面向血型分析儀的自動加樣機(jī)械臂控制系統(tǒng)設(shè)計*
2013-06-16 02:03:36黎焰勤陳里里
機(jī)械研究與應(yīng)用 2013年2期
廖 強(qiáng),黎焰勤,陳里里
(1.重慶大學(xué)機(jī)械傳動國家重點(diǎn)實(shí)驗(yàn)室,重慶 400044;2.重慶大學(xué)機(jī)械工程學(xué)院,重慶 400044)
1 引言
隨著醫(yī)療檢測技術(shù)的發(fā)展,血型分析鑒定、交叉配血和抗體篩查等的檢測方法已從一般的手工玻片法或試管法,發(fā)展到半自動檢測,再發(fā)展到今天的全自動檢測。但目前國內(nèi)的自動化醫(yī)療儀器自動化水平較低,國產(chǎn)血型分析設(shè)備基本達(dá)不到全自動化要求,全自動血型分析系統(tǒng)的研究剛剛開始,除少數(shù)由于檢測量非常巨大,半自動血型分析儀無法完成日常檢驗(yàn)工作而使用進(jìn)口全自動血型分析設(shè)備的大型醫(yī)療機(jī)構(gòu)外,所使用的血型實(shí)驗(yàn)儀器仍處于半自動狀態(tài)[1]。相反,國外在血型分析儀器領(lǐng)域起步較早,發(fā)展較為迅速,實(shí)驗(yàn)儀器更新?lián)Q代較快,全自動血型鑒定分析設(shè)備自動化程度較高,從而大大提高了血液檢測的效率,降低了人工操作所需的人力成本[2]。全自動血型分析儀的一個重要組成部分是其加樣裝置,加樣裝置在不同位置進(jìn)行抽放樣,因此加樣裝置在不同位置間移動的自動化程度是血液分析儀的自動化程度的重要基礎(chǔ)組成部分[3]。所以,針對目前國內(nèi)發(fā)展現(xiàn)狀,筆者設(shè)計了基于DMC5400運(yùn)動控制卡的血型分析儀自動機(jī)械臂加樣控制系統(tǒng),實(shí)際測試表明該系統(tǒng)能滿足血型分析儀要求的快速化和準(zhǔn)確性。
2 控制系統(tǒng)總體設(shè)計
血型分析儀自動加樣過程:加樣裝置安裝在一個直角坐標(biāo)運(yùn)動平臺上,通過直角坐標(biāo)平臺帶動加樣裝置移動,首先加樣裝置移動到樣品試管處,抽取樣品,再移動到96微孔板上放出樣品,然后移動到試劑試管處,抽取試劑,移動到96微孔板上,放出試劑,讓試劑與樣品混勻,然后再吸取混勻和的液體,運(yùn)動到測量槽,放出液體,然后到清洗位置清洗,最后回到原點(diǎn)或進(jìn)入下一個工作循環(huán)。加樣裝置的工作路徑可由圖1所示。
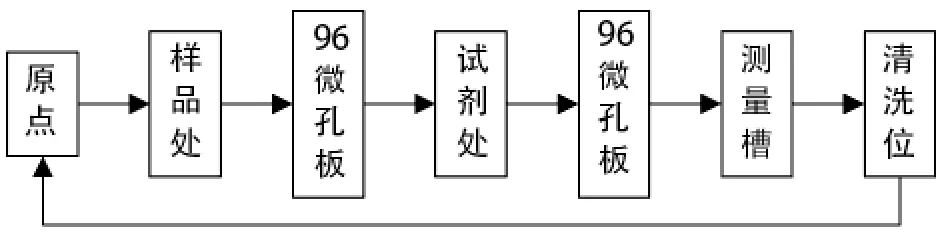
圖1 加樣裝置工作循環(huán)
因此,本控制系統(tǒng)的主要任務(wù)就是控制直角坐標(biāo)運(yùn)動平臺帶動加樣裝置運(yùn)動到指定位置。該系統(tǒng)由主控計算機(jī)、DMC5400運(yùn)動控制卡、伺服驅(qū)動器、伺服電機(jī)、滾珠絲杠、光柵尺等組成,構(gòu)成一個閉環(huán)交流伺服運(yùn)動控制系統(tǒng),其中DMC5400是本系統(tǒng)的核心和重點(diǎn)[4]。其系統(tǒng)結(jié)構(gòu)圖如圖2所示。
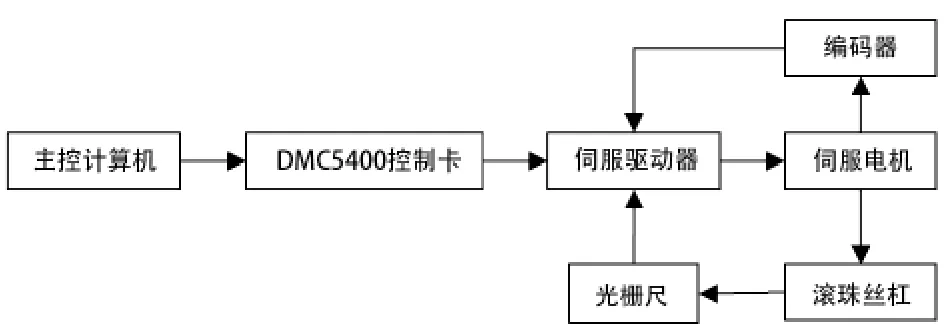
圖2 控制系統(tǒng)結(jié)構(gòu)圖
3 控制系統(tǒng)硬件設(shè)計
目前,常用的運(yùn)動控制技術(shù)有直流電機(jī)驅(qū)動技術(shù)、全閉環(huán)交流伺服驅(qū)動技術(shù)、可編程計算機(jī)控制器以及運(yùn)動控制卡等[5]。運(yùn)動控制卡是一種基于工業(yè)PC機(jī)的上位控制單元,工業(yè)PC機(jī)具有軟件資源豐富、運(yùn)算能力強(qiáng)大、精度高、擴(kuò)展性強(qiáng)等特點(diǎn),采用“運(yùn)動控制卡+工業(yè)PC機(jī)”模式使控制系統(tǒng)更加標(biāo)準(zhǔn)化、柔性化。因此,本控制系統(tǒng)采用運(yùn)動控制卡來實(shí)現(xiàn)。
3.1 控制系統(tǒng)硬件結(jié)構(gòu)設(shè)計
該控制系統(tǒng)硬件部分由主控計算機(jī)、DMC5400運(yùn)動控制卡、交流伺服控制驅(qū)動器、伺服電機(jī)組成。運(yùn)動控制卡插在主控計算機(jī)的PCI插槽上,通過主控計算機(jī)向運(yùn)動控制卡發(fā)出各種運(yùn)動指令,然后通過伺服驅(qū)動器X、Y、Z三軸電機(jī)的運(yùn)動,使機(jī)械臂到達(dá)空間指定位置。硬件組成結(jié)構(gòu)如圖3所示。

圖3 系統(tǒng)硬件結(jié)構(gòu)圖
3.2 控制卡的選型與控制電路設(shè)計
本系統(tǒng)的運(yùn)動控制卡采用雷塞公司的DMC5400運(yùn)動控制卡。該卡以ASIC集成電路為核心,基于PCI總線,可控制四軸數(shù)字式伺服電機(jī)或步進(jìn)電機(jī),可實(shí)現(xiàn)多軸插補(bǔ)聯(lián)動、編碼器位置檢測等功能。常用于工業(yè)機(jī)器人、生物醫(yī)學(xué)自動采樣處理設(shè)備、機(jī)器視覺及自動檢測設(shè)備、激光加工設(shè)備、電子產(chǎn)品裝配測量設(shè)備、半導(dǎo)體及LCD生產(chǎn)設(shè)備、特殊數(shù)控機(jī)床等機(jī)電一體化設(shè)備當(dāng)中。
為使DMC5400控制卡正確控制伺服電機(jī)驅(qū)動器驅(qū)動電機(jī)運(yùn)動,按照圖4所示連接控制電路。分配控制卡接口的1號引腳“PUL1+”和2號引腳“PUL1-”連接X軸電機(jī)驅(qū)動器,這幾個引腳均用于差分輸出脈沖信號,控制X軸直線運(yùn)動平臺的運(yùn)動位置和速度;分配3號引腳“DIR1+”和4號引腳“DIR1-”連接X軸電機(jī)驅(qū)動器,用于差分輸出方向信號,控制X軸直線運(yùn)動平臺的運(yùn)動方向。Y軸與Z軸的控制卡接口與X軸控制卡接口類似,如圖4所示。

圖4 運(yùn)動控制卡控制電路設(shè)計
3.3 伺服電機(jī)與驅(qū)動器的選擇
該系統(tǒng)選用大慣量永磁同步電機(jī)MHMD 022P1U,其主要參數(shù)為:額定功率為200 W;額定頻率為200 Hz;額定轉(zhuǎn)速為3000 r/min;額定轉(zhuǎn)矩為0.64 N·m;最大轉(zhuǎn)矩為1.91 N·m;相電壓為200 V;繞組為星型接法;編碼器選用5線制增量式編碼器,分辨率為10000,脈沖數(shù)為2500 p/r。選用松下Panasonic脈沖控制專用驅(qū)動器,其型號為 MADDT1207003,主要參數(shù):最大瞬時輸出電流10 A;電源單相200 V,電流檢測器的額定電流為7.5 A。
4 控制系統(tǒng)軟件設(shè)計
4.1 軟件總體架構(gòu)
DMC5400運(yùn)動控制卡是本控制系統(tǒng)關(guān)鍵硬件,是一款高性能的PCI四軸運(yùn)動控制卡。DMC5400運(yùn)動控制卡隨卡提供了Window 2000/XP等操作系統(tǒng)下的設(shè)備驅(qū)動程序和運(yùn)動控制函數(shù)動態(tài)鏈接庫dmc5400.dll,它是一個運(yùn)動控制API函數(shù)庫,因此在開發(fā)上層應(yīng)用軟件時不必了解底層硬件細(xì)節(jié),這使得編程變得相對簡單[6]。
系統(tǒng)的軟件部分在Windows XP系統(tǒng)下運(yùn)行,以VC++6.0為開發(fā)工具,采用面向?qū)ο蠛湍K化思想進(jìn)行設(shè)計。機(jī)械臂運(yùn)動控制系統(tǒng)軟件部分的程序由初始化模塊和運(yùn)動執(zhí)行模塊組成[7]。軟件的控制程序流程如圖5所示。
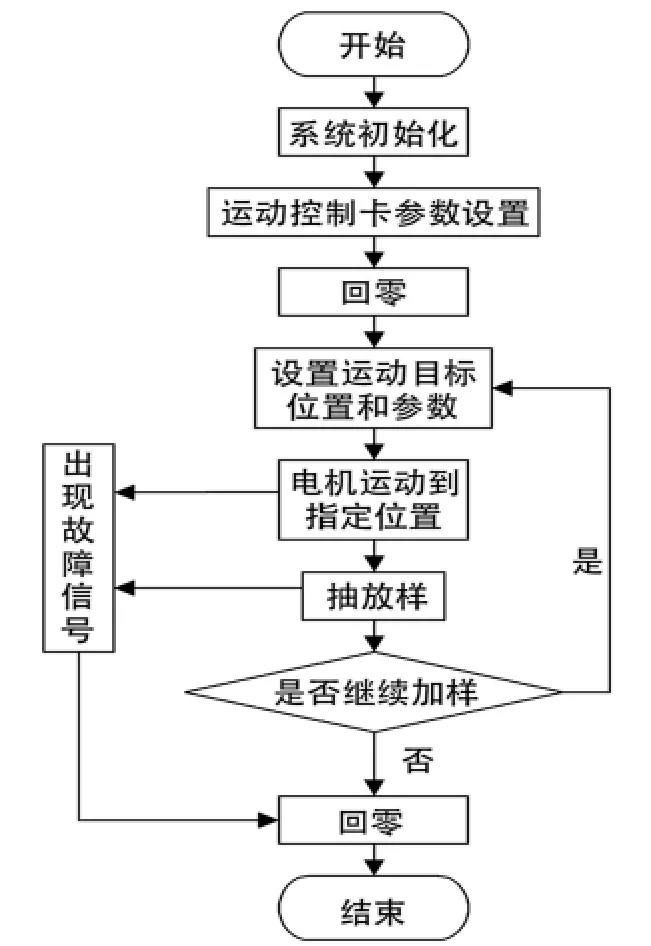
圖5 控制程序流程圖
4.2 運(yùn)動控制卡的編程
4.2.1 初始化控制卡
初始化模塊即對DMC5400運(yùn)動控制卡分配系統(tǒng)資源以及參數(shù)設(shè)置,包括脈沖參數(shù)設(shè)置、伺服電機(jī)參數(shù)設(shè)置、原點(diǎn)參數(shù)設(shè)置以及限位參數(shù)設(shè)置[8]。在初始化函數(shù)中添加的代碼如下。
CardCount=d5400_board_init();//為DMC5400控制卡分配系統(tǒng)資源并初始化控制卡,返回值為0~5,數(shù)字表示控制卡的數(shù)量
if(CardCount==0)
{MessageBox(“沒有發(fā)現(xiàn) DMC5400控制卡!”);}//錯誤提醒
for(i=0;i<4;i++)
{d5400_set_pulse_outmode(i,0);//設(shè)置 4 個軸的脈沖輸出模式
d5400_config_INP_PIN(i,0,1);// 設(shè)置 4 個軸的伺服電機(jī)參數(shù)
d5400_config_home_mode(i,1,4);//設(shè)置 4 個軸的原點(diǎn)參數(shù)
d5400_config_softlimit(i,1,1);//開啟軟件限位設(shè)置
d5400_enable_softlimit(i,1);
}
d5400_set_softlimit_data(0,- 100*2000,800*2000);//設(shè)置X,Y,Z軸的運(yùn)動范圍
d5400_set_softlimit_data(1,- 100*2000,500*2000);
d5400_set_softlimit_data(2,- 20*2000,140*2000);
4.2.2 運(yùn)動控制模塊
運(yùn)動執(zhí)行模塊即對運(yùn)動控制卡發(fā)送指令,完成預(yù)定的動作目標(biāo)。其中,運(yùn)動控制模式分為單軸運(yùn)動控制和多軸運(yùn)動模式。
(1)單軸運(yùn)動控制
DMC5400運(yùn)動控制卡提供的單軸運(yùn)動控制模式有梯形速度曲線運(yùn)動模式、S形速度曲線運(yùn)動模式和連續(xù)運(yùn)動模式,為降低運(yùn)動過程中的速度波動以及簡化編程,這里采用S形速度曲線運(yùn)動模式。
d5400_s_pmove(WORD axis,long Dist,WORD posi_mode);其中,axis表示軸號,Dist表示運(yùn)動距離,posi_mode表示坐標(biāo)模式。
(2)多軸運(yùn)動模式
多軸運(yùn)動模式是指DMC5400運(yùn)動控制卡提供直線插補(bǔ)運(yùn)動、圓弧插補(bǔ)運(yùn)動和連續(xù)插補(bǔ)運(yùn)動。由于本控制系統(tǒng)對空間運(yùn)動軌跡沒有要求,因此這里采用最簡單的直線插補(bǔ)運(yùn)動。
d5400_t_line2(WORD axis1,long Dist1,WORD axis2,long Dist2,WORD posi_mode);其中,axis1、axis2表示第一、二軸軸號,Dist1、Dist2表示第一、二軸運(yùn)動距離,posi_mode表示坐標(biāo)模式。
4.3 實(shí)驗(yàn)及結(jié)果
坐標(biāo)平臺的主要精度指標(biāo)是重復(fù)定位精度[9],為測定其重復(fù)定位精度,選定運(yùn)動過程中的零點(diǎn)、測量槽以及清洗處三個點(diǎn),按給定的速度、加速時間,讓X、Y、Z三軸重復(fù)運(yùn)動運(yùn)動30次,并測量其誤差,并取所測數(shù)據(jù)的平均值與三倍均方值為其精度,如表1所列。由表1可知直角坐標(biāo)平臺的重復(fù)定位精度最大為0.312 mm,遠(yuǎn)高于血型分析儀中使用的試管最小直徑6 mm,能夠滿足實(shí)際使用過程中對抽放樣裝置針頭的定位要求,實(shí)現(xiàn)了對血型分析儀自動加樣機(jī)械臂的自動控制。
5 結(jié)語
臨床上使用血型分析儀快速分析病人血液樣本的血型及理化性質(zhì)對于及時診斷病情具有重要意義,筆者基于DMC5400運(yùn)動控制卡設(shè)計了面向血型分析儀的自動加樣機(jī)械臂控制系統(tǒng)。通過大量實(shí)際測試,該控制系統(tǒng)不僅能實(shí)現(xiàn)快速加樣,而且減少了人工操作,避免了人為因素的隨機(jī)性,使檢測更可靠。后續(xù)工作將采用可編程控制器代替PC,以減小該系統(tǒng)的體積并控制成本,使該系統(tǒng)的實(shí)際應(yīng)用更為廣泛。

表1 坐標(biāo)平臺的重復(fù)定位精度
[1]秦紅星.對血液細(xì)胞圖像自動分割的研究[D].重慶:重慶大學(xué),2004.
[2]Sean Graves,Bill Holman,Manuel Rossetti,et al.Robotic Automation of Coagulation Analysis[J].Clinica Chimica Acta,1998,278(2):269-279.
[3]羅剛銀.全自動血型分析系統(tǒng)關(guān)鍵技術(shù)的研究[D].長春:中國科學(xué)院長春光學(xué)精密機(jī)械與物理研究院,2012.
[4]李德亮,舒志兵.基于運(yùn)動控制板卡的電路板鉆孔機(jī)控制系統(tǒng)設(shè)計[J].機(jī)床與液壓,2012,40(8):131 -133.
[5]孔慧勇.基于運(yùn)動控制卡的全閉環(huán)控制系統(tǒng)研究[D].成都:四川大學(xué),2003.
[6]王 敏,邵定宏,陸金桂.動態(tài)鏈接庫技術(shù)及其應(yīng)用實(shí)例[J].微計算機(jī)信息,2006,22(9):272 -274.
[7]吳 琳,崔洪亮,信 東,等.基于伺服電機(jī)和運(yùn)動控制器的目標(biāo)仿真實(shí)時性控制研究[J].電子產(chǎn)品世界,2006(6):26-28.
[8]張學(xué)文.四自由度教學(xué)型機(jī)器人運(yùn)動軌跡控制技術(shù)研究[D].重慶:重慶大學(xué),2009.
[9]吳嵐軍,閆獻(xiàn)勇,張春野,等.DY-2003生物芯片點(diǎn)樣儀的研制[J].現(xiàn)代科學(xué)儀器,2004(2):24-30.