新型混合動力系統能量管理優化研究
2013-04-11 06:05:46馬培培胡艷青
車用發動機 2013年6期
馬培培,閆 斌,胡艷青,楊 林
(1.上海交通大學汽車電子研究所,上海 200240;2.上海交通大學動力機械與工程教育部重點實驗室,上海 200240)
相對于傳統的常規車輛,混合動力汽車具有節油減排潛力;相對于純電動汽車,混合動力汽車具有低成本優勢。因此,近年來混合動力汽車成為汽車技術發展和研究的一個熱點。
在混合動力汽車的諸多關鍵技術中,影響車輛節油減排潛力的關鍵因素是混合動力系統的構型,節油減排潛力能否得到充分發揮的關鍵因素是能量管理優化方法。
混合動力汽車能量管理優化的諸多方法,如動態規劃方法[1]、遺傳算法[2]等,均需首先預知車輛行駛工況,因此無法用于實時優化控制。基于規則的能量優化控制策略是目前常用的實時控制方法,但由于該方法一般基于經驗對系統的效率進行優化,無法確保獲得最優控制,系統節油潛力難于充分發揮[3-4]。最小值原理作為一個可靠的優化方法應用于混合動力車輛中,可通過全局尋優的權重因子來確定全局中電能和燃油能耗的分配[1],對每個時刻來說,權重因子可以決定電機和發動機的轉矩分配[6]。
因此,本研究在綜合分析各類混合動力系統構型及能量管理優化方法的基礎上,以一種新型的混合動力系統為對象,進行基于最小值原理的能量管理優化研究,并探討實時優化控制的方法。
1 新型混合動力系統
研究對象為某新型混合動力系統(見圖1),包括發動機、電機 MG1、電機 MG2、電控離合器以及由行星齒輪系與電控2擋減速傳動機構組成的機電耦合箱。其中,電機MG2的轉子可以通過齒輪傳動機構直接與輸出軸out相連,也可以通過齒輪傳動機構與行星齒輪系的太陽輪相連;電機MG1的轉子與發動機通過離合器連接,并與行星齒輪系的齒圈連接;輸出軸與行星齒輪系的行星架連接。系統具有如下主要特點:
1)系統具有4種典型的工作模式(見表1),可通過能量管理策略柔性控制;
2)單電機純電模式可解決在車輛起步或車速較低時油耗高的問題,并可通過對電機MG2的減速增矩,在電機小型化的同時提高車輛動力性;
3)基于行星齒輪系的機電耦合,可在雙電機純電模式和混聯模式進行無級調速控制,使系統效率最優;
4)串聯模式可在特定工況下進一步優化系統效率,并克服低溫、起步時電池放電能力可能不足的問題。
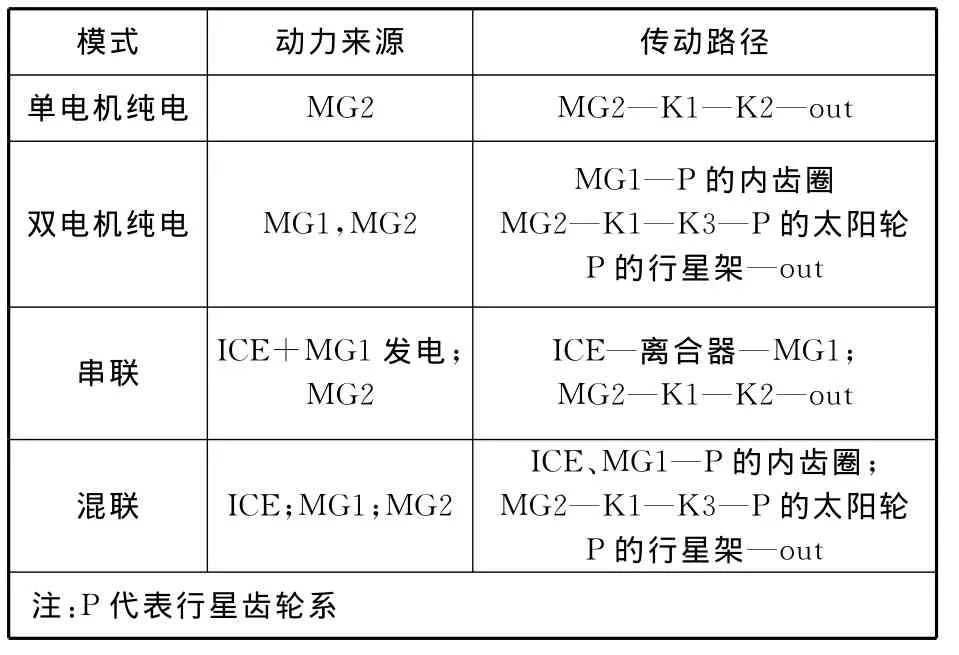
表1 混合動力系統工作模式
2 能量管理優化方法
2.1 權重因子的引入
對于本研究的混合動力系統,整車功率平衡式為
式中:Preq(t)為t時刻整車需求功率;PMG(t)為t時刻電機1功率PMG1(t)與電機2功率PMG2(t)之和;PICE(t)為t時刻發動機功率。
顯然,PMG(t)越小,則單位時間消耗的燃油量越多、消耗的電池能量越小;PMG(t)越大,則單位時間消耗的燃油量越少、消耗的電池能量越多。因此,為使SOC在一個時間窗口內達到平衡,當前時刻不合理多消耗的電池能量需要在后續過程中通過多消耗一定數量的燃料來補充,而當前時刻不合理少消耗的電池能量也將在后續過程通過少消耗燃料來消耗。因此,要在實現循環工況總燃油消耗量最小前提下,尋找PMG(t)的最優分配。
由于發動機、電機MG1、電機MG2和電池BP的效率對系統效率的影響,本研究以PMG(t)中凈消耗的考慮電池效率后的電池功率PBP(t)和PICE(t)對應燃油消耗量的等效功率Pfuel(t)來評價系統當前時刻的能量消耗,并引入一個參數λ[7]來衡量二者的使用程度。在時刻t∈[0,N](N為在運行工況中的采樣點),設Δt為采樣時間間隔,定義
λ反映了通過電池輸出能量的權重系數。當J(t)最小時,λ越大,則同一Preq(t)下通過電池輸出的能量越少,反之,則電池輸出的能量越多。
Pfuel(t)與離合器的狀態以及與發動機扭矩TICE(t)、轉速wICE(t)或怠速轉速 widle(t)相應的燃油消耗率有關,即:
式中:C(t)為t時刻離合器的狀態(C(t)=0為閉合,C(t)=1為斷開);mfuel,idle(t)為怠速燃油消耗率;mfuel,out(t)為t時 刻 燃 油 消 耗 速 率;H 為 燃 油 低熱值。
電機MG2消耗的電能可以來自電池,也可來自電機MG1發電輸出的電能。電機的效率由其運行點和運行模式決定。為敘述方便,統一記電機MG1在運行轉速 wMG1(t)、轉矩 TMG1(t)時的電動或發電效率為ηMG1(t),電機 MG2在運行轉速wMG2(t)、轉 矩 TMG2(t)時 的 電 動 或 發 電 效 率 為ηMG2(t),則當前時刻t電池的輸出功率為
同樣,為敘述方便,統一記電池的充電或放電效率為ηBP(t)。ηBP(t)為電池電流IBP(PBP(t))和SOC(t)的函數,則
SOC(t)可通過電流積分計算:
式中:CBP為電池額定容量。
考慮到電池充放電能力、電池老化和電池效率,將SOC控制在一定范圍內,即
式中:SOC0為初始SOC值;ξ為SOC變化范圍的限值。而對于t,由于圖1所示系統具有串聯、混聯運行模式,將SOC的變化量限制在一個較大的范圍即可,這也有利于系統效率的優化。
由此,圖1所示系統的能量管理優化問題即可轉化為在滿足式(7)條件下對J(t)的優化問題,其對應的 Hamilton函數[8-9]為
對式(8)求偏導,則有:
因此
即λ(t)為常數時,Hamilton函數存在最小值。相應地,給定λ值,Hamilton函數最小值對應的自變量值也可解。因此,給定一個λ,存在對應于該λ的最優能量分配方式;改變λ值,可獲得不同SOC控制范圍內的最優能量分配方式;通過對λ的優化,存在將SOC控制在其變化限制范圍內的最優能量分配方式。
2.2 優化模型
根據式(2)、式(8)和式(11),系統能量管理的優化目標可轉化為
各動力部件的轉速和輸出轉矩受自身特性的限制。
轉速限制:
轉矩限制:
SOC限制:根據循環結束時SOC的反饋值修正權重因子,實現閉環控制。在一個循環工況內,SOC可被限制在最終目標限制值ξN,從而實現循環SOC平衡前提下的能耗最小,即
為避免發動機頻繁起停及擋位頻繁切換,優化中設定模式最短持續時間設為5s,根據Treq,wreq設置了換擋延遲。為避免發動機轉速過于劇烈地瞬態變化,優化中設置了對發動機轉速變化速率的限制,因此優化中未對發動機特性進行瞬態修正。
2.3 優化流程
建立系統數學模型以及優化模型后,在當前時刻t,按優化模型分別計算4種模式的j(t),選擇j(t)最小的擋位G、模式M,即可得對應當前λ值的最優能量分配。當滿足式(19)限制條件時,即可得SOC平衡下的最優能量分配。優化流程見圖2。其中:
1)單電機純電模式下,wMG2(t),TMG2(t)須滿足整車驅動Treq(t),wreq(t)需求;
2)雙電機純電模式下,根據Treq(t)按行星齒輪系的轉矩關系分配TMG1(t),TMG2(t);為利用系統的無級變速作用優化系統效率,本研究以wMG1(t)為優化變量;
3)串聯模式下,以TMG1(t)和 wMG1(t)為優化變量;
4)混聯模式下,以TICE(t)或TMG1(t)為一個優化變量;為利用系統的無級變速作用優化系統效率,可以wICE(t)或wMG1(t)或 wMG2(t)為另一個優化變量;本研究以TMG1(t)和wMG1(t)為優化變量。
因此,最優控制變量為
2.4 優化結果
為了克服車輛模型參數不準確帶來的優化結果的不可靠,本研究直接采用從常規車輛基于典型城市公交循環實際運行中采集的車速(見圖3)、驅動轉矩(見圖4)等數據進行新型混合動力系統的能量管理優化,而制動轉矩則基于ECE制動法規計算得出。整車計算參數見表2。

表2 整車計算參數
由于插電混合動力汽車相對常規混合動力汽車具有更顯著的節能減排效果,通常采用的一種控制策略是電量消耗-維持型控制策略,其關鍵是電量維持階段的能量分配。因此,本研究中設SOC0為0.3,設ξN為0.001。優化后,整車百公里油耗為21.93L,相對于原型車的百公里油耗36.56L,節油率為40.02%。
MG1,MG2的轉矩分配及SOC隨時間的變化見圖5和圖6。圖7示出發動機運行點的分布。由圖可見:發動機絕大部分運行點的效率大于40%,其他運行點的效率也都大于34%。這表明優化過程中充分利用了混合動力系統的無級變速作用,使發動機運行在系統效率最優的運行點。發動機運行點分布在一定的轉速和轉矩范圍內,而非集中在最佳油耗線區域,原因是在優化中對模式最短持續時間的設定、對發動機轉速變化速率的限制和換擋延遲,同時也是對系統綜合效率優化的結果。
由于能量管理優化的系統運行模式與擋位存在嚴格的對應關系,優化模型中也已考慮了基本的擋位和模式切換控制策略,因此優化結果可協助制作換擋線MAP。
3 基于全局優化的能量管理實時控制策略
3.1 能量管理控制策略
為滿足控制實時性的要求,車輛的實時控制一般由控制邏輯和MAP表組成。基于特定工況的優化結果應用于實際的控制中,相當于是一種開環控制,可能會因實際與理論的差異導致控制的偏差。
通過計算分析,λ與SOC變化量間呈單調性(見圖8),因此,實時控制中可以將在設定時間或里程內SOC的變化量作為反饋量,對λ進行PI閉環控制來實現SOC的平衡控制,即由PI控制器在線整定λ。
根據前述優化模型和優化流程,可預先優化出不同λ值的u*(t)的 MAP,并存儲于控制器 HCU的ROM內。對于PI控制器輸出的λ,選擇相應的MAP通過插值運算即可實現在當前λ下的能量近似最優分配,即實現基于全局優化的能量管理實時控制。
為便于實時控制,采用整車需求轉矩和車速為u*(t)的MAP表的坐標;在混聯模式和串聯模式下將TMG1和轉速wMG1轉化,以發動機扭矩TICE和轉速wICE為優化控制變量。圖9、圖10分別示出λ=2.39時混聯模式下SOC平衡的能量管理優化的擋位分布和發動機扭矩、轉速分配。其他λ值對應的能量分配方式與此類似。
記λi對應的預先優化能量分配表為MAPi,可設計如圖11所示的基于全局優化的能量管理實時控制策略。在SOC不平衡時,對于PI控制輸出λ選擇相鄰的λi和λi+1對應的 MAPi,MAPi+1,根據當前車速和整車需求轉矩分別插值計算(t)和(t),然后再對(t)和(t)插值計算當前λ對應的u*(t)。
3.2 硬件在環仿真測試
為了測試能量管理實時控制策略的有效性,首先對系統進行硬件在環仿真測試,得到的燃油消耗以及相對于原型車的節油率見表3。然后,選擇原型車在另一線路上運行時采樣的數據,基于圖11所示的控制策略對系統進行硬件在環仿真測試,經過λ閉環控制,整個循環過程SOC隨時間變化見圖12,節油率達到33.56%,比離線優化的節油率低4.5%。總體看來,2種路況的硬件在環仿真的節油率比離線優化的節油率均低4%~6%,這是由于優化模型中尚未考慮換擋過程中的能量消耗,對預先存儲能量分配MAP的λ值的選取也有待細化。這表明本研究提出的基于全局優化的能量管理實時控制策略是切實有效的。

表3 不同系統燃油消耗對比
4 結論
a)所研究的新型混聯式混合動力系統具有可靈活控制的4種典型的工作模式,并可實現無級調速,具有顯著的節油潛力;
b)利用引入的權重因子λ來衡量燃油消耗輸出能量與電池輸出能量的比重,在λ為定值時,總能量消耗存在最小值;利用最小值原理對混合動力系統進行能量優化是有效的,可實現系統能量分配優化,也可用于優化確定合適的換擋區間;基于車輛實際道路運行數據的能量管理優化后,系統節油率達40%左右;
c)循環工況結束時SOC隨λ單調變化,通過閉環控制λ可實現SOC平衡的能量管理優化;基于2種不同路況的車輛運行數據,通過硬件在環仿真測試,SOC均能實現平衡控制,節油率分別達34.96%和33.56%,均比離線優化后的節油率低4%~6%左右,表明該策略是切實可行的。
[1] Laura V P,Guillermo R B,Diego M.Optimization of power management in an hybrid electric vehicle using dynamic programming[J].Mathematics and Computers in Simulation,2006,73:244-254.
[2] Morteza M,Amir P,Babak G.Application of genetic algorithm for optimization of control strategy in parallel hybrid electric vehicles[J].Journal of the Franklin Institute,2006,343:420-435.
[3] 舒 紅.并聯型混合動力汽車能量管理策略研究[D].重慶:重慶大學,2008.
[4] Salmasifr.Control strategies for hybrid electric vehicles:evolution,classification,comparison and future trends vehicular technology[J].IEEE Trans,2007,56(5):2393-2404.
[5] Lars J,Stefan P,Egardt B.Predictive energy manage-ment of a 4TQ series-parallel hybrid electric bus[J].Control Engineering Practice,2009(17):1440-1453.
[6] Thijs Van K,Dominique Van M,Bram De J,et al.Design,implementation,and experimental validation of optimal power split control for hybrid elecreic trucks[J].Control Engineering Practice,2012(20):547-558.
[7] Kim N,Cha S,Peng H.Optimal control of hybrid electric vehicles based on Pontryagin's Minimum Princople[J].IEEE Transactions on Control Systems Technology,2011(19):1279-1287.
[8] Delprat S,Guerra T M.Control strategy for hybrid vehicles:optimal control[J].IEEE VTC,2002:1681-1685.
[9] Delprat S,Lauber J,Marie E T,et al.Control of a parallel hybrid powertrain:optimal control[J].IEEE Trans.Veh.Technol,2004(53):872-881.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
時代英語·高二(2015年1期)2015-03-16 00:08:11
現代企業(2015年2期)2015-02-28 18:45:09