斗輪機煤場定位的控制算法
2013-01-15 09:33:30史春玲李一紅
湖北工業(yè)大學學報 2013年2期
史春玲,李一紅
(武漢大學動力與機械學院,湖北 武漢430074)
斗輪堆取料機(簡稱斗輪機)是火力發(fā)電廠輸煤系統(tǒng)中取煤和堆煤的重要設備之一.為了使斗輪機運行效率更高,并確保煤粉混合均勻,節(jié)約資源,提高燃燒效率,在斗輪機堆煤和取煤時,必須對斗輪機進行準確定位[1].本文針對電廠輸煤斗輪堆取料機煤場的定位算法進行了研究,以期進一步提高當前斗輪堆取料機的自動化程度.
1 斗輪機的結(jié)構(gòu)
以軌道式斗輪機為例.斗輪機主要由金屬架構(gòu)、進料皮帶機(尾車部分)、懸臂皮帶機、回轉(zhuǎn)機構(gòu)、行走機構(gòu)、斗輪及斗輪裝置、俯仰液壓機構(gòu)等組成[2].
其中,進料皮帶機位于尾車上.它依靠尾車上兩組液壓缸的作用,完成俯仰動作.回轉(zhuǎn)機構(gòu)主要由支撐部分與回轉(zhuǎn)驅(qū)動裝置組成.回轉(zhuǎn)驅(qū)動裝置一般安裝在轉(zhuǎn)盤尾部或側(cè)部,安裝在減速器輸出軸上的驅(qū)動齒輪與軸承的外齒相嚙合,通過電動機的動力傳動,實現(xiàn)轉(zhuǎn)盤以上部分對于門座的回轉(zhuǎn).行走機構(gòu)是用來將斗輪機在軌道上往復運動的機構(gòu),可以進行堆、取料行走和調(diào)車行走.操作室為斗輪機的中樞,操作室與立柱相固定,由操作盤 、操作儀表、控制設備及配電屏等組成.
2 斗輪在煤場中的D-H表示法
斗輪機煤場定位系統(tǒng)由傳感器、DSP及其外圍電路等組成.斗輪機簡化成機器人手臂形式的模型后,即可建立機構(gòu)運動學方程.為描述斗輪機相鄰構(gòu)件間平移和轉(zhuǎn)動關(guān)系,可用D-H(Danevit-Hartennberg)方法.D-H方法是為每個關(guān)節(jié)處的桿件坐標系建立4×4齊次變換矩陣,表示它與前一桿件坐標系的關(guān)系.這樣逐步變換,即可用基座坐標來表示斗輪坐標.具體做法為:把構(gòu)件坐標系嵌入斗輪機的每一個連桿機構(gòu)中,用齊次變換來描述這些坐標系之間的相對位置和方向.描述一個連桿與下一個連桿之間關(guān)系的齊次變換矩陣記為An矩陣(其中n表示第n個連桿).假設斗輪機簡化模型尺寸如圖1所示[3].
連桿各參數(shù)作如下定義:轉(zhuǎn)角θn,連桿n繞關(guān)節(jié)n的Zn-1軸的轉(zhuǎn)角,右手法則;距離dn,連桿n沿關(guān)節(jié)n的Zn-1軸的位移,沿Zn-1正向為正;長度an,連桿n沿Xn方向上的長度,Xn正向一致;扭角αn,連桿n兩關(guān)節(jié)軸線之間的扭角,右手法則.
對于斗輪機基座即行走機構(gòu)來講,距離d1是其關(guān)節(jié)變量;對于回轉(zhuǎn)機構(gòu)和俯仰機構(gòu)來講,轉(zhuǎn)角θ2、θ3是其關(guān)節(jié)變量.
斗輪機各連桿坐標系建立后,n-1系與n系之間的變換關(guān)系可用坐標系的平移、旋轉(zhuǎn)來實現(xiàn).從n-1系到n系的變換步驟如下:
1)令n-1系繞Zn-1軸旋轉(zhuǎn)θ角,使Xn-1與Xn平行;
2)沿Zn-1軸平移dn,使Xn-1與Xn重合;
3)沿Xn-1軸平移an,使兩個坐標系原點重合;
4)繞Xn-1的軸旋轉(zhuǎn)αn角,使得n-1系與n系重合.

圖1 斗輪機簡化模型尺寸
用一個總的變換矩陣An來表示連桿n的齊次變換矩陣為:

這樣,第n系中的點rn在第n-1系中可表示為

由此可推出第n坐標相對于基座坐標系位置齊次變換矩陣為

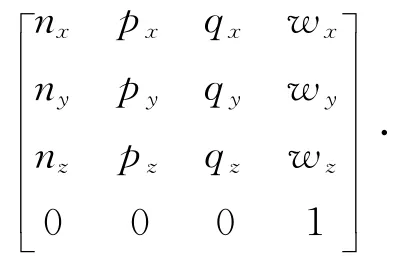
式中,[nnpnqn]是固連在第n個桿件上的第n個坐標系的姿態(tài)矩陣,Wn是由基座坐標系原點指向第n個坐標系原點的位置矢量.
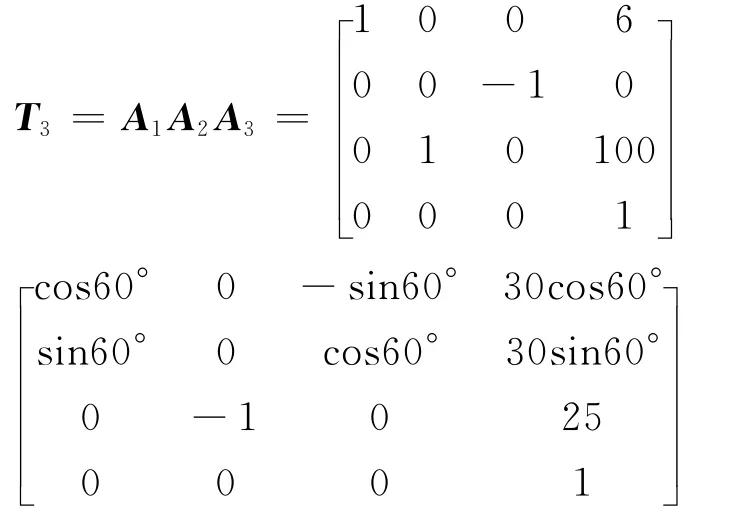
對于斗輪機而言,斗輪機斗輪相對于行走機構(gòu)的位置齊次變換矩陣為

只要求出A1、A2、A3,便可得到斗輪機斗輪相對于基座坐標系位置齊次變換矩陣.
確定斗輪的運動方程后,即可對斗輪進行準確的坐標定位.
3 算法示例
假設有一斗輪機行走輪到回轉(zhuǎn)中心距離為12 m,回轉(zhuǎn)中心軸到俯仰鉸點距離85m,俯仰鉸點到輪中心點距離6m,回轉(zhuǎn)中心至地面帶輪的距離為25m.建立圖1所示的坐標系,斗輪機初始位置在參考坐標系(X0,Y0,Z0)中為P(1000).斗輪機俯仰角度10°,接著回轉(zhuǎn)角度為60°,向前行走100m.求運動后,斗輪相對于參考坐標系的坐標.

所以位置齊次變換矩陣為
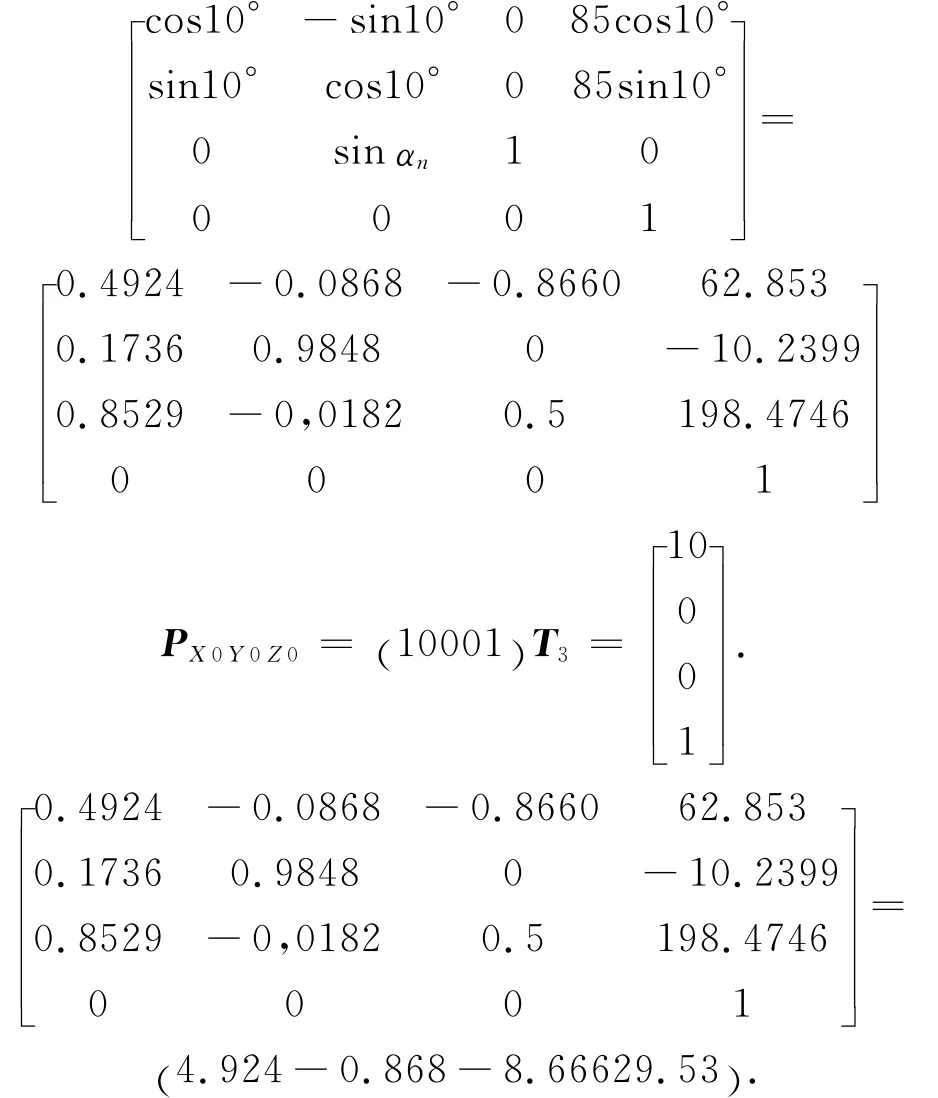
解之得 X0=4.924/629.53=0.0078,Y0=-0.868/629.53=-0.0014,Z0=-8.66/629.53=-0.0138.
綜上所述,經(jīng)過一系列的變換后,P點相對于參 考 坐 標 系 (X0,Y0,Z0) 的 坐 標 為 (0.0078,-0.0014,-0.0138).
4 結(jié)束語
電廠輸煤系統(tǒng)面積較大,電煤在煤場中的儲運是隨機的,如何實現(xiàn)斗輪機高效輸送電煤,如何在煤場中對斗輪機準確定位,以準確控制論斗輪相對煤堆的位置,進而提高輸煤效率,對保證鍋爐的正常運行,提高生產(chǎn)效率具有一定的現(xiàn)實意義.斗輪機的安全、有效運行,對電廠的正常、持續(xù)運轉(zhuǎn)起關(guān)鍵作用.
[1] 國電太原第一熱電廠.輸煤系統(tǒng)和設備[M].北京:中國電力出版社,2008:2-5.
[2] 中國動力工程學會.火力發(fā)電廠設備技術(shù)手冊第四卷火電站系統(tǒng)與輔機[M].北京:機械工業(yè)出版社,1998:5-12.
[3] 計算機輔助設計與制造[M].北京:中國水利水電出版社,2004.