爬樓梯輪椅發展及關鍵技術的研究*
2013-08-02 00:48:26王占禮郭化超陳延偉
機械研究與應用 2013年2期
關鍵詞:系統
王占禮,郭化超,陳延偉
(長春工業大學機電工程學院,吉林長春 130012)
1 引言
在經濟飛速發展、人口密度越來越大的現代社會里,樓梯的誕生緩解了建筑用地日益緊張的壓力,提高了人們對空間的利用率。但是,目前常見的建筑物既沒有設計也沒有建造一個方便殘障人士及行動不便的老年人士出入的通道。在這種情況下,樓梯對于他們往往意味著一個巨大的障礙需要去克服,給他們的出行帶來了很多不便,影響他們與外界的溝通交流。而且,這一問題隨著老年人和殘疾人數量的增多[1]日益突出。
輪椅對于年老體弱者及肢體傷殘者而言是他們必不可少的代步工具,其應用需求越來越大。但是,它們一般僅適合在平地上使用,很少具備爬樓梯和翻越路障的能力,這給輪椅使用者帶來諸多不便。由于傷殘者對回歸社會和獨立生活的渴望,促使輪椅的性能和質量不斷完善和提高[2]。為此,目前也有很多人致力于爬樓梯輪椅的研究。
我國的輪椅產業發展較緩慢,能爬樓梯的多功能輪椅在國內尚無成熟的產品。隨著社會生產力的發展,人們生活水平的不斷提高,考慮老年人及殘疾人對出行的方便性的需求,研制具有爬樓梯功能的輪椅具有重大的現實意義。在目前已有的爬樓梯機構中,爬樓梯輪椅的越障機構經歷了輪式、履帶式、多履帶式、輪腿復合式、輪履復合式等的發展歷程[3]。這些越障機構的設計目的:一方面是為更好地適應地形,增加移動機構與接觸面的接觸面積,提高牽引力和車體的穩定性;另一方面是為保障越障過程的連續性,提高越障能力和能源的利用效率[4]。
2 國內外研究現狀
近幾十年,國內外的許多大學、公司和研究機構都對爬樓梯的裝置進行了深入的研究,提出了各種各樣的產品或解決方案。總體而言,根據爬升結構的不同,通常采用三種結構原理[4],一種結構是采用行星輪機構,它們不僅繞自身的軸旋轉還繞一個所有輪的共同軸線旋轉;一種結構是履帶輪型爬樓梯輪椅;一種結構是腿足式結構。
目前,國外為解決乘坐輪椅者跨越樓梯的方式是借助樓宇的緊急疏散的運輸設備—爬樓車,即將輪椅臨時固定在爬樓車上,藉以上下樓梯,使用完畢后再放回原處,操作程序繁瑣。雖然能解決乘坐輪椅者上下樓梯,但在沒有配備爬樓車的樓宇就無法上下樓梯[5-7]。
國內外爬樓輪椅通常運用行星輪機構來實現上下樓梯[6-8]。對于行星輪型爬樓輪椅,結構簡單,并利用自鎖機構保證上下樓梯時不傾倒。但該爬樓輪椅對樓梯的適應性較差,不能滿足使用者對舒適性和可靠性的需求。
對于履帶輪型爬樓輪椅,在上下樓梯時采用履帶輪的方式,保證了上下樓梯過程的連續性[7-8]。但是,所述履帶輪型爬樓輪椅無法實現從斜面到平面的姿態平穩轉換,且結構笨重,對樓梯邊沿的損害程度很大,運動過程的阻力矩較大,換向過程實現困難,能源利用效率低,這些問題在很大程度上限制了該型輪椅在上下樓梯中的使用。
對于輪-履組合型爬樓輪椅,該輪椅運用四桿結構,通過升降輪子以實現輪子與履帶輪的轉換[3-8]。但是,所述爬樓輪椅采用四桿結構,僅有一個自由度,故不能實現高精度的運行輸出或完成更復雜的運動規律。
對于腿足式結構爬樓梯輪椅,該結構模仿人上下樓梯的動作,采用一組或幾組腿交替升降、支撐爬樓的原理[7-10],對樓梯的適應性很強,但是,其承載重心偏高,傾翻危險性大,對穩定性要求極高,控制難度很大,機構結構復雜,還有諸多問題需要解決[9]。
總結國內外各類爬樓梯輪椅的特點可以看出,發展至今大多數爬樓梯裝置的自主性不高,仍需在旁人協助的條件下實現上下樓梯,而且在穩定性和安全性等可靠性方面存在的很多問題也值得深入研究。如何在保障爬樓梯輪椅整體體積小、重量輕的前提下,結合先進的傳感手段和控制技術實現其可靠、平穩的上下樓梯將是今后“老人/殘障者上下樓梯助行系統”研究領域的發展方向。
3 爬樓梯輪椅系統關鍵技術
爬樓梯輪椅系統研究內容主要由機械結構設計、控制系統設計兩大部分組成[11]。其中機械機構設計主要完成爬升機構設計、輔助支撐機構設計兩方面內容;控制系統設計包括控制系統結構設計和控制系統算法兩部分,爬樓梯輪椅系統的基本控制結構如圖1所示。這兩部分內容緊密聯系、相輔相成共同作用實現理想的運動路徑和運動狀態。
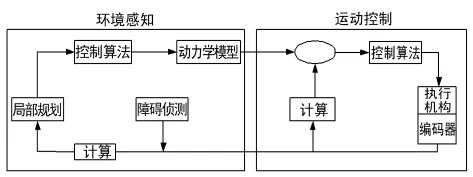
圖1 爬樓梯輪椅系統基本控制結構
3.1 機械結構設計
機械結構設計的目的應滿足爬樓梯助行系統機械結構緊湊、整體重量小,具有合理的路徑規劃能實現連貫爬升運動。機械結構設計的優劣程度很大范圍內決定了系統的適應能力及控制過程的難易程度,是系統設計的核心所在。
3.1.1 爬升機構設計
爬樓梯輪椅系統機械結構設計的核心是爬升機構,能夠實現爬越樓梯這種越障運動的主要有星輪式、履帶式、腿足式3種。在這3種爬升機構的基礎上,吸取各自的優點,發展組合式的爬樓梯裝置將是今后研究的創新方向。
結合爬樓梯運動路徑的特點,采用可將獨立運動分解為兩個有差異運動,或將兩個有差異的運動合成為一個運動的差動機構、組合型機構、新型變形機構,可實現輪椅從平地運動—爬升運動—平地運動過程的姿態平穩轉化。綜合考慮輪、腿、履帶機構的優勢,把三者復合起來使用,可有效克服各自的不足,保障爬樓梯輪椅能夠安全、可靠、高效地實現上下樓梯的過程。不同爬升機構的對比參見表1。
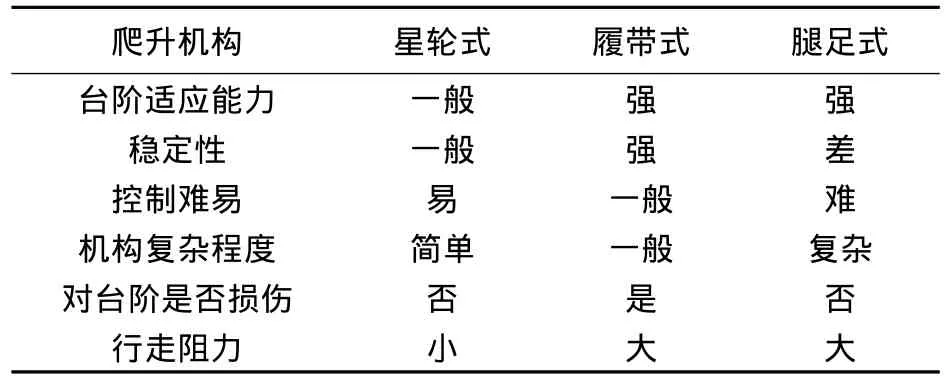
表1 不同爬升機構的對比
3.1.2 輔助支撐機構設計
電動爬樓梯輪椅的使用群體是老年人以及殘障者,因此對輪椅的使用安全性要求極高。同時,在上下樓梯運行過程中,質心位置、支撐條件的不斷變化對系統安全、可靠的實現合理的運動軌跡提出了很高的要求。
為保證爬升過程的安全性,爬升裝置和輪椅以及使用者的總重心必須始終位于支撐裝置與樓梯臺階支撐點之間。系統由平地狀態突然啟動時,由于自身的慣性作用會發生后傾的現象,為了解決這一問題通常在系統的后部增加了一個防止后傾的裝置;為了避免爬升過程前傾的危險,考慮擴大支撐邊界,來增加前傾穩定裕量是有效的解決辦法;為保證上下樓梯操作的安全性,需有相應的鎖定裝置,一旦輪椅傾斜角度超出傾翻穩定性要求范圍之外,鎖定裝置鎖定,支撐裝置支撐在樓梯臺階上。
從乘坐著舒適性角度出發,輪椅椅面要始終保持水平,如果輪椅椅面前傾乘坐者就會有種向前栽的感覺,假如輪椅椅面后傾,乘坐者的后背就會緊緊的依靠在輪椅架上從而輪椅有后傾的趨勢。為了使輪椅椅面保持水平,通常采用三點高副球鉸接機構的椅面平衡調節機構,其中,一點高副球鉸接固定,兩點高副球鉸接可調,用于調節椅面的平衡。
3.2 控制系統設計
為保證爬樓梯輪椅能夠安全、可靠、高效地實現上下樓梯的過程,并可同時作為電動輪椅使用,爬樓梯輪椅的控制器必須具有很強的功能;除根據電動輪椅控制器所具有的速度調節、運動控制、故障檢測等功能之外,還必須具有可以實時檢測使用者的坐姿和位置、爬樓梯輪椅與樓梯的相對位置、爬樓梯輪椅的運動狀態等功能,并可以根據傳感器信息對爬樓梯輪椅的驅動系統進行正確的控制或給出報警信號。
3.2.1 控制系統結構設計
爬樓梯輪椅系統除了完成普通輪椅功能要求之外還需運行在電動輪椅和上下樓梯輪椅兩種模式下,其控制功能應分別由兩套相互獨立的開環控制系統來完成,以實現平地行走、攀爬不同角度的斜坡以及上下不同高度寬度的樓梯功能要求,這也就導致電動爬樓梯輪椅的運動形式十分復雜,應針對不同環境下輪椅需要實現的動作設計爬樓梯的控制系統。
隨著機器人技術的發展,移動機器人控制技術大量應用于爬樓梯輪椅的控制系統中,使得爬樓梯輪椅具有更好的交互性,適應性和自主性。采用嵌入式控制系統可有效解決信息集中處理使得上位機信心處理量大,負擔重,實時性差無法滿足實際使用的缺點[12],為爬樓梯輪椅控制系統的研究提供了新的方向。中科院自動化所研制的嵌入式多功能輪椅系統在該方面進行了嘗試,采用ARM+DSP+FPGA的方式來構建多功能輪椅的中央控制系統、傳感器系統、視覺系統和運動控制系統,整個控制系統系統運行穩定,具有實時性高、功耗低,續航時間長的特點,為爬樓梯輪椅向產業化方向發展邁進了一大步[13]。
3.2.2 控制系統算法
在未知和不確定的環境下,爬樓梯輪椅需要通過多種傳感器收集數據,用以界定周圍環境及自身狀態信息,需要用一定算法對數據進行分析、融合,比較完整地反映環境特征和自身狀態,為系統運動控制提供精確的數據信息。爬樓梯輪椅在行駛時必須不斷地感知周圍環境及自身狀態信息[14],所以要求控制系統算法能夠對實時提供的各種信息進行快速有效處理,并能保證信息的完整性。
常規的PID控制雖然具有算法簡單、精度高、可靠性強的優點,但是僅對于可建立精確數學模型的控制系統具有很好的控制作用。對于爬樓梯輪椅電機調速系統而言,被控對象復雜,具有非線性、強耦合以及時變性的特點,很難達到控制系統的精確魯棒性和抗干擾性能[12]。模糊控制具有魯棒性強的優點,能較好的適應輪椅運行過程中路況突變等干擾條件,但單純的模糊控制不能很好的消除系統的穩態誤差[15]。使用復合算法可以使控制器有較強的魯棒性和較小的靜態誤差,但復雜的算法本身就是控制器實現的障礙。模糊PID控制器結合了模糊控制和PID控制器兩者的優點,可根據不同的偏差和偏差變化率選擇不同的比例、微分、積分參數,從而即具有模糊控制靈活、適應性強的優點,又具有PID控制器精度高的特點,對爬樓梯輪椅運動控制系統具有良好的控制效果。模糊控制系統的工作原理如圖1所示。
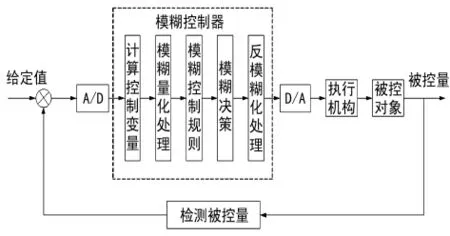
圖1 模糊控制系統工作原理
4 發展趨勢與展望
綜上所述,針對電動爬樓梯輪椅的研究已經取得了一定的成效,但也要看到目前階段主要還停留在實驗室或是少數定做,并沒有真正產業化,在研究上仍有很多空間[11]。未來的研究將向以下幾個方面發展。
(1)質量輕 爬樓梯輪椅要走向實際應用,必須考慮其應用的情況。作為代步工具,爬樓梯輪椅車的能源系統一般采用的是機載電源,所以要求系統整體重量輕,以延長續航時間。同時,減輕重量也可相應提高上下樓梯時的靈活性,降低控制的難度。
(2)可靠性高 爬樓梯輪椅面向的對象是老年人以及肢體殘疾人士,爬樓梯輪椅的設計應從細微處出發,設計安全、舒適、性能穩定的產品,爬樓梯過程中應保證重心波動小,安全保證措施響應及時。
(3)功能齊全 爬樓梯輪椅作為使用者生活中重要的部分,在功能設計上應最大程度的滿足人性化要求,構建良好的人機交互界面,使產品真正意義上融入到使用者生活的各個方面。
(4)價格低 爬樓梯輪椅投入市場被用戶接受的一個重要因素是價格因素,爬樓梯輪椅要實現批量生產,必須采用模塊化的設計思想,這樣用戶不僅可以自主選擇配置合適的輪椅,同時,也可降低生產成本,縮短研發周期,提高性價比。
隨著人工智能技術、計算機技術、多傳感器信息融合技術等技術的不斷發展,爬樓梯輪椅的研究也呈現出全新的局面,朝著人機一體化的方向不斷發展。相信在不久的將來,電動爬樓梯輪椅將真正融入到老年人和殘障人士的生活中,大大改善他們的生活質量,使他們的出行更為方便,樓梯和路障將不再是他們出行的障礙,幫助他們重新融入到社會中去。
[1] 鄭曉瑛.中國殘疾人口現狀與未來發展趨勢[J].北京大學校報,2008.
[2] 劉 靜.自動爬樓梯輪椅的虛擬設計與運動仿真[J].機械研究與應用,2012(6):133.
[3] 馬永為,趙 臣.基于行星輪系的爬樓梯輪椅研究[D].天津:天津大學,2008.
[4] 隋春平,吳鎮偉.一種基于差動機構的履腿復合式移動機器人:CN,201010563622.7[P].2010.11.29.
[5] 傅曉錦,朱世奇.雙履帶輪越障輪椅:CN,201210205979.7[P].
[6] Axel lankenau,Thomas rofer.A versatile and safe mobility assistant[J].IEEE Robotics and Automation,2001(8):29-37.
[7] Lawn M J.Study of Stairs-Climbing Assistive Mechanisms for the Disabled[D].Nagasaki:University of Nagasaki,2002.
[8] 蘇和平,王人成.爬樓梯輪椅的研究進展[J].中國康復醫學雜志,2005,20(5):366-368.
[9] 白 琨.履帶式移動機器人越障能力的研究[D].內蒙古:內蒙古工業大學,2007.
[10] 段星光,黃 強,李科杰.小型輪履腿復合式機器人設計及運動特性分析[J].機械工程學報,2005(8):108-109.
[11] 何清華,黃素平,黃志雄.智能輪椅的研究現狀和發展趨勢[J].機器人技術與應用,2002(2):12-16.
[12] 肖 真.基于ARM技術的直流無刷電機控制系統研究[D].哈爾濱:哈爾濱工程大學,2007.
[13] 周 偉.多功能輪椅運動控制系統研究與開發[D].廣東:華南理工大學,2010.
[14] 廖曉輝,沈大中,王東署.智能輪椅的研究現狀與關鍵技術分析[J].制造業自動化,2008,30(4):4-5.
[15] 諸 靜.模糊控制理論與系統原理[M].北京:機械工業出版社,2005.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32