基于人機工程的自卸車操縱桿舒適度分析
2013-01-07 05:19:08呂勝谷正氣伍文廣梁小波彭國普
中南大學學報(自然科學版) 2013年9期
呂勝,谷正氣,伍文廣,梁小波,彭國普
(1. 湖南大學 汽車車身先進設(shè)計制造國家重點實驗室,湖南 長沙,410082;2. 湘電重型裝備股份有限公司,湖南 湘潭,411100)
現(xiàn)代汽車設(shè)計強調(diào)以人為中心,舒適性已經(jīng)成為汽車駕駛室設(shè)計的重要思想。目前,國內(nèi)自卸車駕駛室基本都是按照美國機動車協(xié)會(SAE)推薦的方法進行布置,且現(xiàn)有的基于關(guān)節(jié)角度[1?2]的舒適性評估方法存在局限性,人體的不舒適性主要由2個方面引起:一是關(guān)節(jié)角度,二是關(guān)節(jié)力矩。在操作過程中,關(guān)節(jié)力矩是一個重要影響因素,為此,本文作者基于Kane動力學方程建立上肢的動力學模型,求解推拉操縱桿時的關(guān)節(jié)力矩,對現(xiàn)有的基于關(guān)節(jié)角度的舒適度模型進行改進,將力矩因素引入舒適性評估中。
1 人體上肢生物力學模型
首先建立人體上肢的動力學模型。人體上肢的運動主要由肩關(guān)節(jié)、肘關(guān)節(jié)和腕關(guān)節(jié)的相對運動來實現(xiàn),基于人體上肢的駕駛動作分析可將人體上肢系統(tǒng)簡化為 3個連桿(即上臂、前臂和手腕)組成的鉸鏈機構(gòu),對人體進行如下簡化:忽略各部分的形變,將其視為剛性桿,上臂對肩關(guān)節(jié)取為3個自由度(即上臂水平屈伸、上臂側(cè)舉、上臂旋轉(zhuǎn)),前臂對肘關(guān)節(jié)的自由度取為1個(即前臂彎曲),手對腕關(guān)節(jié)的自由度取為1個(即前臂彎曲),建立上肢的三連桿五自由度模型。考慮到人體上肢構(gòu)造,各剛性桿的質(zhì)心和形心不重合。在計算中,人體尺寸[3]設(shè)計規(guī)范取第50百分位,上肢各體段的長度、質(zhì)量、質(zhì)心、轉(zhuǎn)動慣量、關(guān)節(jié)活動范圍可由運動生物力學[4]獲得,其值如表1所示。
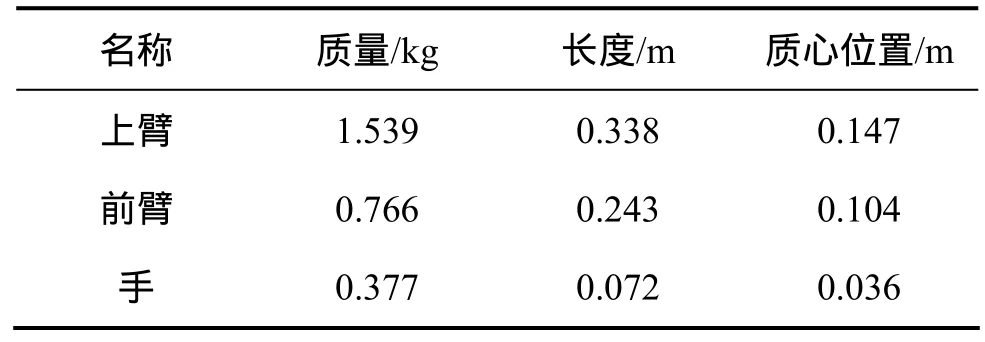
表1 上肢各體段生物力學參數(shù)Table 1 Biomechanics parameters for body segments of upper limb
為了表示駕駛員的上肢的空間位置,建立如下坐標系[5?6]:e為慣性參考系,其坐標原點O位于以肩關(guān)節(jié)為鉸鏈的鉸鏈中點;e1的正向是從后背到前胸,e2的正向是從軀干軸心到外側(cè),e3的正向是由上向下;上肢各段的固聯(lián)坐標系為e(t),上肢各段的軸向為e1(t)。e2(t)垂直體段軸向并指向外,當上肢抬起至水平時,e(t)與e的方向相同。
設(shè)肩關(guān)節(jié)的內(nèi)收外展為a1,前屈后伸角為a2,旋轉(zhuǎn)角為a3,對應各角度作用在肩關(guān)節(jié)處的關(guān)節(jié)力矩分別為M1,M2和M3;肘關(guān)節(jié)的前屈后伸角為a4,對應的肘關(guān)節(jié)力矩為M4,腕關(guān)節(jié)的前屈后伸角為a5,對應的腕關(guān)節(jié)處的力矩為M5;F為操縱桿對上肢運動鏈末端手腕的反作用力;G1,G2和G3分別為上臂、前臂和手腕的重力。人體上肢的動力學模型如圖1所示。
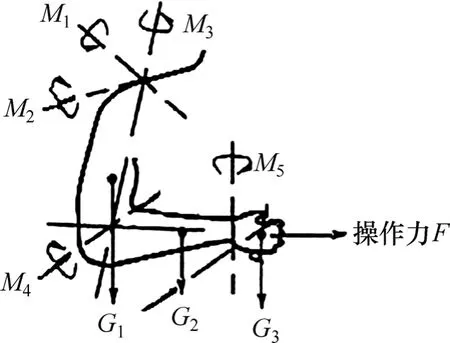
圖1 人體上肢生物力學模型Fig.1 Biomechanics model for upper limb
2 理論介紹
2.1 Kane方法基本原理
Kane方法[7?8]是建立在廣義速率、偏速度、廣義主動力、廣義慣性力等概念基礎(chǔ)上,其表述式為

式中:Fr為系統(tǒng)廣義主動力;為系統(tǒng)廣義慣性力。假設(shè)系統(tǒng)有k個剛體,n個廣義速度(即自由度),因為廣義主動力是外力(包括力和力矩)和第j點的偏速度的點積。廣義慣性力是(包括慣性力和慣性力矩) 和第j點的偏速度的點積。
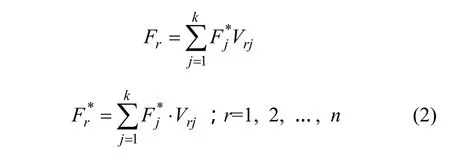
式中:r為廣義坐標數(shù)(即系統(tǒng)自由度);j為剛體數(shù)目。Kane方程通過周密推導和證明得出結(jié)論:作用在系統(tǒng)上的對應每個廣義速度的廣義主動力和廣義慣性力的代數(shù)和為0。
本文中的上肢模型有3個剛體和5個自由度,即k=3,n=5。本文只考慮上肢處于靜止狀態(tài)的情況,此時,,也就是通過求解方程組即可獲得下肢三關(guān)節(jié)在每個自由度上的肌肉力矩。
2.2 NASA力量模型
從NASA力量模型[9]可知:關(guān)節(jié)各個自由度上的舒適度Cr與關(guān)節(jié)力矩的關(guān)系可用線性函數(shù)表示,且該函數(shù)跟關(guān)節(jié)無關(guān)。

式中:Dr為關(guān)節(jié)各個自由度上的不舒適度;Mr為自由度上關(guān)節(jié)力矩,可以通過上面敘述的Kane方程求解;Mrmax為此自由度上關(guān)節(jié)最大可承受力矩。
最大可承受力矩可用下式獲得:

式中:b0,b1和b2分別為最小二乘法的擬合系數(shù),分別依據(jù)轉(zhuǎn)動角度、轉(zhuǎn)動方向和轉(zhuǎn)動角速度查系數(shù)表[10]獲得;其他角速度用插值法獲得,θ為此時的關(guān)節(jié)角度。
Cr越大,表示實際關(guān)節(jié)力矩與最大關(guān)節(jié)力矩比值越小,可用剩余力矩越大,人操作時相應感到舒適。取舒適性水平Cr為0.4,即當實際力矩不大于最大力矩值的60%時認為操作是舒適的。
本文研究轉(zhuǎn)動方向和轉(zhuǎn)動角速度為某一定值時的情況下,各關(guān)節(jié)角度取不同值的舒適度狀況,從而獲得操縱桿的舒適操作范圍。
3 單關(guān)節(jié)舒適度評價與分析
3.1 典型駕駛姿勢駕駛姿勢定位
用UG建立自卸車的駕駛室模型,然后導入人機工程分析軟件RAMSIS中定位典型姿勢。RAMSIS軟件(即模擬乘員實際操作狀況的計算機輔助人體數(shù)學模型)是一款專門用于人機工程性能校核的軟件,它是由德國各大汽車公司和座椅廠家共同開發(fā)的 CAD工具。得到的效果圖如圖2所示。
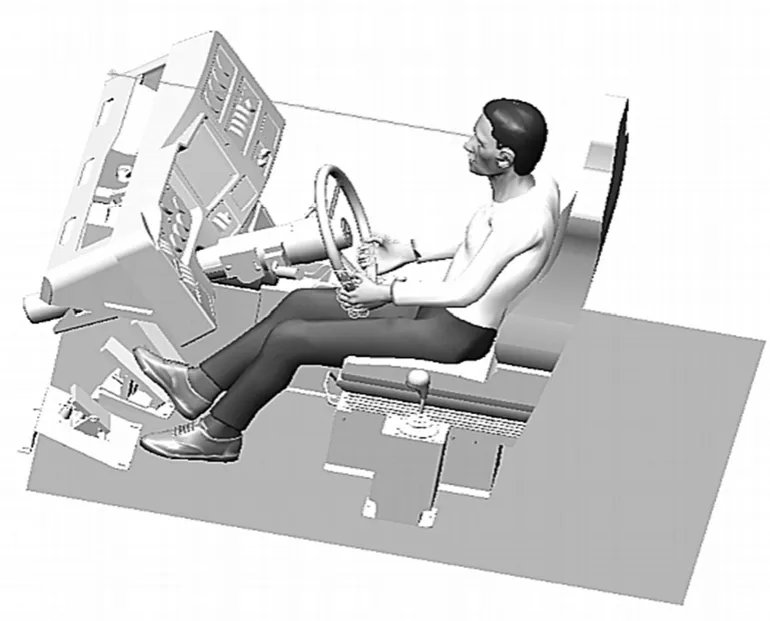
圖2 人體駕駛典型姿勢Fig.2 Typical posture for dump truck driving
3.2 操作力F對關(guān)節(jié)力矩的影響
由于操縱桿的位置主要由肩關(guān)節(jié)的前屈后伸角a1、肩關(guān)節(jié)的內(nèi)收外展角a2和肘關(guān)節(jié)的前屈后伸角a3決定,所以,本文只研究這3個參數(shù)變量。以上肢的舒適度為目標函數(shù)進行優(yōu)化設(shè)計,此時上肢自由度為3個。
首先研究操作力F與各個關(guān)節(jié)力矩的關(guān)系。在圖1所示的典型操作姿勢下,固定各關(guān)節(jié)角度,取操作力F為變量,得到肩關(guān)節(jié)屈伸力矩M1、肩關(guān)節(jié)展收力矩M2和肘關(guān)節(jié)屈伸力矩M4隨操縱力F的變化關(guān)系,見圖3。從圖3可見:3個關(guān)節(jié)力矩隨操縱力的變化趨勢,即首先隨著操縱力增大,3個關(guān)節(jié)力矩先不斷減少直至0 N·m;然后,隨著操縱力的增大,關(guān)節(jié)力矩反向增大。這主要是因為當操縱力很小時,關(guān)節(jié)力矩主要為支撐作用,其作用是抵消上肢重力在關(guān)節(jié)處產(chǎn)生的力矩,從而保持上肢各關(guān)節(jié)處于特定位置;當操縱力在關(guān)節(jié)處產(chǎn)生的力矩足以抵消重力力矩時,關(guān)節(jié)力矩為0 N·m,然后,隨著操縱力繼續(xù)增加,關(guān)節(jié)力矩將反向呈線性增加。
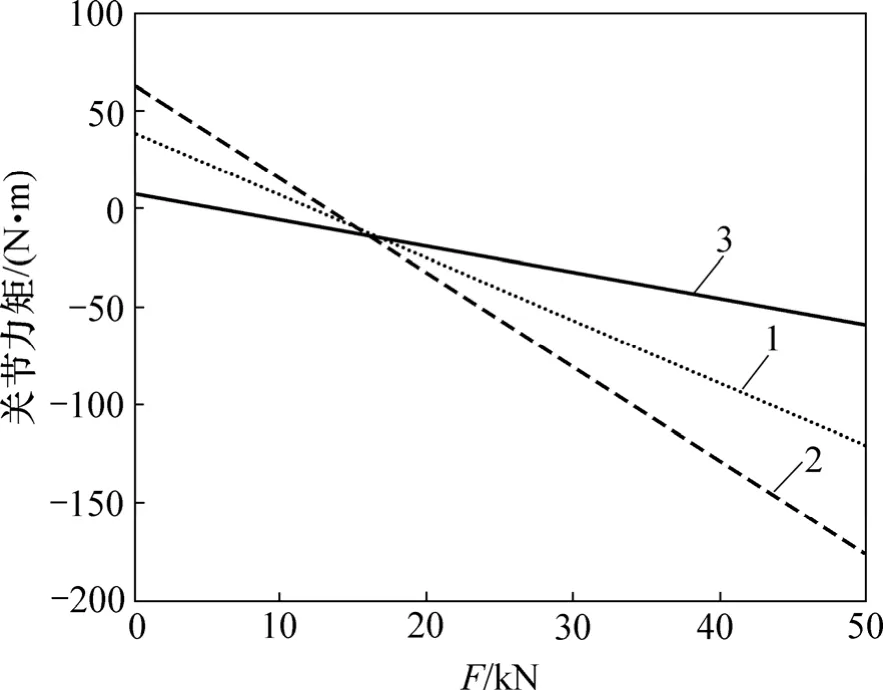
圖3 關(guān)節(jié)力矩與操作力F的關(guān)系Fig.3 Relationship between joint torque and operating force
3.3 動力學軟件SimMechanics驗證
為了證明人體上肢 Kane動力學模型結(jié)合 NASA力量模型的正確性,利用SimMechanics動力學軟件進行驗證。SimMechanics模塊是Matlab中專門用于機構(gòu)設(shè)計及其運動仿真的模塊,它利用動力學中的力和力矩等基本概念,對各種運動副連接的剛體進行建模和仿真,實現(xiàn)對系統(tǒng)進行分析和設(shè)計。人體上肢的SimMechanics模型[11?12]如圖 4 所示。
假定駕駛操作力F固定,F(xiàn)=35 N,用SimMechanics動力學軟件和Kane動力學模型這2種方法分別建立各關(guān)節(jié)舒適度隨上肢姿勢的變化情況。得到上臂屈伸,前臂屈伸和手腕屈伸三分支動作的舒適對比曲線分別如圖5~7所示。
從圖5~7可以看出:在SimMechanics動力學軟件和Kane動力學模型這2種方法下,關(guān)節(jié)舒適度的基本變化趨勢相同,但存在一定偏差。這是因為動力學軟件 SimMechanics在仿真過程中存在質(zhì)心和形狀等的簡化,由此可證明上肢的 Kane動力學結(jié)合NASA力量模型是可靠的。
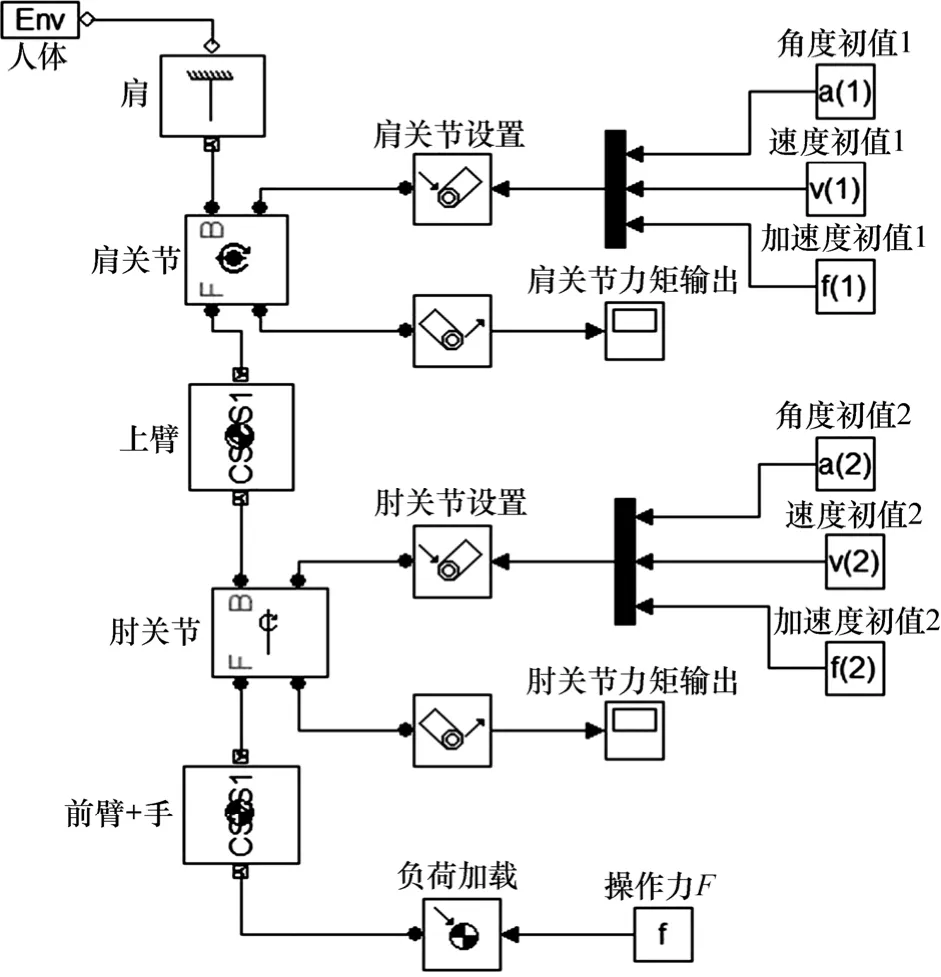
圖4 人體上肢SimMechanics模型Fig.4 SimMechanics model for upper limb
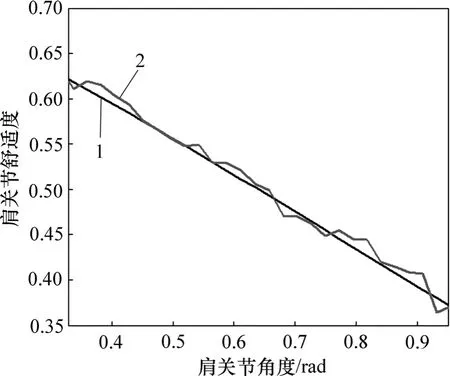
圖5 肩關(guān)節(jié)舒適度曲線Fig.5 Comfort curves for shoulder joint
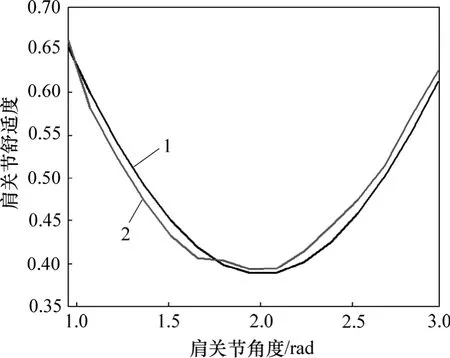
圖6 肘關(guān)節(jié)舒適度曲線Fig.6 Comfort curves for elbow joint

圖7 腕關(guān)節(jié)舒適度曲線Fig.7 Comfort curves for wrist joint
4 上肢舒適度評價與分析
在已知單個關(guān)節(jié)舒適度的情況下,整個上肢處于某個姿勢的舒適度可用下式計算:

式中:n為所評估的身體部位所包含的關(guān)節(jié)數(shù)目,本文取為關(guān)節(jié)權(quán)重,通過查表獲得。
下面考察肩關(guān)節(jié)內(nèi)收外展角、旋轉(zhuǎn)角和腕關(guān)節(jié)前屈后伸角取常值即a2=35o,a3=11o,a5=180o時,得到上肢的舒適度曲線隨著肩關(guān)節(jié)前屈后伸角a1、肘關(guān)節(jié)前屈后伸角a4的變化,如圖8所示。
從圖8可以看出:上肢舒適度隨著肩關(guān)節(jié)前屈后伸角的增大而不斷減少;隨著肘關(guān)節(jié)前屈后伸角的增大,上肢舒適度先減少然后增大。這與圖5和圖6中得到的單關(guān)節(jié)舒適度曲線變化趨勢保持一致。經(jīng)進一步分析,得到在這種情況下,傳統(tǒng)的關(guān)節(jié)舒適角度范圍[14?15]與依照本文優(yōu)化模型得出的關(guān)節(jié)角度舒適范圍對比如表2所示。
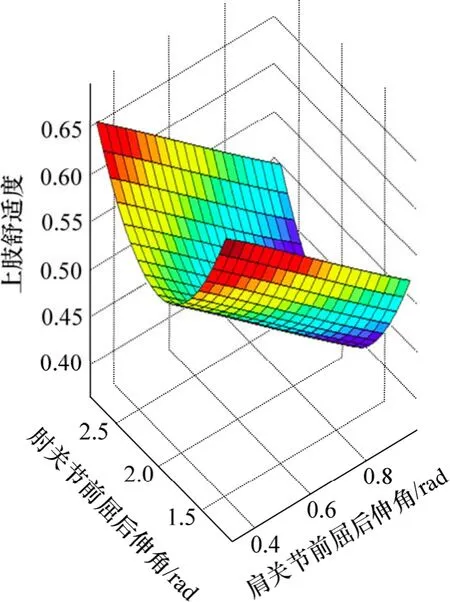
圖8 上肢舒適度變化曲線Fig.8 Comfort curves for upper limb

表2 優(yōu)化前后關(guān)節(jié)舒適角度比照Table 2 Joint comfortable angle contrast before and after optimization (°)
5 結(jié)論
(1) 構(gòu)建的 5自由度人體上肢運動模型能夠求解操縱過程中各關(guān)節(jié)力矩。
(2) 并不是傳統(tǒng)舒適角度范圍內(nèi)的所有操作都能滿足力矩舒適度要求,還應驗證此狀態(tài)下關(guān)節(jié)力矩,使它滿足一定的力矩舒適性指標。
(3) 本文獲得的舒適操作關(guān)節(jié)范圍以及上肢舒適度曲線為礦用自卸車的操縱桿布置提供了依據(jù),并可把此優(yōu)化模型應用到駕駛室其他操控部件如腳踏板、方向盤中,從而提高汽車整個操控界面的人機舒適性。
[1] Se J P, Kim C B, Chul J K, et al. Comfortable driving postures for Koreans[J]. International Journal of Industrial Ergonomics,2000, 26(4): 489?497.
[2] Porter M J, Gyi D E. Exploring the optimum posture for driver comfort[J]. International Journal of Vehicle Design, 1998, 19(3):255?266.
[3] GB 1000—88, 中國成年人人體尺寸[S].GB 10000—88, Human dimensions of Chinese adults[S].
[4] 鄭秀媛, 賈書惠, 高云峰. 現(xiàn)代運動生物力學[M]. 北京: 國防工業(yè)出版社, 2002: 363?369.ZHENG Xiuyuan, JIA Shuhui, GAO Yunfeng. Modern biologic dynamics[M]. Beijing: National Defence Industry Press, 2002:363?369.
[5] 蔡自興. 機器人[M]. 北京: 清華大學出版社, 2000: 89?126.CAI Zixing. Robotics[M]. Beijing: Tsinghua University Press,2000: 89?126.
[6] 金萬敏, 吳克堅, 姜劍虹. 機器人機械學[M]. 南京: 江蘇科學技術(shù)出版社, 1994: 339?373.JIN Wanmin, WU Kejian, JIANG Jianhong. Robot mechanics[M]. Nanjing: Phoenix Science Press, 1994: 339?373.
[7] 張國偉, 宋偉鋼. 并聯(lián)機器人動力學問題的Kane方法[J]. 系統(tǒng)仿真學報, 2004, 16(7): 1386?1391.ZHANG Guowei, SONG Weigang. A Kane formulation for the inverse dynamic of Stewart platform manipulator[J]. Acta Simulata Systematica Sinica, 2004, 16(7): 1386?1391.
[8] Kane T R, Levinson D A. Multibody dynamics[J]. J Appl Mech,1983, 50: 1071?1078.
[9] Zacher I, Bubb H. Strength based discomfort model of posture and movement[C]// Digital Human Modeling for Design and Engineering Symposium Proceedings. Rochester, Michigan,USA, Oakland University: SAE Paper 2004?01?2139.
[10] Pandya A K, Hasson S M. Correlation and prediction of dynamic human isolated joint strength from lean body mass[R].N9226682, American: National Aeronautics and Space Administration, 1992: 25?27.
[11] 董玉紅, 張立勛. 基于超越離合器和SimMechanics的合作機器人建模與仿真[J]. 哈爾濱工程大學學報, 2005, 26(5):596?602.DONG Yuhong, ZHANG Lixun. Modeling and simulation of robot based on double over-running clutches and SimMechanics[J]. Journal of Harbin Engineering University,2005, 26(5): 596?602.
[12] 任毅, 王隆基, 謝進, 等. 基于 SimMechanics的平面鉸鏈鏈四桿機構(gòu)控制系統(tǒng)計算機仿真[J]. 礦山機械, 2004, 31(8):27?29.REN Yi, WANG Longji, XIE Jin, et al. Computer simulation of planar four bar mechanism’s control system based on SimMechanics[J]. Mining Machinery, 2004, 31(8): 27?29.
[13] Kee D, Karwowski W. Ranking systems for evaluation of joint and joint motion stressfulness based on perceived discomforts[J].Applied Ergonomics, 2003, 34: 167?176.
[14] 丁玉蘭, 郭剛, 趙江紅. 人機工程學[M]. 北京: 北京理工大學出版社, 2000: 185?188.DING Yulan, GUO Gang, ZHAO Jianghong. Human-machine engineering[M]. Beijing: Beijing Institute of Technology Press,2000: 185?188.
[15] 阮寶湘, 邵祥華. 工業(yè)設(shè)計人機工程[M]. 北京: 機械工業(yè)出版社, 2005: 131?132.RUAN Baoxiang, SHAO Xianghua. Human-machine engineering for industry design[M]. Beijing: China Machine Press, 2005: 131?132.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
建材發(fā)展導向(2022年3期)2022-04-19 12:51:06
紡織科學研究(2021年9期)2021-10-14 08:52:12
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
鐵道通信信號(2020年1期)2020-09-21 08:55:16
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
成都信息工程大學學報(2018年3期)2018-08-29 01:08:52
浙江工業(yè)大學學報(2017年5期)2018-01-22 02:03:36
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
