基于標定板特征的攝像機線性標定方法研究
2013-06-21 09:03:40楊進華
長春大學學報 2013年8期
趙 群,楊進華
(長春理工大學 光電工程學院,長春 130022)
0 引言
機器視覺的一個主要目標是從攝像機獲取的圖像信息出發(fā)計算三維空間中物體的幾何信息,并由此重建和識別物體。空間物體表面某點的三維幾何位置與其在圖像中對應點之間的關系由攝像機成像幾何模型決定,攝像機標定就是確定這種幾何模型參數(shù)的過程。幾何模型參數(shù)包括內部參數(shù)和外部參數(shù)兩類,攝像機內部參數(shù)是由攝像機內部幾何和光學特性決定的,主要包括焦距f和主點坐標(u0,v0),還有鏡頭畸變的各類畸變系數(shù)等。攝像機外部參數(shù)是指攝像機坐標系相對世界坐標系的位姿關系,包括旋轉矩陣R和平移向量t。
攝像機標定方法大致可分為兩大類:傳統(tǒng)攝像機標定法和攝像機自標定法。自標定法雖然不需要空間場景的三維幾何信息,僅僅利用攝像機獲取的圖像中的信息就可以確定攝像機的內部參數(shù),但是需要控制攝像機做嚴格運動,實驗要求比較高,穩(wěn)定性差。傳統(tǒng)標定法典型算法有直接線性法[1]、非線性優(yōu)化法[2]、Tsai兩步法[3]、Zhang的平面法[4]等。其中直接線性法由于不考慮鏡頭畸變,精度較低;非線性優(yōu)化算法比較繁瑣,速度慢,且對初值選擇依賴性較大,如選擇不當,很難得到正確結果;Tsai兩步法和Zhang的方法均先用線性法求出部分參數(shù),而在考慮鏡頭畸變中也引入了非線性優(yōu)化。本文提出一種考慮了鏡頭畸變的線性標定法,避免了非線性優(yōu)化,對主點坐標、縱橫比、有效焦距、一階徑向畸變系數(shù)等5個內部參數(shù)以及旋轉矩陣和平移向量的6個外部參數(shù)進行了標定。實驗證明本文提出的算法精度較高。
1 攝像機模型
空間任何一點P在圖像上的成像位置可以用針孔模型近似表示,即點P在圖像上的投影位置為光心Oc與P點連線OcP與圖像平面的交點Pu,這是理想的透視投影模型。在實際中由于攝像機鏡頭光學系統(tǒng)的加工誤差和裝配誤差,攝像機像面上的實際成像與理想成像之間存在光學畸變誤差。主要畸變有徑向畸變、偏心畸變和薄棱鏡畸變,在工業(yè)視覺中一般只需要對徑向畸變進行校正,Tsai[3]指出,在對攝像機進行標定的時如果考慮過多的非線性畸變會引入過多的非線性參數(shù),不僅不能提高標定精度,反而會引起解的不穩(wěn)定。因此我們采用一階徑向畸變的針孔模型。
如圖1所示該模型有四個坐標系:計算機圖像坐標系Ouv;圖像坐標系oxy;攝像機坐標系ocxcyczc;世界坐標系OwXwYwZw。
從世界坐標系到計算機圖像坐標系的變換分為如下4步[5]:

圖1 一階徑向畸變針孔模型
(1)世界坐標系與攝像機坐標系的變換,可以用旋轉矩陣R和平移向量t來描述:

(2)攝像機坐標系到理想圖像坐標系的變換:

(3)理想圖像坐標系與實際圖像坐標系的轉換,考慮一階徑向畸變,建立畸變模型:

式中,r2d=x2d+y2d,k1為一階徑向畸變系數(shù)。
(4)實際圖像坐標系到計算機圖像坐標系的轉換:

式中,(cx,cy)為主點坐標,(dx,dy)分別為圖像平面上x,y方向上單位像素間的距離,sx為圖像縱橫比。
2 基于SIFT算法求解HALCON定標板特征點的圖像坐標
本文采用MVTec公司的HALCON提供的標準標定模板(7×7),尺寸0.3m×0.3m,邊框內圓點的中心距為0.0375m,精度高達微米級。如圖2所示:
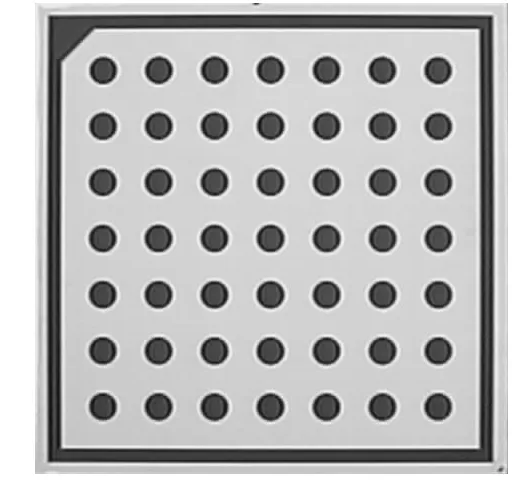
圖2 HALCON標定板
SIFT(the Scale Invariant Feature Transform)算法[6,7]是David G.Lowe提出的一種基于尺度空間、對圖像放縮、旋轉甚至仿射變換保持不變性的特征點提取算法。首先求出標定板圖像的高斯尺度空間,通過變換不同的空間尺度因子,進行多尺度空間的極值點檢測,即可較穩(wěn)定獲得標定板邊框內各個特征中心點的亞像素坐標。實驗所得圖3如下:
如圖3(b)所示,十字亮線代表已經獲取到的特征點的中心坐標。在拍攝時,最好保證標定板和平臺垂直且正對相機鏡頭,使得標定板上的特征點在攝像機坐標系下的z坐標值相同,以確保標定工作的順利進行。
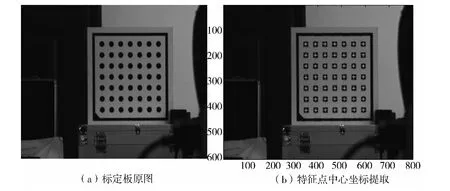
圖3 標定板原圖及特征點中心坐標提取
3 攝像機內外部參數(shù)的線性求解
3.1 標定圖像主點坐標
本文采用直接光學法[8-9]。標定原理如圖4所示:
激光光束射向鏡頭表面,大部分光透過鏡頭,部分光由鏡頭各表面反射。當激光光束與鏡頭不同軸時,在激光束出射光闌面上可觀察到由反射光束形成的多個不同位置的彌散斑。此時調整激光束相對鏡頭的位置,當所有彌散斑剛好和出射光闌小孔重合時,認為激光束與鏡頭光軸重合。然后在鏡頭前的光軸上放一定倍率的衰減片,打開CCD相機,激光束在CCD像面上的像點即為鏡頭光學成像中心。通過求光斑圖像的質心坐標,便為主點坐標(u0,v0)。
3.2 標定縱橫比
由于攝像機焦距同時在x和y方向上縮放圖像,所以垂直拍攝一個圓環(huán),然后計算其在水平方向和垂直方向上的像素直徑比即為縱橫比sx。
3.3 求解旋轉矩陣R和平移分量tx、ty
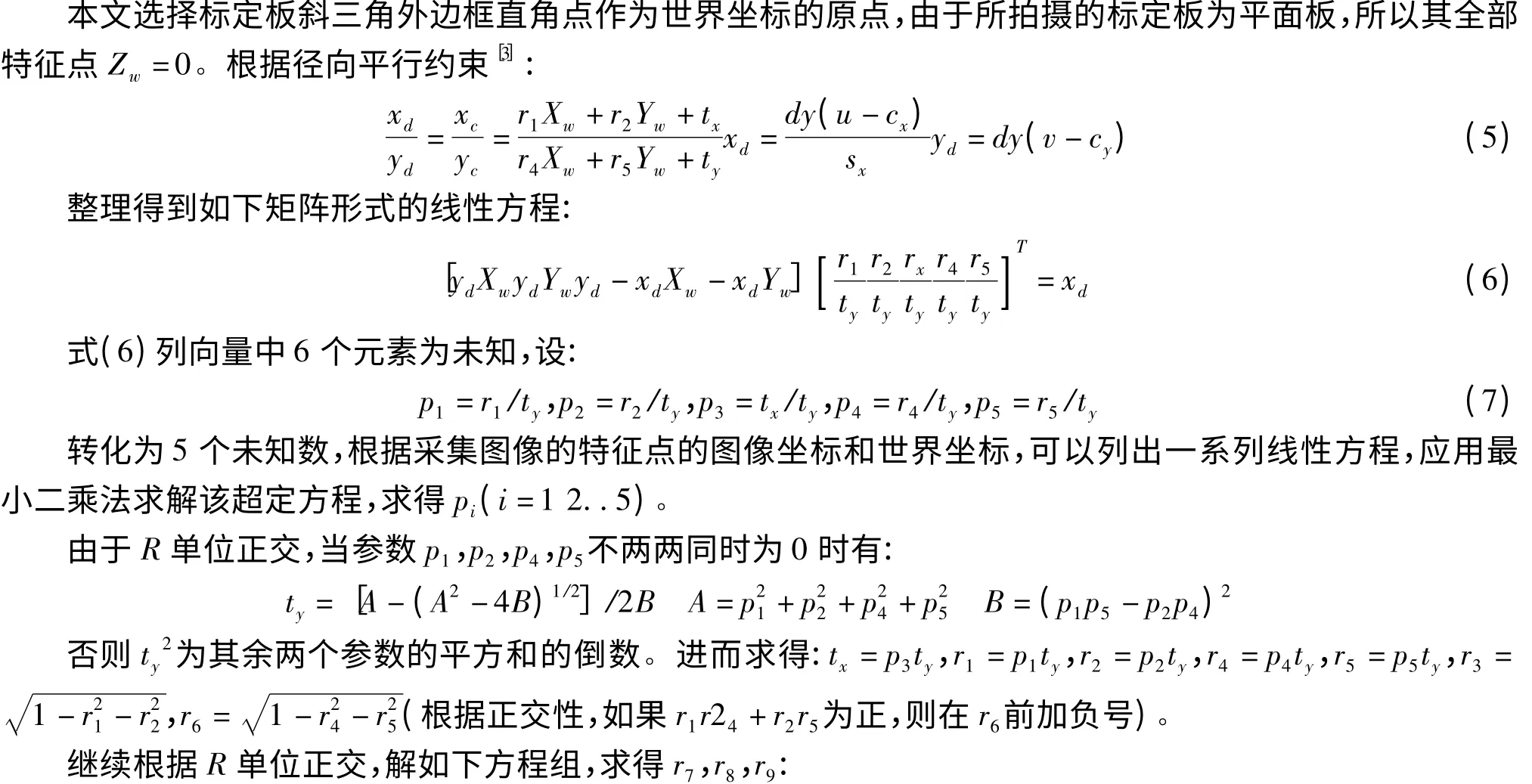

圖4 直接光學法

3.4 求解焦距f、一階徑向畸變系數(shù)k1和平移分量tz
由公式(1)(2)(3)聯(lián)合得:

同樣整理成含有f、k1和tz的線性方程:

式中,E=r1Xw+r2Yw+tz,F(xiàn)=r4Xw+r5Yw+tz,G=r7Xw+r8Yw,k=fk1
最后將(10)式中的兩個方程合成一個線性方程組,用最小二乘法求解f、k1和tz三個參數(shù)的值。
4 實驗結果及分析
實驗采用分辨率為13001024pixel、像元大小4.65μm的OK-AC1300型號相機,工作輸出8bitRGB圖像,鏡頭為35mm定焦鏡頭。實際采集HALCON標定板圖像大小為800600pixel,其特征點總數(shù)為49個,如圖(3)所示。通過計算其圖像坐標和世界坐標,按3節(jié)步驟進行標定,出現(xiàn)了隨著測試點個數(shù)的變化焦距f不穩(wěn)定的現(xiàn)象,如下圖5所示:

圖5 焦距f變化曲線
經過多次實驗,焦距的變化很大程度上受平移分量tz的影響,由于參加計算的測試點的個數(shù)不同使得tz也隨著變化,從而導致的焦距f不穩(wěn)定。因此實驗采用激光相位測距儀測量CCD像面到標定板的垂直距離,即tz。并對原算法提出改進,將(9)式修改為:

重新計算后得到焦距隨著測試點的變化在f=35mm附近得到較好的收斂。如圖6所示:

圖6 標定t z(紅線)與未標定t z(藍線)的焦距f變化曲線
本文采用測試點的真實圖像坐標與再投影后相應的圖像坐標之差的模平均值來描述[10],單位pixel,公式如下:

其中(ui,vi)為測試點的真實圖像坐標,(ui',vi')為再投影后的圖像坐標,n為測試點數(shù)。
利用本文算法得到標定結果,如表1所示。

表1 攝像機線性標定數(shù)據
實驗選擇30個特征點作為標定點,其余19個作為測試點。進行誤差分析后得EAVG=0.8376pixel,可見本文標定精度較高,從焦距的標定值和所用鏡頭焦距的設計值對比,也可得到驗證。
5 結語
本文提出一種簡單有效的攝像機線性標定法。選用高精度的HALCON標定板作為標定模板,用需要標定的CCD攝像機對其進行一次性拍攝,并應用SIFT算法提取標定板圖像的有效特征點坐標,達到了亞像素精度。最后分步完成了攝像機的全部參數(shù)線性標定,避免了非線性優(yōu)化的繁瑣。標定過程中,由于受標定結果tz變化的影響,導致結果中焦距f等一些參數(shù)不穩(wěn)定,因此本文對原算法進行了改進,將tz獨立出來進行標定,從而使標定結果中焦距f獲得較好的收斂性。實驗表明本文標定精度較高,適合大多數(shù)攝像機標定,在機器視覺領域有廣泛的應用價值。
[1]Y I Abdel-Aziz,H M Karara.Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry[C].In:Proceedings of the ASP Symposium on Close-Range Photogrammetry,Urbana,Illinois,1971:1-18.
[2]吳福朝,阮宗才,胡占義.非線性模型下的攝像機自標定[J].計算機學報,2002,25(3):276-283.
[3]Roger Y.TSAI.A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV camera and lenses[J].IEEE Journal of Robotics and Automation,1987,3(4):323-334.
[4]Zheng-you ZHANG.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
[5]徐杰.機器視覺中攝像機標定Tsai兩步法的分析與改進[J].計算機工程與科學,2010,32(4):45-48,58.
[6]Lowe,D.G.Object Recognition from Local Scale-Invariant Features[C].In Process of the International Conference on Computer Vision,Corfu,Greece,1999:1150-1157.
[7]Lowe,D.G.Distinctive image features from scale-invariant key-points[J].International Journal of Computer Vision,2004,60(2):91-110.
[8]Lenz Reimar K,Tsai Ronger Y.Techniques for calibration of the scale factor and image center for high accuracy 3D machine vision metrology[J].IEEE Transaction on Pattern Analysis and Machine Intelligence,1988,10(5):713-720.
[9]王峰,周仁魁,楊小許,等.CCD攝像機圖像中心兩種標定方法的應用研究[J].光子學報,2006,35(2):294-298.
[10]張穎.一種攝像機亞象素線性標定方法[J].計算機工程與應用,2007,43(9):56-58.
