重型車輛側(cè)翻預(yù)警算法研究
2013-07-20 02:34:52和好孫濤王巖松
計算機(jī)工程與應(yīng)用 2013年24期
關(guān)鍵詞:模型
和好,孫濤,王巖松
1.上海理工大學(xué)機(jī)械工程學(xué)院,汽車工程研究所,上海 200093
2.上海工程技術(shù)大學(xué)汽車工程學(xué)院,上海 201620
重型車輛側(cè)翻預(yù)警算法研究
和好1,孫濤1,王巖松2
1.上海理工大學(xué)機(jī)械工程學(xué)院,汽車工程研究所,上海 200093
2.上海工程技術(shù)大學(xué)汽車工程學(xué)院,上海 201620
1 引言
重型車輛具有質(zhì)心位置高、整車質(zhì)量和體積大、前后輪距相對于整車高度過窄等特點(diǎn),因此側(cè)翻穩(wěn)定閾值較小,容易發(fā)生側(cè)翻事故。一般情況下,在發(fā)生側(cè)翻事故時,駕駛員很難察覺到事故的發(fā)生。據(jù)美國高速公路交通安全管理局(NHTSA)統(tǒng)計,在非碰撞交通事故中,有90%是由汽車側(cè)翻造成的,而其導(dǎo)致的死亡率也達(dá)到了75%,在這些側(cè)翻事故中,重型車輛占到了將近70%左右[1]。重型車輛的側(cè)翻已經(jīng)成為影響交通安全的重要問題。因此,重型車輛的行駛安全性,尤其是行駛中的側(cè)翻穩(wěn)定性問題一直以來是國內(nèi)外學(xué)者的研究重點(diǎn)。
車輛側(cè)翻大體上可分為兩大類,一類是絆倒型側(cè)翻,另一類則是由車輛曲線運(yùn)動引起的非絆倒型側(cè)翻[2]。值得注意的是,絕大多數(shù)的非絆倒型側(cè)翻發(fā)生在重型車輛上,一般主要發(fā)生在高速避障的工況,由于駕駛員精力不集中或躲避緊急狀況(如行人、障礙物)時,過度轉(zhuǎn)動方向盤,引起車輛的失控,從而發(fā)生側(cè)翻。本文重點(diǎn)研究的重型車輛側(cè)翻問題主要集中在非絆倒型側(cè)翻。
近年來,側(cè)翻預(yù)警系統(tǒng)在重型車輛穩(wěn)定性控制中的應(yīng)用大大提高了車輛的側(cè)傾穩(wěn)定性,進(jìn)而有效避免了重型車輛側(cè)翻事故的發(fā)生。1998年,美國密歇根大學(xué)交通研究所開發(fā)了側(cè)翻穩(wěn)定性警告系統(tǒng)(Rollover Stability Advisorsystem,RSA),通過實時測量車輛狀態(tài)來確定側(cè)翻加速度門限值[3]。2001年,Chen等[4]提出了一種基于預(yù)測模型的側(cè)翻時間(Time-To-Rollover,TTR)預(yù)警算法,該算法具有超實時性,可以提前讓駕駛員感知側(cè)翻危險,同時便于與主動防側(cè)翻系統(tǒng)進(jìn)行連接。2007—2009年,吉林大學(xué)對重型車輛側(cè)傾穩(wěn)定性控制進(jìn)行了研究,在ADAMS、Matlab等軟件中建立了重型車輛側(cè)傾動力學(xué)模型,探索車輛結(jié)構(gòu)參數(shù)、運(yùn)動參數(shù)對重型車輛側(cè)傾動力學(xué)的影響[5-6]。但以上這些研究并沒有考慮一些參數(shù)在車輛行駛過程中難以直接測取的問題,從而導(dǎo)致作為側(cè)翻危險判據(jù)的動態(tài)門限值不能準(zhǔn)確獲得。
本文針對重型車輛非絆倒型側(cè)翻的特點(diǎn),首先建立可實時計算的重型車輛簡化動力學(xué)模型,然后利用該簡化動力學(xué)模型,結(jié)合經(jīng)典Kalman濾波狀態(tài)估計技術(shù)實時準(zhǔn)確估計重型車輛在行駛過程中車身側(cè)傾角的大小,并由此計算出車輛側(cè)翻預(yù)警控制的動態(tài)門限值。在此基礎(chǔ)上,設(shè)計基于側(cè)翻時間(TTR)的重型車輛側(cè)翻預(yù)警算法,最后利用Matlab/Simulink與Trucksim軟件聯(lián)合仿真對設(shè)計的側(cè)翻預(yù)警算法進(jìn)行驗證。
2 重型車輛側(cè)翻預(yù)測模型
本文采用三自由度車輛線性高斯模型來設(shè)計重型車輛側(cè)翻預(yù)警系統(tǒng)。如圖1所示,該線性模型的三個自由度分別為側(cè)向運(yùn)動,橫擺運(yùn)動和側(cè)傾運(yùn)動。圖中m為整車質(zhì)量;h為質(zhì)心到側(cè)傾中心的距離;δ為前輪轉(zhuǎn)角;?為側(cè)傾角;ψ˙為橫擺角速度;α12、α34分別為前、后輪側(cè)偏角;β為質(zhì)心側(cè)偏角;lv、lh分別為質(zhì)心至前、后軸距離;Vx、Vy分別為縱向、側(cè)向速度;F12、F34分別為前、后輪總側(cè)向力;ay為質(zhì)心處側(cè)向加速度。
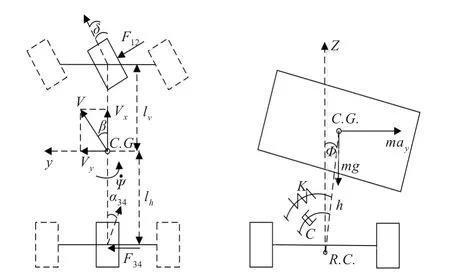
圖1 重型車輛模型示意圖
為簡化模型,作如下假設(shè):
(1)忽略轉(zhuǎn)向系影響,模型以前輪轉(zhuǎn)向角輸入。
(2)不考慮車輛的俯仰運(yùn)動。
(3)忽略空氣阻力的作用。
(4)假設(shè)車輛在水平路面行駛,忽略車輛的垂向運(yùn)動。
(5)假設(shè)車輛質(zhì)心處的縱向速度為一常數(shù)。
(6)忽略車輛左、右輪胎由于載荷的變化而引起的輪胎特性的變化以及輪胎回正力矩的作用。
(7)忽略輪胎和懸架的非線性影響,簡化懸架剛度和阻尼為等效側(cè)傾剛度和等效側(cè)傾阻尼。
(8)非簧載質(zhì)量相對于簧載質(zhì)量而言較小。
(9)簧載質(zhì)量繞X、Z軸的慣性積很小,不予考慮。
由此重型車輛模型,據(jù)達(dá)朗貝爾原理,可列出下列三個平衡方程:
(1)繞Z軸的力矩平衡方程為:

式中,Ixx是整車質(zhì)量繞車身質(zhì)心的縱軸的轉(zhuǎn)動慣量;Ix是整車質(zhì)量繞側(cè)傾軸的轉(zhuǎn)動慣量;Cv、Ch分別為前、后輪胎的總側(cè)偏剛度;k為懸架等效側(cè)傾剛度;c為懸架等效側(cè)傾阻尼系數(shù)。
3 基于側(cè)傾角估計的TTR側(cè)翻預(yù)警算法
本章研究基于側(cè)傾角估計的TTR側(cè)翻預(yù)警算法。具體的算法如下:首先選擇車輛動態(tài)橫向載荷轉(zhuǎn)移率(Lateralload Transfer Rate,LTR)作為側(cè)翻危險判據(jù)的預(yù)警門限值。這樣的門限值選擇使得預(yù)警算法更加具有普適性;其次,為了更加精確地獲得動態(tài)預(yù)警門限值,在側(cè)翻預(yù)警算法中使用基于卡爾曼濾波技術(shù)的參數(shù)估計器。
3.1 側(cè)翻預(yù)警門限值計算
傳統(tǒng)意義上,車輛橫向載荷轉(zhuǎn)移率(LTR)可以定義為車輛兩側(cè)車輪上的垂直載荷之差與垂直載荷之和的比值,即[7]

當(dāng)左右輪胎載荷相等時,LTR的值為0;當(dāng)發(fā)生側(cè)翻危險時,一側(cè)車輪離開地面,此時LTR的絕對值為1,即對于不同的車型和不同的行駛條件,側(cè)翻預(yù)警門限值可確定為一定值,為保證車輛的行駛安全,本文將動態(tài)橫向載荷轉(zhuǎn)移率預(yù)警門限值設(shè)為0.9。
由于車輛在行駛過程中左右車輪垂直載荷不斷變化且不易直接測量,所以難以根據(jù)定義式直接計算出動態(tài)LTR的值。本文選取一套實時計算橫向載荷轉(zhuǎn)移率LTR的算法,具體計算公式為[8]:

式中,hRC為車輛側(cè)傾中心高度,dt為車輛輪距。所以,要想獲得精確的動態(tài)橫向載荷轉(zhuǎn)移率,必須首先獲得車輛側(cè)向加速度和實際側(cè)傾角這兩個狀態(tài)量。車輛側(cè)向加速度可以通過傳感器直接測出,而車輛的實際側(cè)傾角卻難以通過車載傳感器直接獲得,需通過Kalman濾波估計技術(shù)對其進(jìn)行實時的估計,下面具體介紹通過Kalman濾波技術(shù)進(jìn)行狀態(tài)估計的過程。
3.2 車身側(cè)傾角的Kalman濾波估計算法
Kalman濾波器用反饋控制的方法估計過程狀態(tài):濾波器估計過程某一時刻的狀態(tài),然后以(含噪聲的)測量變量的方式獲得反饋。因此Kalman濾波器可分為兩部分:時間更新方程和測量更新方程。時間更新方程負(fù)責(zé)實時向前推算當(dāng)前狀態(tài)變量和誤差協(xié)方差估計的值,以便為下一個時間狀態(tài)構(gòu)造先驗估計。
Kalman濾波估計算法工作原理如圖2所示。

圖2 Kalman濾波估計算法原理圖
假定車輛的縱向速度Vx在該時刻不變,車輪的前輪轉(zhuǎn)角δ作為控制輸入,側(cè)向加速度傳感器實際測量的側(cè)向加速度ay作為車輛系統(tǒng)的觀測變量。在Kalman濾波估計器中的量測方程為:

具體車輛狀態(tài)Kalman濾波估計器設(shè)計步驟為:
(1)車輛側(cè)翻模型的初始狀態(tài)變量設(shè)定為:

(2)Kalman濾波估計器系數(shù)設(shè)定為:
測量噪聲協(xié)方差R=1;
過程激勵噪聲協(xié)方差Q=1 000×I4;
(3)Kalman濾波估計器時間更新部分為:
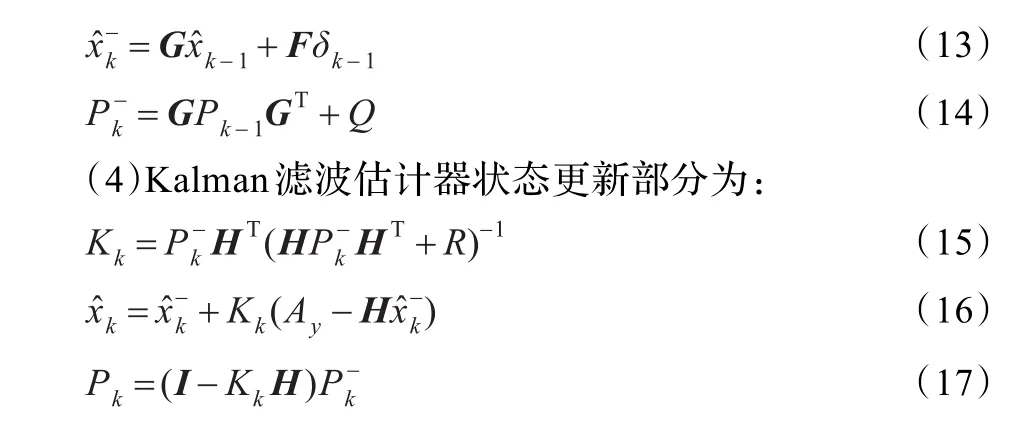
式中,Pk為誤差協(xié)方差,Kk為Kalman增益系數(shù),x?k為狀態(tài)估計量,G、F、H、A為系數(shù)矩陣。
3.3 基于側(cè)傾角估計的重型車側(cè)翻預(yù)警算法
基于Kalman濾波側(cè)傾角估計的TTR側(cè)翻預(yù)警算法邏輯結(jié)構(gòu),如圖3所示。算法是基于參考模型來預(yù)測真實車輛的狀態(tài)參數(shù),利用前文所建立的車輛側(cè)翻模型,以車輛當(dāng)前時刻的運(yùn)行狀態(tài)為初始值,按照車輛側(cè)翻規(guī)律以Ts為步長計算模型的側(cè)翻指標(biāo)LTR。當(dāng)該指標(biāo)第一次滿足側(cè)翻條件時記下計算步數(shù)N,即可以得到車輛側(cè)翻預(yù)警時間為N×Ts。

圖3 改進(jìn)TTR側(cè)翻預(yù)警算法邏輯結(jié)構(gòu)圖
在側(cè)翻預(yù)警系統(tǒng)中,為減小計算工作量,通常預(yù)設(shè)TTR側(cè)翻預(yù)警門限值為X秒。若X秒內(nèi)側(cè)翻指標(biāo)LTR不滿足側(cè)翻條件,即未來X秒時間內(nèi)車輛不會發(fā)生側(cè)翻,則認(rèn)為車輛處于安全狀態(tài),停止本周期的計算。本文設(shè)定TTR門限值X為3 s。
預(yù)警過程為一個倒計時過程,TTR的值越小,則車輛發(fā)生側(cè)翻的風(fēng)險越大,TTR的值為0時,說明車輛正在發(fā)生側(cè)翻。
4 側(cè)傾預(yù)警仿真分析

圖4 魚鉤轉(zhuǎn)向工況仿真結(jié)果
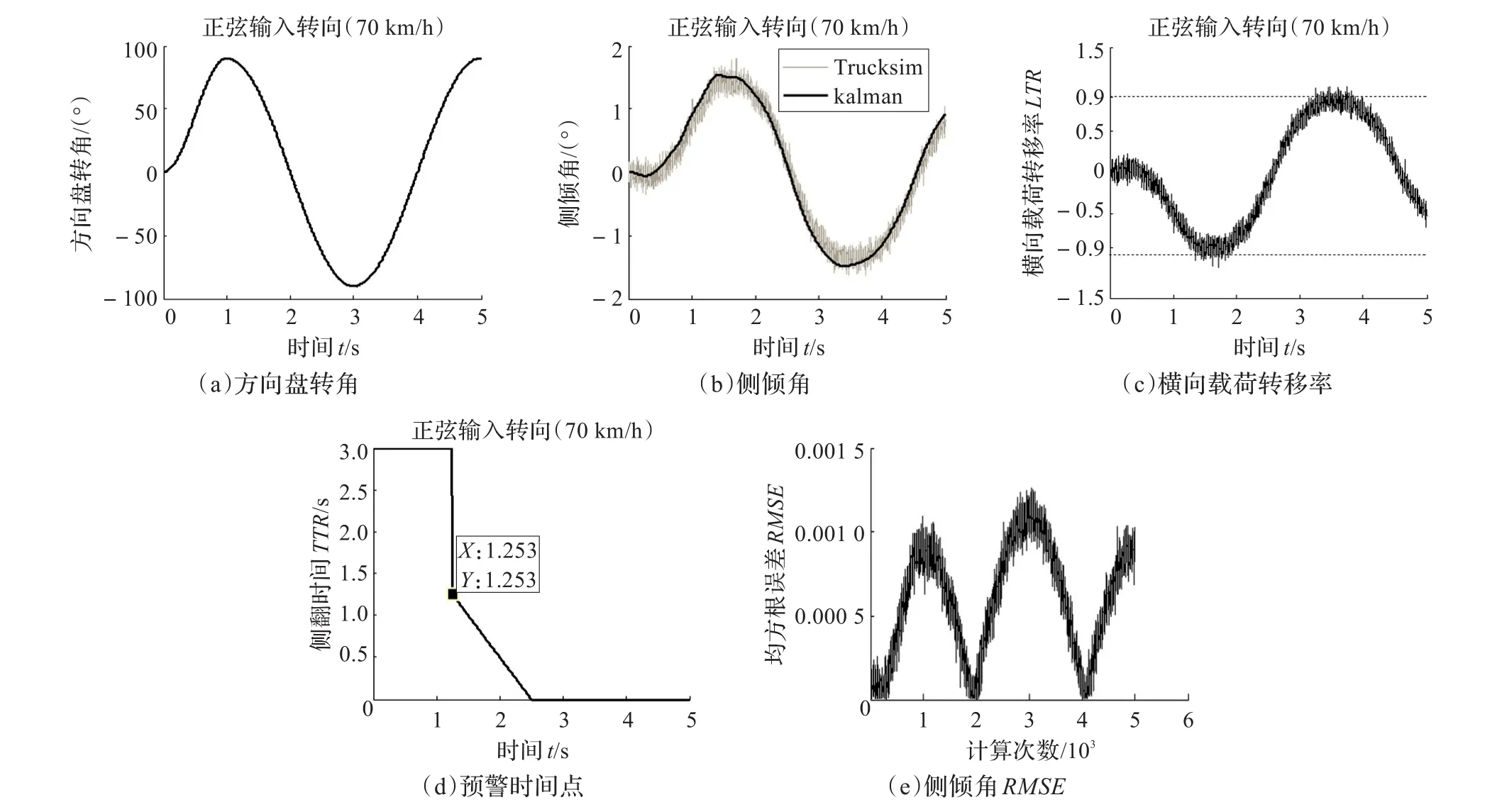
圖5 正弦轉(zhuǎn)向工況仿真結(jié)果
在Matlab/Simulink環(huán)境下建立基于側(cè)傾角估計的重型車輛側(cè)翻預(yù)警算法,并利用Trucksim軟件對側(cè)翻算法進(jìn)行仿真驗證。在初始車速為50 km/h時進(jìn)行魚鉤轉(zhuǎn)向?qū)嶒灒诔跏架囁贋?0 km/h時進(jìn)行正弦輸入轉(zhuǎn)向?qū)嶒灒诔跏架囁贋?0 km/h時進(jìn)行階躍轉(zhuǎn)向?qū)嶒灒诔跏架囁贋?0 km/h時進(jìn)行緊急避障實驗,側(cè)翻預(yù)警算法的仿真結(jié)果如圖4至圖7所示。
由圖4可知,在魚鉤轉(zhuǎn)向工況下,Kalman濾波器估計出的車身側(cè)傾角與Trucksim軟件中實際的車身側(cè)傾角基本吻合,均方根誤差較小。而后由TTR算法計算可知側(cè)翻預(yù)警時間為1.592 s。
由圖5可知,在正弦轉(zhuǎn)向工況下,Kalman濾波器估計出的車身側(cè)傾角與Trucksim軟件中實際的車身側(cè)傾角基本吻合,均方根誤差較小。而后由TTR算法計算可知側(cè)翻預(yù)警時間為1.253 s。
由圖6可知,在階躍轉(zhuǎn)向工況下,Kalman濾波器估計出的車身側(cè)傾角與Trucksim軟件中實際的車身側(cè)傾角基本吻合,均方根誤差較小。而后由TTR算法計算可知側(cè)翻預(yù)警時間為2.979 s。
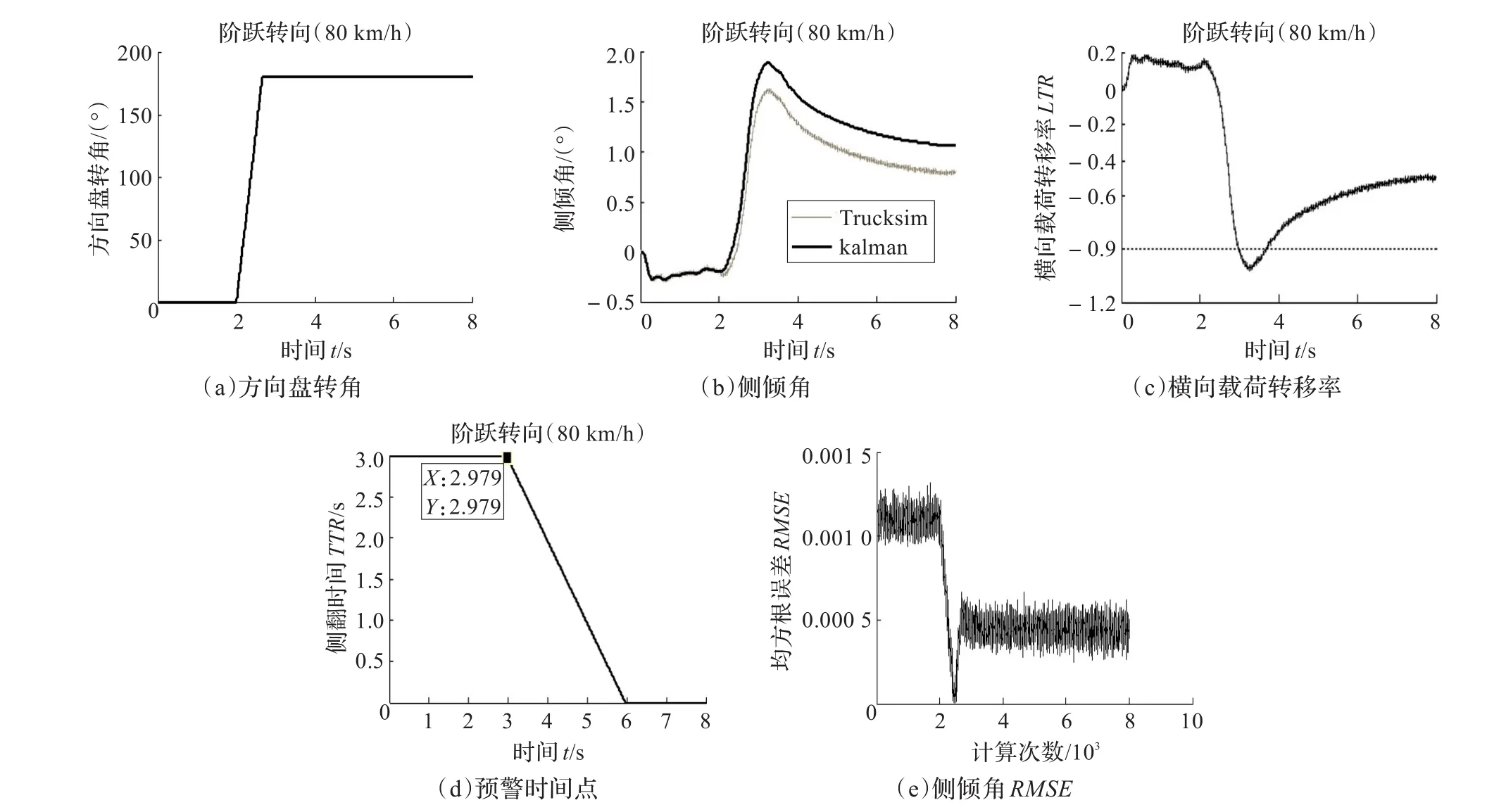
圖6 階躍轉(zhuǎn)向工況仿真結(jié)果
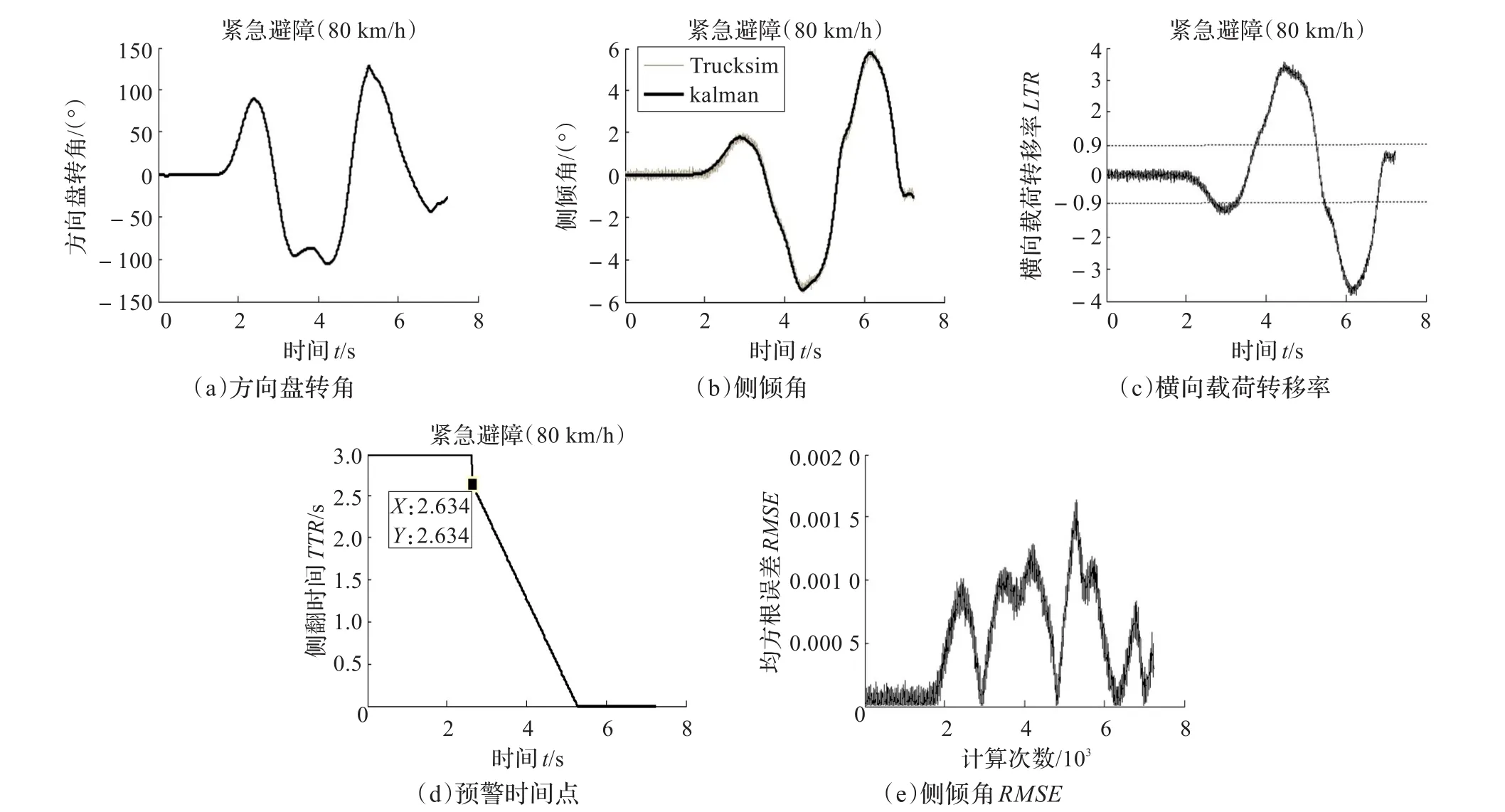
圖7 緊急避障工況仿真結(jié)果
由圖7可知,在緊急避障工況下,Kalman濾波器估計出的車身側(cè)傾角與Trucksim軟件中實際的車身側(cè)傾角基本吻合,均方根誤差較小。而后由TTR算法計算可知側(cè)翻預(yù)警時間為2.634 s。
5 結(jié)論
(1)針對目前重型車輛側(cè)翻預(yù)警算法動態(tài)門限值(即橫向載荷轉(zhuǎn)移率)較難獲得的問題,提出了Kalman濾波估計算法,并建立了車身側(cè)傾角估計線性高斯模型,結(jié)合模型并利用此算法可以比較精確地估計出車輛行駛過程中的車身側(cè)傾角,從而可實時得到橫向載荷轉(zhuǎn)移率的動態(tài)值大小。
(2)利用Matlab/Simulink與Trucksim軟件聯(lián)合仿真,來對基于側(cè)傾角估計的TTR側(cè)翻預(yù)警算法的效果進(jìn)行驗證。仿真結(jié)果表明,此算法可以精確進(jìn)行重型車輛的側(cè)翻預(yù)警,提醒駕駛員及時修正具有危險性的操作,從而避免側(cè)翻事故的發(fā)生。
[1]Facts T S.A compilation of motor vehicle crash data from the fatality analysis reporting system and the general estimates system[R].National Highway Traffic Safety Administration,2003.
[2]余志生.汽車?yán)碚揫M].5版.北京:機(jī)械工業(yè)出版社,2009.
[3]Ervin R D,Winkler C B,F(xiàn)ancher P S,et al.Cooperative agreement to foster the development of a heavy vehicle intelligent dynamic stability enhancement system[R].University of Michigan Transportation Research Institute,1992.
[4]Chen B C.Warning and control for vehicle rollover prevention[R].University of Michigan,2001.
[5]于堯.基于差動制動的半掛汽車列車穩(wěn)定性仿真與控制研究[D].長春:吉林大學(xué),2007.
[6]Zhu Tianjun.Yaw/Roll stability modeling analyses and control of heavy tractor-semitrailer,SAE Paper No.2007-01-3574[R]. 2007.
[7]Preston-Thomas J,Woodrooffe J H F.A feasibility study of a rollover warning device for heavy trucks,Transport Canada Publication No.TP10610E[R].1990.
[8]Miege A J P,Cebon D.Active roll control of an experimental articulated vehicle[J].Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2005,219(6):791-806.
HE Hao1,SUN Tao1,WANG Yansong2
1.Institute of Automotive Engineering,School of Mechanical Engineering,University of Shanghai for Science and Technology, Shanghai 200093,China
2.Automotive Engineering College,Shanghai University of Engineering Science,Shanghai 201620,China
Focusing on the issue of realizing the traveling heavy vehicle non-tripped rollover warning,a 3-DOF rollover model and a Time-To-Rollover(TTR)-based rollover algorithm are established.On this basis,Kalman filter technique is introduced to the Time-To-Rollover(TTR)algorithm,to present a TTR rollover warning algorithm based on roll angle estimation,thereby realizing the precision prediction of dynamic rollover character.This paper validates the algorithm by using Matlab/Simulink and Trucksim co-simulation platform.The results show that the rollover warning algorithm based on roll angle estimation can successfully work and provide a new design thinking to the issue of heavy vehicle non-tripped rollover warning.
heavy vehicle;Kalman filter;roll angle estimation;time-to-rollover;rollover warning algorithm
針對重型車輛在行駛過程中非絆倒型側(cè)翻預(yù)警實現(xiàn)問題,建立了三自由度車輛側(cè)翻模型并設(shè)計了以側(cè)翻時間(TTR)為預(yù)警標(biāo)準(zhǔn)的算法。考慮到預(yù)警算法中動態(tài)門限值中某些參數(shù)難于直接測取的問題,將Kalman濾波技術(shù)融合于其中,提出了基于車身側(cè)傾角估計的TTR側(cè)翻預(yù)警算法,實現(xiàn)車輛動態(tài)側(cè)翻特性的精確預(yù)測。而后利用Matlab/Simulink與Trucksim軟件聯(lián)合仿真對側(cè)翻預(yù)警算法進(jìn)行驗證。結(jié)果表明,基于車身側(cè)傾角估計的重型車輛側(cè)翻預(yù)警算法能夠順利運(yùn)行,為非絆倒型側(cè)翻預(yù)警問題提供了一種新的設(shè)計思路。
重型車輛;卡爾曼濾波;車身側(cè)傾角估計;側(cè)翻時間;側(cè)翻預(yù)警算法
A
TP391.9
10.3778/j.issn.1002-8331.1308-0013
HE Hao,SUN Tao,WANG Yansong.Rollover warning algorithm for heavy vehicles.Computer Engineering and Applications,2013,49(24):256-261.
國家自然科學(xué)基金(No.51175320);上海市科研創(chuàng)新項目(No.12ZZ145)。
和好(1988—),男,在讀碩士,研究領(lǐng)域為車輛系統(tǒng)動力學(xué)及其控制;孫濤(1974—),男,博士,副教授,研究領(lǐng)域為車輛系統(tǒng)動力學(xué)及其控制;王巖松(1971—),男,博士,教授,研究領(lǐng)域為振動和噪聲測控。E-mail:red_devil_hh@163.com
2013-08-02
2013-09-18
1002-8331(2013)24-0256-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
