剛-柔性機(jī)械臂動(dòng)力學(xué)建模及其動(dòng)力學(xué)特性研究
2013-07-07 15:39:57郭振鋒金國(guó)光暢博彥
天津工業(yè)大學(xué)學(xué)報(bào) 2013年1期
郭振鋒,金國(guó)光,暢博彥,王 艷
(1.天津工業(yè)大學(xué)機(jī)械工程學(xué)院,天津 300387;2.天津工業(yè)大學(xué)天津市現(xiàn)代機(jī)電裝備技術(shù)重點(diǎn)實(shí)驗(yàn)室,天津 300387)
剛-柔性機(jī)械臂動(dòng)力學(xué)建模及其動(dòng)力學(xué)特性研究
郭振鋒1,2,金國(guó)光1,2,暢博彥1,2,王 艷1,2
(1.天津工業(yè)大學(xué)機(jī)械工程學(xué)院,天津 300387;2.天津工業(yè)大學(xué)天津市現(xiàn)代機(jī)電裝備技術(shù)重點(diǎn)實(shí)驗(yàn)室,天津 300387)
根據(jù)假設(shè)模態(tài)法,對(duì)剛-柔性機(jī)械臂系統(tǒng)進(jìn)行了位形表達(dá)及運(yùn)動(dòng)學(xué)分析.基于Kane方程,建立了剛-柔性機(jī)械臂系統(tǒng)的動(dòng)力學(xué)模型.數(shù)值仿真結(jié)果表明,截取前二階模態(tài)即可滿足剛-柔性機(jī)械臂系統(tǒng)的精度要求;分析了柔性機(jī)械臂的結(jié)構(gòu)參數(shù)、材料參數(shù)和驅(qū)動(dòng)力矩對(duì)其動(dòng)力學(xué)特性的影響.研究結(jié)果表明:通過采用矩形截面,采用較大彈性模量的材料,減小外部施加的驅(qū)動(dòng)力矩,避免驅(qū)動(dòng)力矩產(chǎn)生突變,可以有效地提高剛-柔性機(jī)械臂系統(tǒng)的動(dòng)力學(xué)性能.
柔性機(jī)械臂;模態(tài)分析;Kane方程;動(dòng)力學(xué)特性
柔性機(jī)械臂是一個(gè)高度非線性、強(qiáng)耦合、時(shí)變的動(dòng)力學(xué)系統(tǒng).與剛性機(jī)械臂相比較,柔性機(jī)械臂具有精度高、質(zhì)量輕、操作空間大、成本低等優(yōu)點(diǎn),這使得柔性機(jī)械臂在精密儀器、航空航天等領(lǐng)域應(yīng)用越來越廣泛.但是,由于柔性機(jī)械臂在運(yùn)動(dòng)過程中會(huì)產(chǎn)生彎曲、剪切等彈性變形,引起機(jī)械臂末端彈性變形誤差,從而影響機(jī)械臂的工作精度.Korayem等[1]用有限元法和拉格朗日方程建立了二自由度柔性機(jī)械臂的動(dòng)力學(xué)模型;王斌銳等[2]基于假設(shè)模態(tài)法和Lagrangian原理建立了綜合考慮關(guān)節(jié)和桿件柔性的剛?cè)狁詈蟿?dòng)力學(xué)方程;金國(guó)光等[3]用有限元法對(duì)柔性曲線梁離散化處理并應(yīng)用Kane方程建立了動(dòng)力學(xué)模型;Vakil等[4]結(jié)合假設(shè)模態(tài)方法和拉格朗日方程對(duì)雙柔性機(jī)械臂進(jìn)行動(dòng)力學(xué)建模;裴希伍等[5]基于假設(shè)模態(tài)法、拉格朗日法和系統(tǒng)動(dòng)量守恒對(duì)柔性連桿進(jìn)行近似描述,忽略高階彈性振動(dòng)模態(tài),推導(dǎo)了一種自由浮動(dòng)空間柔性機(jī)械臂操作剛性有效載荷的動(dòng)力學(xué)模型;崔玲麗等[6]應(yīng)用有限差分法和有限元法建立了勻質(zhì)單連桿柔性機(jī)械臂系統(tǒng)的模型;代小林等[7]運(yùn)用凱恩方程推導(dǎo)了并聯(lián)運(yùn)動(dòng)平臺(tái)的多剛體動(dòng)力學(xué)模型;孫占庚等[8]采用假設(shè)模態(tài)法和凱恩方程對(duì)建立了單自由度柔性臂的模型.本文基于假設(shè)模態(tài)法并結(jié)合Kane方法對(duì)剛-柔性機(jī)械臂系統(tǒng)進(jìn)行動(dòng)力學(xué)建模,并應(yīng)用Matlab軟件對(duì)其進(jìn)行了仿真研究;根據(jù)仿真結(jié)果研究該系統(tǒng)的動(dòng)力學(xué)特性,并分析影響彈性振動(dòng)的因素.
1 剛-柔性機(jī)械臂動(dòng)力學(xué)建模
在對(duì)剛-柔性機(jī)械臂進(jìn)行動(dòng)力學(xué)建模之前,作如下假設(shè):
(1)只考慮柔性機(jī)械臂的橫向振動(dòng),忽略其軸向變形和剪切變形;
(2)柔性機(jī)械臂橫向變形為小變形;
(3)柔性機(jī)械臂的長(zhǎng)度遠(yuǎn)大于其截面尺寸.
在水平面內(nèi)作回轉(zhuǎn)運(yùn)動(dòng)的剛-柔性機(jī)械臂系統(tǒng)如圖1所示.
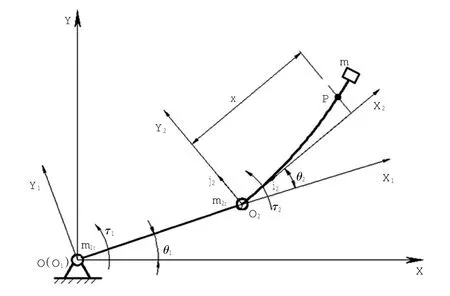
圖1 剛-柔性機(jī)械臂的物理結(jié)構(gòu)模型Fig.1 Rigid-flexible manipulators physical structure model
圖1中,桿1為剛性桿,桿2為柔性桿;關(guān)節(jié)O1、O2均為轉(zhuǎn)動(dòng)副.在t瞬時(shí),質(zhì)點(diǎn)P的橫向變形用u表示,則u是點(diǎn)P的坐標(biāo)和時(shí)間t的函數(shù),可記為u=u(x,t).設(shè)笛卡爾坐標(biāo)系OXY為該機(jī)械臂系統(tǒng)的固定坐標(biāo)系,坐標(biāo)系O1X1Y1和O2X2Y2為該系統(tǒng)上分別固連在桿1和桿2上的動(dòng)坐標(biāo)系.τ1、τ2分別為關(guān)節(jié)O1和關(guān)節(jié)O2處加載電機(jī)的驅(qū)動(dòng)力矩,m1r、m2r分別為關(guān)節(jié)O1和關(guān)節(jié)O2處電機(jī)的集中質(zhì)量,l1、l2分別為剛-柔性機(jī)械臂系統(tǒng)上桿1和桿2的長(zhǎng)度,h1、h2分別為桿1和桿2的截面高度,b1、b2分別為桿1和桿2的截面寬度,ρ1、ρ2分別為桿1和桿2的密度,m為柔性桿2末端所受的集中質(zhì)量,θ1、θ2分別為桿1和桿2的關(guān)節(jié)轉(zhuǎn)角.
點(diǎn)為柔性機(jī)械臂桿2軸線上的任一點(diǎn),u(x,t)為軸O2X2上距P點(diǎn)t時(shí)刻的橫向變形.根據(jù)機(jī)械振動(dòng)原理,均勻材料等截面梁彎曲自由振動(dòng)微分方程為[9]:

式中:ρ2為材料密度;A2為橫截面積;E2為材料的彈性模量;I2為截面慣性矩.
式(1)的解可表達(dá)為:

式中:Φi(x)為柔性桿2的第階振型函數(shù);qi(t)為與振型函數(shù)相對(duì)應(yīng)的模態(tài)坐標(biāo).
柔性機(jī)械臂的邊界條件為:
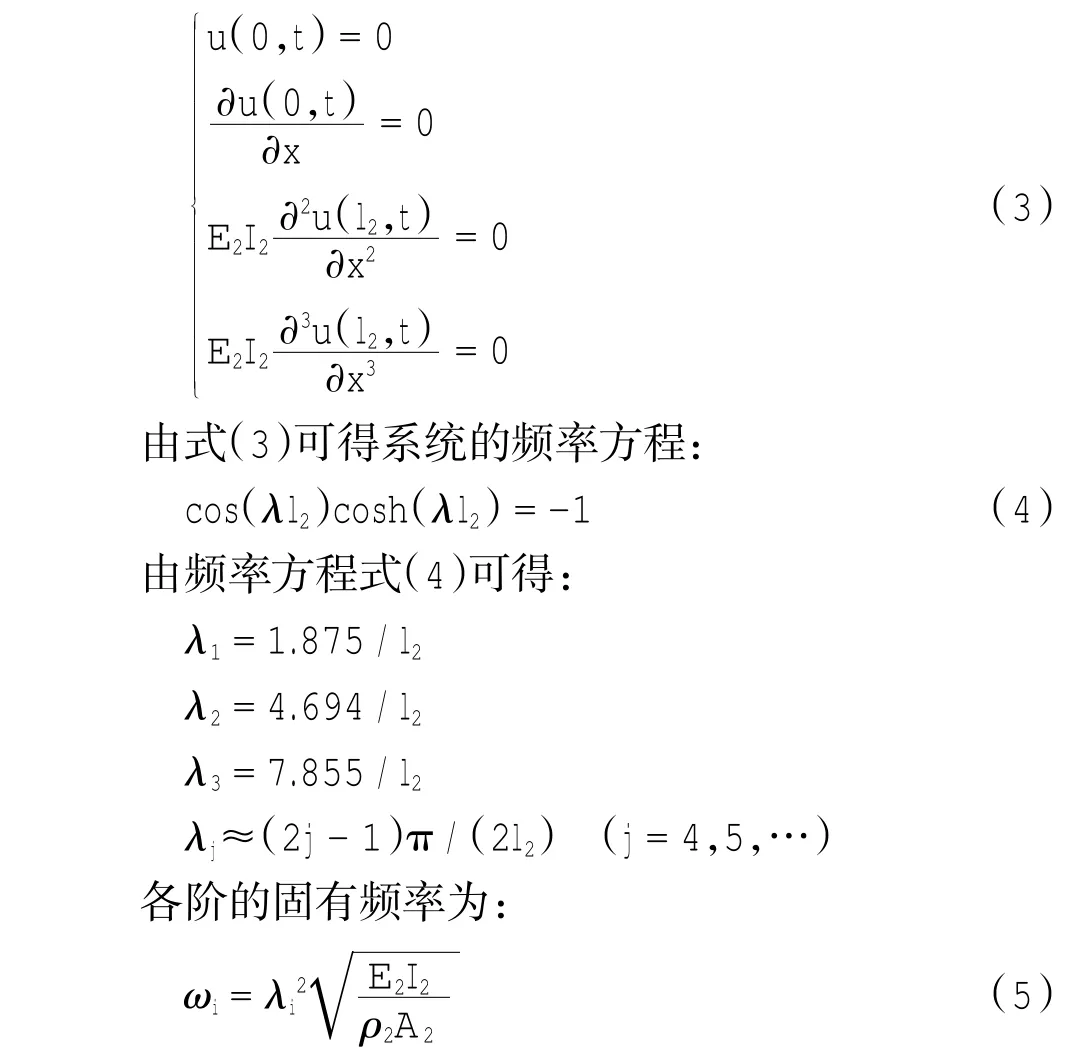
式中:i=1,2,3,….
將柔性機(jī)械臂的邊界條件(3)代入式(1),得到振型函數(shù):

在實(shí)際應(yīng)用中,一般取前n階模態(tài),同樣可以得到較高的精度,所以將u(x,t)寫成如下形式:

柔性機(jī)械臂在水平面內(nèi)的運(yùn)動(dòng)可以看作是大范圍剛體運(yùn)動(dòng)和小范圍彈性變形運(yùn)動(dòng)的疊加,因此P點(diǎn)位置在體坐標(biāo)系O2X2Y2中的坐標(biāo)(XP,YP)可表達(dá)為:

柔性桿2上任意一點(diǎn)P在變形后,在體坐標(biāo)系O2X2Y2中其位置矢量為:

式中:i2,j2分別為柔性桿2在體坐標(biāo)系O2X2Y2沿兩個(gè)坐標(biāo)軸的單位矢量.
若柔性機(jī)械臂上任意一點(diǎn)P小變形u(x,t)在體坐標(biāo)系O2X2Y2中的速度為UP,則柔性機(jī)械臂上任意一點(diǎn)P在慣性坐標(biāo)系OXY中的速度為:

式中:Ω2為柔性機(jī)械臂的角速度.
柔性機(jī)械臂內(nèi)力的廣義主動(dòng)力為:

式中:Ki為柔性機(jī)械臂桿2的模態(tài)剛度矩陣.
其中

對(duì)于剛-柔性機(jī)械臂系統(tǒng)外部施加的驅(qū)動(dòng)力和驅(qū)動(dòng)力矩的廣義主動(dòng)力:

對(duì)于剛-柔性機(jī)械臂系統(tǒng),應(yīng)用Kane方法對(duì)其建立動(dòng)力學(xué)方程,可得:

選取廣義速率為θ˙1,θ˙2,q˙i(t).進(jìn)行線性化處理,忽略耦合項(xiàng)和非線性項(xiàng),得到如下線性化方程
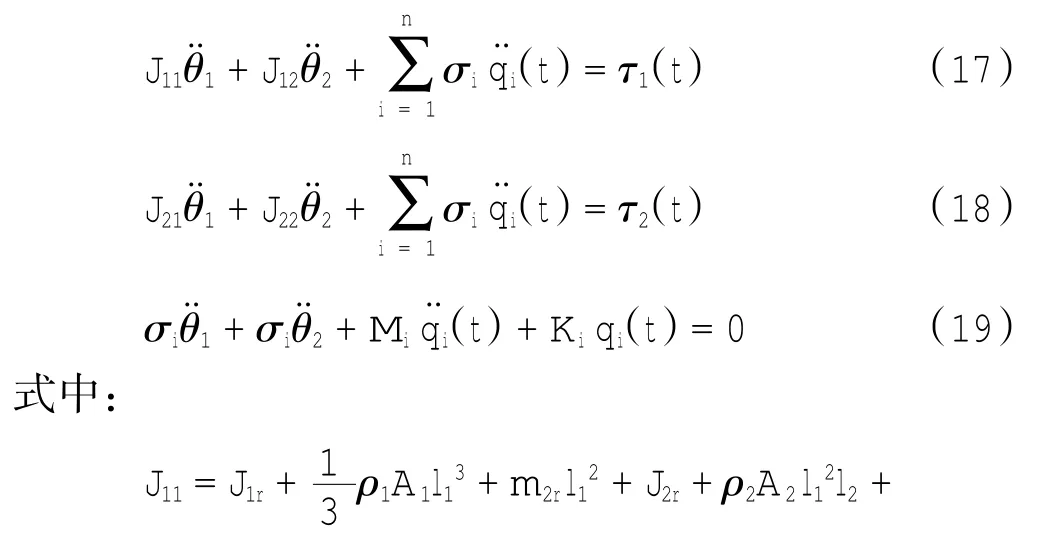
式中:J1r、J2r分別為電機(jī)轉(zhuǎn)子對(duì)關(guān)節(jié)O1和O2中心的轉(zhuǎn)動(dòng)慣量.將式(17)~式(19)寫成矩陣的形式,得到如下的方程式:
式(20)即為剛-柔性機(jī)械臂動(dòng)力學(xué)方程.
2 剛-柔性機(jī)械臂系統(tǒng)的仿真研究
圖1中,剛性桿1的長(zhǎng)度l1=1.0 m,密度ρ1=7 800 kg/m3,截面寬度b1=0.04 m,截面高度h1=0.04 m,材料為普通碳鋼.柔性桿2的密度ρ2=2 700 kg/m3,彈性模量E2=70 GPa,桿長(zhǎng)l2=2.0 m,截面寬度b2= 0.04 m,截面高度h2=0.04 m,鋁制材料.關(guān)節(jié)O2處電機(jī)的集中質(zhì)量m2r=1.0 kg,柔性機(jī)械臂末端集中質(zhì)量m=3.4 kg.關(guān)節(jié)O1處加載的力矩τ1=0.8 N·m,關(guān)節(jié)O2處加載的力矩τ2=(1-t)N·m.
初始條件:

仿真時(shí)間T=2 s.
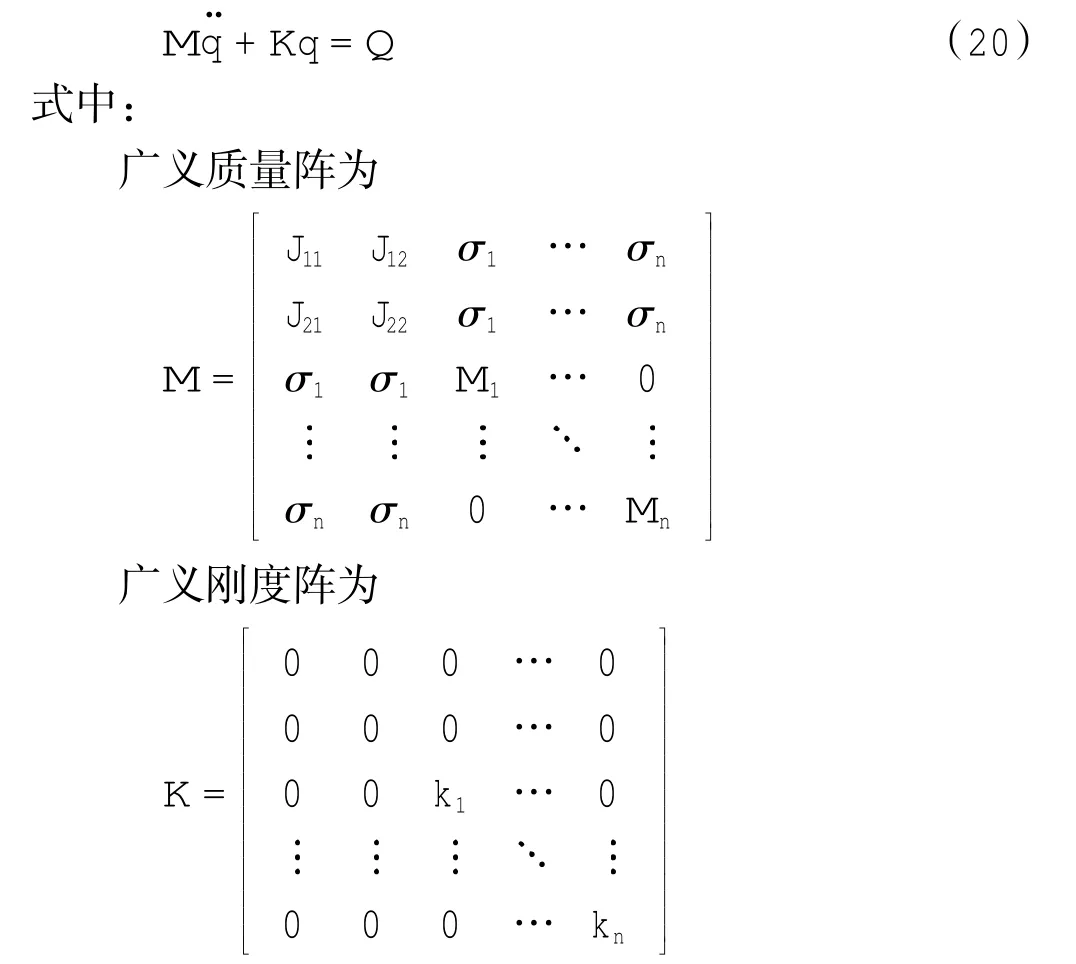
從理論上講,柔性機(jī)械臂的動(dòng)力學(xué)模型是連續(xù)無限維的,其中包括剛性大范圍運(yùn)動(dòng)以及無數(shù)個(gè)模態(tài)坐標(biāo).一般來講,對(duì)僅考慮柔性機(jī)械臂振動(dòng)的離散化動(dòng)力學(xué)方程,模態(tài)階數(shù)取得越多,其數(shù)值求解結(jié)果就越逼近實(shí)際情況.然而隨著模態(tài)階數(shù)的增加,求解的計(jì)算量就越大,這在實(shí)際應(yīng)用中是不必要的.分別取系統(tǒng)前一階模態(tài)、前二階模態(tài)和前三階模態(tài)作運(yùn)動(dòng)仿真,其仿真結(jié)果如圖2所示.
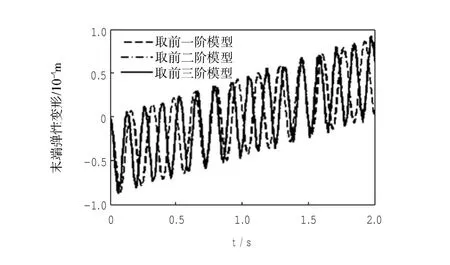
圖2 取不同階模態(tài)柔性機(jī)械臂的動(dòng)力學(xué)特性Fig.2 Dynamic performance with different modes of flexible manipulator
從圖2中可看出,隨著保留系統(tǒng)的模態(tài)階數(shù)增加,柔性機(jī)械臂末端彈性變形差異變小,取前二階與前三階模態(tài)之間的差異非常小.為節(jié)約計(jì)算資源,同時(shí)保障誤差很小的情況下,取系統(tǒng)的前二階模態(tài)即可滿足精度要求.
2.1 結(jié)構(gòu)參數(shù)對(duì)柔性機(jī)械臂動(dòng)力學(xué)特性的影響
柔性機(jī)械臂的結(jié)構(gòu)參數(shù)包括柔性桿2的橫截面形狀.保持柔性機(jī)械臂的其他參數(shù)不變,加載力矩如圖2所示,分別取不同的截面形狀(等面積的方形截面、矩形截面(h2=4b2)和圓形截面)時(shí),代人式(20)中,進(jìn)行動(dòng)力學(xué)仿真,如圖3所示.
圖3 取不同截面形狀柔性機(jī)械臂的動(dòng)力學(xué)特性Fig.3 Dynamic performance with different cross-section shapes of flexible manipulator
仿真結(jié)果表明:在柔性機(jī)械臂的橫截面積相等的條件下,圓形截面的振動(dòng)頻率最低,末端彈性變形量最大;矩形截面的振動(dòng)頻率最高,末端彈性變形量最小,抑制彈性變形效果最好.
2.2 材料參數(shù)對(duì)柔性機(jī)械臂動(dòng)力學(xué)特性的影響
柔性機(jī)械臂的材料參數(shù)主要包括柔性桿2的密度和彈性模量.保持柔性機(jī)械臂的其他參數(shù)不變,加載力矩如圖2所示,分別取不同的密度ρ2=2 700 kg/m3、ρ2=4 500 kg/m3和ρ2=6 600 kg/m3,不同的彈性模量E2=70 GPa、E2=90 GPa和E2=110 GPa代人式(20)中,進(jìn)行動(dòng)力學(xué)仿真,如圖4、圖5所示.
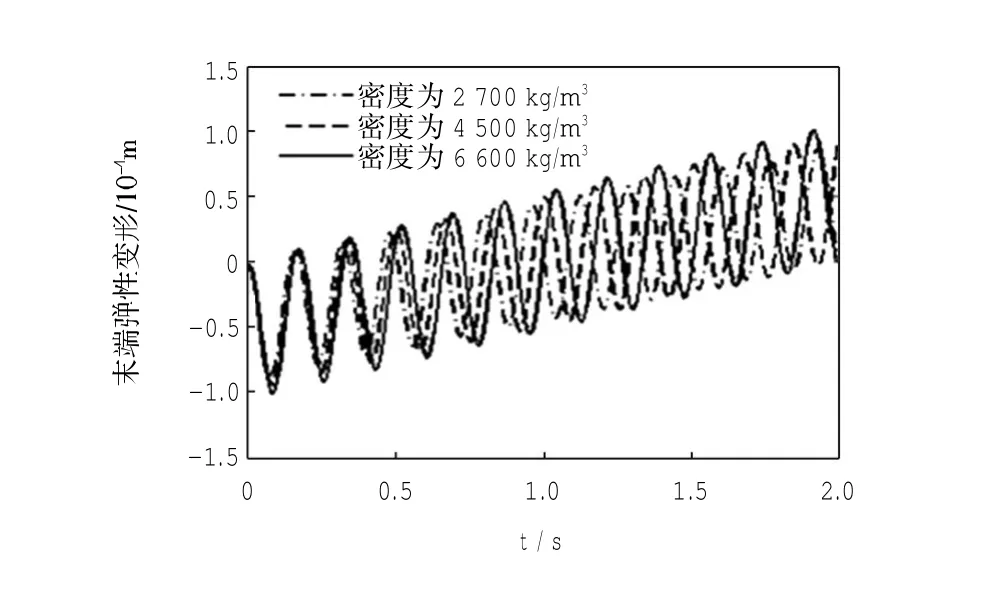
圖4 取不同密度柔性機(jī)械臂的動(dòng)力學(xué)特性Fig.4 Dynamic performance with different density of flexible manipulator
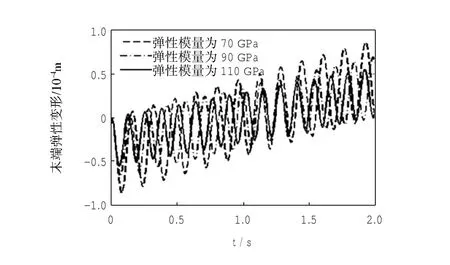
圖5 取不同彈性模量柔性機(jī)械臂的動(dòng)力學(xué)特性Fig.5 Dynamic performance with different elastic modulus of flexible manipulator
仿真結(jié)果表明:
(1)柔性機(jī)械臂的密度越大,振動(dòng)頻率越低,末端彈性變形程度對(duì)材料密度變化不敏感;
(2)柔性機(jī)械臂的彈性模量越大,振動(dòng)頻率越高,末端彈性變形程度越小.
2.3 驅(qū)動(dòng)力矩對(duì)柔性機(jī)械臂動(dòng)力學(xué)特性的影響
保持柔性機(jī)械臂的結(jié)構(gòu)參數(shù)和物理參數(shù)不變,分別加載3種如圖6所示不同的驅(qū)動(dòng)力矩τ2=(1-t)Nm、τ2=0.8 Nm和τ2=t(2-t)Nm,代人式(20)中,進(jìn)行動(dòng)力學(xué)仿真,如圖7所示.
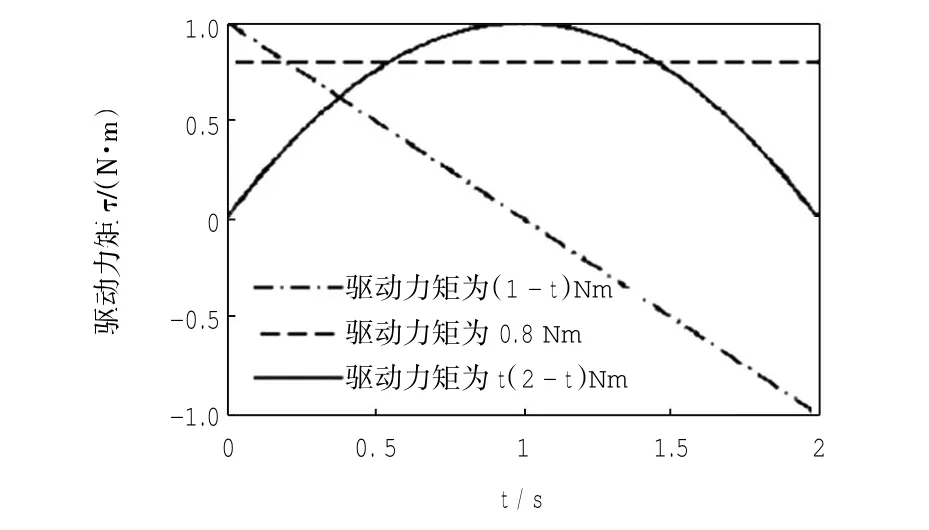
圖6 加載在柔性機(jī)械臂上不同的驅(qū)動(dòng)力矩Fig.6 Differentdrivingmomentsloadinginflexiblemanipulator
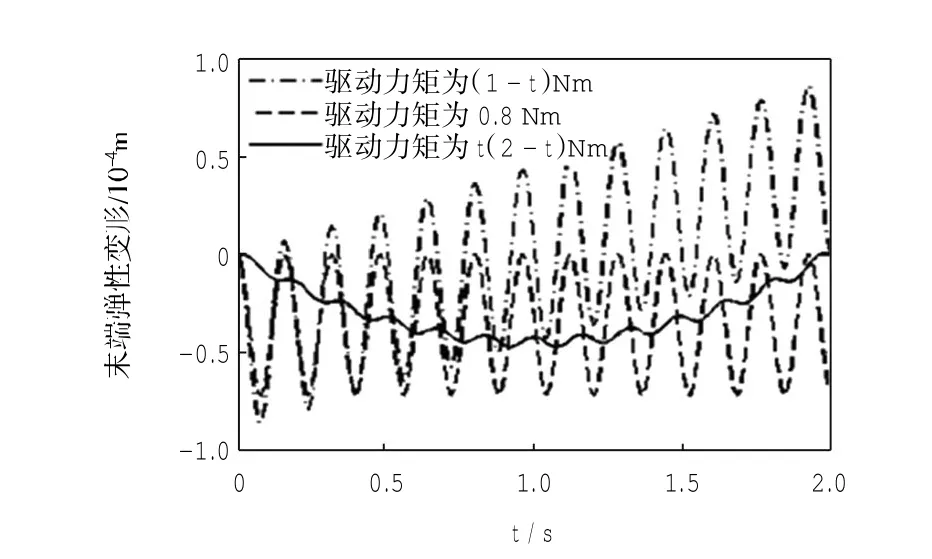
圖7 取不同的驅(qū)動(dòng)力矩柔性機(jī)械臂的動(dòng)力學(xué)特性Fig.7 Dynamic performance with different driving moments of flexible manipulator
仿真結(jié)果表明:隨著時(shí)間的變化,柔性機(jī)械臂的彈性變形程度與施加的驅(qū)動(dòng)力矩變化趨勢(shì)一致,即柔性機(jī)械臂末端彈性變形量隨驅(qū)動(dòng)力矩增大(減小)而增大(減小);比較圖6和圖7,初始時(shí)刻加載的力矩有突變時(shí),柔性機(jī)械臂的振動(dòng)較大.
綜上所述,考慮到柔性機(jī)械臂的結(jié)構(gòu)參數(shù)、材料參數(shù)以及外部施加的驅(qū)動(dòng)力矩對(duì)其影響,由上述分析可知:若要改善柔性機(jī)械臂的動(dòng)力學(xué)性能,即減小柔性機(jī)械臂末端的彈性變形及其振動(dòng)頻率,可以通過采用矩形截面,采用較大彈性模量的材料,適當(dāng)減小外部施加的驅(qū)動(dòng)力矩,盡量避免驅(qū)動(dòng)力矩產(chǎn)生突變.
3 結(jié)束語
本文運(yùn)用假設(shè)模態(tài)法和Kane方程建立了剛-柔性機(jī)械臂系統(tǒng)的動(dòng)力學(xué)模型,并根據(jù)此模型對(duì)柔性機(jī)械臂系統(tǒng)進(jìn)行動(dòng)力學(xué)特性分析,研究了柔性機(jī)械臂的結(jié)構(gòu)參數(shù)、材料參數(shù)和外加驅(qū)動(dòng)力矩對(duì)系統(tǒng)動(dòng)力學(xué)特性的影響,進(jìn)而得出能有效減小和抑制柔性機(jī)械臂系統(tǒng)的彈性變形和振動(dòng)的方法,為進(jìn)一步研究柔性機(jī)械臂的振動(dòng)穩(wěn)定性、結(jié)構(gòu)設(shè)計(jì)與結(jié)構(gòu)參數(shù)優(yōu)化提供了依據(jù).
[1]KORAYEM M H,F(xiàn)IROUZY S,HEIDARI A.Dynamic load carrying capacity of mobile-base flexible-link manipulators:Feedback linearization control approach,December 15-18,2007[C].Sanya:IEEE,C2008.
[2] 王斌銳,方水光,金英蓮.綜合關(guān)節(jié)和桿件柔性的機(jī)械臂剛?cè)狁詈辖Ec仿真[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2012,43(2):211-215.
[3] 金國(guó)光,劉又午,王樹新.大范圍運(yùn)動(dòng)的柔性曲線梁動(dòng)力學(xué)建模及仿真[J].天津大學(xué)學(xué)報(bào):自然科學(xué)版,2004,37(7):629-633.
[4]VAKIL M,F(xiàn)OTOUHI R,NIKIFORUK P N,et al.A study of the free vibration of Flexible-link Flexible-joint manipulators[J].Proceedings of the Institution of Mechanical Engineers,2011,225(6):1361-1371.
[5] 裴希伍,王從慶,吳鵬飛.自由浮動(dòng)空間柔性機(jī)械臂軌跡跟蹤與振動(dòng)抑制[J].華中科技大學(xué)學(xué)報(bào):自然科學(xué)版,2011,39(S2):28-31.
[6] 崔玲麗,張建宇,高立新,等.柔性機(jī)械臂系統(tǒng)動(dòng)力學(xué)建模的研究[J].系統(tǒng)仿真學(xué)報(bào),2007,19(6):1205-1208.
[7] 代小林,叢大成,韓俊偉,等.基于凱恩方程的并聯(lián)運(yùn)動(dòng)平臺(tái)多剛體動(dòng)力學(xué)建模[J].液壓氣動(dòng)與密封,2008(4):60-63.
[8] 孫占庚,金國(guó)光,常志,等.基于Kane法的柔性機(jī)械臂系統(tǒng)動(dòng)力學(xué)建模及其模態(tài)截取研究[J].天津工業(yè)大學(xué)學(xué)報(bào),2009,28(4):61-63.
[9]羊拯民.機(jī)械振動(dòng)與噪聲[M].北京:高等教育出版社,2011:92-94.
Research of dynamic modeling and performance for rigid-flexible manipulators
GUO Zhen-feng1,2,JIN Guo-guang1,2,CHANG Bo-yan1,2,WANG Yan1,2
(1.School of Mechanical Engineering,Tianjin Polytechnic University,Tianjin 300387,China;2.Tianjin Key Laboratory of Advanced Mechatronics Equipment Technology,Tianjin Polytechnic University,Tianjin 300387,China)
Judged by the assumption mode method,configuration expression and kinematic analysis were used to investigate the rigid-flexible manipulators system.Based on Kane's equation,the dynamic model of rigid-flexible manipulators system was established.Numerical simulation illustrates that interception before the second-order modes can meet the rigid-flexible manipulators system accuracy.The impact of different structures on the dynamic performance of flexible manipulator such as physical parameters,material parameters and driving moments were discussed.The results show that by using rectangular section,using larger elastic modulus of materials,reducing the external pressure driving moment,avoiding driving moment producing mutations can effectively improve the dynamic performance of rigid-flexible manipulators system.
flexible manipulator;mode analysis;Kane′s equation;dynamic performance
TH113.1
:A
:1671-024X(2013)01-0070-05
2012-09-18
國(guó)家自然科學(xué)基金項(xiàng)目(50675154);天津市應(yīng)用基礎(chǔ)及前沿技術(shù)研究計(jì)劃項(xiàng)目(09JCYBJC04600)
郭振鋒(1987—),男,碩士研究生.
金國(guó)光(1963—),男,教授,博士生導(dǎo)師.E-mail:jgg63@eyou.com
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44