基于LabVIEW的運動控制卡對SINAMICS S120控制實現*
2013-06-09 12:34:00王永泉陳花玲徐亞明
機械研究與應用 2013年5期
張 浩,王永泉,陳花玲,徐亞明
(1.西安交通大學機械工程學院,陜西西安 710049;2.大連機床股份有限公司車床研究所,遼寧大連 116021)
基于LabVIEW的運動控制卡對SINAMICS S120控制實現*
張 浩1,王永泉1,陳花玲1,徐亞明2
(1.西安交通大學機械工程學院,陜西西安 710049;2.大連機床股份有限公司車床研究所,遼寧大連 116021)
介紹一種面向機床伺服進給運動控制系統的設計與實現。該系統基于LabVIEW虛擬平臺豐富的函數庫功能及其與硬件良好的接口性能,以GTS-400-PV-PCI-G型運動控制卡為核心,通過西門子擴展端子TM41提供的可模擬增量式編碼器接口及模擬量輸入接口,對西門子新一代產品SINAMICS S120單軸交流驅動器進行運動控制,從而實現對1FT6086伺服電機的實時控制。
運動控制;TM41;LabVIEW;動態鏈接庫
1 引言
面向數控機床等機電產品的運動控制系統的設計正日趨模塊化,即基本框架采用運動控制卡和工控機,外圍設備采用符合接口標準的伺服驅動系統[1]。這種設計模式不僅通用性好、成本低且技術成熟、穩定性好,可有效縮短設計周期。筆者選用了西門子新一代產品SINAMICS S120伺服系統,正常情況下采用西門子公司配套生產的PLC對其進行運動控制,成本較高。本研究介紹一種采用固高GTS系列運動控制卡對西門子新一代產品SINAMICS S120伺服系統的運動控制方法。
2 伺服控制系統硬件組成
本項目的運動控制系統的上位控制器選用工控機,下位控制器則采用了運動控制器配合伺服驅動器的方式,由上位工控機對下位運動控制器發送控制命令[2],由下位運動控制器完成相關運算和運動控制,再由伺服驅動器按照命令驅動電機,完成定位操作,整個控制系統硬件連接示意圖如圖1所示。表1為搭建整套系統所需的主要硬件。
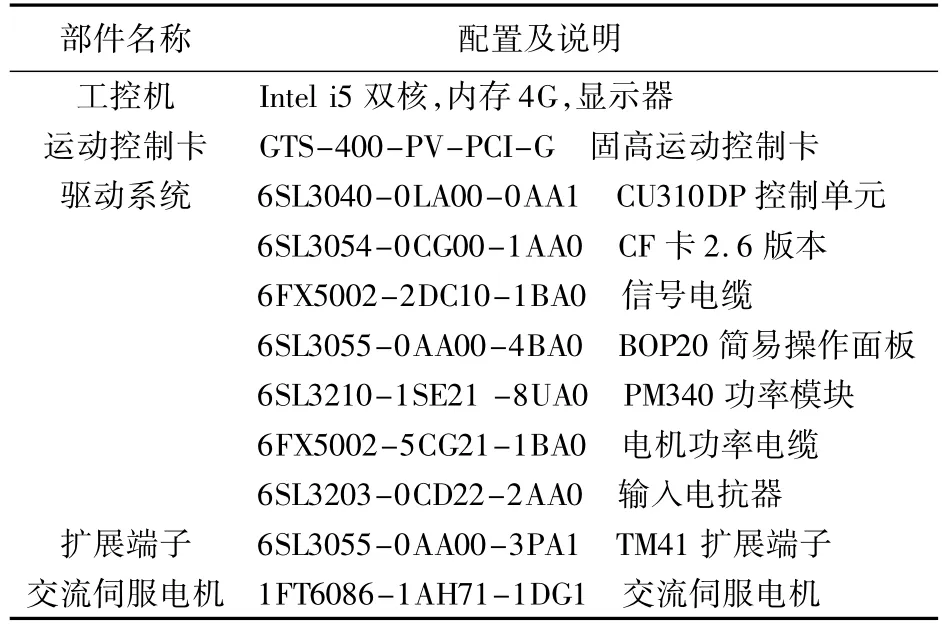
表1 控制系統的主要硬件
2.1 西門子SINAMICS S120驅動系統
本控制系統選用西門子SINAMICS S120單軸交流伺服控制器來完成伺服驅動功能。SINAMICS S120伺服驅動器(以下簡稱西門子S120)是西門子公司推出的新一代伺服驅動單元,它具有模塊式設計的功能[3],并能夠實現機動、靈活和高效的驅動控制,同時還可進行快速、可靠的安裝與調試。它通過DRIVE-CLIQ通訊電纜進行數據連接,將V/F控制、矢量控制和伺服控制集于一體,可實現控制軸的絕對和相對定位,具有強大的定位功能,總體性能遠遠超過同類變頻系統。
一套 S120伺服驅動器包括一個控制單元CU310DP和一個功率模塊PM340,圖2為該伺服驅動器及相關配件的電氣接線示意圖。

圖1 控制系統硬件連接
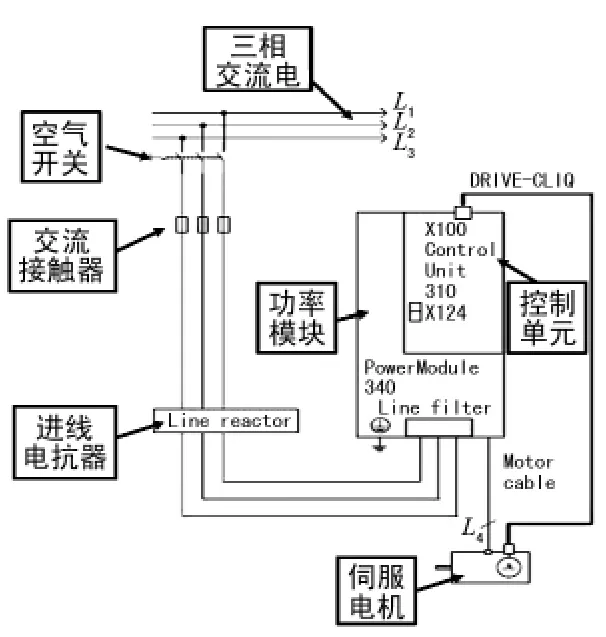
圖2 SINAMICS S120伺服驅動系統接線圖示
2.2 運動控制卡
運動控制卡選用固高公司生產的GTS-400-PVPCI-G板卡。該運動控制卡可以工作于脈沖模式或者模擬量模式,用戶可根據需要進行選擇。本控制系統選擇模擬量控制模式,運動控制卡最大輸出電壓為±10 V,電壓值的大小對應轉速大小,符號對應轉向。使用固高科技提供的 Motion Controller Toolkit 2008運動控制器管理軟件能夠方便地對系統硬件資源和軟件資源進行組合,來完成對系統各個資源的基本屬性配置[4]。
控制方式選擇半閉環控制方式[5],控制系統的反饋取自伺服電機內置的增量式編碼器,此控制方式可以補償系統的控制指令誤差,圖3所示為系統半閉環控制方式的示意圖。
2.3 運動控制卡與S120伺服系統接線
半閉環控制方式要求運動控制卡連接驅動器相對應的接口,具體包括運動控制器對伺服電機編碼器反饋信號的讀取及運動控制器輸出的模擬電壓控制信號兩個主要部分,但驅動器控制單元CU310DP上并未設置相應的接口,導致運動控制器不能直接對CU310DP進行控制,所以在控制過程中需要中間擴展單元。在此選用西門子TM41擴展端子,TM41包括X520編碼器接口和X523模擬輸入端接口,其中X520編碼器接口將伺服電機編碼器信號反饋給運動控制卡,X523模擬輸入端接口接受來自運動控制卡經過計算后輸出的模擬電壓控制信號,具體連線圖如圖4所示。
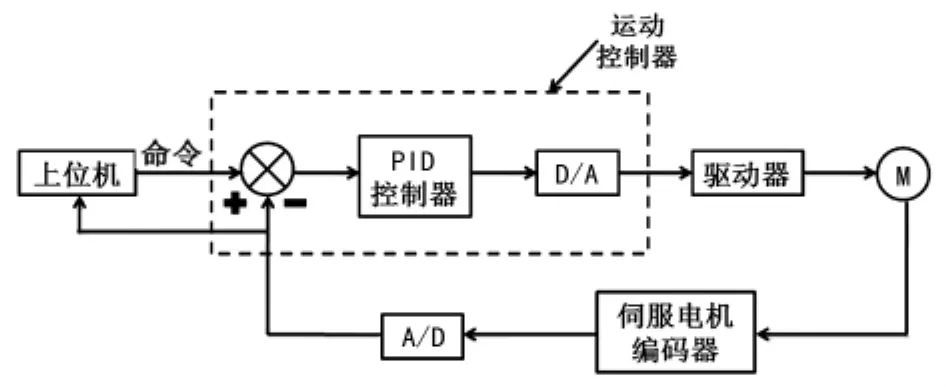
圖3 半閉環控制方式示意圖
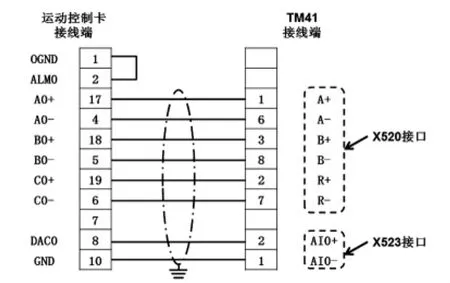
圖4 運動控制卡與TM41接口連線圖示
3 伺服控制系統的調試和配置
3.1 S120驅動系統的硬件組態與優化
上位機與S120的通訊方式有兩種,DP通訊卡或RS232的連接方式,其中RS232通訊方式需上位機配有RS232接口,采用標準的RS232電纜,在西門子Starter調試軟件中選定相應的串口通訊方式即可。在硬件接線正確情況下,在Starter軟件中插入驅動裝置后選擇在線項目,本系統為集成DRIVE-CLIQ接口的電機,可通過自動組態的方式將電機與編碼器等硬件的數據讀出再通過軟件進行控制調試[6]。
版本V2.5以上的SINAMICS S120為用戶提供了自動優化功能(Automatic controller setting),通過自動優化功能可以識別電流環、正負向負載測量、自動設置速度環參數等,自動優化后可使伺服電機在更優的狀態下進行工作。
3.2 擴展端子TM41的配置
在硬件連接及軟件調試完畢之后,需要對TM41擴展端子進行配置才能完成對西門子S120伺服系統的運動控制,具體設置的步驟如下:
(1)TM41模擬輸入(Analog Input)設置
TM41的模擬輸入接口連接到SERVO_02軸的p1155參數,即轉速控制參數,代表SERVO_02軸的轉速控制來自外部的模擬電壓輸入,如圖5所示,在圖5中界面點擊Scaling選項,可設置輸入電壓范圍值,本系統輸入電壓范圍為±10 V。

圖5 TM41的X523接口設置
(2)TM41脈沖模擬編碼器(Pulse encoder simulation)設置
TM41的Master Value接口連接到SERVO_02軸的r63參數,即轉速實際值,TM41在讀取到SERVO_ 02軸的轉速之后可輸出模擬增量式編碼器信號,在此接口可讀取符合RS422標準的運動控制卡能夠讀取的正交編碼器信號,具體設置如圖6所示。

圖6 TM41的X520接口設置
(3)TM41及SERVO_02軸的使能設置
在Starter軟件中,參數 p840代表指令“ON/ OFF”,分別設置TM41及SERVO_02軸參數p840的信號源為TM41的X522數字量輸入接口DI 0和DI 1,如圖7所示,在DI 0和DI 1接通之后TM41及SERVO_02軸即處于使能狀態。

圖7 TM41及SERVO_02軸的使能參數設置
即TM41參數設置完畢,可進行運動控制調試。
4 基于LabVIEW虛擬平臺的運動控制程序
4.1 動態鏈接庫(DLL)的調用
GTS-400-PV-PCI-G運動控制卡提供Windows系統環境下的動態鏈接庫(Dynamic-Link-Library, DLL)[7],庫中包含了對運動控制器讀寫的全部函數,針對LabVIEW調用DLL的特點和運動控制的復雜性,DLL中包含多個可供調用的函數。這些函數都調用運動控制函數庫中的一個或多個函數,DLL中每個可供調用的函數都對應著某一具體任務,稱其為功能函數。但由于LabVIEW為圖形化編程環境,所以必須將動態鏈接庫中的函數全部轉換為在LabVIEW環境下可以使用的函數形式。
4.2 運動控制程序實現
本系統選用的運動控制卡可以對伺服電機的運動軌跡進行不同類型的規劃,采用模擬量控制模式,可進行T形曲線和S形曲線或電子齒輪模式等運動方式,設置運動中的PID參數[8],采用固高科技有限公司GTS系列運動控制器和LabVlEW調用DLL進行電動機運動軌跡編程控制,調用固高科技有限公司開發的函數庫,完成對電動機不同規劃軌跡的控制功能。如圖8所示為使用LabVIEW2011軟件編寫的伺服電機速度T形曲線運動控制程序。

圖8 采用LabVIEW編寫的速度T形曲線控制程序
5 結語
本控制系統已成功應用于滾珠絲杠副綜合性能測試試驗臺,現已正常運行并可投入生產。實踐表明此控制系統穩定性和可靠性較高,能準確實現對伺服電機的實時控制。
[1] 朱曉明,徐 巖,齊海龍,等.四軸轉臺系統軟件功能設計[J].機床與液壓,2010,38(8):78-80.
[2] 崔 延,張筱云.基于GT運動控制卡的數控雕刻機系統研究[J].機械研究與應用,2011(5):130-132.
[3] 郁林聰,吳 達.基于SINAMICS S120的變速器試驗臺加載控制系統設計[J].制造業自動化,2010,32(10):219-220.
[4] 固高科技(深圳)有限公司.GTS系列運動控制器編程手冊[Z].2011.
[5] 劉彥鵬.運動控制新技術及應用[J].裝備制造技術,2009(8): 124-126.
[6] 西門子(中國)有限公司.SINAMICS S120調試手冊[Z].2010.
[7] 龍華偉,顧永剛.LabVIEW8.2.1與DAQ采集[M].北京:清華大學出版社,2008.
[8] 陶永華.新型PID控制及其應用[M].北京:機械工業出版社,2005.
Realization of Motion Control for SINAMICS S120 Using Motion Control Card Based on LabVIEW
ZHANG Hao1,WANG Yong-quan1,CHEN Hua-ling1,XU Ya-ming2
(1.School of Mechanical Engineering,Xi'an Jiaotong University,Xi'an Shanχi 710049,China;
2.Institute of Lathe,Dalian Machine Tool Group Crop,Dalian Liaoning 116021,China)
The design and implementation of a kind of general motion control system towards machine tool is introduced.The system is based on the rich function library and a good performance of interface with hardware of LabVIEW virtual instrument.Using Googol's GTS-400-PV-PCI-G type motion control card as the core,through the expansion terminals TM41 of Siemens which can provide simulated incremental encoder interface and analog input interface,enabling the motion control for new generation of products for Siemens SINAMICS S120 single-axis AC drives,then the real-time control of 1FT6086 servo motor is realized.
motion control;TM41;LabVIEW;DLL
TH12
A
1007-4414(2013)05-0171-03
2013-07-29
“高檔數控機床與基礎制造裝備”科技重大專項;“CL/DL系列中高檔數控車床滾動功能部件應用示范工程”資助(編號: 2012ZX04011022)
張 浩(1989-),男,遼寧阜新人,在讀碩士,主要從事對滾珠絲杠性能測試方面的研究工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
少先隊活動(2021年4期)2021-07-23 01:46:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16