一種控制多彈協同攻擊時間和攻擊角度的方法
2012-12-25 08:46:52王曉芳
彈道學報 2012年2期
王曉芳,洪 鑫,林 海
(北京理工大學 宇航學院,北京100081)
隨著科學技術的高速發展,導彈防御系統的能力不斷增強,單枚導彈作戰在很多情況下已無法滿足戰場的要求,多枚導彈協同作戰變得越來越重要.為了提高導彈協同作戰的殺傷力,通常對攻擊角度有要求,而為了實現飽和攻擊,又對攻擊時間有要求.文獻[1~3]分別基于最優控制理論和比例導引律設計了控制導彈攻擊角度的制導律;文獻[4,5]對具有攻擊時間約束的制導律進行了研究;文獻[6]基于最優控制理論提出了一種可同時控制多枚導彈攻擊方位角和攻擊時間的二維制導律;文獻[7,8]中提出了同時具有攻擊角度和攻擊時間約束的三維制導律,但兩種制導律都需要預先設定理想攻擊時間,而理想攻擊時間的合理設定一直是一個難點.
本文提出一種對多枚導彈的攻擊角度和攻擊時間進行控制的基于虛擬球體的方法.選其中一枚導彈作為領彈,以目標為球心、領彈與目標之間的距離為半徑構造虛擬球體,針對剩余的每枚導彈(稱作從彈)設計對應在虛擬球體表面的虛擬點:虛擬點和目標連線的方向為此從彈的理想攻擊角方向.領彈采用比例導引律,虛擬球體隨著領彈的飛行逐漸縮小至目標點,設計最優控制器控制從彈逼近和跟蹤虛擬點,從而實現多枚導彈從不同的角度同時命中目標.為了減小從彈對虛擬點逼近和跟蹤時的需用過載,基于以上思路,對虛擬點軌跡進行了改進設計.
1 攻擊角度和攻擊時間控制模型
多枚導彈協同攻擊目標時,選擇其中一枚為領彈.在以目標為球心、領彈距目標的距離為半徑的虛擬球體上,根據某從彈的理想攻擊角確定它此時對應的虛擬點,如圖1所示.圖1中,Axyz為地面坐標系,Ml(xl,yl,zl)、Mfi(xfi,yfi,zfi)、Mvi(xvi,yvi,zvi)和T(xt,yt,zt)分別為領彈、第i枚從彈和它對應的虛擬點、目標及它們在地面坐標系中的位置.rl為領彈與目標之間的距離.εyi和εzi為第i枚從彈在俯仰方向和偏航方向的理想攻擊角.Mvixviyvizvi為虛擬點坐標系,它的原點為虛擬點Mvi,Mvixvi軸與虛擬點和目標的連線重合,指向目標為正;Mviyvi軸位于包含Mvixvi軸的鉛垂面內垂直于Mvixvi軸,指向上為正;Mvizvi軸與其它兩軸構成右手直角坐標系.
圖1 領彈、從彈與虛擬點的相對位置圖
在對協同作戰的導彈進行攻擊角度和攻擊時間控制的研究中,假設從彈的控制系統是閉環穩定的,即可以實現對從彈速度指令vfc,彈道傾角指令θfc以及彈道偏角指令ψVfc的穩定跟隨控制.設這3個通道可以簡化為參考文獻[9]中所示的一階系統,為了節省篇幅,這里不再列出.本文中vf、θf和ψVf亦指從彈的速度、彈道傾角和彈道偏角.
本文中控制方法的設計思路:首先,以目標為球心,領彈相對于目標的距離為半徑構造一虛擬球體,然后根據某從彈的理想攻擊角確定其在虛擬球體上的一個虛擬點,最后設計最優控制器控制從彈逼近并跟蹤此虛擬點.當領彈按照比例導引律攻擊目標時,所構造的虛擬球體將隨領彈與目標的距離變短而逐漸縮小,虛擬球體上的虛擬點從理想攻擊角方向以直線逼近目標,控制器控制從彈跟蹤虛擬點運動,最后以理想攻擊角和領彈同時到達目標.根據圖1可知,在已知目標位置的基礎上,虛擬點在地面坐標系中的位置可表示為(省去下標i)
本文中的理想攻擊角εy、εz為常數,那么,對式(1)求導可得到:
式中,目標位置、εy、εz已知,由于領彈運動狀態已知,因此l也可計算得到,則在導彈飛行過程中,根據式(2)可得到每一時刻的v、v和v.
表征從彈運動的方程組為
從彈與其對應的虛擬點在地面坐標系中的位置差為
將從彈與虛擬點在地面坐標系中的位置差轉換到虛擬點坐標系中有:
式中,L(εy)、L(εz)為初等旋轉矩陣,其值可見文獻[10].將式(4)代入式(5)展開、化簡并求導可得:
為了簡化式(7)的表達形式,可令:
由于εy、εz、v、v和v均為已知,因此Ai、Bi、Ci(i=1,2,3,4)為已知.式(7)變為
在控制攻擊角度和攻擊時間的控制器中,控制變量為從彈的運動參數vf、θf和ψVf.從式(8)可知,此時的系統為非線性控制系統,可通過變量代換的方法使其可采用線性系統的方法進行求解.令u1=vfcosθfcosψVf,u2=vfsinθf,u3=vfcosθfsinψVf,則式(8)變為
將式(9)寫成狀態方程,形式為

式中,狀態變量X=(x′dy′dz′d)T,控制變量U=(u1u2u3)T,擾動量W=(A1B1C1)T,系統矩陣A為零矩陣,控制矩陣B為
對系統進行控制的目的是使從彈與虛擬點重合并跟蹤虛擬點,也就是使X為0.在求得控制變量U后,通過變換得到從彈的運動參數指令vfc、θfc和ψVfc,變換公式為
運動參數指令經過從彈的一階穩定控制系統,得到從彈的真實飛行參數vf、θf和ψVf.
2 虛擬點軌跡的改進
理想的虛擬點軌跡是一條直線,直接控制從彈逼近這條直線,對從彈的需用過載提出較高的要求.如對虛擬點軌跡進行改進,使它的前段變為曲線,逐步過渡交匯到原來設計的直線上,然后控制從彈逼近這條“曲線+直線”的軌跡,則會顯著降低對從彈需用過載的要求.假設當前從彈距目標的距離為rf,從彈與目標之間的視線角為εyf和εzf.把虛擬點和從彈到目標的距離之差Δr=rl-rf、理想攻擊角和實際視線角之差Δεy=εy-εyf、Δεz=εz-εzf分為N份,設計虛擬點分N步逐漸靠近理想虛擬點,N步以后和理想虛擬點重合.這時,虛擬點在地面坐標系的位置由式(1)變為
式中,整數n=1,2,…N.領彈的攻擊時間t*可根據文獻[7]中的算法預估得到,假設仿真步長為h,則N可根據以下式子取值:

式中,系數k≤1.k越大,實際虛擬點軌跡交匯到理想虛擬點軌跡上的時間越晚,對降低導彈的需用過載要求越有利.
3 最優控制器的設計
對式(10)所示的模型進行變換,令W′=B-1W,則式(10)可變為

令U1=U+W′,則有:=AX+BU1.
采用最優控制原理對式(14)所示問題進行求解.由于控制的目的是使狀態X為0,因此可把其看作一個狀態調節器問題.控制器的性能指標采用如下所示的線性二次性能指標:

式中,P、Q為對稱半正定陣,R為對稱正定陣,為了計算的方便,它們通常取對角常數陣.XF為終點時的狀態,本問題中它為0.這時,線性二次性能指標變為

系統的初始條件為開始時從彈與虛擬點的位置差,可由式(4)計算得到.根據最優控制理論可得到最優控制量的解為U1=-R-1BTKX.式中,K為最優控制黎卡提方程的解.再作變換得到式(10)所示系統的控制變量為U=U1-W′.得到U之后根據式(11)便得到從彈的運動參數指令.
4 仿真分析
假設領彈和3枚從彈協同攻擊一個直線運動艦艇.目標的初始位置為(6000m,0,3 000m),速度為18m/s,航向角為45°.4枚導彈均由平飛狀態轉入末制導,因此,初始彈道傾角均設為0,考慮導彈在偏航方向受到中制導的作用,設轉入末制導時導彈的彈道偏角與視線角相差不大,4枚導彈的初始參數如表1所示.從彈控制系統中速度、彈道傾角、彈道偏角3個控制通道的時間常數分別為3s、1s、1s.控制器的權系數矩陣為Q=diag(1,1,1),R=diag(0.5,0.5,0.5).考慮到導彈的能量限制,對從彈的飛行狀態進行限幅,即|vf-vf0|≤60 m/s,|θf-θf0|≤15°,|ψVf-ψVf0|≤30°,其中帶下標“0”的量表示初始值.
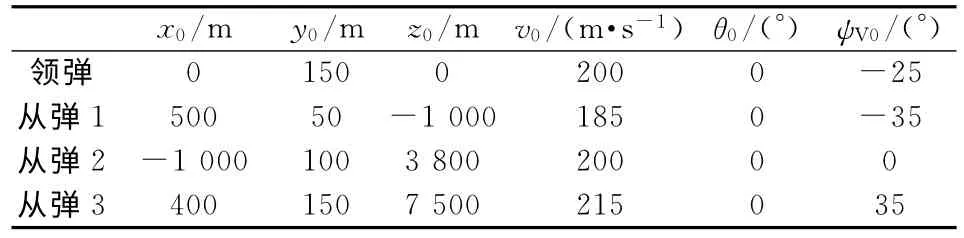
表1 導彈的初始參數
領彈在俯仰方向和偏航方向均采用比例系數為3的比例導引律,從彈采用所設計的最優控制器,仿真結果如圖2~圖5所示.3枚從彈的理想攻擊角和實際攻擊角以及攻擊時間如表2所示,t*為攻擊時間,εys、εzs為導彈(包括領彈和從彈)的實際攻擊角,對于從彈來講,εys=εyf,εzs=εzf.
圖2 導彈三維彈道圖
圖3 從彈速度變化圖
圖4 從彈彈道傾角變化圖
圖5 從彈彈道偏角變化圖
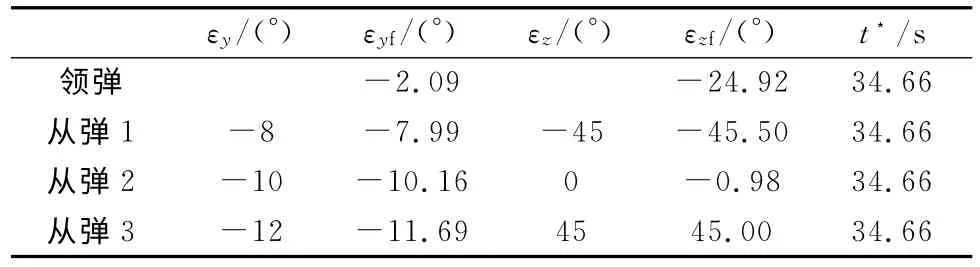
表2 導彈的攻擊角度和攻擊時間
對仿真結果進行分析可知:
①在飛行時間為34.66s時,領彈與3枚從彈距目標的距離均小于2m,可認為4枚導彈同時命中了目標.4枚導彈協同作戰的攻擊時間由領彈的飛行時間確定,并不需要提前指定,因此,本文中的方法在實際應用時比較方便.
②3枚從彈在俯仰方向和偏航方向的實際攻擊角與理想攻擊角相差不大,最大偏差不超過1°.本文中,領彈采用比例導引律飛行,并沒有對它的攻擊角度進行控制.但由于領彈在以比例導引律飛行,可以估算出它的攻擊角度,這個攻擊角度作為其它幾枚從彈理想攻擊角度設定的參考.通過設定不同的理想攻擊角來實現領彈和從彈從不同的方向命中目標,得到良好的作戰效果.在實際應用時,領彈也可以采用帶有落角約束的任何一種制導律來對它的攻擊角度進行控制,這并不影響本文所提方法的使用.本文的領彈之所以采用比例導引律,是出于對導彈命中精度和協同作戰時高低彈道綜合應用的考慮.
③由于從彈1、從彈2和從彈3的初始視線角和速度矢量方向與理想攻擊角偏差較大,因此,3個從彈控制器開始時輸出的速度、彈道傾角和彈道偏角比較大,均被限幅.從彈3的初始彈目距離與領彈的初始彈目距離之差、豎直方向的初始視線角與理想攻擊角之差比從彈1和從彈2大,因此,控制器輸出的速度和彈道傾角受到限幅的時間最長.而在偏航方向,從彈3的初始視線角與理想攻擊角之差最小,因此,從彈3控制器輸出的彈道偏角受限幅時間最短,最先達到穩態.圖3~圖5中的曲線是控制指令經過從彈一階慣性控制系統后的從彈實際運動狀態隨時間變化的曲線,上述結論可從圖3~圖5中看出.由以上分析可知,從彈的初始狀態對控制器的輸出有較大的影響.
④通過調節控制器的權系數矩陣Q和R可以減小控制的穩態誤差,但同時會影響控制量及其變化率,因此需要合理設置控制器的權系數矩陣,使穩態誤差和控制量都在允許的范圍內.
采用如式(12)所示的方法對虛擬點軌跡進行改進設計,N按照式(13)取值,本算例中取k=1.以從彈2為例,理想虛擬點軌跡、實際虛擬點軌跡以及從彈2的彈道如圖6所示.改進前后的從彈2的法向過載隨時間的變化如圖7、圖8所示,圖中nyf和nzf分別為從彈2在鉛垂平面和水平面內的法向過載.
由圖中可見,改進后的虛擬點軌跡先是一段曲線,此曲線逐漸逼近理想虛擬點的直線軌跡,最后和理想虛擬點軌跡重合,從彈趨近并跟蹤改進后的虛擬點軌跡,最后實現了對攻擊角度和攻擊時間的控制.虛擬點軌跡改進后,導彈的需用過載也大大減小.
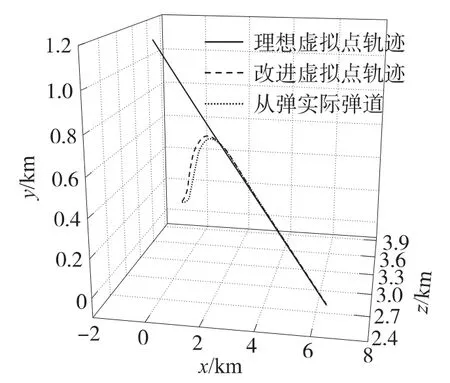
圖6 虛擬點軌跡及從彈2彈道圖
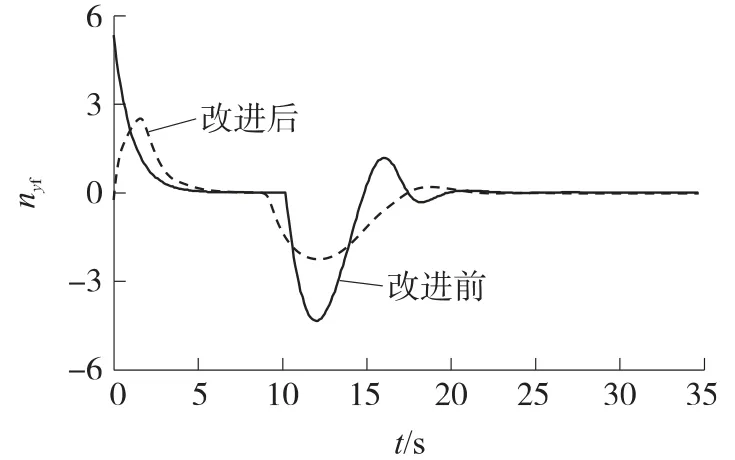
圖7 從彈2在鉛垂平面內的法向過載變化圖
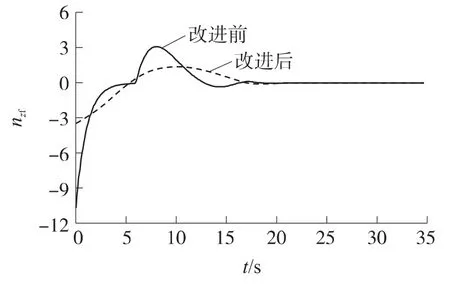
圖8 從彈2在水平面內的法向過載變化圖
5 結束語
針對多枚導彈協同攻擊目標的情況,本文提出了一種控制從彈跟蹤位于逐漸縮小的虛擬球體上的虛擬點,從而實現導彈攻擊時間和攻擊角度協同的方法.本方法具有無需事先指定理想攻擊時間、可攻擊的目標運動狀態不受限制、可實現三維空間攻擊的優點.另外,還可設計不同的算法對虛擬點軌跡進行改進來減小從彈的需用過載.總之,該方法在應用方面有很大靈活性,具有較廣闊的軍事應用前景.
[1]SONG T L,SHIN S J,CHO H.Impact angle control for planar engagements[J].IEEE Transactions on Aerospace and Electronic Systems,1999,35(4):1 439-1 444.
[2]RATNOO A,GHOSE D.Impact angle constrained interception of stationary targets[J].Journal of Guidance,Control,and Dynamics,2008,31(6):1 816-1 821.
[3]顧文錦,雷軍委,潘長鵬.帶落角限制的虛擬目標比例導引律設計[J].飛行力學,2006,24(2):43-46.GU Wen-jin,LEI Jun-wei,PAN Chang-peng.Design of the climbing trajectory using virtual target’s proportional navigation method with the control of terminal azimuth of a missile[J].Flight Dynamics,2006,24(2):43-46.(in Chinese)
[4]JEON I S,LEE J I,TAHK M J.Homing guidance law for cooperative attack of multiple missiles[J].Journal of Guidance,Control,and Dynamics,2010,33(1):275-280.
[5]趙世鈺,周銳.基于協調變量的多導彈協同制導[J].航空學報,2008,29(6):1 605-1 611.ZHAO Shi-yu,ZHOU Rui.Multi-missile cooperative guidance using coordination variable[J].Acta Aeronautica et Astronautica Sinica,2008,29(6):1 605-1 611.(in Chinese)
[6]LEE J I,JEON I S,TAHK M J.Guidance law to control impact time and angle[J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(1):301-310.
[7]JUNG B,KIM Y.Guidance law for anti-ship missiles using impact angle and impact time[C].AIAA Guidance,Navigation,and Control Conference and Exhibit.USA:AIAA,2006:1-13.
[8]張友安,馬培蓓.帶有攻擊角度和攻擊時間控制的三維制導[J].航空學報,2008,29(4):1 020-1 026.ZHANG You-an,MA Pei-bei.Three-dimensional guidance law with impact angle and impact time constraints[J].Acta Aeronautica et Astronautica Sinica,2008,29(4):1 020-1 026.(in Chinese)
[9]韋常柱,郭繼峰,崔乃剛.導彈協同作戰編隊隊形最優保持控制器設計[J].宇航學報,2010,31(4):1 043-1 050.WEI Chang-zhu,GUO Ji-feng,CUI Nai-gang.Research on the missile formation keeping optical control for cooperative engagement[J].Journal of Astronautics,2010,31 (4):1 043 -1 050.(in Chinese)
[10]錢杏芳,林瑞雄,趙亞男.導彈飛行力學[M].北京:北京理工大學出版社,2003.QIAN Xing-fang,LIN Rui-xiong,ZHAO Ya-nan.Missile flight dynamics[M].Beijing:Beijing Institute of Technology Press,2003.