太陽光實時復合跟蹤系統(tǒng)的研究
2013-06-21 09:03:08曹健寧
長春大學學報 2013年4期
曹健寧,王 菲
(長春理工大學 光電工程學院,長春 130022)
在科技與經(jīng)濟高速發(fā)展的今天,能源已經(jīng)成為至關(guān)重要的條件之一。然而,地球上很多不可再生資源已經(jīng)消耗殆盡,所以發(fā)現(xiàn)和利用新能源已經(jīng)成為了人們關(guān)注的重要問題。近些年,太陽能的發(fā)展越來越受到人們的關(guān)注,其清潔環(huán)保、取之不盡用之不竭等諸多優(yōu)點倍受人們的青睞[1]。
早在90年代初期,德國和美國等一些發(fā)達國家就已經(jīng)研制出簡單的太陽能跟蹤系統(tǒng),并且推出了太陽能廚房。不過那時的太陽能跟蹤裝置只是東西方向的單軸運轉(zhuǎn),南北方向只能通過手動調(diào)節(jié),極為不便并且精度不夠,對太陽光的利用率也不高[2]。但是在2006年,Accion公司建立了西班牙最大的太陽能電站,整個裝置包含了400個太陽能跟蹤托盤,14400個太陽能電池板,能夠根據(jù)太陽的不同位置全天跟蹤太陽光,到目前為止達到了世界的先進水平[3]。在我國,早在1992年也已經(jīng)推出了太陽灶自動跟蹤系統(tǒng)。近些年,太陽光已經(jīng)廣泛應用于我國各個領(lǐng)域,國家氣象局研制的FST全自動太陽光跟蹤器,成功的應用于太陽輻射的觀測。太陽能熱水器,太陽能電池板已經(jīng)成功的進入了個人家,為人們儲存熱量或者發(fā)電[4]。因此,我國的太陽能技術(shù)也已經(jīng)站在了世界的先進水平行列。
不過,對于太陽能的利用還存在著很多不妥的地方,跟蹤精度不高,跟蹤條件受天氣的影響等很多因素降低了太陽能的利用率。我們設計了一種結(jié)構(gòu)簡單、成本低、利用率較高、長期穩(wěn)定的太陽光實時跟蹤系統(tǒng)。該系統(tǒng)可以對多種天氣下的太陽光進行準確的跟蹤,可保證較大的光電轉(zhuǎn)換率。
1 系統(tǒng)設計的總體方案
太陽光跟蹤系統(tǒng)主要是由光電轉(zhuǎn)化模式和太陽光運行軌道跟蹤模式兩種跟蹤系統(tǒng)組成,可加強系統(tǒng)的穩(wěn)定性、提高太陽光利用率。晴天時,先啟動太陽光軌道跟蹤,使裝置大致對準太陽光的方向,達到探測器的跟蹤范圍。再啟動光電跟蹤,對太陽光進行精確定位。陰天時,系統(tǒng)啟用太陽光軌道跟蹤模式繼續(xù)跟蹤,當天氣陰轉(zhuǎn)晴時,系統(tǒng)又再次轉(zhuǎn)入光電跟蹤。
該系統(tǒng)的光電跟蹤系統(tǒng)主要是用四象限探測器做為接收裝置,以C8051F040單片機作為核心,將接收到的太陽光光信號轉(zhuǎn)化成電信號后,進行放大、濾波,輸入到單片機中進行處理,由單片機輸出驅(qū)動信號控制步進電機做出相應的跟蹤運轉(zhuǎn)。圖1是該系統(tǒng)的基本原理框圖。
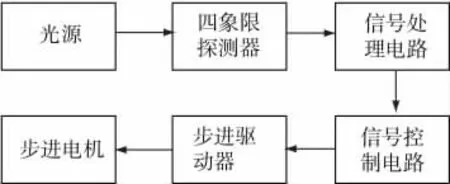
圖1 系統(tǒng)基本原理圖
太陽運行軌道跟蹤模式根據(jù)太陽運行軌跡來跟蹤太陽光,太陽軌跡位置由被測地點的經(jīng)度、緯度和標準時間來確定。在經(jīng)過大量的實驗和總結(jié)后,如果采用太陽光軌道跟蹤有4種參數(shù)是最為重要的。分別是太陽赤緯角δ,太陽時角ψ,太陽高度角H和太陽方位角T。
在設定跟蹤地點和基準零點后,前兩種參數(shù)有固定的公式可以很容易的計算出具體數(shù)值,后兩種參數(shù)太陽的高度角和方位角是由控制系統(tǒng)按照太陽的地平坐標公式自動運算,然后太陽每分鐘角度變化的數(shù)據(jù)傳輸?shù)膯纹瑱C中,由單片機發(fā)送驅(qū)動信號,對太陽光進行高度和方位雙軸的跟蹤。天黑后,系統(tǒng)自動停止跟蹤。
2 探測器的選擇
光電跟蹤模式中,傳感器的選擇極為重要,它關(guān)系到整個系統(tǒng)的跟蹤精度和準確性。我們選用GT111型四象限光電探測器,其本身為N型設計,密封陶瓷封裝,擁有六只管腳,一只接地,一只接偏壓,另外四只管腳分別接四象限探測器的四個光敏二極管。它具有光敏面積大、響應速度快、可靠性高、精確度較高等優(yōu)點,十分適用于本系統(tǒng)[5]。
2.1 四象限探測器的工作原理
四象限探測器是由四個性能完全相同的光敏電阻按照直角坐標的要求排列成四個象限坐落在一個芯片上,當太陽光照射其表面時,每個象限所受到的光照面積的大小與每個象限中光敏電阻所輸出的電流的大小是成正比的,當四個象限光照強度相同時,四個光敏電阻所輸出的電流信號是相同的。當四個象限的光照強度不同時,四個象限的光敏電阻所輸出的電信號就會有明顯的差異[6]。由此可以推斷出目標方位并進行跟蹤。
2.2 光斑半徑取值范圍的研究
光斑的大小和四象限探測器有效面積的大小直接影響探測器輸出電流變化,并形成有效測量范圍,如果光斑的取值不當,探測器不能有效的利用太陽光,那么會直接影響系統(tǒng)對太陽光跟蹤的精度和準確性[7]。下面對光斑的取值范圍做一下討論。
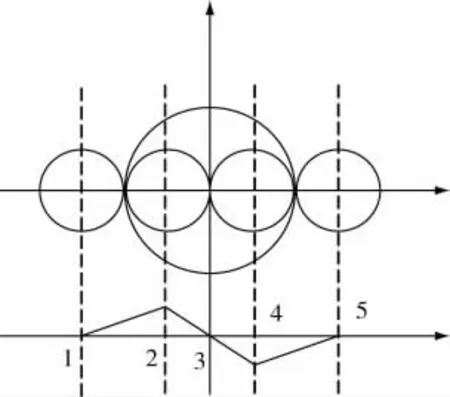
圖2 光斑直徑與四象限探測器的半徑相同
如圖2所示[8],當光斑處于l時,探測器沒有電流輸出。當光斑向右移動時,探測器電流輸出漸漸增大。當光斑移動到2時,此時的電流輸出最大。當光斑過了2處繼續(xù)向右移動,那么二、三象限的照射面積就開始減少,電流輸出也同時開始減少,一、四象限內(nèi)負值電流開始增加,當光斑移動到3處時,光斑照射在四個象限的面積相等,探測器這時輸出為零,誤差值為零。如果再向右移動,一、四象限的照射面積就會大于二、三象限的照射面積,電流輸出值為負值。直到光斑移動到4處,一個完整的光斑就照射在一、四象限,探測器的電流輸出達到負的最大值。當光斑繼續(xù)向遠端移動,探測器的輸出電流逐漸變小,移至5處探測器輸出為零。
圖3、圖4[8]分別是光斑直徑小于和大于四象限探測器半徑的示意圖,不難看出這兩種情況在2-3,5-6范圍內(nèi)都有一段直線,都沒有充分的利用太陽光,所以跟蹤的靈敏度都被很大程度上的降低了。
綜上所述,當光斑直徑等于探測器的半徑時時,即充分利用了光照能量,又獲得較大的有效測量輸出電流變化的范圍,所以是最佳的選擇。
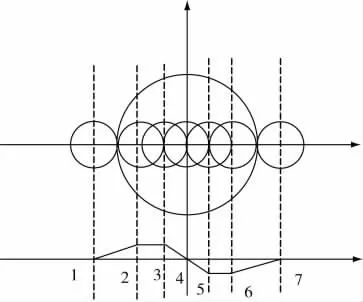
圖3 光斑直徑小于四象限探測器的半徑
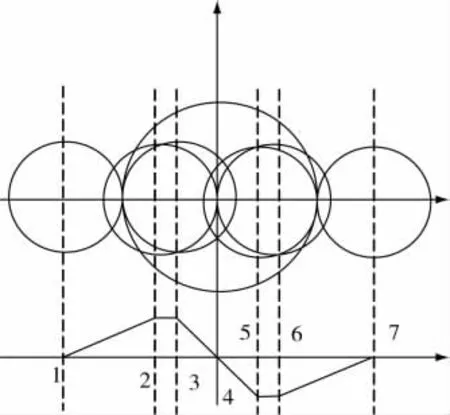
圖4 光斑直徑大于四象限探測器的半徑
3 系統(tǒng)硬件設計
該系統(tǒng)的硬件電路主要是由放大電路、濾波電路、單片機C8051F040、步進電機驅(qū)動、步進電機、LED顯示、按鍵、時鐘等所組成。首先設計出硬件電路的原理框圖。如圖5所示。

圖5 系統(tǒng)硬件框圖
在整個硬件系統(tǒng)中,選取的單片機是C8051F040,其本身具有可靠性高、運算速度快、擴展功能強等優(yōu)點,完全滿足于本系統(tǒng)的要求。我們設計一個接收裝置,將接收到的太陽光形成一個直徑與四象限探測器半徑相等的圓形光斑,原因前面已經(jīng)進行了分析,這里不再重復。當太陽光照到探測器上時,探測器會輸出四路微弱的光電流,要用放大器將信號放大。
由于在探測器輸出的信號中存在著電壓的紋波、光響應度、感光面積、暗電流和結(jié)電容等參數(shù),這會直接影響到單片機對步進電機的控制,導致單片機不能輸出精確的信號。所以,在將信號放大后我們需要一個低通濾波器,在信號進入單片機之前,處理掉電壓的紋波,保證電路的正確運行。
信號進入C8051F040單片機。經(jīng)過單片機的數(shù)據(jù)處理,給出太陽的方位角和高度角的電壓偏差信號(也就是太陽光斑偏離中心的距離),通過單片機控制步進機的轉(zhuǎn)動使兩個角度的電壓偏差值趨于零,這樣就會達到太陽光實時跟蹤的目的。存貯芯片我們選用的是AT24C32,它可以保存每一時刻探測器輸出信號的數(shù)據(jù)。如果發(fā)生突然斷電這種意外,該芯片仍然可以保存斷電前一刻的太陽方位角和太陽高度角的數(shù)值,以便再次正常工作時可以用來作比較,計算兩次的角度差值,對步進電機進行控制,能夠精確的跟蹤太陽光。
4 系統(tǒng)的軟件設計
如圖6所示為系統(tǒng)的軟件流程圖。
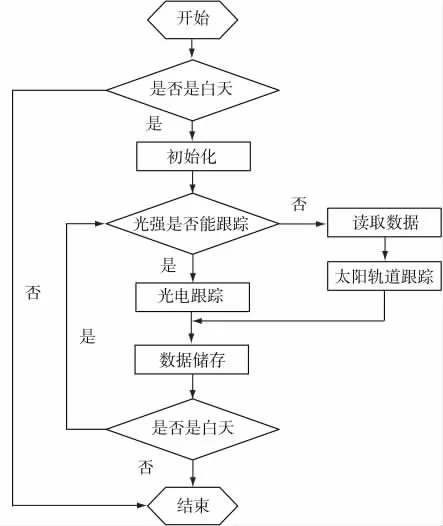
圖6 系統(tǒng)軟件流程圖
接通電源之后,系統(tǒng)會判定是否在正常的工作時間段內(nèi),如果是夜晚則該系統(tǒng)自動結(jié)束。如果是白天,系統(tǒng)自動進行初始化,這里包括看門狗電路。系統(tǒng)先進行太陽光軌道跟蹤,單片機自動計算太陽的高度角、方位角,對太陽進行粗定位,使其達到光電跟蹤的范圍。隨后系統(tǒng)進行光電跟蹤模式,將接收到的微弱光電流進行I/V轉(zhuǎn)換、放大、濾波,輸入到單片機中進行處理,給出控制信號來控制步進機對太陽的方位和高度進行精確的跟蹤。
5 結(jié)語
本文提出了一種太陽光實時跟蹤系統(tǒng),該系統(tǒng)采用光電跟蹤和太陽光軌道跟蹤兩種跟蹤模式。光電跟蹤部分以單片機C8051F040為控制核心,通過四象限光電探測器對太陽光進行接收裝換,由處理電路進行放大、濾波,最后由單片機輸出電機驅(qū)動信號,控制步進電機運轉(zhuǎn)。太陽光軌道跟蹤則是由系統(tǒng)自動計算太陽的高度角、方位角等相關(guān)參數(shù),對太陽進行定位,由控制系統(tǒng)根據(jù)太陽每一時刻的角度變化來發(fā)送驅(qū)動信號,實現(xiàn)太陽光跟蹤。兩種跟蹤模式相互補充,不需要過多的控制,運行穩(wěn)定,跟蹤精度高。可廣泛應用于地下建筑、無窗建筑、礦業(yè)和勘探等場合,為提高太陽光利用率提供了重要的依據(jù)。
[1]日本太陽能學會編.太陽能的基礎(chǔ)和應用[M].上海:上海科學技術(shù)出版社,1982.
[2]Soteris A Kalogirou.Design and construction of one ax is sun tracking system[J].Solar Energy,1996,57(6):465-469.
[3]高春燕,李俊民,劉彬彬.Visual Basic程序開發(fā)范例寶典[M].北京:人民郵電出版社,2006.
[4]徐問燦,袁俊,嚴偉,等.太陽能自動跟蹤系統(tǒng)的探索與實驗[J].物理實驗,2003,23(9):45-48.
[5]胡勛良,強建科,余招陽.太陽能光跟蹤器及其在采光中的應用[J].電子技術(shù),2003,30(12):8-10.
[6]Ernesto.Doebelin.measurement systems application and design[M].北京:機械工業(yè)出版社,2005.
[7]徐科軍.傳感器與檢測技術(shù)[M].2版.北京:電子工業(yè)出版社,2008.
[8]劉樂善.微型計算機接口技術(shù)及應用[M].武漢:華中科技大學出版社,2000.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
