月球探測器定軌誤差分量協方差分析
2012-12-29 04:13:22樊敏董光亮郝萬宏王宏
航天器工程 2012年5期
關鍵詞:測量
樊敏 董光亮 郝萬宏 王宏
(北京跟蹤與通信技術研究所,北京 100094)
1 引言
在月球探測任務分析與設計階段,通常需要對地月轉移、月球捕獲、環月飛行等各軌道段的定軌預報精度進行全面分析,以確定中途修正、近月制動和動力下降等關鍵點的軌道精度,這是測控系統總體設計需要約定的重要指標之一。常用的環月軌道精度表示方式是定軌預報誤差及其RTN 方向的分量,其中R 方向指從月心指向探測器的方向,N 方向指軌道面法向,T 方向指在軌道面內與R、N 方向構成右手系的方向。考慮到定軌預報過程的復雜性,定軌誤差分量受到測量條件、軌道特性、地月位置關系等因素的影響,而且這些因素的作用是非線性的,因此,給出環月軌道定軌誤差RTN 分量的合理指標是一個難題。
針對上述問題,本文對測距、測速和干涉測量手段獲取的測量量建立測量模型,確定探測器狀態矢量的信息陣和誤差協方差矩陣,進而推導出定軌誤差RTN 分量的誤差方程和協方差矩陣,給出測量誤差對定軌誤差RTN 分量影響的數值關系。考慮到中國探月工程二期任務將實施月球軟著陸和巡視探測,開展月表地形地貌、月球地質構造、地月空間與月表環境探測和月基光學天文觀測等活動[1],為了保證著陸器能成功著陸到指定的著陸區,在任務分析與設計階段就要重點分析動力下降初始軌道定軌誤差及其RTN 方向的分量。為此,本文在理論分析的基礎上,根據中國探月工程二期任務的測站/基線分布情況,分析了不同環月軌道探測器位置誤差和速度誤差RTN分量的影響因素、誤差水平及3個方向的誤差分量,給出了不同環月軌道的位置誤差和速度誤差的各方向分量的不同特征。
2 測量模型和信息陣
中國月球探測任務的測定軌系統為S頻段統一測控系統+甚長基線干涉測量(USB+VLBI)綜合系統,它充分利用了USB 系統高精度測距測速和VLBI系統高精度測角的能力。在動力下降前的環月100km/15km 軌道段,測距測速數據由喀什站和佳木斯站獲取,VLBI干涉測量數據由上海站、烏魯木齊站、北京站和昆明站組成的不同基線獲取。在深空站和VLBI三站共視弧段內,測量數據包括1個測站獲取的測距ρ、測速ρ和2條不同基線獲取的時延D1、D2以及時延率D1、D2。
為了便于分析,在J2000地心天球坐標系中建立測距、測速和干涉測量時延、時延率測量量與探測器狀態矢量之間的關系,如圖1 所示[2]。其中:αg為格林尼治子午線的赤經;探測器狀態矢量的球坐標形式Xsph的分量為(r,α,δ,r,α,δ),直角坐標形式Xcar的分量為(x,y,z,x,y,z);測站坐標為(rs,zs,φ),測站位置矢量的柱坐標形式Rsta的分量為(rscosφ,rssinφ,zs)。
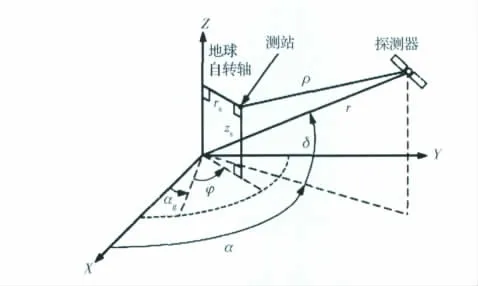
圖1 J2000地心天球坐標系中的探測器狀態矢量和測站位置矢量Fig.1 Probe state vector and station position vector in J2000geocentric celestial system
2.1 測距和測速的測量模型和信息陣
在圖1所示的坐標系中,測站的測距模型表示為式(1)。對于環月探測器,rs/r?1和zs/r?1成立。

式中:ρ為測站到探測器的距離。
將式(1)右端關于rs/r和zs/r展開[3],可得
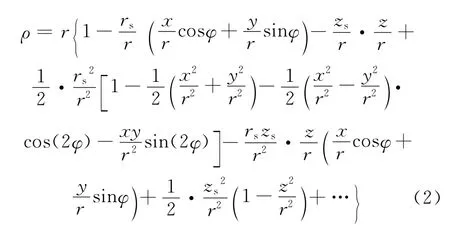
略去式(2)中rs/r和zs/r的高階項,并且將探測器位置矢量由直角坐標形式替換為球坐標形式,可得

測距觀測量包含的軌道信息內容可由信息陣定義,測距數據的信息陣為

式中:為測距數據誤差的方差。對式(3)兩端關于時間t求導,可得測速模型的近似表達式為[3]

式中:≈ωe,其中ωe為地球自轉平均角速度。
測速數據的信息陣為

式中:為測速數據誤差的方差。
2.2 時延和時延率的測量模型和信息陣
傳統的測距、測速數據能夠給出探測器在測站視向上的參數,對垂直于視向的橫向參數不敏感[4]。對于探月及更遠的深空探測任務,在某些特定的測站幾何構形條件下,只利用測距、測速數據,缺乏橫向角度信息的約束,會將探測器測站視向距離上的擾動估計為橫向(或天平面)位置上的偏差[5]。VLBI能夠對天體實現高精度的測角,而且具有測量周期短、測角精度高、只需發送下行信號等優勢[6]。經過數十年的發展,VLBI技術在各國深空探測器導航和相關科學領域得到了廣泛應用。美國國家航空航天局(NASA)的“火星勘測軌道器”(MRO)任務實現了2nrad的測角精度,日本宇宙航空研究開發機構(JAXA)的“月亮女神”(SELENE)任務對2個子探測器進行同波束干涉測量(SBI),時延精度達到皮秒級[7]。因此,中國探月工程采用測距測速+VLBI干涉測量聯合測軌體制進行軌道確定[8]。下面分析干涉測量時延、時延率數據的測量模型。
由于環月探測器距離地球很遠,時延測量量Ddelay可由式(7)近似計算。

式中:B為基線矢量,其柱坐標形式rB的分量為(rBcosφB,rBsinφB,zB),測站1、2的位置矢量柱坐標形式r1和r2的分量分別為(r1cosφ1,r1sinφ1,z1)和(r2cosφ2,r2sinφ2,z2),其中,rB=[(r1cosφ1-r2cosφ2)2+zB=z1-z2,φB =arctan[(r1sinφ1-r2sinφ2)/(r1cosφ1-r2cosφ2)];s為探測器-地心單位方向矢量,分量為(cosδcosα,cosδsinα,sinδ)。
根據時延的近似計算公式有[9]

式中:基線時角HB=φB-α。
時延觀測量的信息陣為

對式(8)兩端關于時間t求導,可得時延率的近似表達式為[10]

時延率觀測量的信息陣為
田卓聽完匯報也很興奮,鼓勵大家再努力一把,爭取在兩個月之內,就給這個活動畫上一個完美的句號。臨散會的時候,田卓還專門安排高潮說,高先生,你該提前做新的項目策劃了。從田卓的話音里,高潮可以感覺出她對自己的策劃能力認可了,心里的興奮又陡增了幾分。

3 誤差方程和誤差協方差矩陣
根據第2節給出的各種測量數據的測量模型,可以建立測量量Y和探測器狀態矢量Xsph之間的誤差方程。

探測器狀態矢量的誤差協方差矩陣為

式中:W為以測量量的誤差方差為對角線元素的對角矩陣。
根據測量量的信息陣,可得測量量信息陣和的逆矩陣為誤差協方差矩陣,見式(14)。

式中:Iρ、Iρ、ID1、ID2、ID1和ID2分別為1個測站的測距ρ、測速ρ和2條不同基線獲取的時延D1、D2以及時延率D1、D2的信息陣。
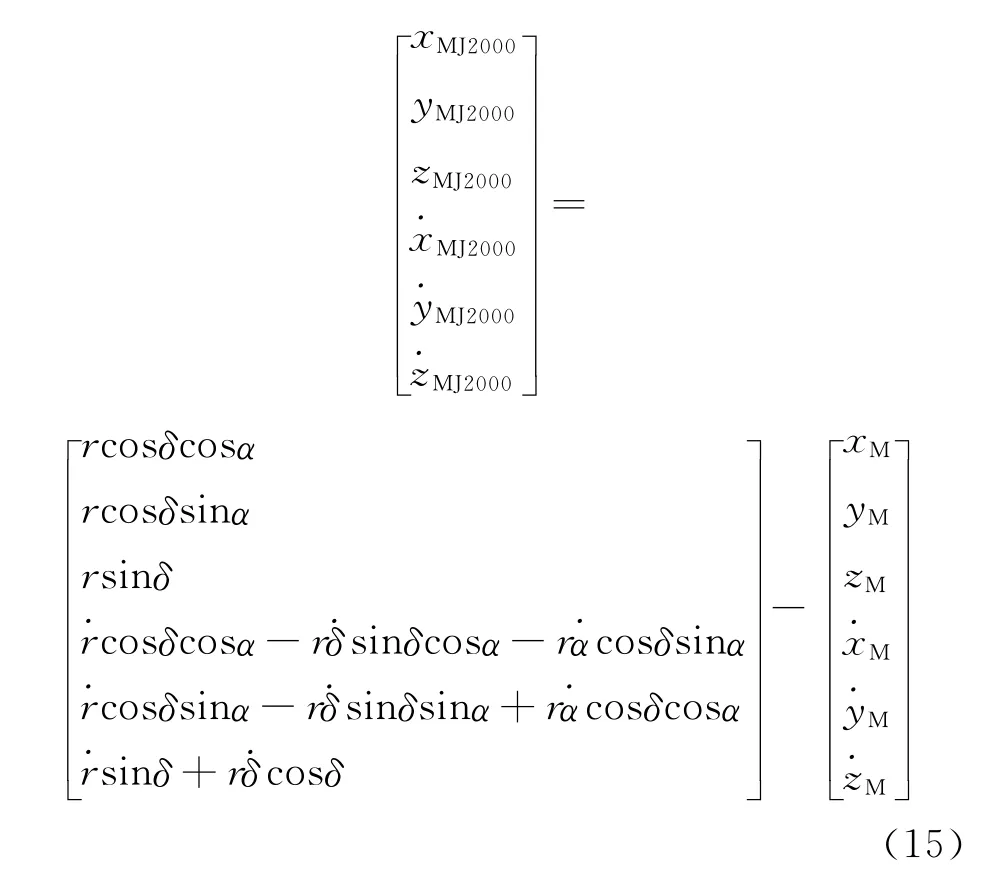
將式(15)記為XMJ2000=F(Xsph),其中F表示式(15)所確定的函數關系。對此式兩端進行全微分,在小偏差條件下,以增量符號代替微分符號,可得

根據式(12)可以建立探測器相對月心的狀態矢量和測量量之間的誤差方程,見式(17)。

探測器相對月心狀態矢量的誤差協方差矩陣為

根據RTN 方向的定義設定:R 方向的單位矢量為SR=rMJ2000/|rMJ2000|,N 方向的單位矢量為SN=rMJ2000×rMJ2000/|rMJ2000×rMJ2000|,T 方向的單位矢量為ST=SN×SR。其中,rMJ2000和rMJ2000分別為探測器在J2000 月心天球坐標系(MJ2000)中的位置 和 速 度 矢 量,其 分 量 分 別 為 (xMJ2000,yMJ2000,zMJ2000)和(xMJ2000,yMJ2000,zMJ2000)。將探測器相對月心狀態矢量的誤差投影到軌道的RTN 方向,可以得到位置誤差ΔP和速度誤差ΔV的RTN 分量,綜合考慮式(18),可得
式中:E3×3是由單位矢量SR、ST和SN構成的3×3矩陣;Q為探測器相對月心的狀態矢量誤差方程的系數矩陣。
探測器相對月心狀態矢量的RTN 分量的誤差協方差矩陣為
由于誤差方程的系數矩陣Q和誤差協方差矩陣URTN的表達式涉及到探測器的狀態矢量、各測站/基線的位置矢量及變化率等多個變量及其相互關系式,表達式非常復雜,略去推導的過程,直接給出分析結果如下。
1)位置誤差的RTN 分量(ΔPR、ΔPT和ΔPN)
ΔPR、ΔPT和ΔPN均與Δρ、ΔD1和ΔD2相關,即探測器位置誤差受到測距、2條基線的時延測量誤差的影響。根據上述計算結果可得

式中:下標C分別代表R、T 和N,相應的SC分別代表單位矢量SR、ST和SN;αi,βi,γi(i=1,2)為基線對位置誤差的影響系數。
由式(21)可見,位置誤差的RTN 分量主要與探測器相對月心的位置矢量對(r,δ,α)偏導數的RTN 分量相關,還與測站/基線的時角、測站地心距及基線長度等因素相關。
2)速度誤差的RTN 分量(ΔVR、ΔVT和ΔVN)
ΔVR、ΔVT和ΔVN均 與Δρ、Δρ、ΔD1、ΔD1和ΔD2、ΔD2相關,即探測器速度誤差受到測距、測速、2條基線的時延、時延率測量誤差的影響。根據上述計算結果可得

式中:α′i,β′i,γ′i,ε′i,η′i,ξ′i(i=1,2,3,4)為基線對速度誤差的影響系數。
由式(22)可見,速度誤差的RTN 分量與探測器相對月心的狀態矢量對(r,δ,α,r,δ,α)偏導數矢量的RTN 分量相關,也與測站/基線的時角、測站地心距及基線長度等因素相關。
4 不同環月軌道的誤差RTN 分量
根據上述分析可知,當測站/基線位置、測量類型和測量精度已經確定時,探測器定軌誤差的RTN 分量主要與其狀態矢量、測站/基線的時角及變化率有關,即主要與軌道特性和測站/基線與探測器之間的幾何關系有關。下面在給定測站/基線位置、測量類型和測量精度的情況下,分析2 種典型環月軌道的誤差RTN 分量的影響系數和誤差水平。
選取中國4個VLBI測站中的2條基線——基線1(佘山-烏魯木齊)、基線2(密云-昆明)和USB測站中的青島站,參考歷元時刻為2010-10-28 T16:10:00.00(UTC),測 量 精 度 為σρ=5 m,σρ=1cm/s,σD=5ns,σD=1ps/s。2 種不同類型環月軌道的軌道根數如表1所示。

表1 2種軌道具體軌道根數(月心J2000慣性坐標系)Table 1 Elements of two orbits(J2000lunarcentric inertia system)
根據上述誤差協方差分析過程,可以計算出2種不同軌道的位置誤差和速度誤差RTN分量的均方差和部分影響系數,如圖2和表2所示。由此可見,對于2種不同的軌道,當測站/基線位置、測量類型和測量精度已經確定時,位置誤差和速度誤差的量級一致,但誤差RTN 分量有明顯差別。誤差RTN 分量的具體特征如下。
(1)對于軌道1,位置誤差和速度誤差的RTN分量特征類似,即R 方向和T 方向分量相當,約為N 方向分量的1/2。
(2)對于軌道2,位置誤差和速度誤差的RTN分量特征不同。位置誤差的R 方向和T 方向分量相當,約為N 方向分量的9倍;速度誤差的T 方向分量最大,約為N 方向分量的6 倍,R 方向分量次之,約為N 方向分量的5倍。
(3)比較各測量量對RTN 分量的影響可得:對于軌道1,測距量對N 方向分量影響相對較小,基線1時延量對R、T、N 方向影響較平均,基線2時延量對N 方向影響較大;對于軌道2,測距量對N方向分量影響相對較大,基線1 時延量對T 方向影響較大,基線2時延量對R 方向影響較大。
根據上述分析過程,對嫦娥-1、2(Chang’e-1、2)月球探測器的100km/15km 環月軌道近月點位置速度誤差的RTN 分量進行分析,將誤差RTN分量的均方差與實測數據定軌結果進行比較,如表3 所示。可以看出,由于分析中僅考慮測量誤差,而實際定軌誤差還受到模型誤差、測量數據精度等多種因素的制約,因此2 種結果的誤差RTN 分量具體值有所差異,但是各誤差分量的大小比例和特征類似。在后續任務總體設計過程中,可以參考已有任務環月軌道的位置和速度總誤差,利用本分析方法對誤差RTN 分量進行分配,得到定軌誤差的RTN 分量作為參考值。
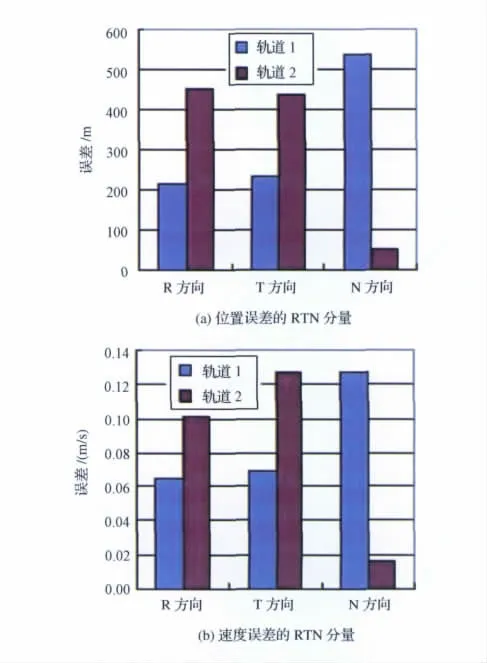
圖2 不同軌道的位置誤差和速度誤差的RTN 分量Fig.2 RTN components of errors in position and velocity for various orbits
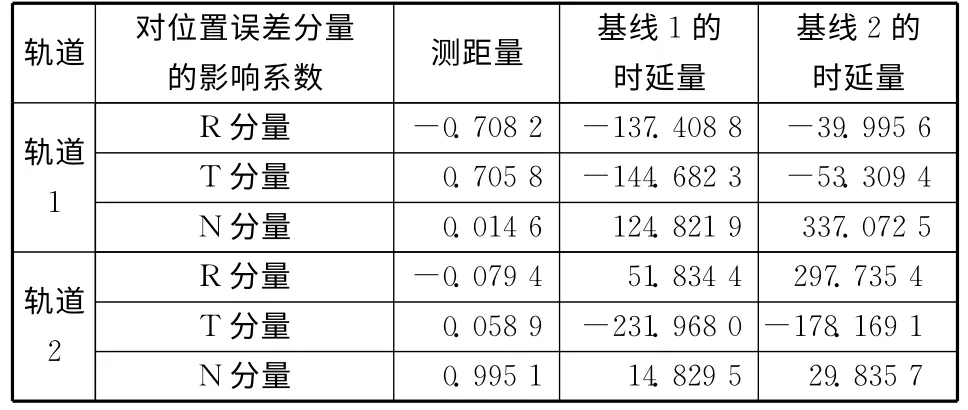
表2 各種測量量對不同軌道的位置誤差RTN 分量的影響系數Table 2 Influence coefficients of each measurement for RTN components of position errors of various orbits

表3 嫦娥-1、2定軌誤差RTN 分量的均方差Table 3 RMS of RTN components of orbit-determination errors for Chang’e-1and Chang’e-2probes
5 結束語
本文首先根據各種測量數據的定義和近似公式,建立了中國探月工程中使用的軌道測量數據關于月球探測器狀態矢量的模型,確定了狀態矢量的信息陣和誤差協方差矩陣;然后,推導了環月軌道定軌誤差RTN 分量的誤差方程和協方差矩陣,給出了測量誤差對定軌誤差RTN 分量影響的數值關系,在此基礎上,考慮中國探月工程中測控系統測站/基線分布情況和測量精度,分析了2種不同環月軌道位置誤差和速度誤差RTN 分量的影響因素、誤差水平及3個方向的誤差分量;最后,利用嫦娥-1、2探測器100km/15km 環月軌道實際定軌結果,驗證了分析方法的有效性。這種分析方法對于中國探月工程二期任務動力下降初始軌道位置誤差和速度誤差RTN 分量計算具有參考意義。隨著中國未來月球與深空任務論證分析工作的逐步開展,探測器系統對關鍵軌道機動時刻定軌誤差RTN 分量的需求將會更加明確,后續應考慮多種誤差因素以及不同測量弧段和測量數據類型對定軌誤差RTN 分量的影響,進而補充、完善該分析方法,這將有利于測控系統對誤差RTN 分量進行準確、細化分析。
(References)
[1]褚桂柏,張熇.月球探測器技術[M].北京:中國科學技術出版社,2007:127-130
Chu Guibai,Zhang He.Lunar probe technology[M].Beijing:Chinese Science and Technology Press,2007:127-130(in Chinese)
[2]李海濤.深空導航無線電跟蹤測量技術[M].北京:清華大學出版社,2005:8-9
Li Haitao.Radiometric tracking techniques for deep space navigation[M].Beijing:Tsinghua University Press,2005:8-9(in Chinese)
[3]Ondrasik V J,Curkendall D W.A first-order theory for use in investigating the information content contained in a few days of radio tracking data[R].Pasadena,California:Jet Propulsion Laboratory,1971
[4]郝萬宏,董光亮,李海濤.無線電干涉測量在深空航天器導航中的應用[J].飛行器測控學報,2009,28(4):1-7
Hao Wanhong,Dong Guangliang,Li Haitao.An introduction to application of radio interferometry in deep space navigation[J].Journal of Spacecraft TT&C Technology,2009,28(4):1-7(in Chinese)
[5]Melbourne W G.Navigation between the planets[J].Scientific American,1976,234(6):58-74
[6]Berry D S,Border J S.CCSDS concept paper:Delta-DOR[R/OL].[2012-03-01].http://mailman.ccs-ds.org/piper-mail/sls-rn-g/attachments/20050811/67dfd381/delta-DOR-Concept-Paper.pdf
[7]Kikuchi F,Liu Q,Hanada H,et al.Pico-second accuracy VLBI of the two sub-satellites of SELENE(KAGUYA)using multi-frequency and same beam methods [J].Radio Science,2009,44(2):doi:10.1029/2008RS003997
[8]Yu Zhijian,Dong Guangliang,Li Haitao,et al.Implementation of the ground TT&C system for China’s Chang’e-1lunar exploration spacecraft[J].Journal of Astronautics,2007,28(4):1-3
[9]Thurman S W.Deep-space navigation with differenced data types,Part I:differenced range information content,TDA Progress Report 42-103[R].Pasadena,California:Jet Propulsion Laboratory,1990
[10]Estefan J A,Thruman S W.Deep-space navigation with differenced data types,Part III:an expanded information content and sensitivity analysis,TDA Progress Report 42-109[R].Pasadena,California:Jet Propulsion Laboratory,1992
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00