基于二階滑模與定子電阻自適應的 轉(zhuǎn)子磁鏈觀測器及其無速度傳感器應用
2013-02-19 12:21:26趙力航
電工技術學報 2013年11期
黃 進 趙力航 劉 赫
(浙江大學電氣工程學院 杭州 310027)
1 引言
自20 世紀70 年代發(fā)展至今,三相異步電機矢量控制技術已趨成熟,能夠滿足大部分工業(yè)需求。而精確的轉(zhuǎn)子磁場定向和準確的轉(zhuǎn)速觀測,是保證矢量控制效果的兩個最重要的因素。
為了能通過電機外部量“觀測”電機內(nèi)部的磁通,大部分控制方案采用的是基于數(shù)學模型的間接磁場定向矢量控制。該方法的控制性能受數(shù)學模型準確性和電機參數(shù)穩(wěn)定性的影響,其中定子電阻與轉(zhuǎn)子時間常數(shù)影響最大。另一方面,轉(zhuǎn)速是非常重要的反饋量。傳統(tǒng)的機械式速度傳感器會帶來額外的成本和安裝維護方面的問題,因此無速度傳感器技術一直是電機控制領域的重要研究方向。
轉(zhuǎn)子磁鏈和轉(zhuǎn)速的觀測可以在只測得定子側(cè)電信號的前提下實現(xiàn)[1]。將定子電流、轉(zhuǎn)子磁鏈作為狀態(tài)變量寫出異步電機數(shù)學模型,在此基礎上即可構(gòu)建轉(zhuǎn)子磁鏈觀測器,并實現(xiàn)轉(zhuǎn)速辨識。根據(jù)觀測器構(gòu)建方式的不同,可以將現(xiàn)有方法分為如下幾類:基于狀態(tài)觀測器的方法,涉及人工智能的方法,以及基于模型參考自適應系統(tǒng)的方法。屬于狀態(tài)觀測器范疇的有:全階狀態(tài)觀測器[2],擴展卡爾曼濾波器[3,4],以及基于滑模理論的觀測器[5-7]。全階狀態(tài)觀測器對電機參數(shù)變化敏感,很難設計滿足全速度穩(wěn)定的反饋矩陣;擴展卡爾曼觀測器計算流程復雜,大量隨機參數(shù)要調(diào)試得到;一階滑模觀測器動態(tài)性能好,魯棒性較強,但固有的抖振會影響控制性能。涉及人工智能的方法[8]一直是本行業(yè)的研究熱點之一,只是受限于硬件性能,離實用化還有一定距離。標準模型參考自適應辨識[9-11]的物理意義明確,算法較簡單,但同樣受制于參考模型的觀測精度,需要設計電機參數(shù)辨識方法加以配合。
基于滑模變結(jié)構(gòu)理論的觀測器對系統(tǒng)數(shù)學模型精確度要求較低,而且對系統(tǒng)的參數(shù)攝動及外部擾動具有良好的魯棒性,所以能成為研究熱點。然而,基于一階滑模理論設計的觀測器總是受困于抖振問題,實踐中這一點會對系統(tǒng)穩(wěn)定性產(chǎn)生不良影響。采用二階滑模理論設計的觀測器,可以在保持魯棒性的同時削弱抖振,因此得到很多學者的關注[7]。
本文提出一種模型參考自適應理論與二階滑模Super-Twisting 理論相結(jié)合的無速度矢量控制方案。在定子電阻與轉(zhuǎn)速并行辨識的基礎上,設計了一種基于二階滑模Super-Twisting 理論的轉(zhuǎn)子磁鏈觀測器,作為速度辨識的參考模型。該觀測器充分利用了輔助滑模面,因而對轉(zhuǎn)子電阻變化具有良好的魯棒性,且反應速度優(yōu)于轉(zhuǎn)子磁鏈電壓模型。為了驗證觀測結(jié)果的準確性,文章從磁鏈幅值與相位兩個方面進行了分析。仿真與實驗結(jié)果表明,本文提出的控制方案動態(tài)性能較好,速度觀測精度較高。
2 定子側(cè)變化應對:并行定子電阻辨識
在異步電機的參數(shù)中,定、轉(zhuǎn)子電阻值變化對轉(zhuǎn)子磁場定向與轉(zhuǎn)速估計的準確性影響最嚴重。定子電阻值變化是電機低速運行時控制性能不佳的主要原因。而轉(zhuǎn)子電阻變化會在全速度范圍影響轉(zhuǎn)子磁場定向的穩(wěn)定性,并且造成轉(zhuǎn)速估計誤差。此外,傳感器的外部擾動也會影響觀測結(jié)果的穩(wěn)定性,進而降低整個無速度傳感器驅(qū)動系統(tǒng)的控制性能。
定子電阻變化的影響,主要表現(xiàn)為定子電阻壓降估計不準確,導致反電動勢計算不準確。低速運行情況下,反電動勢非常小,因此定子電阻壓降的影響相應增大。然而,定子電阻值會隨著電機溫升等因素變化,導致低速運行時速度辨識算法辨識不準,進而使整個系統(tǒng)失穩(wěn)振蕩。這里先介紹一種定子電阻與轉(zhuǎn)速并行辨識的方法,以應對定子側(cè)變化對轉(zhuǎn)子磁場定向與轉(zhuǎn)速辨識的不良影響。
2.1 基于轉(zhuǎn)子磁鏈的MRAS 速度觀測算法
根據(jù)MRAS 原理(見圖1),用電機的兩個不同結(jié)構(gòu)的數(shù)學模型估算同一個狀態(tài)量,即可由誤差設計自適應律,進而辨識轉(zhuǎn)速。選擇不同的狀態(tài)變量,可以演化出不同結(jié)構(gòu)的MRAS 辨識算法,如基于轉(zhuǎn)子磁鏈、基于反電動勢、基于瞬時無功功率等。

圖1 基于轉(zhuǎn)子磁鏈的MRAS 轉(zhuǎn)速估計原理圖 Fig.1 Block diagrams of rotor flux MRAS speed estimator
以轉(zhuǎn)子磁鏈為狀態(tài)變量,將電壓模型(1)作為參考模型,電流模型(2)作為可調(diào)模型,可設計轉(zhuǎn) 速自適應律,其中和分別表示根據(jù)電流模型和電壓模型求得的轉(zhuǎn)子磁鏈矢量。
式中 Rs——定子電阻;
Tr——轉(zhuǎn)子時間常數(shù);
Lr——轉(zhuǎn)子電感;
Lm——勵磁電感;
ωr——轉(zhuǎn)子角速度;
誤差方程寫作如下形式[9]

2.2 并行轉(zhuǎn)速與定子電阻辨識
分析式(3)可知,轉(zhuǎn)速自適應律基于轉(zhuǎn)子磁鏈的相位角度誤差構(gòu)建,而轉(zhuǎn)子磁鏈的幅值自由度未被使用。根據(jù)文獻[9],基于轉(zhuǎn)子磁鏈的幅值誤差設計定子電阻自適應律,可實現(xiàn)轉(zhuǎn)速與定子電阻的并行辨識。
在式(1)和式(2)基礎上分別構(gòu)造觀測器,其中轉(zhuǎn)速和定子電阻作為變量考慮。
基于轉(zhuǎn)子磁鏈的相位角誤差,構(gòu)建轉(zhuǎn)速自適應律,如下式表述:

相應的,基于轉(zhuǎn)子磁鏈的幅值誤差,構(gòu)建定子電阻自適應律如下:

3 基于Super-Twisting 的轉(zhuǎn)子磁鏈觀測器
定子電阻只對低速運行影響較大,而轉(zhuǎn)子側(cè)參數(shù)的變化在全速度范圍內(nèi)都會影響控制性能。應用在永磁電機上的MRAS,通常用電機本體作為參考模型,因而能保證參考模型的準確性。前述的基于轉(zhuǎn)子磁鏈的MRAS 速度辨識算法,采用轉(zhuǎn)子磁鏈的電壓模型作為參考模型,那么該模型觀測磁鏈的準確性會直接影響最終參數(shù)辨識的結(jié)果。
為了得到一種更好的參考模型,本文設計了一種基于二階滑模理論的轉(zhuǎn)子磁鏈觀測器。該觀測器對轉(zhuǎn)子側(cè)的電阻變化以及擾動具有魯棒性,且反應速度優(yōu)于轉(zhuǎn)子磁鏈電壓模型。
3.1 Super-Twisting 理論
Super-Twisting 理論是滑模控制理論研究的又一成果。對于以下系統(tǒng)
基于Super-Twisting 理論,可以構(gòu)建觀測器如下[6]:
式中,ξ 是足夠小的正數(shù);λ1~λn是主滑模面的滑模增益;δ1~ δn是輔助滑模面的滑模增益;

當只有兩個狀態(tài)變量時,基于 Super-Twisting理論的觀測器最簡形式可以寫成[12]

式中,λ 和δ 是滑模增益;ρ1和ρ2表示擾動。
文獻[12]中基于李雅普諾夫穩(wěn)定性理論,對該算法的穩(wěn)定性給出了嚴格證明[12]。對于擾動

選取合適的λ 和δ,能使觀測器的觀測結(jié)果對有界擾動ρ2具有魯棒性。
3.2 基于Super-Twisting 理論的磁鏈觀測器設計
選取定子電流與轉(zhuǎn)子磁鏈作為狀態(tài)變量,異步電機模型可以寫為如下形式:

為了便于構(gòu)建基于Super-Twisting 理論的觀測器,作如下變換:

式中,z1~z4為中間變量。
在式(11)中應用上述變換可得

先不考慮擾動和參數(shù)變化,并將γ 和ξ 視為確定的常數(shù),則可根據(jù)式(10)的結(jié)構(gòu),構(gòu)建基于二階滑模理論的轉(zhuǎn)子磁鏈觀測器
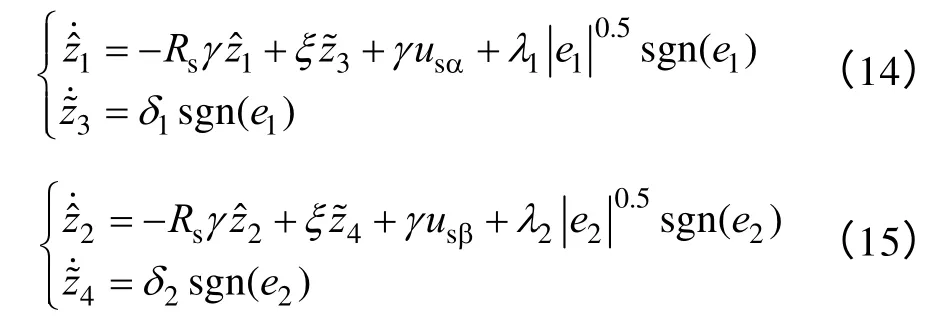
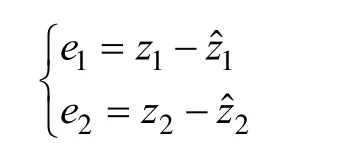
e1和e2為誤差值,分別定義為
3.3 擾動影響分析
考慮擾動,用ρα1和ρα2表示,將α 軸的觀測器表達式重寫為

轉(zhuǎn)子側(cè)參數(shù)變化和擾動帶來的影響可以被折算到ρα2中,相應的,定子側(cè)參數(shù)變化和擾動被折算到ρα1內(nèi)。根據(jù)Super-Twisting 算法,對于擾動

選取合適的λ 和δ,能使觀測器的觀測結(jié)果對有界擾動ρα2具有魯棒性。這里的ρα2不僅僅包含轉(zhuǎn)子電阻參數(shù)擾動,它可以擴展為有界的無序擾動。
需要指出的是,該觀測器對定子側(cè)的擾動ρα1無效。由于前述并行定子電阻自適應的存在,定子電阻的變化會被自適應機構(gòu)實時跟蹤。此外,定子電流傳感器可能存在的零漂以及低速時影響較大的死區(qū)效應,也會被定子電阻自適應機構(gòu)所補償,使得轉(zhuǎn)子磁鏈觀測器的表達式更接近實際系統(tǒng),因而誤差更小。
3.4 二階滑模轉(zhuǎn)子磁鏈觀測器的實現(xiàn)

根據(jù)式(17)計算轉(zhuǎn)子磁鏈,要經(jīng)過一道純積分環(huán)節(jié),這在實驗中出現(xiàn)直流偏置的問題。為此,用一階低通濾波器代替純積分環(huán)節(jié),并對幅值和相位進行補償[14]。采用轉(zhuǎn)差頻率法控制電機,取合適的補償系數(shù)K,可由同步角速度ω1,實時計算低通濾波器的截止頻率ωc(單位rad/s)。
滑模觀測器普遍存在抖振問題,這是由實現(xiàn)滑模運動所必須的開關函數(shù)決定的。為了削弱抖振,常引入新的開關方式,以替代傳統(tǒng)符號函數(shù),如飽和函數(shù)和sigmoid 函數(shù)。應用替代函數(shù)要指定一個合適的邊界層。邊界層太厚會導致系統(tǒng)響應時間過長,太薄則優(yōu)化效果不明顯,抖振依舊很大。
與傳統(tǒng)的一階滑模相比,本文使用的二階滑模方法由于輔助滑模面積分的存在,能夠有效減少抖振[6]。在此基礎上,本文應用開關函數(shù)優(yōu)化領域的研究成果,所有采用符號函數(shù)sgn() 的場合,用飽和函數(shù)sat() 替代[13]。飽和函數(shù)的定義如下:
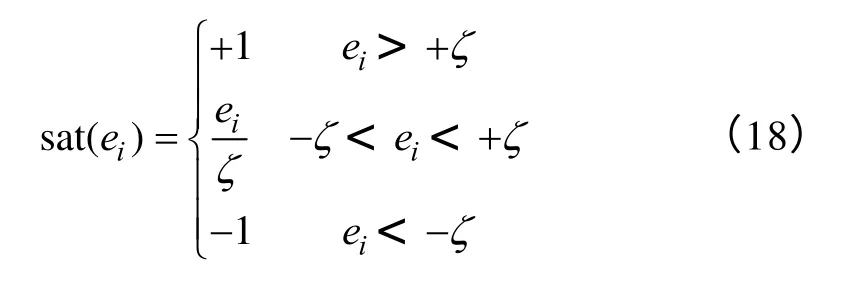
式中,ξ 為邊界層常數(shù),是合適的正數(shù)。
圖2 給出基于Super-Twisting 理論的轉(zhuǎn)子磁鏈觀測器基本結(jié)構(gòu)。
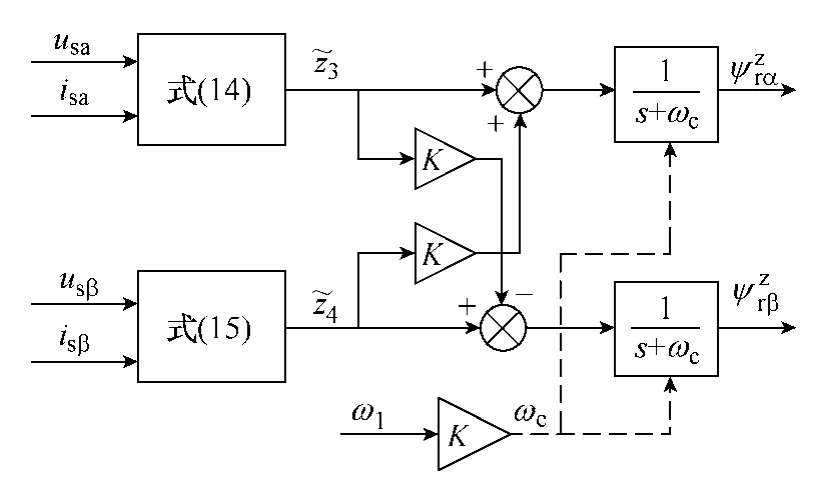
圖2 基于ST 算法的轉(zhuǎn)子磁鏈觀測器結(jié)構(gòu)圖 Fig.2 Block diagrams of rotor flux observer based on super-twisting theory
結(jié)合定子電阻辨識模塊,最終得到總體實驗方案如圖3 所示。

圖3 總體實驗方案的結(jié)構(gòu)框圖 Fig.3 Block diagrams of the proposed scheme
4 仿真建模分析
首先通過Simulink 建模仿真,驗證本文方法的有效性。根據(jù)圖4 建立間接矢量控制無速度傳感器異步電機驅(qū)動系統(tǒng)的仿真模型。

圖4 系統(tǒng)結(jié)構(gòu)圖 Fig.4 Block diagrams of the whole system

圖5 啟用Rs 辨識的低速(10r/min)運行 (t=1s 時切換Rs 的值) Fig.5 Low-speed operation (10r/min) with stator resistance identification (Rs changes at t=1s)
圖5 是電機以10r/min 的低速運行時,定子電阻在1s 時由1.6Ω 迅速切換至2.4Ω,記錄下的估計 轉(zhuǎn)速、實際轉(zhuǎn)速,以及給定Rs、辨識Rs波形。由圖可見,Rs自適應能與轉(zhuǎn)速自適應較好地并行運行,當Rs給定值變化時,Rs自適應辨識較迅速地跟上了變化,因而消去了轉(zhuǎn)速的誤差,使系統(tǒng)在低速下能穩(wěn)定運行。
轉(zhuǎn)子磁鏈電壓模型中不含轉(zhuǎn)子電阻,因而對轉(zhuǎn)子電阻變化不敏感。為了驗證本文方案對轉(zhuǎn)子電阻變化的魯棒性,在中高速變化運行時,改變轉(zhuǎn)子電阻阻值進行速度辨識。如圖6 所示,1.8s 時電機設定轉(zhuǎn)速由150r/min 變?yōu)?00r/min,2.4s 時設定轉(zhuǎn)速由600r/min 變?yōu)? 000r/min。自2.0s 開始,0.2s 后轉(zhuǎn)子電阻設定值由1.3Ω 迅速切換至1.7Ω。對比觀測和實際轉(zhuǎn)速可以發(fā)現(xiàn),轉(zhuǎn)子電阻的變化對本文方案的轉(zhuǎn)速辨識結(jié)果也無影響。

圖6 轉(zhuǎn)子電阻設定變化時的無速度傳感器矢量控制運行結(jié)果(150r/min→600r/min→1000r/min) Fig.6 Speed sensorless control operation with rotor resistance variation (150r/min→600r/min→1000r/min)
接下來驗證二階滑模觀測器的快速性。圖 7a是轉(zhuǎn)速給定變化時,普通電壓模型轉(zhuǎn)子磁鏈的觀測結(jié)果,而圖7b 是同樣條件下二階滑模觀測器的觀測結(jié)果。通過比較可以得出結(jié)論,二階滑模觀測器與電壓模型觀測器相比,跟蹤速度更快,磁鏈觀測結(jié)果更平滑。


圖7 兩種不同方式在電機加速過程中的 磁鏈觀測結(jié)果對比 Fig.7 Comparison of two methods of rotor flux observation at an acceleration process
5 實驗研究
本文的實驗對象為一臺 15kW 的三相異步電機,具體參數(shù)參見下表。在一套變頻器上實現(xiàn)對異步電機的無速度傳感器矢量控制,實驗平臺如圖8所示。在電機軸上裝一個光電編碼器,以取得實時轉(zhuǎn)速數(shù)據(jù),作為轉(zhuǎn)速辨識的評判基準。同軸還加裝一個轉(zhuǎn)矩傳感器,用于轉(zhuǎn)子磁鏈的幅值驗證,具體方法下文詳述。

表 異步電機參數(shù) Tab. Parameters of the IM

圖8 實驗平臺實物圖 Fig.8 Experimental setup
5.1 轉(zhuǎn)子磁鏈準確性驗證
與轉(zhuǎn)速不同,轉(zhuǎn)子磁鏈很難通過安裝傳感器來直接測得,因而不容易直觀地驗證磁鏈觀測結(jié)果的準確性。轉(zhuǎn)子磁鏈包含幅值與相位兩部分信息,需要設計實驗,分別驗證。
文獻[15]為證明其轉(zhuǎn)子時間常數(shù)辨識的準確性,采用給定iq電流分量為方波,觀測轉(zhuǎn)速波形方法。該法可以廣泛地被用于驗證轉(zhuǎn)子磁場定向的準確性,當轉(zhuǎn)子磁場定向準確時,定子電流dq 分量之間解耦,因而控制電流id分量不變,iq分量與轉(zhuǎn)矩成正比。給定電流iq分量為方波,磁場定向越準確,那么在方波轉(zhuǎn)矩的作用下,轉(zhuǎn)速波形越接近真正的三角波。如圖9a 所示,實測的轉(zhuǎn)速波形呈現(xiàn)較好地三角波,說明觀測結(jié)果的相位較為準確。
磁鏈幅值觀測在直接轉(zhuǎn)矩控制中非常重要。當磁場定向準確時,恒幅值變換后磁鏈幅值ψr與轉(zhuǎn)矩Te存在如下關系:

與電機同軸安裝一臺轉(zhuǎn)矩傳感器,將轉(zhuǎn)矩實測波形與式(19)的轉(zhuǎn)矩觀測波形對比,如圖9b 所示。圖中實測轉(zhuǎn)矩波形在轉(zhuǎn)矩給定發(fā)生跳變時出現(xiàn)超調(diào)與振蕩,這是因為電機聯(lián)軸器處的橡膠圈已經(jīng)老化,單靠墊片無法壓緊,當轉(zhuǎn)矩突變時電機與負載會有瞬間錯位。系統(tǒng)穩(wěn)態(tài)時實測波形與觀測波形重合,說明轉(zhuǎn)子磁鏈觀測結(jié)果的幅值較為準確。

圖9 轉(zhuǎn)子磁鏈準確性驗證 Fig.9 Accuracy verification of rotor flux
5.2 系統(tǒng)低速運行分析
為了驗證定子電阻并行辨識的有效性,在電機的定子三相各串聯(lián)一只0.5Ω/250W 的功率電阻,通過一個并聯(lián)空氣開關投切。為了模擬定子電阻的漸變,在每只功率電阻上再并聯(lián)一臺0~17Ω/3.5A 的滑動變阻器,具體接法如圖10 所示。因而,定子每相電阻能可控地變化0.5Ω。實驗在10r/min 的低速狀況下進行。
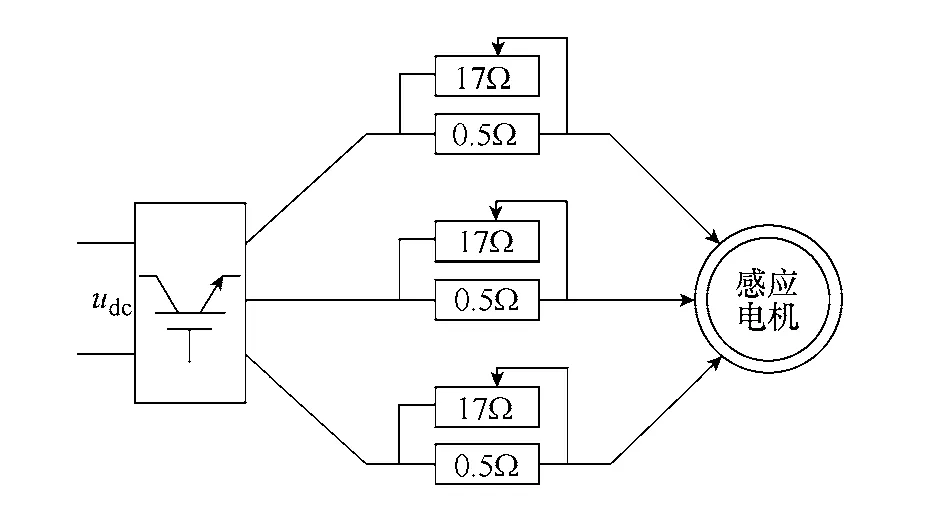
圖10 定子電阻漸變模擬 Fig.10 A circuit for variable Rs identification verification
圖11 為啟用Rs辨識之后記錄的系統(tǒng)運行結(jié)果。由圖中可見,人為加入的定子電阻阻值變化,會被并行Rs自適應方法有效辨識,因而保證了轉(zhuǎn)速辨識的準確性,使系統(tǒng)能以低速穩(wěn)定運行。

圖11 啟用Rs 辨識的低速運行(10r/min) Fig.11 Low-speed operation with stator resistance identification (10r/min)
5.3 中高速性能分析
圖12 記錄了電機由150r/min 到600r/min 的加速過程中,定子電流 α 分量、轉(zhuǎn)子磁鏈以及轉(zhuǎn)速的波形變化。加速過程中,轉(zhuǎn)子側(cè)電磁情況處于瞬態(tài),而觀測得到的定子電流和轉(zhuǎn)子磁鏈波形變化較為平穩(wěn)。轉(zhuǎn)子磁鏈觀測的快速性、平滑性,保證了轉(zhuǎn)速估計的穩(wěn)定性和準確性。整個加速過程中,電機在無速度傳感器矢量控制方案下,轉(zhuǎn)速誤差較小,系統(tǒng)運行穩(wěn)定。

圖12 加速過程中的電流、磁鏈與轉(zhuǎn)速觀測 Fig.12 Currents,rotor flux and speed waveforms recorded at an acceleration process
6 結(jié)論
本文結(jié)合模型參考自適應理論與二階滑模的Super-Twisting 理論,提出一種轉(zhuǎn)子磁鏈觀測和轉(zhuǎn)速辨識方案,用于異步電機矢量控制。通過原理分析與實驗研究得到如下結(jié)論:
(1)由于采用了并行定子電阻辨識的方法,本方案能使系統(tǒng)穩(wěn)定運行在0.5Hz 的低速狀態(tài)下。
(2)本文提出的二階滑模轉(zhuǎn)子磁鏈觀測器,對轉(zhuǎn)子參數(shù)變化具有魯棒性,而且相比基于電壓模型的傳統(tǒng)觀測器,反應速度更快。
(3)用本文提出的方案,實現(xiàn)一臺15kW 異步電機的無速度傳感器矢量控制運行,實驗證明該方案磁鏈觀測的幅值、相位均比較準確,整個系統(tǒng)運行穩(wěn)定,控制效果較好。
[1] Vaclavek P,Blaha P,Herman I.AC drive observability analysis[J].IEEE Transactions on Industrial Electronics,2013,60(8):3047-3059.
[2] Zaky M S.Stability analysis of speed and stator resistance estimators for sensorless induction motor drives[J].IEEE Transactions on Industrial Electronics,2012,59(2):858-870.
[3] Barut M,Bogosyan S,Gokasan M.Speed-sensorless estimation for induction motors using extended Kalman filters[J].IEEE Transactions on Industrial Electronics,2007,54(1):272-280.
[4] 尹忠剛,趙昌,鐘彥儒,等.采用抗差擴展卡爾曼濾波器的感應電機轉(zhuǎn)速估計方法[J].中國電機工程學報,2012,32(18):152-159.
Yin Zhonggang,Zhao Chang,Zhong Yanru,et al.A speed estimation method of induction motors using the robust extended Kalman filter[J].Proceedings of the CSEE,2012,32(18):152-159.
[5] Zaky M S,Khater M M,Shokralla S S,et al.Wide-speed-range estimation with online parameter identification schemes of sensorless induction motor drives[J].IEEE Transactions on Industrial Electronics,2009,56(5):1699-1707.
[6] Solvar S,Le V,Ghanes M,et al.Sensorless second order sliding mode observer for induction motor[C].IEEE International Conference on Control Applica- tions,Yokohama,Japan,2010:1933-1938.
[7] 張勇軍,孫寅飛,王京.基于單維離散滑模的模型參考自適應轉(zhuǎn)速辨識方法[J].電工技術學報,2012,27(4):54-58.
Zhang Yongjun,Sun Yinfei,Wang Jing.A speed estimation algorithm based on single-manifold discrete time sliding mode model reference adaptive system[J].Transactions of China Electrotechnical Society,2012,27(4):54-58.
[8] 王耀南,陳維.無速度傳感器的感應電機神經(jīng)網(wǎng)絡魯棒自適應控制[J].中國電機工程學報,2008,28(33):92-98.
Wang Yaonan,Chen Wei.Speed sensorless neural network robust adaptive control for induction motors[J].Proceedings of the CSEE,2008,28(33):92-98.
[9] Vasic V,Vukosavic S N,Levi Emil.A stator resistance estimation scheme for speed sensorless rotor flux oriented induction motor drives[J].IEEE Transactions on Energy Conversion,2003,18(4):476-483.
[10] Jevremovic V R,Vasic V,Marcetic D P,et al.Speed-sensorless control of induction motor based on reactive power with rotor time constant identifica- tion[J].IET Electric Power Applications,2010,4(6):462-473.
[11] 尹忠剛,劉靜,鐘彥儒,等.基于雙參數(shù)模型參考自適應的感應電機無速度傳感器矢量控制低速性能[J].電工技術學報,2012,27(7):124-130.
Yin Zhonggang,Liu Jing,Zhong Yanru,et al.Low-speed performance for induction motor sensorless vector control based on two-parameter model reference adaptation[J].Transactions of China Electrotechnical Society,2012,27(7):124-130.
[12] Moreno J A,Osorio M.Strict Lyapunov functions for the super-twisting algorithm[J].IEEE Transactions on Automatic Control,2012,57(4):1035-1040.
[13] 程帥,姜海博,黃進,等.基于滑模觀測器的單繞組多相無軸承電機無位置傳感器控制[J].電工技術學報,2012,27(7):71-77.
Cheng Shuai,Jiang Haibo,Huang Jin,et al.Position sensorless control based on sliding mode observer for multiphase bearingless motor with single set of windings[J].Transactions of China Electrotechnical Society,2012,27(7):71-77.
[14] 何志明,廖勇,向大為.定子磁鏈觀測器低通濾波器的改進[J].中國電機工程學報,2008,28(18):61-65.
He Zhiming,Liao Yong,Xiang Dawei.Improvement of low-pass filter algorithm for stator flux estimator[J].Proceedings of the CSEE,2008,28(18):61-65.
[15] Riveros J A,Yepes A G,Barrero F,et al.Parameter identification of multiphase induction machines with distributed windings—part 2:time-domain techniques[J].IEEE Transactions on Energy Conversion,2012,27(4):1067-1077.
