臨近空間飛行器滑模控制中的指令參數化方法
2012-12-25 08:47:50劉魯華
彈道學報 2012年4期
王 鵬,劉魯華,吳 杰
(國防科學技術大學 航天與材料工程學院,長沙410073)
臨近空間飛行器飛行空域、速度的跨度和變化都非常大,體現出快時變、強耦合、強非線性和強不確定的特點,因此對這類對象的控制,傳統增益預置的線性控制方法難以達到滿意的控制效果,且還會帶來分段過多、控制器頻繁切換的問題,而非線性控制方法則提供了更好的解決方案[1~7].
非線性動態逆控制又稱為反饋線性化方法,是上世紀90年代,SNELL、ENNS和GARRARD等人針對飛機在做大迎角超機動飛行時的本體非線性、強耦合特征而提出來的非線性控制策略[1],其基本思想是:對于具體的研究對象,用系統模型生成一種可用反饋方法實現的原系統的“α階積分逆系統”,將對象補償為具有線性傳遞關系的偽線性系統.滑模變結構控制的結構在動態過程中根據系統當前的狀態(如偏差及其各階導數等)有目的地不斷變化,迫使系統按照預定“滑動模態”的狀態軌跡運動[8],因此滑模變結構控制對參數偏差和外界干擾具有較強的魯棒性.
本文將動態逆方法的線性化能力與滑模控制的強魯棒性有機結合,設計了臨近空間飛行器縱向滑模控制系統,并從提高信息利用率和增加控制系統設計自由度的角度出發,提出俯仰角變化率指令參數化計算方法,通過仿真計算分析了指令參數對控制效果的影響.
1 臨近空間飛行器縱向模型
臨近空間飛行器無動力平穩滑翔階段的側向運動參數變化較小,本文主要針對其縱向運動開展姿態控制問題研究.為了推導面向控制的縱向運動模型,提出如下假設:①視地球為均質圓球,并忽略地球旋轉;②飛行器為面對稱體,慣量積Jxz=Jyz=0,慣量積Jxy為小量,忽略不計;③側向運動參數z,β,σ,γV,ψ,γ,ωx,ωy均為小量.
基于上述假設,得到飛行器面向控制的標量形式縱向運動模型為

式中,v為飛行器速度;θ為速度傾角;ωz為俯仰角速度;x,y為飛行器在地面坐標系中的位置坐標;φ為俯仰角;地球引力常數μ=3.986×1014m3/s2;地心距,Re為球形引力場時的地球平均半徑;FD,FL分別為阻力和升力;Mz為俯仰力矩;m為飛行器質量;Jz為飛行器z軸轉動慣量.
攻角α與俯仰角、速度傾角之間滿足如下關系:

阻力、升力和俯仰力矩的表達式分別為

式中,動壓q=ρv2/2,ρ為空氣密度;Se為飛行器參考面積;l為飛行器參考長度;CD、CL為阻力系數和升力系數;mz為俯仰力矩系數.
氣動力系數和力矩系數是飛行馬赫數Ma、高度H、攻角α及俯仰舵偏角δφ的非線性函數,可表示為

2 模型的可逆性分析
狀態變量取為

輸入量取為俯仰舵偏角,即u=δφ,輸出量取為飛行器俯仰角,即Y=φ,則飛行器縱向運動模型可表述為

式中,

縱向動力學模型是一個SISO(單輸入單輸出)系統.為了分析飛行器運動模型的可逆性,給出MIMO(多輸入多輸出)非線性系統的可逆性定理——函數可控性定理.
定理1[9]一般 MIMO 非線性系統在(X0,u0)的鄰域內可逆的充分必要條件是在此鄰域內存在相對向量階,即(X0,u0)為Interactor算法的正則點.
SISO系統是MIMO系統的特殊情況,故式(6)所示的SISO系統在(X0,u0)的某個鄰域內可逆的充分必要條件是在此鄰域內存在相對階k.求解系統相對階的基本方法是Interactor算法[9].該算法的基本思想是:輸出的每個分量分別對時間求導數,直到導數中顯含輸入量為止,所求導數的次數即為該分量的相對階.
經過推導可得:

俯仰角二階導數對控制量u的偏導數為

對于臨近空間滑翔飛行器而言,ρ、v、Se、l均不為0,而mz為俯仰舵偏角δφ的函數,因此不始終為0,故不恒等于0,即俯仰角二階導數中已顯含控制量.
Interactor算法正常結束,相對階k=2,小于系統階數n=6,故飛行器縱向運動模型是可逆的.而推導中僅用到了繞質心的運動方程,相對階等于繞質心運動模型的系統階數,因此動態逆方法可實現繞質心運動模型的線性化.
3 基于指令參數化的縱向滑模控制器設計
飛行器縱向運動模型逆系統的輸入為俯仰角的二階導數,為了將滑模變結構控制與逆系統結合起來,在控制系統設計時滑模面應包含姿態角的一階導數,這樣,滑動函數僅需計算一次導數即可含有輸入量.為此可取滑動函數為[10]

式中,λ為正常數,跟蹤誤差e=φ-φc,φc為俯仰角指令.
為了能夠使S達到0,即能夠使系統軌跡在有限時間內到達滑動面,需為非線性系統選擇適當的控制律,滿足如下的滑動條件:

取Lyapunov函數為

則其對時間的微分為=,滑動條件已保證<0,故<0,即系統是穩定的.可見滑動條件與系統穩定性是等價的.
為了使式(10)成立,根據趨近律設計思想,可以選取如下的等速趨近律:

式中,ε為可選的嚴格正常數,sign(·)表示符號函數.
對式(9)微分得:

將式(12)代入上式得:

為了抑制抖振,將上式中的符號函數sign(S)用飽和函數sat(S,d)代替,飽和函數的定義為[10]

式中,d為可選的正常數.
于是控制律變為

縱向滑模控制系統結構如圖1所示.

圖1 縱向滑模控制系統結構圖
縱向控制系統的輸出為俯仰角,故最直接的控制方式是跟蹤俯仰角指令,而實際中控制指令一般以攻角形式給出.俯仰角和攻角可由歐拉角關系式(2)相互轉化,只需將攻角指令與當前時刻速度傾角相加即可得到俯仰角指令φc=αc+θ,故2種控制指令本質上是一致的.
式(16)所示的滑模控制律中用到俯仰角一階導數指令c和二階導數指令,其中一階導數指令對控制系統的指令跟蹤性能影響較大.按照常規控制系統設計方法,俯仰角一階導數指令由俯仰角指令對時間求導數直接得到,即

這種方法直觀、易理解,被廣泛采用.但若將c理解為俯仰角一階導數期望值,則最理想的狀況為

式中,φ為俯仰角實際值,Δt為仿真時間步長,經過一個控制步長,俯仰角就可以達到期望值φc.按照這樣的思路,式(17)所示常規計算方法的隱含前提是控制系統已將跟蹤誤差控制在較小范圍內,此時俯仰角指令與實際值相差不大,俯仰角一階導數期望值與俯仰角指令一階導數基本相同,因此常規方法比較適用于跟蹤誤差較小的情況.當跟蹤誤差較大時,常規方法的控制性能會明顯變差.另外從形式上看,常規計算方法只用到了俯仰角指令值,而未考慮俯仰角實際值,對信息的利用率不高.
本文從充分利用已有信息和增加控制系統設計自由度的角度出發,同時考慮到控制系統的延遲、超調等實際動態特性,對式(18)進行適當改造,提出參數化的俯仰角變化率(一階導數)指令計算方法,即

式中,Kω為俯仰角變化率指令參數.上式中所用數據包括φc、φ、Δt和Kω,其中前3個量是已知的或可測量的,在控制律式(16)中已用到了俯仰角及其指令值,在此又用其構造俯仰角一階導數指令,提高了已有信息的利用率;而俯仰角變化率指令參數Kω是引入的一個全新控制參數,增加了控制系統設計的自由度.該方法不僅適用于俯仰角實際值與指令值偏差不大的情況,對于偏差較大的情況也有較好的適應能力,通過調節指令參數,可有效提高控制系統的動態響應能力和穩態控制精度.
4 控制系統仿真分析
仿真初始條件如表1所示.

表1 仿真初始條件
俯仰角變化率指令參數Kω對控制系統動態響應影響較大,特別是在控制指令出現較大變化時影響尤為突出.由于初始誤差和指令突變的影響,在初始時刻和900s附近存在較大的跟蹤誤差,故這兩個時刻是特征控制點.Kω取不同值時,攻角跟蹤誤差如表2所示.表中,emax、ξ分別為特征控制點附近的攻角最大跟蹤誤差和超調量;eme1、eme2分別為控制全過程的攻角平均跟蹤誤差和平均絕對跟蹤誤差.

表2 不同指令參數條件下的跟蹤誤差
取λ=2,ε=0.2,d=0.05,仿真步長100ms,攻角指令及部分仿真結果如圖2~圖4所示.由表2和圖2可知:基于指令參數化的縱向滑模控制系統可以準確跟蹤攻角指令,在不同指令參數條件下,攻角最大跟蹤誤差為3°左右,平均跟蹤誤差eme1和平均絕對跟蹤誤差eme2均小于0.03°.
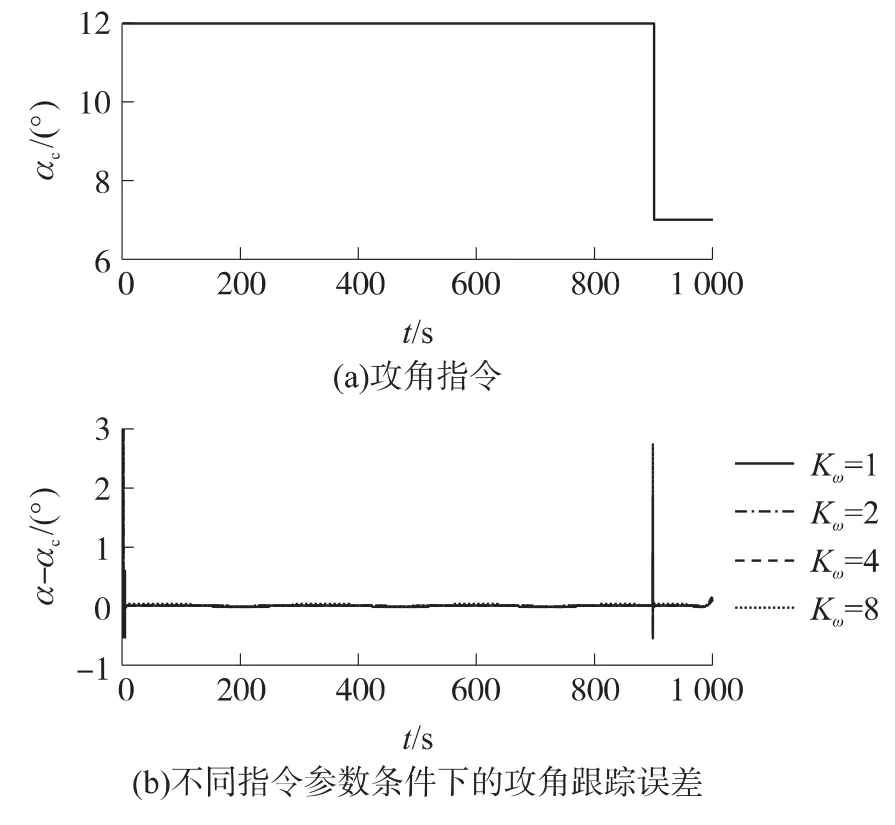
圖2 攻角指令及其跟蹤誤差
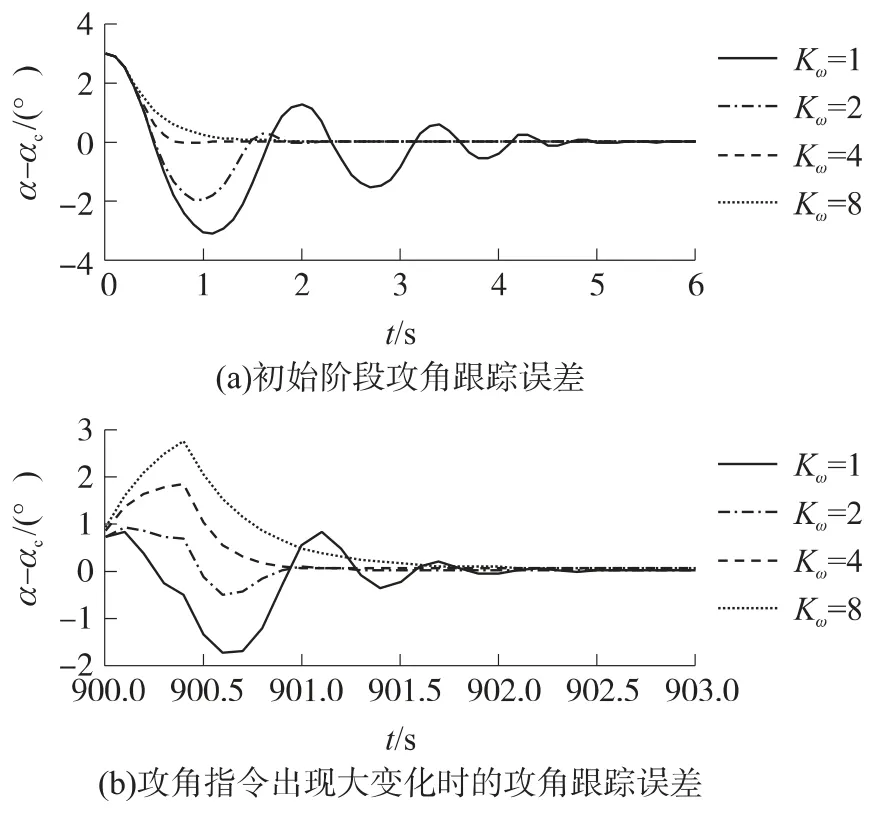
圖3 攻角跟蹤誤差局部放大圖
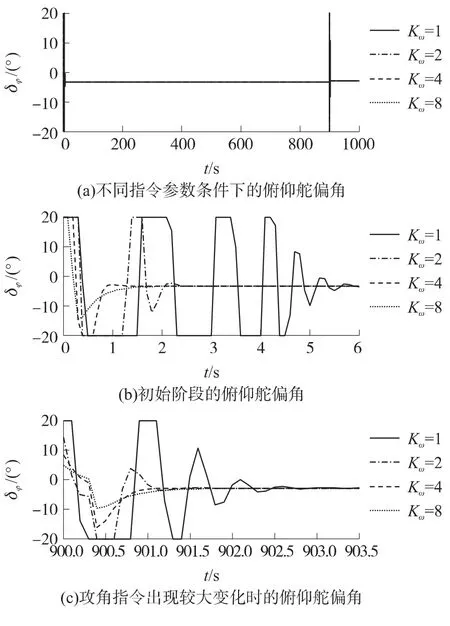
圖4 俯仰舵轉角及其局部放大圖
由表2、圖3、圖4可知,指令參數Kω對控制精度影響較大.當Kω較小時,特征控制點處的emax和ξ均較大,而eme1和eme2較小.由式(18)可知,俯仰角變化率指令與Kω值成反比,Kω較小時,俯仰角變化率指令較大,即控制系統動態響應能力強,相同跟蹤誤差條件下,控制輸入較大,故存在較大超調量.Kω值越小,圖3中所示超調量越大,圖4中俯仰舵偏角維持在最大值的時間越長,都說明了這一點.隨著Kω值的增大,emax先減小再增大;ξ不斷減小,即控制系統的動態響應能力不斷下降;eme1、eme2不斷增大,且二者相對差越來越小,即控制系統的穩態精度不斷變差.為了保證控制系統同時具有良好的動態響應能力和穩態精度,Kω值不應過大或過小,應根據實際需要進行折中處理.
5 結束語
臨近空間飛行器縱向運動模型是可逆的,且相對階數等于繞質心運動模型的系統階數,故動態逆方法可實現繞質心運動模型的線性化.
由內環動態逆控制器和外環滑模控制器所組成的飛行器縱向控制系統可以準確跟蹤攻角指令.指令參數Kω越小,控制系統動態響應能力越強,但會帶來超調量過大的問題;該參數值越大,控制系統穩態精度越差.因此,為了保證控制系統同時具有良好的動態響應能力和穩態精度,Kω值應進行折中處理.
[1]SNELL S A,ENNS D F,GARRARD L.Nonlinear inversion flight control for a super maneuverable aircraft[J].Journal of Guidance,Control,and Dynamics,1992,15(4):976-984.
[2]WANG Q,STENGEL R F.Robust nonlinear control of a hypersonic aircraft[J].Journal of Guidance,Control,and Dynamics,2000,23(4):577-585.
[3]劉燕斌,陸宇平.非線性動態逆控制在高超飛控系統中的應用[J].應用科學學報,2006,24(6):613-617.LIU Yan-bin,LU Yu-ping.Application of nonlinear dynamic inversion control in flight control of hypersonic vehicle[J].Journal of Application Sciences,2006,24(6):613-617.(in Chinese)
[4]LEE H P,REIMAN S E,DILLON C H.Robust nonlinear dynamic inversion control for a hypersonic cruise vehicle,AIAA 2007-6685[R].2007.
[5]KEUM W L,SUBRAMANIAN R,SAHJENDRA N S.Adaptive sliding mode 3-D trajectory control of F/A-18 model via SDU decomposition,AIAA 2008-6460[R].2008.
[6]LI H F,SUN W C,LI Z Y,et al.Index approach law based sliding control for a hypersonic aircraft,AIAA 2009-1734[R].2009.
[7]XU H J,MIRMIRANI M D,IOANNOU P A.Adaptive sliding mode control design for a hypersonic flight vehicle[J].Journal of Guidance,Control and Dynamics,2004,27(5):829-838.
[8]劉金琨,孫富春.滑模變結構控制理論及其算法研究與進展[J].控制理論與應用,2007,24(3):407-418.LIU Jin-kun,SUN Fu-chun.Research and development on theory and algorithms of sliding mode control[J].Control Theory& Applications,2007,24(3):407-418.(in Chinese)
[9]戴先中.多變量非線性系統的神經網絡逆控制方法[M].北京:科學出版社,2005.DAI Xian-zhong.Neural network inverse control method for multivariable nonlinear system[M].Beijing:Science Press,2005.(in Chinese)
[10]劉燕斌,陸宇平.基于變結構理論的高超音速飛機縱向逆飛行控制[J].信息與控制,2006,35(3):388-392.LIU Yan-bin,LU Yu-ping.Longitudinal inversion flight control based on variable structure theory for hypersonic vehicle[J].Information and Control,2006,35(3):388-392.(in Chinese)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
