考慮動態(tài)接觸參數(shù)的某型導(dǎo)彈發(fā)射動力學(xué)分析
2012-12-25 08:48:08劉馨心徐宏斌張亮亮褚福磊
彈道學(xué)報 2012年4期
劉馨心,徐宏斌,張亮亮,褚福磊
(1.清華大學(xué) 精密儀器與機械學(xué)系,北京100084;2.西安現(xiàn)代控制技術(shù)研究所,西安710065)
初始擾動是各類武器研制需要解決的一個重要問題.對導(dǎo)彈系統(tǒng)來說,過大的初始擾動會加重制導(dǎo)系統(tǒng)負擔(dān),甚至造成導(dǎo)彈失控.目前對初始擾動的研究主要考慮了推力偏心、質(zhì)量偏心、動不平衡[1]等因素,而考慮結(jié)構(gòu)間隙帶來的系統(tǒng)動特性影響的分析不多見.
由于設(shè)計需要或加工誤差等原因,導(dǎo)彈發(fā)射系統(tǒng)不可避免地存在運動副間隙,導(dǎo)彈在發(fā)射出筒過程中的動力學(xué)特性會受到間隙的影響,從而影響導(dǎo)彈的初始擾動.因此,在導(dǎo)彈發(fā)射系統(tǒng)建模過程中考慮運動副間隙影響,引入接觸碰撞模型,將有助于更加真實、準(zhǔn)確地研究系統(tǒng)參數(shù)對導(dǎo)彈初始擾動的影響,為導(dǎo)彈發(fā)射系統(tǒng)的設(shè)計以及提高發(fā)射精度提供參考.
研究系統(tǒng)間隙碰撞問題的關(guān)鍵是要解決接觸碰撞階段的動力學(xué)模型,而模型的難點在于接觸參數(shù)的確定[2~5].本文以某單位研制的反坦克導(dǎo)彈武器系統(tǒng)為研究對象,基于接觸變形碰撞模型,考慮接觸剛度、阻尼系數(shù)和穿透量的動態(tài)變化,利用動力學(xué)軟件建立了研究對象的動力學(xué)模型,通過數(shù)值仿真計算得到了系統(tǒng)的動力學(xué)響應(yīng).
1 接觸碰撞模型的建立
1.1 碰撞接觸力模型
經(jīng)典碰撞模型認為碰撞在瞬間完成,忽略了接觸過程,因此無法給出碰撞發(fā)生時的接觸力變化和碰撞時間等信息,但是系統(tǒng)的運動參數(shù)動態(tài)響應(yīng)是需要關(guān)注的重要特性,因此,采用等效的接觸變形碰撞模型來描述系統(tǒng)各部件之間的接觸較為合適.
DUBOWSKY[2]提出即使在較小的碰撞速度下,碰撞點鄰域內(nèi)仍會存在微小變形,并由彈簧阻尼系統(tǒng)來等效碰撞力的大小,其廣義形式可表示為

式中,F(xiàn)n為接觸點處法向接觸力,Kn為等效接觸剛度,C(δ)是與δ有關(guān)的阻尼因子,δ和為接觸點法向穿透深度及法向相對速度,非線性指數(shù)因子m≥1.不同的m、Kn和C(δ)代表不同的模型,常見的有基于Herts理論的接觸模型、基于DUBOWSKY線性化處理的碰撞模型以及非線性等效彈簧阻尼模型等,但這幾種模型里的接觸參數(shù)均是與系統(tǒng)運動特性無關(guān)的量.
HUNTER[3]分析了2個彈性球的碰撞運動過程,如圖1所示,質(zhì)量m2的小球以速度v0撞向質(zhì)量m1的小球,推導(dǎo)得撞擊過程中的最大撞擊力為

最大擠壓量為

式中,

式中,E、ν、R分別為小球的楊氏模量、泊松比和曲率半徑.
對于圓柱與圓筒碰撞,此時的α為

由式(2)、式(3)可看出,F(xiàn)m和δm均是與物體相對碰撞速度有關(guān)的量.文獻[4]通過對轉(zhuǎn)子和定子碰撞過程的線性化處理,并對比文獻[3]的計算結(jié)果,得到了兩剛體碰撞的線性當(dāng)量化接觸剛度計算公式.徐振欽等人[5]將這種碰撞模型引入到火箭武器發(fā)射過程中的彈管接觸碰撞多體系統(tǒng)動力學(xué)模型中,得到了較好的計算結(jié)果.
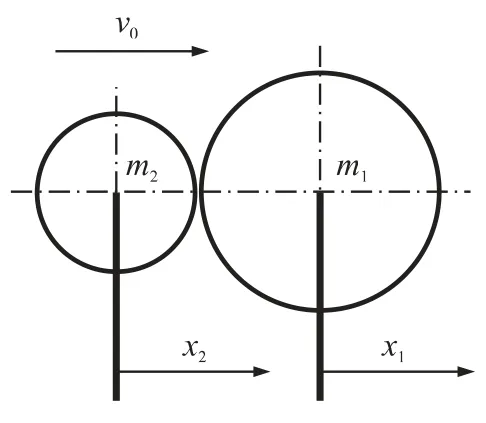
圖1 兩彈性球相撞
本文采用線性當(dāng)量化的方法,用等效彈簧-阻尼模型來模擬局部撞擊處的彈性擠壓這一非線性過程,其中彈簧剛度為K,阻尼系數(shù)為c,線性當(dāng)量化的彈簧-阻尼模型如圖2所示.
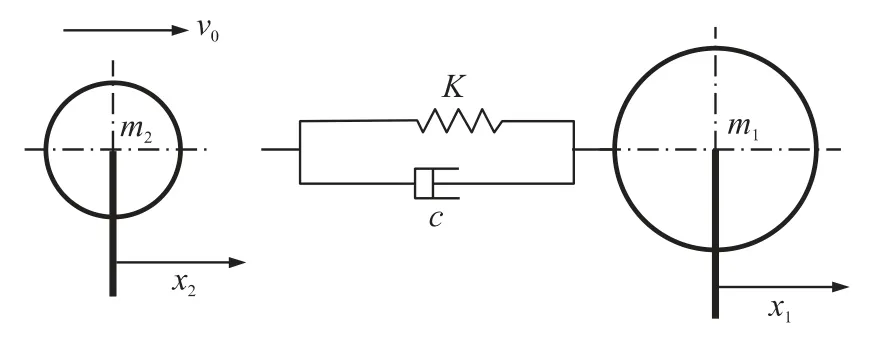
圖2 線性當(dāng)量化的彈簧-阻尼模型
當(dāng)彈簧-阻尼系統(tǒng)處于接觸狀態(tài)時,系統(tǒng)的運動微分方程為

初始條件x1(0)=0,x2(0)=0,1(0)=0,2(0)=v0,通過正則化方法計算得到2個小球的位移響應(yīng)為
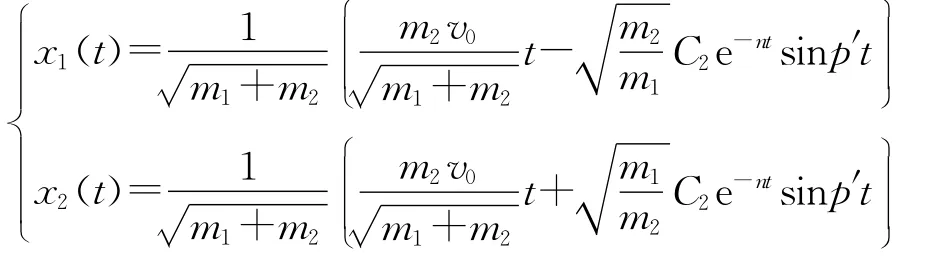
速度響應(yīng)為
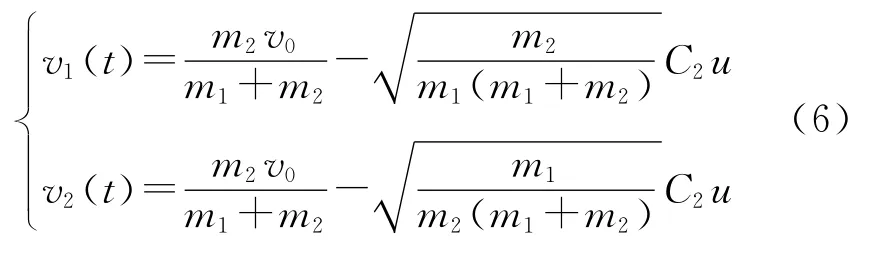
式中,

則兩小球在相撞過程中的相對距離為
設(shè)tm為碰撞過程達到最大擠壓量的時刻,此時(tm)=0,彈簧阻尼系統(tǒng)產(chǎn)生的作用力由彈簧提供,則:

將式(2)和式(3)代入式(8),得線性當(dāng)量化的剛度系數(shù)K為

阻尼系數(shù)的存在導(dǎo)致碰撞前后的能量損失.設(shè)時刻ts為兩小球碰撞結(jié)束時刻,則有:

取該分析模型具有物理意義的時刻,得到:

將式(11)代入式(6),得到兩小球碰撞結(jié)束時的能量為
用恢復(fù)系數(shù)法求得兩小球碰撞結(jié)束時的能量為

式中,e為恢復(fù)系數(shù).
2種計算方法求得的能量值相等,將式(12)和式(13)對比化解即可得到線性當(dāng)量化后的阻尼系數(shù)為

這與文獻[6]得到的結(jié)果一致.
將式(9)和式(14)代入式(1),取m=1便可得到用等效線性當(dāng)量化的彈簧-阻尼模型處理的接觸點處的法向接觸力.
從式(3)、式(9)和式(14)可以看出,該接觸碰撞模型的等效接觸剛度、阻尼系數(shù)和穿透深度除了與接觸處的材料參數(shù)有關(guān)外,還與相對碰撞速度有關(guān),它們在運動仿真過程中是變量.
1.2 摩擦力模型
接觸點的切向相對運動分為相對滑移和粘滯2種情況.接觸滑移狀態(tài)時可認為其摩擦力作用符合庫倫摩擦定律,即摩擦力大小與法向接觸力大小成正比,而方向與相對滑移速度方向相反:
式中,F(xiàn)f為接觸處的滑動摩擦力;μ(v)為摩擦系數(shù);接觸點的相對滑移速度v(δ,,t)≠0.而粘滯狀態(tài)的切向接觸力與靜摩擦系數(shù)有關(guān).接觸點處的運動量決定這2種狀態(tài)的相互切換.
ADAMS中為了避免數(shù)值計算中速度方向變化時出現(xiàn)摩擦力突變,摩擦系數(shù)μ處理為與相對滑移速度v(δ,t)有關(guān)的變化曲線,其表達式為
式中,vs和vd分別為粘滯轉(zhuǎn)換速度和動靜摩擦轉(zhuǎn)換速度,μs和μd分別為靜摩擦系數(shù)、動摩擦系數(shù),它們與兩接觸物體的材料屬性以及表面粗糙度等因素有關(guān).
2 多體系統(tǒng)動力學(xué)模型
2.1 虛擬樣機模型
本文研究的導(dǎo)彈發(fā)射系統(tǒng)是一個復(fù)雜的動力學(xué)系統(tǒng),為使仿真模型盡量簡化而又真實、合理,將其簡化為由導(dǎo)彈、發(fā)射筒、制導(dǎo)箱、方向機、高低機和發(fā)射基座等主要部分組成的多體系統(tǒng),各部分之間的拓撲關(guān)系如圖3所示.

圖3 系統(tǒng)構(gòu)件拓撲關(guān)系
利用UG建立系統(tǒng)的三維實體模型,確定構(gòu)件間的初始位置及裝配關(guān)系,并通過其與ADAMS的通用接口導(dǎo)入,建立虛擬樣機模型進行動力學(xué)仿真分析,主要過程如下.
①整個系統(tǒng)包括彈體、發(fā)射筒、制導(dǎo)箱、方向機、高低機、發(fā)射基座等33個主要剛體,包括移動副、旋轉(zhuǎn)副、圓柱副等在內(nèi)的31個運動約束,包括彈與筒,筒與4個滑軌,筒與閉鎖器,基座3個架腿與地面等18個接觸碰撞力;
②發(fā)動機推力和燃氣流后坐力通過實彈射擊測得,形成6個AKISPL樣條函數(shù);
③方向機阻尼油的作用特性由一個作用力矩等效,力矩大小等于阻尼系數(shù)與相對回轉(zhuǎn)角速度的乘積,力矩方向繞方向機的回轉(zhuǎn)方向且與其運動角速度方向相反;
④1個傳感器監(jiān)測導(dǎo)彈運行過程,當(dāng)導(dǎo)彈出筒時暫停仿真,輸出結(jié)果;
⑤不考慮發(fā)射筒、彈體的不平度,不考慮加工誤差引起間隙分布的隨機性;
⑥不考慮射手在射擊過程的作用力,即仿真過程為無控仿真.
2.2 接觸參數(shù)的確定
該型號導(dǎo)彈系統(tǒng)的彈體與發(fā)射筒質(zhì)量處于同一數(shù)量級.彈體定位塊與發(fā)射筒的接觸碰撞相當(dāng)于圓柱體與圓筒碰撞,設(shè)δ0為彈筒間隙,導(dǎo)彈半徑為r,發(fā)射筒內(nèi)半徑為R,R=r+δ0,則有:
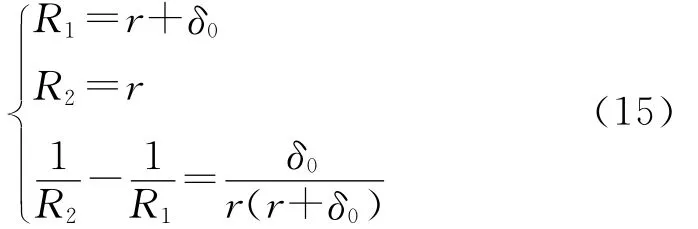
將式(15)分別代入式(3)、式(5)、式(9)和式(14),得導(dǎo)彈與發(fā)射筒接觸碰撞的動態(tài)接觸剛度、阻尼系數(shù)和穿透深度.
試驗射擊時,發(fā)射系統(tǒng)置于水泥地面,基座支架腿與地面的接觸面為弧形.因此將水泥地面看成一個曲率無窮大、質(zhì)量無窮大的鋼球,架腿與地面的接觸碰撞相當(dāng)于球形與球形的碰撞,且有:
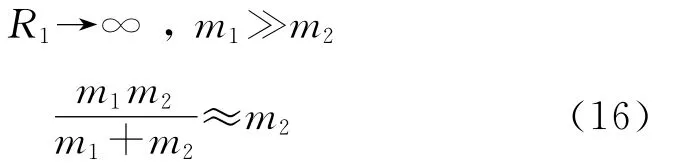
將式(16)分別代入式(3)、式(4)、式(9)和式(14)得架腿與地面的動態(tài)接觸剛度、阻尼系數(shù)和穿透深度.
類似地,計算其它接觸碰撞力.在Adams中,碰撞力的類型選用“Solid to Solid”,利用Adams強大的幾何搜索引擎判斷幾何體間的相對位置關(guān)系,接觸發(fā)生后調(diào)用接觸參數(shù)的計算程序,計算法向接觸力和切向摩擦力.
3 動力學(xué)仿真分析
影響導(dǎo)彈初始擾動的因素很多,如導(dǎo)彈安裝誤差、發(fā)動機推力偏差、導(dǎo)彈的動不平衡、初始瞄準(zhǔn)角、回轉(zhuǎn)器阻尼特性等,且許多干擾量都具有隨機性.為重點研究線性當(dāng)量化的接觸碰撞模型是否能較好地模擬系統(tǒng)的間隙接觸問題,這里將各干擾量考慮成固定值,通過多次實驗測量得到干擾量,并將其代入仿真模型進行模型驗證.
3.1 仿真模型驗證
以0°方向機初始方位瞄準(zhǔn)角和2.5°高低機初始高低瞄準(zhǔn)角的常溫、室內(nèi)、無控發(fā)射作為基本初始條件,彈筒間隙、導(dǎo)彈質(zhì)心偏移、發(fā)動機推力及燃氣流沖擊力的軸向分力和徑向偏差采用實驗測量均值,將前面所述接觸參數(shù)確定的方法代入該導(dǎo)彈發(fā)射系統(tǒng)的動力學(xué)模型中,仿真得到各構(gòu)件的動力學(xué)響應(yīng)曲線.將部分仿真結(jié)果與實驗數(shù)據(jù)進行對比,列于表1中.表中,vr為導(dǎo)彈出筒速度,t為出筒時間,ωrx、ωry和ωrz分別為導(dǎo)彈的傾斜角速度、偏航角速度和俯仰角速度,αr、βr和γr分別為導(dǎo)彈的傾斜角、偏航角和俯仰角.表1中,實驗值是多次室內(nèi)常溫?zé)o控發(fā)射實驗所測得的導(dǎo)彈姿態(tài)的平均值.導(dǎo)彈出筒時的俯仰角、偏航角為負值,這表明導(dǎo)彈出筒時的姿態(tài)為低頭右偏航,“—”表示無實測值.

表1 仿真結(jié)果與實驗結(jié)果對比
由表1可知,仿真結(jié)果的導(dǎo)彈出筒姿態(tài)與多次實驗的平均值很接近,說明用該模型來分析系統(tǒng)的動特性是可信的.
3.2 溫度對初始擾動的影響
實驗結(jié)果表明,發(fā)射溫度的變化會對導(dǎo)彈的初始擾動產(chǎn)生影響.通過實驗獲取燃料燃燒在常溫、低溫和高溫環(huán)境下對導(dǎo)彈產(chǎn)生的推力,并將實測結(jié)果輸入到系統(tǒng)模型中,其它因素保持不變,計算得到不同溫度下導(dǎo)彈運動姿態(tài)隨時間的變化曲線,如圖4所示.

圖4 3種狀態(tài)下導(dǎo)彈運動姿態(tài)變化曲線
從圖4可以看出,高溫發(fā)射時導(dǎo)彈出筒時間最短,低溫發(fā)射時出筒時間最長.相比常溫和高溫狀態(tài),低溫發(fā)射的導(dǎo)彈出筒傾斜角速度和俯仰角速度最大,偏航角速度更小.相比傾斜角速度和偏航角速度,由于俯仰角速度會受到導(dǎo)彈重力作用而下落,因此,俯仰角速度是需要重點關(guān)注的指標(biāo).綜合來看,低溫發(fā)射的初始擾動更大.不同溫度造成不同的初始擾動,其本質(zhì)為不同溫度下的發(fā)動機推力及推力偏差不同,這和發(fā)動機推力偏差對導(dǎo)彈出筒擾動影響較大的結(jié)論是吻合的.
3.3 初始方位瞄準(zhǔn)角對初始擾動的影響
導(dǎo)彈運動姿態(tài)隨方向機初始方位瞄準(zhǔn)角β0大小變化的部分仿真結(jié)果如圖5所示.
其中,0°方位表示2條支架腿朝后且一條支架腿朝發(fā)射方向的布置方式,180°方位與其相反.180°布置方式的出筒傾斜角速度和俯仰角速度均大于0°布置方式.因此,選擇3條支架腿布置方式時,2支架腿朝后且一條支架腿朝發(fā)射方向的方式更為合理.
同時,從仿真結(jié)果趨勢來看,初始方位瞄準(zhǔn)角在40°~60°之間,導(dǎo)彈俯仰方向初始擾動最大,但在360°方位射角內(nèi),導(dǎo)彈的出筒初始擾動幅值沒有超過0.2rad/s,滿足控制系統(tǒng)的穩(wěn)定性要求.
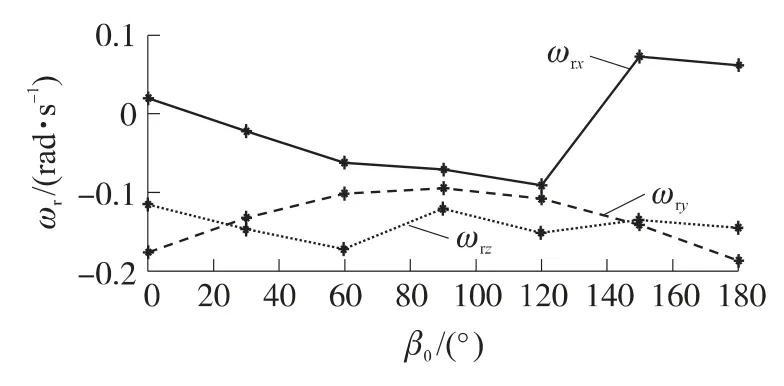
圖5 導(dǎo)彈出筒姿態(tài)隨初始方位瞄準(zhǔn)角的變化曲線
3.4 阻尼器特性對系統(tǒng)動特性的影響
制導(dǎo)箱是整個發(fā)射系統(tǒng)的重要部件,其運動特性將直接影響到導(dǎo)彈控制系統(tǒng)的穩(wěn)定性,而方向機的阻尼器是為保證系統(tǒng)穩(wěn)定性而設(shè)計的.圖6~圖8給出了方向機、制導(dǎo)箱和發(fā)射筒從導(dǎo)彈開始發(fā)射直到運動收斂至穩(wěn)定時,各自的角速度曲線.圖中ωh為方向機的回轉(zhuǎn)角速度,ωf為制導(dǎo)箱的俯仰角速度,ωt為發(fā)射筒的俯仰角速度,ch為阻尼器的阻尼系數(shù).
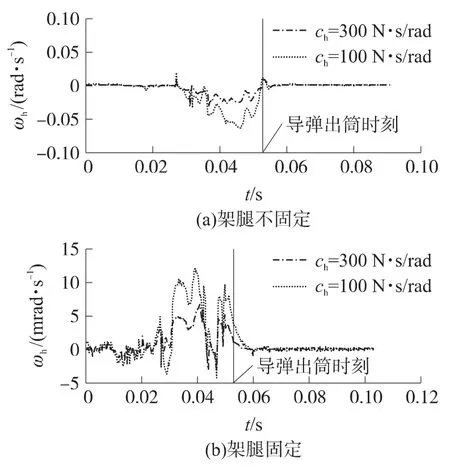
圖6 方向機回轉(zhuǎn)角速度運動曲線
圖6表明,方向機在阻尼器作用下迅速收斂,且改變支架腿與地面的連接方式為固定連接時,方向機的初始擾動量大大減小.
圖7表明,導(dǎo)彈發(fā)射出筒后,制導(dǎo)箱在初始激勵下經(jīng)過了約60ms收斂至0,支架腿與地面的固定連接方式使得制導(dǎo)箱初始擾動迅速減小.
同時,從圖6、圖7的對比曲線可以看出,阻尼器的阻尼系數(shù)對收斂速度影響不大,但對方向機以及與之相關(guān)的制導(dǎo)箱、發(fā)射筒等的回轉(zhuǎn)角速度大小影響很大.從仿真結(jié)果來看,為滿足戰(zhàn)術(shù)指標(biāo)要求,阻尼器阻尼系數(shù)在滿足射手舒適性要求的情況下,應(yīng)盡量大于300N·s/rad.
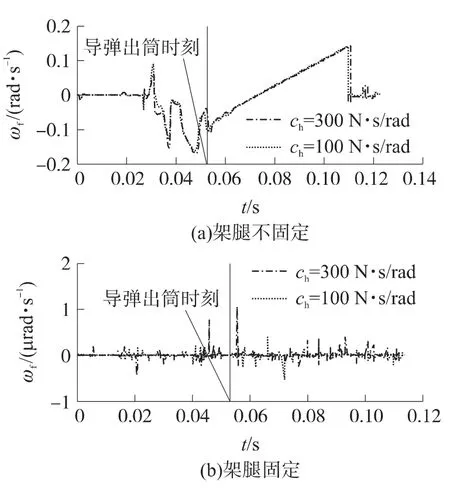
圖7 制導(dǎo)箱俯仰角速度運動曲線
圖8表明,在初始激勵下,發(fā)射筒經(jīng)過了約60ms收斂至0,支架腿與地面的固定連接方式減小了其初始擾動,但因為滑軌間隙的存在,仍然存在一定量的初始擾動,但增大了發(fā)射筒的運動收斂速度,系統(tǒng)穩(wěn)定性更好.
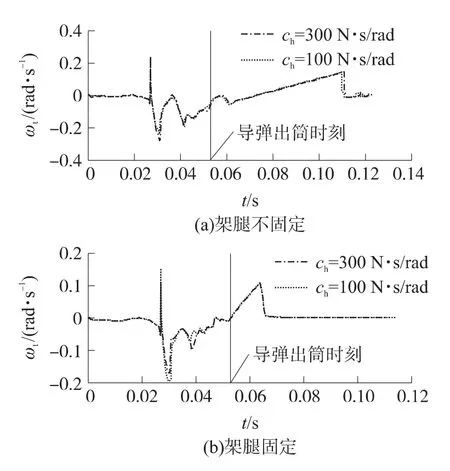
圖8 發(fā)射筒俯仰角速度運動曲線
圖9給出了支架腿不固定和固定2種情況下,導(dǎo)彈發(fā)射出筒過程的運動姿態(tài)曲線.從圖9看到,固定支架腿的連接方式使導(dǎo)彈偏航和俯仰運動幅值更小,運動更平穩(wěn).
綜合分析可知,增大架腿與地面的抓力可以增強系統(tǒng)的穩(wěn)定性.實際戰(zhàn)場運用時,由于有射手作用力的存在,射手利用身體施力于發(fā)射裝置上也會使得系統(tǒng)的運動擾動減小,穩(wěn)定性更好.
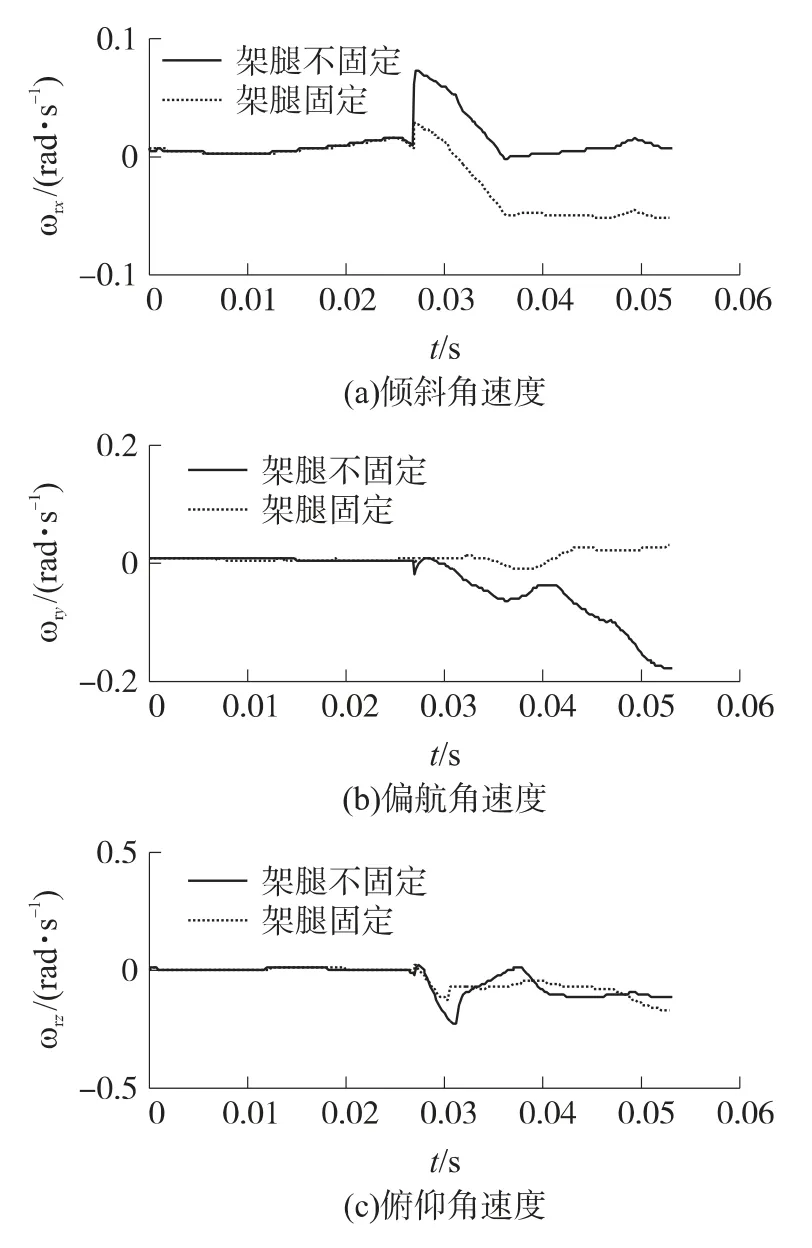
圖9 導(dǎo)彈出筒過程運動姿態(tài)曲線
4 結(jié)束語
基于彈性理論,將考慮動態(tài)接觸剛度、阻尼系數(shù)和穿透量的接觸變形碰撞模型應(yīng)用于某型號反坦克導(dǎo)彈發(fā)射系統(tǒng)的動力學(xué)建模中,借助ADAMS軟件得到了系統(tǒng)的動力學(xué)響應(yīng)結(jié)果.仿真結(jié)果基本符合試驗結(jié)果,證明了該碰撞模型是有效的.
①不同溫度引起不同發(fā)動機推力偏差,導(dǎo)致導(dǎo)彈初始擾動的變化,低溫發(fā)射條件下的初始擾動較大.
②初始方位瞄準(zhǔn)角對導(dǎo)彈初始擾動有影響,但仿真結(jié)果都滿足戰(zhàn)技指標(biāo).兩腿朝后的布置方式優(yōu)于兩腿朝前的布置方式.
③方向機阻尼特性對系統(tǒng)穩(wěn)定性有較大影響,阻尼器阻尼系數(shù)應(yīng)在滿足射手舒適性要求范圍內(nèi)盡可能大于300N·s/rad.
④支架腿與地面的連接方式對導(dǎo)彈系統(tǒng)的動特性有影響,增大支架腿的抓地力能使系統(tǒng)的初始擾動較小,穩(wěn)定性增強.
通過對本文提出的模型進行仿真分析,可以得到發(fā)射系統(tǒng)在不同條件下的作戰(zhàn)特性,這對該型號的武器系統(tǒng)性能分析和設(shè)計改進具有一定的參考價值.
[1]王志軍,趙文宣.火箭彈起始擾動數(shù)值仿真研究[J].彈道學(xué)報,1996,8(3):69-74.WANG Zhi-jun,ZHAO Wen-xuan.Numerical simulation on the initial disturbance of rockets[J].Journal of Ballistics,1996,8(3):69-74.(in Chinese)
[2]DUBOWSKEY S,DECK J F.On the limitation of predictions of the dynamic response of machines with clearance connections[J].ASME J of Machine Design,1994,116:883-841.
[3]HUNTER S C.Energy absorbed by elastic waves during impact[J].J Mech Phys Solids,1957,5(1):162-171.
[4]馬建敏,張文,鄭鐵生.轉(zhuǎn)子系統(tǒng)瞬時撞擊剛度的定量計算方法[J].應(yīng)用力學(xué)學(xué)報,2003,20(2):68-71.MA Jian-min,ZHANG Wen,ZHENG Tie-sheng.Quantitative calculation method of instantaneous impact stiffness of rotor system[J].Chinese Journal of Applied Mechanics,2003,20(2):68-71.(in Chinese)
[5]徐振欽,馬大為,樂貴高.基于碰撞接觸的彈管多體動力學(xué)建模與仿真[J].系統(tǒng)仿真學(xué)報,2007,19(5):965-968.XU Zhen-qin,MA Da-wei,LE Gui-gao.Multibody dynamics modeling and simulation of rocket and launching tube based on contact-impact theory[J].Journal of System Simulation,2007,19(5):965-968.(in Chinese)
[6]ANAGNOSTOPOULOS S A.Equivalent viscous damping for modeling inelastic impacts in earthquake pounding problems[J].Earthquake Engineering and Structural Dynamics,2004,33(8):897-902.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
