停靠位置是否滿足要求。如不滿足,須進(jìn)一步調(diào)整,直至滿足要求,同時記錄找到一次合適停靠點(diǎn)所用的時間和行駛的里程。
3)短距離移動探測試驗(yàn)
巡視探測器短距離移動探測試驗(yàn)是在100 m×100 m 范圍內(nèi),按照在軌運(yùn)行的真實(shí)情況進(jìn)行移動、導(dǎo)航和探測,地面進(jìn)行全程的任務(wù)支持。地面人員對試驗(yàn)過程中任務(wù)和路徑規(guī)劃的合理性、巡視探測器導(dǎo)航控制的效果,以及執(zhí)行指令的正確性、科學(xué)探測的效果、系統(tǒng)的處理速度、工作流程安排的合理性、團(tuán)隊配合的默契程度等進(jìn)行評價,驗(yàn)證巡視探測器和任務(wù)支持子系統(tǒng)的綜合能力。
4)任務(wù)過程綜合演練
在所有單項測試項目完成后,外場試驗(yàn)將進(jìn)入任務(wù)過程綜合演練階段,巡視探測器進(jìn)行長距離、大范圍(1 km2以上)的移動探測,在過程中演練移動、感知、探測、充電、月晝轉(zhuǎn)月夜等工作模式。除了驗(yàn)證巡視探測器的綜合性能外,該試驗(yàn)還可以訓(xùn)練和檢驗(yàn)地面人員的操作技能和團(tuán)隊配合能力,完善地面任務(wù)支持的工作流程,提高器地配合能力。
3 外場試驗(yàn)系統(tǒng)組成
外場試驗(yàn)系統(tǒng)主要由巡視探測器、試驗(yàn)場子系統(tǒng)、試驗(yàn)監(jiān)控子系統(tǒng)、試驗(yàn)輔助子系統(tǒng)、試驗(yàn)總控子系統(tǒng)、任務(wù)支持子系統(tǒng)和試驗(yàn)保障子系統(tǒng)組成,如圖1所示。
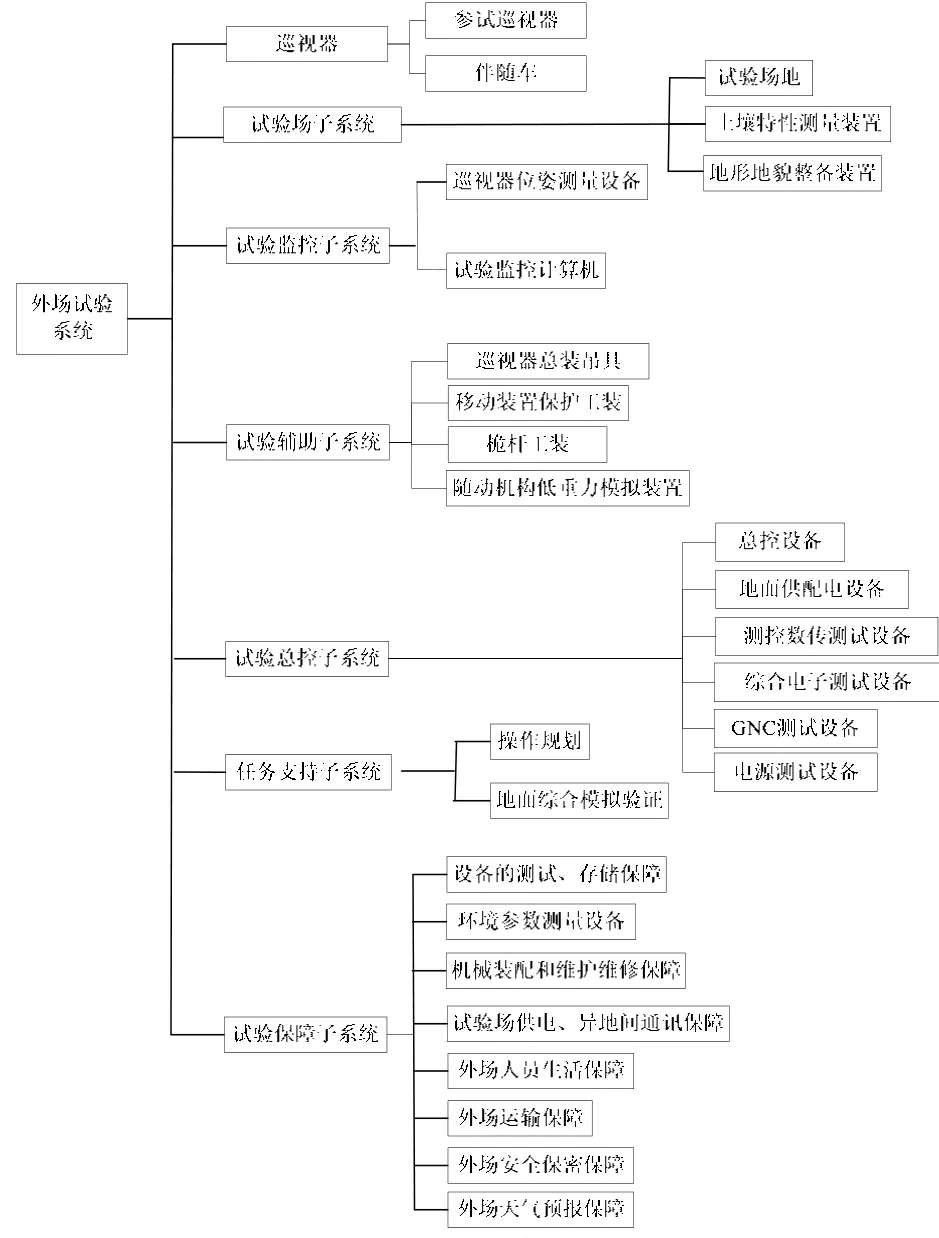
圖1 外場試驗(yàn)系統(tǒng)組成Fig.1 Block diagram of the field test system
4 外場選址
根據(jù)月面地形地貌特點(diǎn)和外場試驗(yàn)的主要內(nèi)容,確定外場選址的要求如下:
1)試驗(yàn)場面積不小于3 km×3 km;
2)試驗(yàn)區(qū)場景單調(diào),無明顯植被覆蓋,無較大的對比度差異;
3)試驗(yàn)場應(yīng)為野外開闊地,表層土壤干燥,具有一定的石塊、風(fēng)化的碎石和塵土,地形地貌與月表地形地貌分布盡量接近;
4)試驗(yàn)區(qū)域周圍含有人工試驗(yàn)場布置所需的各種規(guī)格的沙和礫石;
5)試驗(yàn)區(qū)域氣候條件干燥,年平均降水量低于10 mm;
6)每月風(fēng)力低于4 級的天數(shù)不少于20;
7)試驗(yàn)區(qū)域邊緣距離國家二級公路的直線距離不超過10 km;
8)緊急醫(yī)療需要時,試驗(yàn)現(xiàn)場至當(dāng)?shù)囟夅t(yī)院用時不超過2 h;
9)試驗(yàn)場地具備合法使用的條件;
10)試驗(yàn)場位于氣象雷達(dá)的覆蓋區(qū)域內(nèi),能夠進(jìn)行及時準(zhǔn)確的瞬時天氣預(yù)報;
11)能夠保證海事衛(wèi)星電話信號的穩(wěn)定暢通;
12)試驗(yàn)場內(nèi)不存在具備攻擊性的野生動物;
13)試驗(yàn)場附近人口密度低,便于試驗(yàn)保密。
在對地形地貌、氣候等多方面資料分析的基礎(chǔ)上[5],組織選址考察隊對多個可能地區(qū)進(jìn)行了現(xiàn)場勘察,包括甘肅省武威市民勤縣巴丹吉林沙漠和騰格里沙漠沿線、敦煌庫姆塔格沙漠沿線、哈密西部五堡鄉(xiāng)等。根據(jù)與技術(shù)要求的符合情況,確定選擇敦煌西北207 km 的庫姆塔格沙漠邊緣作為試驗(yàn)場(位于羅布泊地區(qū)的東部,雅丹地貌西側(cè))。
5 試驗(yàn)工況及結(jié)果
巡視探測器外場試驗(yàn)包括任務(wù)規(guī)劃試驗(yàn)、過夜停靠點(diǎn)試驗(yàn)、短距離移動探測試驗(yàn)、任務(wù)過程綜合演練共4 類12 個工況。
1)任務(wù)規(guī)劃試驗(yàn)
任務(wù)規(guī)劃試驗(yàn)根據(jù)環(huán)境特征是否豐富,選擇了2 個著陸點(diǎn)位置來設(shè)計2 種試驗(yàn)工況(A1 和A2),其中A1 為環(huán)境特征明顯工況,A2 為環(huán)境特征不明顯工況。
按照大綱和細(xì)則的要求,任務(wù)規(guī)劃試驗(yàn)需要有試驗(yàn)場的衛(wèi)星圖像和模擬降落相機(jī)圖像作為試驗(yàn)的輸入數(shù)據(jù)。試驗(yàn)中利用了美國Geoeye 衛(wèi)星影像數(shù)據(jù),影像覆蓋范圍為2 km×2 km,分辨率為1.5 m(將分辨率為0.5 m 的原圖像進(jìn)行了降分辨率處理而得)。模擬月面著陸過程降落相機(jī)所拍攝的圖像,采用無人直升機(jī)進(jìn)行了航拍,獲得了著陸過程高度由1 200 m 至距地面4m 過程中的圖像序列。
全景相機(jī)在云臺俯仰角為0°、-12°、-24°、-36°時,均旋轉(zhuǎn)360°等間距地拍攝了28 對圖像,共拍攝圖像112 對。導(dǎo)航相機(jī)在云臺俯仰角為-20°和-40°時,均旋轉(zhuǎn)360°拍攝了18 對圖像,共拍攝圖像36 對。
綜合上述圖像信息,根據(jù)巡視探測器的設(shè)計約束,考慮能源、熱控、通信的限制,按照月球星歷模型計算確定了巡視探測器11 d 的工作程序安排,其輸出的行駛路線在DEM 上的顯示如圖2所示。
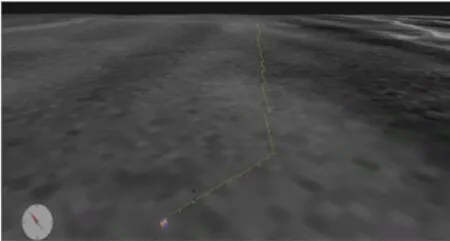
圖2 A1 工況任務(wù)規(guī)劃結(jié)果Fig.2 Mission planning result of case A1
2)過夜停靠點(diǎn)試驗(yàn)
以其中B1 工況為例進(jìn)行介紹。在該工況中,巡視探測器起始姿態(tài)為俯仰-1.205°、滾動-1.167°、偏航-167.483°,均不滿足過夜停靠的要求。巡視探測器先進(jìn)行環(huán)境感知,共拍攝7 對導(dǎo)航相機(jī)圖像(云臺俯仰-30°,偏航-60°~60°,間隔20°)。任務(wù)支持子系統(tǒng)根據(jù)導(dǎo)航相機(jī)圖像進(jìn)行了全局路徑規(guī)劃,生成的控制策略如下:
① 按曲率0.666 7 右轉(zhuǎn)前進(jìn)0.9 m;
② 按直線前進(jìn)3.34 m;
③ 按曲率-0.16 左轉(zhuǎn)前進(jìn)1.55 m;
④ 原地左轉(zhuǎn)彎32°;
⑤ 前進(jìn)直行1.5 m。
按照控制策略完成的巡視探測器移動仿真路線圖如圖3所示。
由總控子系統(tǒng)根據(jù)生成的控制策略制作指令塊,并注入巡視探測器。
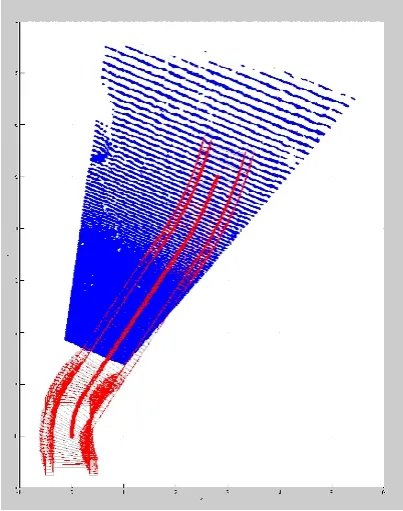
圖3 B1 工況巡視探測器移動仿真路線Fig.3 Lunar rover route obtained by simulation of case B1
巡視探測器按照指令進(jìn)行移動,在執(zhí)行到最后一項指令并行駛至1 m 左右時,若姿態(tài)遙測滿足休眠條件,停止移動后仍然滿足條件,則B1 工況成功完成。
巡視探測器最終的姿態(tài)為:俯仰0.65°,滾動0.62°,偏航-177.36°。尋找月夜休眠點(diǎn)共行駛了約7.1 m;尋找過夜停靠點(diǎn)總耗時約53 min,其中導(dǎo)航相機(jī)成像時間9 min,任務(wù)支持子系統(tǒng)規(guī)劃時間30 min,總控子系統(tǒng)生成指令塊時間10 min,移動并找到過夜停靠點(diǎn)的時間約4 min。
3)短距離移動探測試驗(yàn)
短距離移動探測試驗(yàn)分為兩類,其中C1~C3有衛(wèi)星圖像和降落相機(jī)圖像支持,需要任務(wù)規(guī)劃,并按照任務(wù)規(guī)劃的結(jié)果進(jìn)行探測;C4~C6 無衛(wèi)星圖像和降落相機(jī)圖像支持,由試驗(yàn)指揮在全景相機(jī)或?qū)Ш较鄼C(jī)圖像上指定科學(xué)探測目標(biāo)點(diǎn)。
C2 工況中,巡視探測器的起始位置為(28.421 m, 29.756 m),科學(xué)探測目標(biāo)點(diǎn)的位置為(43.36 m, 44.28 m)。巡視探測器首先進(jìn)行環(huán)境感知,導(dǎo)航相機(jī)共成像14 對。任務(wù)支持子系統(tǒng)根據(jù)導(dǎo)航相機(jī)圖像進(jìn)行了三維重建和全局路徑規(guī)劃,生成的控制策略如下:
① 按曲率-0.011 7 左轉(zhuǎn)前進(jìn)10 m;
② 按曲率-0.011 7 左轉(zhuǎn)前進(jìn)9.9 m。
在全景相機(jī)成像完畢后,進(jìn)行了紅外成像光譜儀探測,獲得了目標(biāo)區(qū)域的紅外光譜數(shù)據(jù)和100 幅可見光圖像;隨后進(jìn)行了避障相機(jī)支持下的機(jī)械臂的展開和收攏;完成了環(huán)境感知、路徑規(guī)劃、移動和科學(xué)探測后,C2 工況結(jié)束。
4)任務(wù)過程綜合演練
在任務(wù)過程綜合演練(D1 工況)中,巡視探測器開展了5 個科學(xué)探測點(diǎn)的探測和長距離雷達(dá)探測,并進(jìn)行了充電、出入測控弧段、太陽高度角大于33°時的輔助熱控、尋找過夜停靠點(diǎn)等多個模式的演練。
D1 工況首先進(jìn)行的是巡視探測器充電模式的演練。任務(wù)支持子系統(tǒng)根據(jù)巡視探測器的姿態(tài)和器上時間,得出太陽翼最優(yōu)角為127.55°,對應(yīng)的太陽高度角為86.40°;巡視探測器按照指令控制太陽翼的運(yùn)動。接著在第四次導(dǎo)航規(guī)劃移動完成后,進(jìn)行了第一次出入測控弧段演練,任務(wù)支持子系統(tǒng)根據(jù)巡視探測器的姿態(tài)和器上時間,生成第一次出測控弧段前巡視探測器的控制策略。
巡視探測器按照指令移動到科學(xué)探測點(diǎn)后,開始科學(xué)探測。首先進(jìn)行全景相機(jī)成像,云臺俯仰0°和-12°時分別360°旋轉(zhuǎn)成像28 對,共成像56 對。接著進(jìn)行了紅外成像光譜儀探測,獲得了目標(biāo)區(qū)域的紅外光譜數(shù)據(jù)和100 幅可見光圖像。隨后進(jìn)行了避障相機(jī)支持下的機(jī)械臂的展開和收攏。在第四個科學(xué)目標(biāo)點(diǎn)探測完成后,進(jìn)行了長距離測月雷達(dá)探測,共發(fā)射了1 411 道雷達(dá)脈沖并獲得相應(yīng)的探測數(shù)據(jù)。
在第五個科學(xué)目標(biāo)點(diǎn)探測完成后,進(jìn)行尋找月夜休眠點(diǎn)測試:實(shí)測巡視探測器姿態(tài)為滾動0.8°、俯仰-1.78°、偏航-127°,其中滾動滿足要求,而俯仰和偏航均不滿足。按照地面規(guī)劃結(jié)果控制巡視探測器移動,到達(dá)過夜停靠點(diǎn)時,巡視探測器動態(tài)定姿結(jié)果為滾動0.79°、俯仰0.88°、偏航-178.8°,靜態(tài)定姿結(jié)果為滾動0.79、俯仰0.91°、偏航-178.9°,均符合要求,共行駛了4.1 m。尋找過夜停靠點(diǎn)總耗時約45 min。
在整個外場試驗(yàn)過程中,巡視探測器行駛里程約1 410 m,進(jìn)行了25 次導(dǎo)航規(guī)劃,開展了11 個目標(biāo)的科學(xué)探測,雷達(dá)探測距離880 m,全景相機(jī)、導(dǎo)航相機(jī)、避障相機(jī)、紅外光譜儀共拍攝了近3 200幅圖像,達(dá)到了預(yù)期的目標(biāo)。
6 結(jié)束語
通過對國外行星表面巡視探測器試驗(yàn)情況的調(diào)研以及我國月球巡視探測器所開展的外場試驗(yàn),可以得出以下結(jié)論:
1)從工程的角度,巡視器的外場試驗(yàn)主要側(cè)重對巡視器移動和導(dǎo)航控制性能的驗(yàn)證。
2)試驗(yàn)條件建立過程中需要考慮試驗(yàn)場地形、溫度、氣候、光照、通信帶寬、通信窗口、數(shù)據(jù)量等方面的限制,盡可能模擬任務(wù)的真實(shí)條件。
3)在外場試驗(yàn)中還包括對地面操作控制系統(tǒng)的考核和操作人員的訓(xùn)練。對巡視器的操作控制盡可能模擬真實(shí)任務(wù)狀態(tài)。試驗(yàn)開始前,操作控制人員不能對試驗(yàn)場有先驗(yàn)知識;試驗(yàn)開始后,利用巡視器獲得的感知信息,進(jìn)行路徑規(guī)劃,指導(dǎo)巡視器探測。
4)外場試驗(yàn)條件模擬對試驗(yàn)場選址提出了較高要求,除了模擬地形要求之外,還需要考慮其他因素(如通信、交通、醫(yī)療等)。
5)由于受通信窗口、時延的限制,優(yōu)化巡視探測器的工作流程和提高團(tuán)隊配合的默契程度對于高效地完成探測任務(wù)非常重要。
根據(jù)外場選址的要求,將敦煌西北庫姆塔格沙漠地區(qū)選定為試驗(yàn)場并進(jìn)行了月面巡視探測器的試驗(yàn),進(jìn)行了任務(wù)規(guī)劃試驗(yàn)、過夜停靠點(diǎn)試驗(yàn)、短距離移動探測試驗(yàn)、任務(wù)過程綜合演練共4 類試驗(yàn),開展了任務(wù)規(guī)劃、環(huán)境感知成像、路徑規(guī)劃、巡視探測器操作控制、絕對定位、相對定位、載荷探測、機(jī)械臂規(guī)劃等方面的驗(yàn)證工作,優(yōu)化了工作程序,鍛煉了操作控制隊伍,為巡視探測器的研制及在軌高效安全運(yùn)行奠定了基礎(chǔ)。
(References)
[1]褚桂柏, 張熇.月球探測器技術(shù)[M].北京:中國科學(xué)技術(shù)出版社, 2007
[2]賈陽, 陳建新, 申振榮, 等.月面巡視探測器[J].航空制造技術(shù), 2007(12):44-47 Jia Yang, Chen Jianxin, Shen Zhenrong, et al.Lunar rover[J].Aeronautical Manufacturing Technology, 2007 (12):44-47
[3]賈陽, 陳建新, 張熇, 等.月面巡視探測器關(guān)鍵技術(shù)分析[J].航天器工程, 2006,15(2):54-58 Jia Yang, Chen Jianxin, Zhang He, et al.Key technology analysis of lunar rover[J].航天器工程, 2006, 15(2):54-58
[4]賈陽, 陳百超, 楊璐, 等.巡視探測器懸架機(jī)構(gòu)綜述[J].航天器工程, 2008, 17(2):83-89 Jia Yang, Chen Baichao, Yang Lu, et al.An overview of the planet rover suspension system[J].Spacecraft Engineering, 2008, 17(2):83-89
[5]吳正.中國沙漠及其治理[M].北京:科學(xué)出版社, 2009
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:34
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
