海陸垂直基準轉換與地形數據集成應用研究
2013-03-20 01:29:48邢喆奚歌樊妙李鵬李四海
海洋通報 2013年1期
關鍵詞:數據處理
邢喆,奚歌,樊妙,李鵬,李四海
(國家海洋信息中心,天津 300171)
隨著我國經濟迅速發展,陸地不可再生資源的日益枯竭,海洋開發戰略已成為我國經濟可持續發展的重要因素。由國家海洋局承擔的“我國近海海洋綜合調查與評價”專項突出了海洋開發戰略的主題,“數字海洋”作為其中的重要組成部分,得到專項的足夠重視。構建“數字海洋”首先需要建立地理空間數據框架,其核心是在陸海垂直基準統一基礎上,實現陸海地形數據的無縫集成。
通過本次專項調查獲取了大量我國海島海岸帶區域航空LIDAR 數據和近海海底多波束/單波束水深數據,然兩者高程基準并不統一,專項獲取的航空LIDAR 數據以大地高作為高程基準,水深資料則采用深度基準。以上兩種基準面作為海陸高程/水深的起算面,不可避免存在陸地高程和海洋深度數據不能有效銜接的缺陷,故亟待構建航空LIDAR 數據和水深數據間的轉換關系,將其歸算到統一的高程基準下,為“數字海洋”基礎框架構建提供可靠的數據支撐。
1 數據處理
1.1 機載LIDAR 數據
機載LIDAR 是一種安裝在飛機上的激光探測和測距系統,無需任何或僅需少量地面控制點,獲得高精度、高密度的三維坐標數據,可用來構建目標物的三維立體模型(張玉方等,2008)。LIDAR系統具有自動化程度高、受天氣影響小、數據生產周期短等特點,為獲取高分辨率地球空間信息,提供了一種全新的技術手段。LIDAR 數據的處理包括航跡重構、激光掃描測量數據處理、“點云”數據處理以及DEM 構建等過程,流程如圖1 所示。
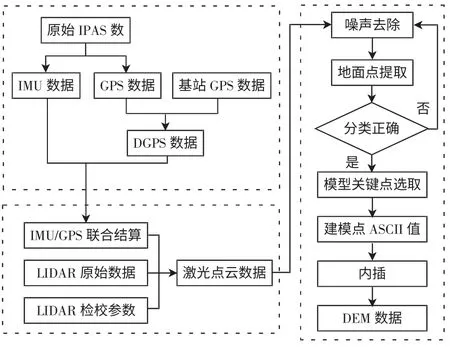
圖1 LIDAR 數據處理流程
1.2 海底地形資料
自單波束和多波束海底聲吶探測技術被廣泛應用以來,獲取全面、精細的海底水深數據變得切實可行。數據采集階段結束以后,原始數據首先經導航信號編輯、噪聲編輯、吃水改正、聲速改正、潮位改正等前期的數據處理過程,獲得大量水深離散點,再用有一定結構關系的網格點代替離散點,通過數值插值方法對標準化的海底水深離散數據進行內插網格化處理,從而構建生成海底DEM,進行各種應用。數據處理流程如圖2 所示。
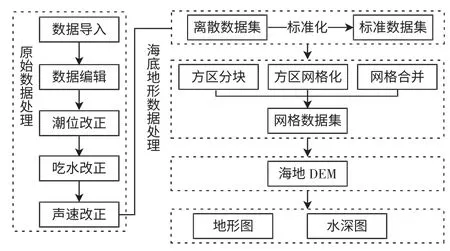
圖2 海底地形數據處理流程
2 海陸地形轉換關系實現
由于上述兩種資料采用基準面的不同,在垂直方向存在較大差異,無法滿足航空DEM 和海底DEM 拼接的需要,必須建立兩種數據源垂直基準向地理信息表達通用高程基準的轉換數學模型。
在資料采集及資料成果在垂直方向上主要涉及以下基準面(許家琨等,2011),如圖3 所示。
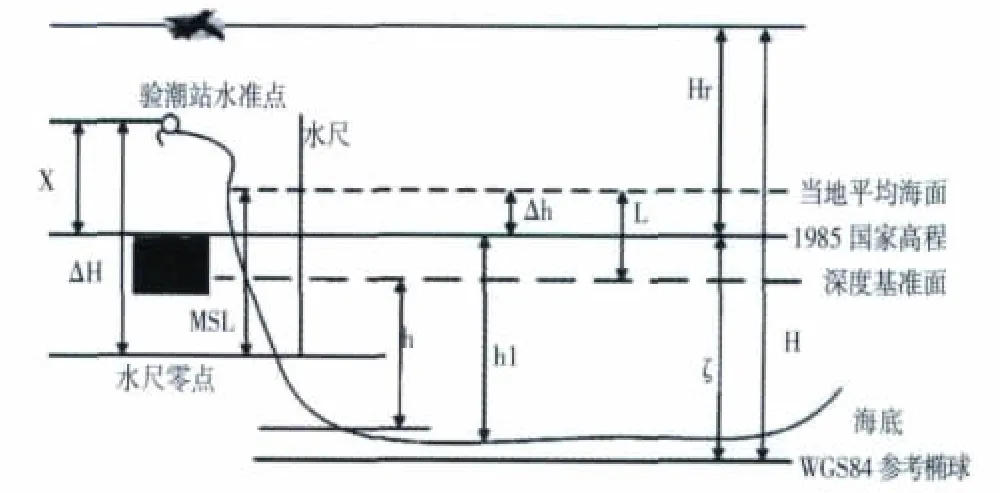
圖3 垂直方向上各基準面關系圖
圖3 中,H 為LIDAR 觀測數據大地高;Hr 為正常高;ζ 為高程異常值;X 為驗潮站水準點與1985 國家高程的垂直距離,即驗潮站水準點在1985 國家高程基準中的高程;ΔH 為驗潮站水準點與水尺驗潮零點的垂直距離;MSL 為平均海面到水尺零點的垂直距離;Δh 為當地平均海面與1985國家高程基準的垂直距離,即海面地形;h 為從深度基準面起算的成果水深;h1 為海底在1985 國家高程基準中的高程負值,即海陸拼接后使用統一高程基準的海底地形高程。
由圖3 知,以下關系式成立:

通過式(1) 可將LIDAR 測得的大地高歸算到正常高,通過式(2) 可將水深成果從理論深度基準面歸算至1985 國家高程,至此構建了區域高程基準和深度基準的相互轉換數學模型。
由式(1)、(2) 可知,實現此轉換關鍵在于如何準確計算ζ、Δh 及L。
(1) ζ 的計算方法:采用GPS 觀測和水準聯測方法獲取測區內的大地高和正常高,通過高程擬合,建立兩者之間的轉換模型。
(2) L 的計算方法:我國深度基準面采用由13 個分潮(Sa,Ssa,Q1,O1,P1,K1,N2,M2,S2,K2,M4,MS4,M6) 確定的理論最低潮面(簡稱TLT)。根據《海道測量規范·GB12327—1998》TLT 計算公式計算求得。也可取海圖(及潮汐表)采用值。
(3) Δh 的計算方法:采用幾何水準測量的方法,按照國家三、四等水準測量要求,直接聯測1985 國家高程的水準點至驗潮站主要水準點(或工作水準點) 的高差x,根據下式計算得到該驗潮站平均海面的高程Δh:

式中,ΔH 通過常規測量方法可得。
3 應用研究
在上海海岸帶區域,選取12 個GPS 控制點,其中包括3 個上海市E 級GPS 控制網點。以該3個控制網點為基準點進行聯測,測量其余9 個聯測點WGS84 坐標(B,L,H),同時按照四等水準要求進行水準聯測,獲得其正常高。同時,在測區范圍內均勻采集了10 個校核點的WGS84 坐標,按四等水準測量施測其正常高。
在上海沿岸布設5 個臨時水位站,點位布設如圖4 所示。采用直立式直讀水尺,人工觀測潮水位,潮位觀測漲、落潮均按每半小時觀測一次,為在其周邊2 m 等深線以淺海域單波束測量提供水位改正數,將測深成果歸算至深度基準,水深測量測線布設間隔為100 m。
基于外業觀測成果,采用二次曲面擬合方法,求解出陸上各觀測點的高程異常值,并通過檢校點進行了精度評定,結果如圖5 所示。
由圖5 可見,高程擬合的殘差基本在厘米級,中誤差為0.05 m,滿足專項海岸帶調查DEM 數據處理1 ∶10 000 比例尺精度要求(國家海洋局908專項辦公室,2006)。
對臨時水位站的水位觀測值進行了潮位計算及校核,并繪制成相應的水位過程線作合理性分析,根據測量瞬時水深和相應潮位計算出測點高程,經解算求得Δh = 0.023 m;依據《2011年潮汐表》中,得L=0.202 m,再由式(2) 即可建立深度基準面和1985 國家高程基準之間的關系。
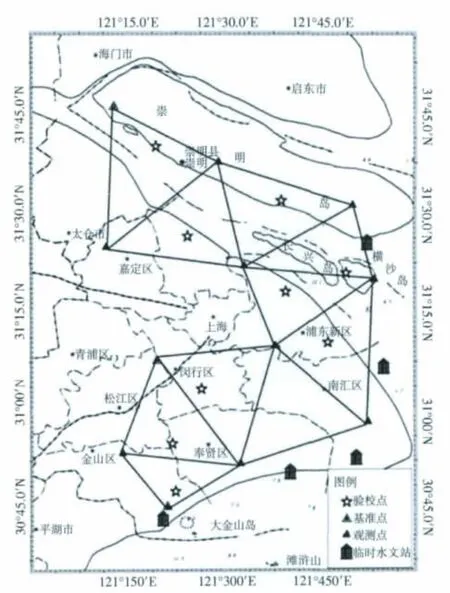
圖4 上海市海岸帶地區外業觀測點位布設圖
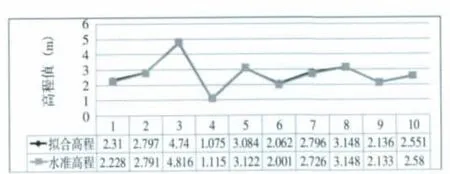
圖5 擬合高程與水準高程值對比
利用測區LIDAR 資料和單波束觀測結果分別構建了陸、海DEM,并基于轉換關系進行了拼接,圖6(a) 顯示了基準轉換前陸海拼接模型(大地高和深度基準面),可以明顯地看出陸海拼接處有一縫隙,地形剖面變化值顯著;圖6(b) 顯示了統一到1985 國家高程基準后的海陸拼接模型,可以看處,地形剖面變化值平緩,海陸接邊處實現了無縫拼接。
4 結論與展望
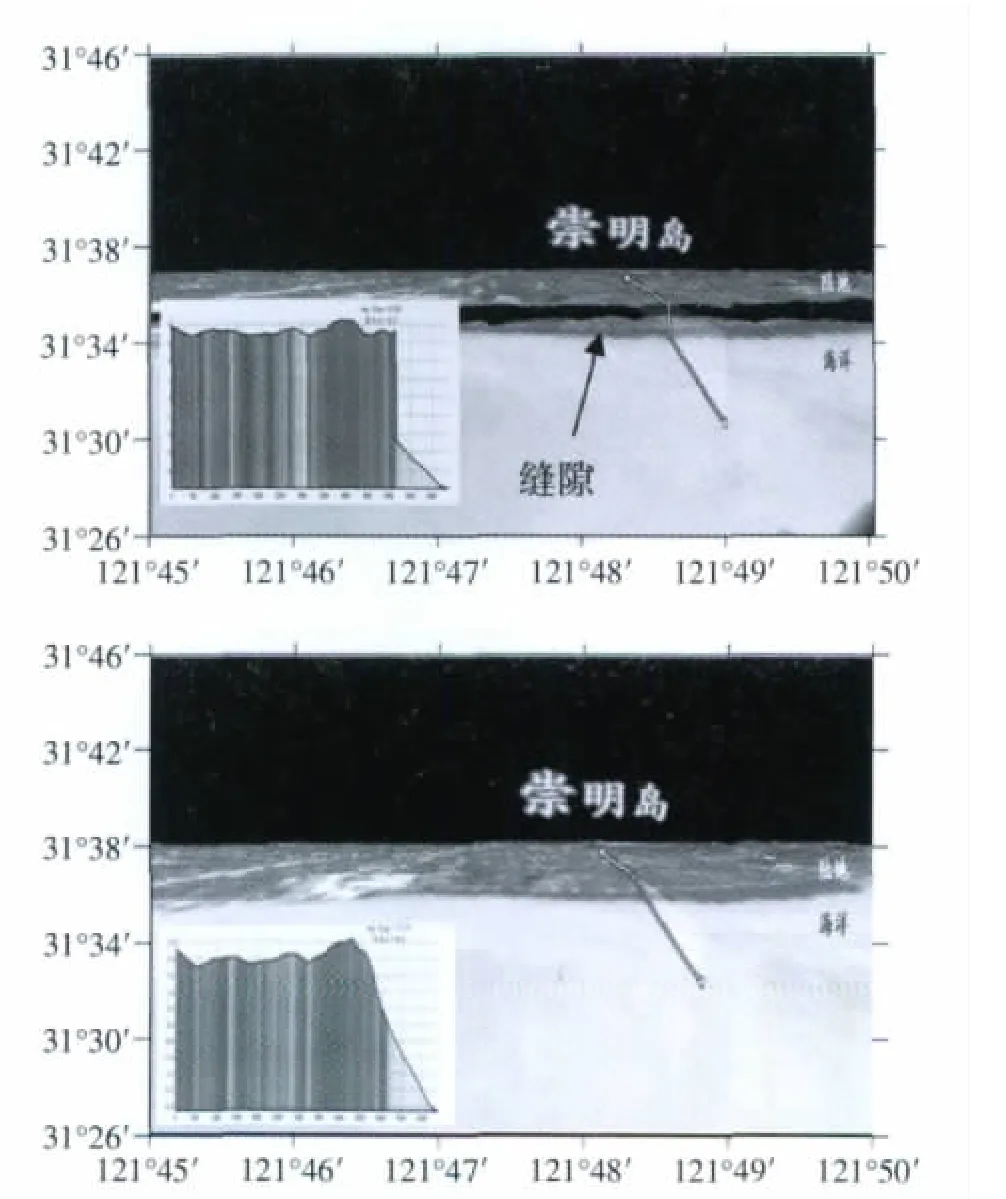
圖6 基準轉換前后海陸拼接模型對比
本文在分析研究海陸地形轉換構建方法的基礎上,以上海市海岸帶為例,采用高精度GPS 測量和水準測量,確定了區域大地高和正常高之間準確的轉換關系,并結合潮位數據,應用水深觀測數據,建立起深度基準面與1985 國家高程基準之間的轉換模型,實現了海陸高程數據的無縫拼接,研究成果可為“數字海洋”構建、海洋公益性數據服務、海洋環境監測與預警等提供基礎技術支撐。但本文數據源多依靠外業觀測手段獲取,對于資料稀缺或難以施測區域的應用有待進一步深入研究。
GB12327-1998 海道測量規范:31-32.
鞏淑楠,陳云,徐敏,2010.測繪與空間地理信息,33(5):165-167.
國家海洋局908 專項辦公室,2006.海島海岸帶航空遙感調查技術規程.北京:海洋出版社.
韓凌云,楊英力,2003.地形圖與海圖拼接的矛盾問題及其處理.海洋測繪,23(4):34-37.
史照良,曹敏,2007.基于LIDAR 技術的海島礁_灘涂測繪研究.測繪通報,5:49-53.
許家琨,申家雙,繆世偉,等,2011.海洋測繪垂直基準的建立與轉換.海洋測繪,31(1):4-8.
陽凡林,李家彪,吳自銀,等,2008.淺水多波束勘測數據精細處理方法.測繪學報,37(1):444-457.
張玉方,程新文,歐陽平,等,2008.機載LIDAR 數據處理及其應用綜述.工程地球物理學報,5(1):119-124.
猜你喜歡
中學生數理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
電子測試(2018年4期)2018-05-09 07:28:12
當代化工研究(2016年9期)2016-03-20 16:22:13
中國慣性技術學報(2015年1期)2015-12-19 13:12:17
計算機工程(2015年4期)2015-07-05 08:28:04
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
聯合國青年技術培訓(2014年7期)2014-04-12 00:00:00
中國質量與標準導報(2014年7期)2014-02-28 22:24:35
