一種新型數控可變電感的研究與設計*
2012-12-30 09:48:00劉漫霞陳古典
電子器件 2012年4期
關鍵詞:設計
劉漫霞,張 輝,陳古典,龔 文
(中山大學智能交通研究中心,廣州510006)
近年來,電路系統的數字化控制需求日益增加,因此往往需要電路中的各種原件參數也能夠進行數字化調節和控制,數控電阻[1]、數控電容[2]等可以通過數字控制參數的電路元器件應運而生。但是,由于電感換路過程中出現的過壓等問題[3],使得電感量數字可控的電感元件難以實現。
目前,電感元件電感量的改變通常采用機械式調節,其基本方式包括:磁芯可調電感器、銅芯可調電感器、滑動接點可調電感器、串聯互感可調電感器和多抽頭可調電感器[4-7]等。這些方式很難實現實時在線自動調節,且不能夠按照使用者需求來精確定量控制電感值的大小。因此在實際應用中存在很大的局限性。因此,需要設計一種電感量電子可調的結構和方法,才能實現電感量的數字化控制。已有一些學者應用電力電子技術設計,實現電感量的電子調節[8],但是由于其結構和成本方面的原因,通常應用于電力網絡中,并不適合一般電子線路的使用。
為此,本文針對這一問題,應用電感間的互感特性,設計了一種結構簡單,適用于一般電子線路的新型數控可變電感,實現了電路中電感量的數字化控制。
1 數控可變電感設計原理
由一般電路知識[3]可知,當兩個電感距離比較近,且其中都有電流流過時,兩者電磁場會相互影響導致兩個電感的特性發生改變,兩者之間影響的大小即為兩個電感之間的互感。本文設計的可變電感就是應用了這一基本特性。其基本原理如圖1所示。
圖1中,電感L1即為接入電路的被控制電感稱為主電感;電感L2稱為附屬電感,用于調節和控制,且電感L1和電感L2之間的互感為M。設L1接入電路后兩端的電壓為ui,流經L2的電流為i1;控制電路按照ui的大小產生一個電壓kui加載在附屬電感L2兩端,流經L2的電流為i2。
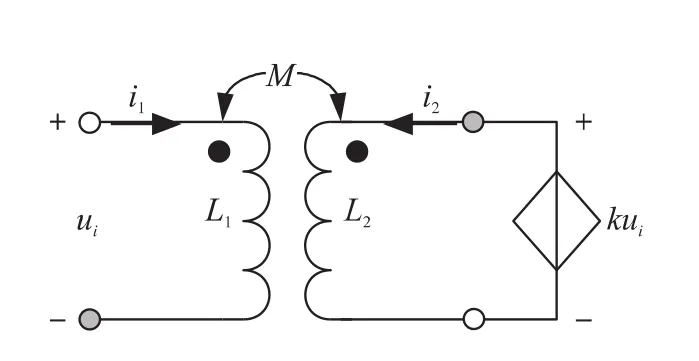
圖1 可變電感原理結構圖
此時,圖1的原理結構圖中主電感L1和附屬電感L2兩個回路中可以推導出以下兩個等式:
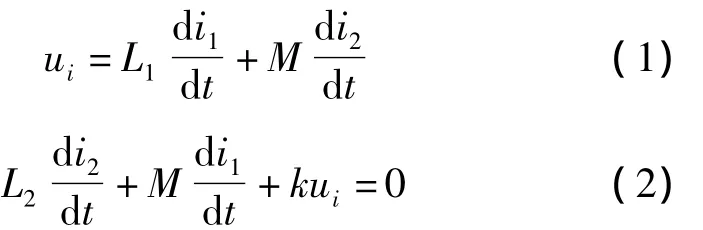
對于正弦交流輸入[9],不考慮瞬態過程[10]的情況下,式(1)和式(2)的穩態表達式為:

其中,I1是流經電感L1的穩態電流,I2是流經電感L2的穩態電流,Ui是L1接入電路后的穩態電壓。
由式(3)、式(4)可得到主電感輸入端的等效電抗為:

對比式(5)和一般電感Lx的感抗特性:

其中,UL為電感上交流電壓的幅值,IL為電感上交流電流的幅值,可以發現對于主電感輸入端,其等效電感為:

由式(7)可知,L1,L2,M都是定值,等效電感L值的只與放大倍數k值的大小相關。因此可以通過改變k值的大小來調節等效電感L的電感量。
根據以上討論,只需設計一個數字可控的放大器,對主電感的電壓進行k倍的放大作為附屬電感的驅動信號,即可實現對電感參數的數字化控制。
2 電感調節控制電路模塊設計
為了實現式(7)的電感量控制,本設計如圖2所示的數控可變電感電路,其主要包括:主電感L1,附屬電感L2,以及控制電路——電壓跟隨器電路、比例運算電路、數字電位器電路和功率放大電路。
(1)電壓跟隨器電路一
電壓跟隨器電路的主要功能是提高輸入阻抗,減小對前級電路的負擔,在所設計的電路結構中,電壓跟隨器1主要保證控制電路不對主電感所在的主回路電壓電流造成額外干擾;電壓跟隨器2主要用于減小數字電位器的負載,降低輸出電流。這兩個跟隨器電路可以統一采用運算放大器構成的跟隨器(結構如圖3所示),它不僅結構簡單,而且輸入輸出之間沒有相位差,不會對式(7)的實現造成不利影響。

圖2 數控可變電感結構示意圖
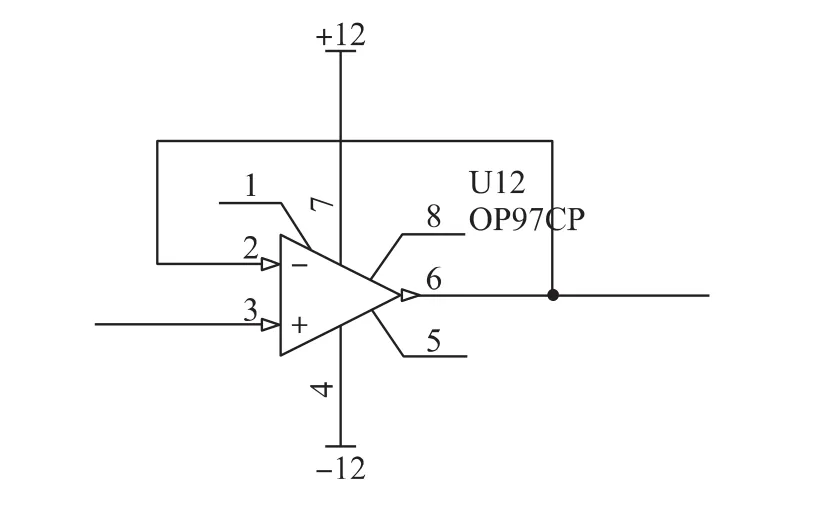
圖3 電壓跟隨器電路
(2)數字電位器電路模塊
數控可變電感的核心在于設計數字可控的放大器,根據輸入的數字量調節放大系數k以實現電感參數的數字可控。而數字電位器正是這樣一種器件,他可以根據輸入數字指令準確地進行電阻值調節,從而實現對輸入信號的分壓。本文采用X9241數字電位器實現這一過程。

圖4 數字電位器X9241電路圖
數字電位器X9241的電路圖如圖4所示,其中,SCL和SDA分別為I2C總線的時鐘線和數據線,用于接收外部的數字指令,需要加上拉電阻,起限流和輸出高電平的作用[11]。數字電位器X9241里有4個電位器,本電路中使用第3個電位器,即高端、低端和滑動端分別為VH2、VL2和VW2。VL2接經過跟隨器隔離的輸入信號ui,VH2接地,VW2端則輸出經過數字電位器改變的輸出信號kui。
外部控制系統通過SDA和SCL給X9241發送數據指令,改變數字電位器滑動計數寄存器(WCR)的數值(最大為63,最小為0),k1隨即發生變化,其具體表達式可以表示為:

因此0≤k1≤1。例如,當滑動端的數據內容為10時,k1=10/63。
(3)比例運算電路
由于數字電位器只能實現分壓的功能,即它的調節系數0≤k1≤1,數值范圍過小,往往難以滿足實際需要,為此加入比例運算環節,將數字電位器的輸出信號進行k2倍放大,進而得到附屬電感上的加載電壓值kui=k1k2ui。其中k2可以通過同相比例運算電路實現,結構如圖5所示。同相比例運算電路中,輸出電壓與輸入電壓成正比關系,且二者相位相同[11],放大系數k2為:


圖5 同相比例運算電路
(4)功率放大電路
通過數字電位器和比例運算電路初步的確定了一個變化系數k值之后,需要功率放大電路來放大電路的輸出功率,從而推動電感L2工作,使其與電感L1產生互感效應,最終實現可變電感的數字可控。
功率放大電路采用的無輸出電容的功率放大電路(OCL電路),如圖6所示。這一電路不對輸入信號的電壓幅度進行放大(即放大系數為1),只提高電流的輸出能力用以驅動較重的負荷。其特點是結構簡單,輸入輸出之間沒有相位差。

圖6 功率放大電路
3 實驗測試結果與分析
為了驗證電路的有效性,應用第2節所述電路進行實驗測試,在L1=L2=65 μH,k2=10的條件下,調節WCR值,通過諧振頻率法測得對應的電感值如表1所示。從表1中可見,電感值與WCR的數值呈反比,即電感值隨著k值的增大而減小,與式(7)的規律一致。

表1 數控可變電感調節實驗結果
通過對WCR的階梯性調節改變電感值,記錄結果如圖7所示。從結果中可以看出其響應較為迅速,不存在顯著的過渡過程,可以適應連續調節。
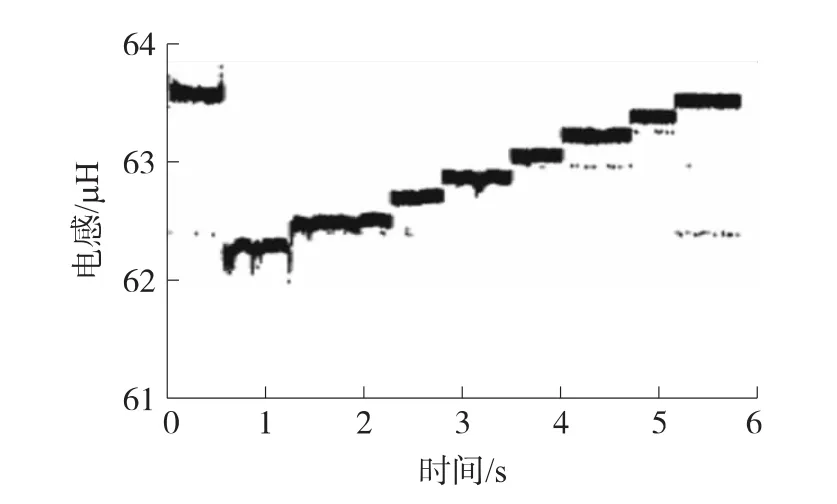
圖7 數控可變電感連續調節實驗
實驗結果表明,所設計的數控可變電感完全可以實現電感的數字可控。但是,由于互感值比較小,因此在k2=10的情況下,調節范圍比較小,想獲得大的調節范圍可以增大k2,或者將比例運算電路改為反相比例放大器。另外,由于控制量k位于式(7)的分母上,它與等效電感值之間不是線性關系,實際使用中需要注意。
4 總結
所設計的數控可變電感在克服了傳統機械式可變電感不能實時在線數字化控制的缺點,而且結構簡單,設計靈活,可以針對不同的主電感電流、電壓要求進行設計,是一種較為方便的電感數字化調節方案。另外,需要指出的是,本文設計的數控可變電感采用了多個集成運算放大器來實現,其適用電壓范圍、工作頻率范圍均受集成運算放大器對應性能的影響。
[1]張立科,付永慶,宋寶森.基于網絡可操控的電阻元件實現技術[J].實驗室研究與探索,2007,26(3):54-55,60.
[2]張嶺,孫宏志,梅棟良,等.基于PSCAD/EMTDC的數控電容在PWM整流器中的應用仿真研究[J].電子技術應用,2011,37(9):74-76.
[3]Paul R Gray,Paul J Hurst,Steven Lewis.Analysis and Design o Analog Integrated Circuits[M].John Wiley & Sons Inc,2009.
[4]Hirohito Funato,Kenzo Kamiyama,Atsuo Kawamura.A New In stantaneous Power Flow Control Method Using Variable Inductance Realized by Variable Active-Passive Reactance[J].T.IEE Japan 2000,120(10):1205-1211.
[5]Cho G C,Jung G H,Cho G H.Analysis and Design of Power Efficient Classed Amplifier Output Stages[J].IEEE Trans.on Circuits and Systems,1996,11:57-65.
[6]Akira Tanabe,Ken’ichiro Hijioka,Hirokazu Nagase.A Novel Vari able Inductor Using a Bridge Circuit and Its Application to a 5-20 GHz Tunable LC-VCO[J].IEEE Journal of Solid-State Circuits 2011,46(4):883-892.
[7]Hamill D C,Tavakoli Bina M.The Bootstrap Variable Inductance and Its Applications in AC Power Systems[C]//Applied Power Electronics Conf.,1999,2:896-902.
[8]龍云,肖國春,王兆安.電力電子可變電感的原理與實現[J].電力電子技術,2006,40(5):13-15.
[9]鄭莉平,候浩錄,王宏江.空心電抗器電感的解析計算[J].電子器件,2011,34(4):392-394.
[10]蘇振中,武占成,羅錦.瞬態沖擊電流測量傳感系統的研究[J].傳感技術學報,2002,4:307-310.
[11]胡漢才.單片機原理及接口技術[M].清華大學出版社,2006 114-117.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04