體部伽馬刀放療中精確靶位控制系統的仿真設計
2013-03-18 02:48:18張建華黑靈巧王明霞魏迎軍
鄭州大學學報(工學版) 2013年3期
張建華,余 輝,黑靈巧,王明霞,魏迎軍
(1.鄭州大學 電氣工程學院,河南 鄭州450001;2.鄭州人民醫院 設備科,河南 鄭州450003;3.黃淮學院電子科學與工程系,河南 駐馬店463000)
0 引言
我國是腫瘤發病率較高的國家之一[1]. 目前治療手段首選手術切除,但該方法存在患者痛苦、價格高、風險大等問題;而放射治療腫瘤費用低、風險小、療效顯著,因此放射治療逐漸成為治療腫瘤的首選方法.采用放射法治療腫瘤的原則是最大限度提高病變組織的射線受量和減少正常組織射線受量,因此精確放療意義重大[2]. 在體部腫瘤的放療中,尤其是在胸、肺、上腹部的放療中,由于呼吸運動造成的靶位最大位移達到20 mm 左右[3],導致在放療的過程中腫瘤周圍的正常組織受到與計劃受量有明顯差別的輻射,從而增加了正常組織并發癥的概率.因此,設計一種能減少伽馬刀放療對患者正常組織損害的系統依然是伽馬刀放療領域的研究熱點.
1 設計方案
為了實現腫瘤放療的“三精”問題,本設計系統框架如圖1 所示. 由圖1 可知,步進電機的控制、靶點位移模型的建立、患者呼吸信號的采集是伽馬刀擺位床研究的關鍵. 患者在治療時的呼吸信號被壓電傳感器采集后,輸送給單片機系統,此時單片機會控制3 個步進電機做相應的轉動,從而帶動擺位床按呼吸規律的逆向進行運動,以降低呼吸對放療精度的影響.
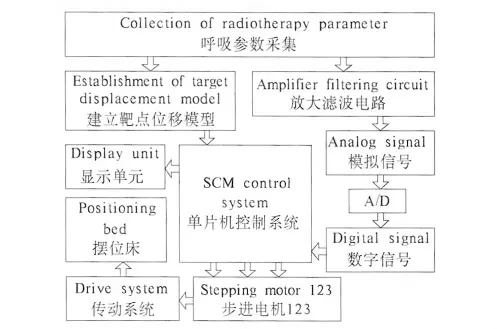
圖1 智能擺位床系統的設計框圖Fig.1 The design diagram of intelligent positioning bed system
1.1 硬件系統
本設計采用絲桿為滾珠螺桿(直徑D =20 mm,長度L=1 m);Z1和Z2為兩個傳動齒輪,直徑分別為d1=20 mm,d2=100 mm,寬度均為w =20 mm,摩擦系數取為μ=0.2;取病人與擺位床的重量P=120 kg;在x、y、z 3 個方向上受力Fx=1 176 N,Fy=Fz=235 N;通過計算得出負載轉矩T =2.4 N·m,滾珠螺桿轉動慣量I0=0.012 kg·m2,Z1和Z2的轉動慣量分別為I1=0.031 kg·m2,I2=0.002 kg·m2,傳動比I21=2,步進電機起動轉矩Tm=8.6 N·m,考慮到其他外部因素的影響將Tm乘上一系數,在這里取a =1.5,得到步進電機起動轉矩Tma=12.9 N·m.根據設計需要的速度和Tma查找步進電機選型手冊,選出了SM 150 -180 -20 LFB 型號步進電機;根據步進電機的額定電流和設計的精度要求選取SA3L15C 型號的驅動器.
腫瘤運動是一個三維運動過程[4],在硬件設計中就需要將其分成三個方向的運動,并用三個步進電機分別控制. 單片機控制步進電機系統框圖如圖2 所示.
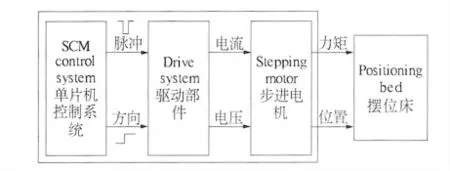
圖2 單片機控制步進電機系統框圖Fig.2 The block diagram of stepping motor system controlled by single chip microcomputer
SM 150 -180 -20 LFB 型號步進電機是一種將電脈沖轉化為角位移的執行機構,當步進驅動器每接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動1.8°. 工作時,通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的.為了提高擺位床運動的精確度,讓驅動器工作在4 細分狀態下,這時,步進電機每接收一個脈沖信號就會按設定的方向轉動0.45°,再通過滾珠螺桿將步進電機的運動轉化成直線運動,從而帶動擺位床運動,降低呼吸對放療精度的影響.
1.2 軟件系統
本設計采用C 語言進行編程,在windows7 環境下利用編程軟件Keil uVision3 進行編寫. 軟件的主要功能是控制步進電機的啟動、運轉方向、運行速度的變化等.
2 靶點位移模型的建立
根據伽瑪刀放射治療腫瘤的治療要求,筆者利用CT 掃描和實時成像技術[5]獲取腫瘤隨著周期性呼吸運動而改變位置的橫斷面圖像,使用插值算法重建實際的圖像序列. 重建的序列可以反映出腫瘤在不同呼吸周期中的變化規律,從而得到腫瘤的偏移數據. 采用壓電傳感器得出患者的呼吸信號曲線.由于腫瘤的移動與呼吸同時進行,且周期相同,所以可以將兩者通過時間建立起對應的關系,最后通過采集患者的呼吸信號來確定腫瘤的位移數據. 由于該患者的呼吸周期約為4.4 s,從所得數據中選取一個呼吸周期內腫瘤的44 組偏移數據.為了更加直觀地檢驗本實驗所選取的44 組偏移數據的質量,44 組偏移數據分別在x、y、z 軸的顯示如圖3 所示,由該圖可以看出:所選取的數據能夠很好地反映出腫瘤的偏移信息.
根據本設計對精確度的要求,分別采用粒子群算法(PSO)、標準差分進化算法(DE)、準牛頓算法(BFGS)和遺傳算法(GA)對該實驗數據進行處理,通過比較4 種算法的擬合程度及綜合評估,最終選擇擬合程度高、算法運行時間短的準牛頓算法,4 種算法的相關因素比較見表1.

圖3 44 組腫瘤偏移數據分別在x、y、z 方向上的顯示Fig.3 The visual display of the 44 groups of offset datas at x、y、z directions
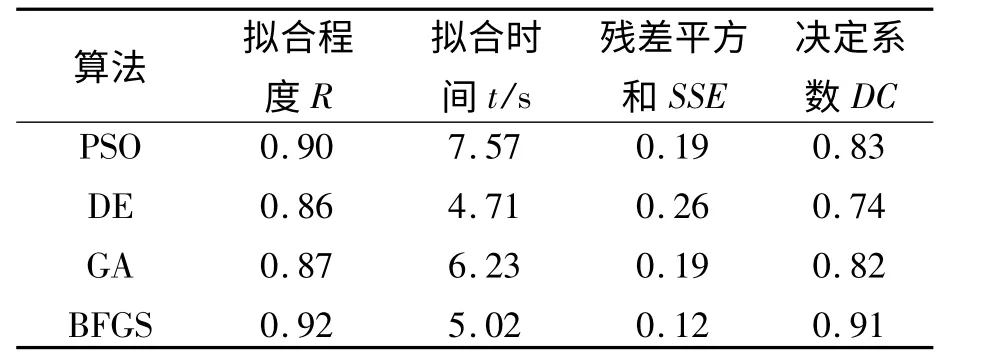
表1 4 種算法相關因素比較表Tab.1 The relevant factors comparison table of four algorithms
通過表1 可以看出:BFGS 的R、SSE、DC 均是4 種算法當中最好的,利用BFGS 算法得到的優化模型為
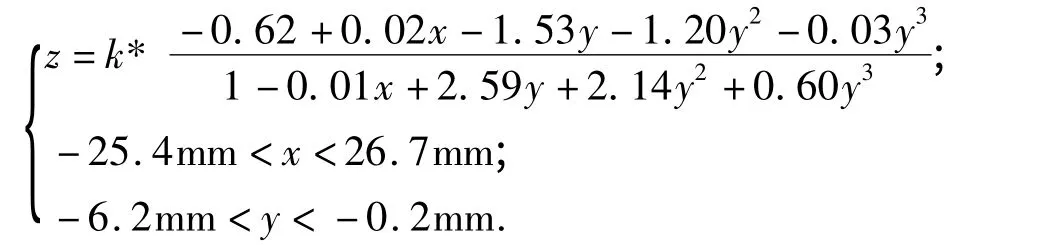
將該實驗數據中的x 和y 代入上式,經過Matlab7.0 進行編程,得出z 的計算值,將z 計算值與實際z 值對比如圖4 所示.由該圖可看出,該模型具有很好的擬合性.
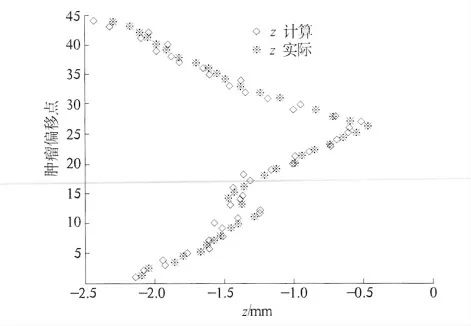
圖4 BFGS 模型得出z 計算與實際z 值對圖Fig.4 The comparison chart of z value obtained by BFGS model and actual z value
由于患者個體的差異性,每個患者所對應的優化模型就會有一定的差異.模型中k 為權重,不同的患者有不同的k 值.影響k 值的因素包括身高、體重、肺活量、性別、年齡等因素,導致的最終結果是腫瘤偏移數據的不同.通過更改程序中腫瘤的偏移數據,不同患者的優化模型就能很容易得到.
3 結果與討論
使用該控制方法后,再次通過CT 掃描和實時成像技術,獲得腫瘤隨著周期性呼吸運動而改變位置的橫斷面圖像,使用插值算法重建實際的圖像序列.重建的序列可以反映出腫瘤在不同呼吸周期中的二維變化規律,從而得出使用控制方法后腫瘤的偏移數據(x 方向). 通過Matlab7. 0將使用控制方法前x 方向腫瘤位移數據和使用控制方法后測得x 方向腫瘤位移數據進行對比分析,如圖5 所示.
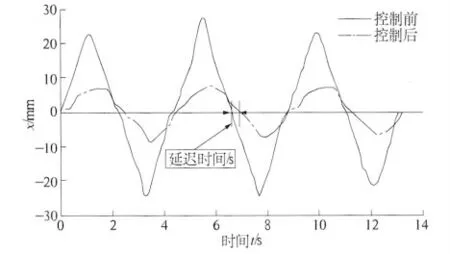
圖5 x 方向腫瘤位移波形在使用控制方法前后的對比圖Fig.5 Contrast diagram of tumor displacement waveform in x-axis before and after control method
圖5 反映出了3 個呼吸周期中使用控制系統前、后腫瘤偏離的位移波形.實線為未使用該控制方法前腫瘤偏離的位移波形,點畫線為使用了該控制系統后腫瘤偏離靶點的位移波形. 通過對比可以看出,使用該控制系統能夠減少呼吸運動造成的腫瘤偏移幅度.從圖5 可以看出,該系統具有一定的延遲性,分析原因主要有以下3 個方面:①單片機程序運行造成的延遲時間;②步進電機的釋放信號、驅動的控制信號、方向的控制信號都需要一定的延遲時間才能有效,也造成了延遲時間;③實驗時人為導致的各種誤差等.同時,使用相同的方法得出y、z 方向和x 方向具有類似的結論.
4 結論
使用擺位床控制系統,能夠有效地減小放療時呼吸導致的腫瘤偏移幅度,這對減少腫瘤周圍正常組織受照劑量,減少患者的并發癥起到很重要的作用.但是,由于單片機系統和步進電機驅動系統都具有一定的延遲性,擺位床的運動必然會滯后于呼吸運動;用壓電傳感器檢測到的患者呼吸信號并不與體內的腫瘤運動有相同的運動規律[6];腫瘤位移數據的采集也沒有一個統一認可的方法,國內外不同學者運用不同的方法得到的腫瘤位移存在差異[7].因此,如何解決以上問題依然是國內外專家研究的熱點和提高腫瘤放療精度的關鍵.
[1] 鄭榮壽,張思維,吳良有,等. 中國腫瘤登記地區2008 年惡性腫瘤發病和死亡分析[J]. 中國腫瘤,2012,21(1):1 -12.
[2] 任金山.淺談中醫與西醫放射結合治療腫瘤的優勢與療效[J].中醫臨床研究,2011,3(6):115 -116.
[3] 伍銳,陳超敏. 呼吸控制技術在肺部腫瘤精確放射治療中的應用[J]. 生物醫學工程研究,2009,28(2):159 -162.
[4] 趙軍,陳健龍,張茂,等.顱內動脈瘤介入診療中三維旋轉造影成像技術分析[J]. 中國老年學雜志,2012,32(2):241 -243.
[5] 張明鑫,王健生. 腫瘤動物模型影像學研究進展[J].中國現代普通外科進展,2007,10(6):520-523.
[6] DANIEL A,PARAG J,WEI L,et al. Novel breathing motion model for radiotherapy[J].Int J Radiat Oncol Biol Phys,2005,63:921 -929.
[7] 胡永果.探索中央型肺癌腫塊位移的影響因素及其數學模型的建立[D]. 蘭州:蘭州大學第一醫院,2010.
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25