跟蹤臨近空間目標的衰減記憶最小二乘算法
2013-08-10 06:16:44邵俊偉
艦船電子對抗 2013年3期
關鍵詞:記憶
吳 超,單 奇,邵俊偉
(中國電子科技集團公司38所,合肥230088)
0 引 言
臨近空間又稱為亞軌道或空天過渡區,包括大氣平流層區域、中間大氣層區域和部分電離層區域。根據國際航空聯合會的定義,臨近空間的范圍確定在23~100km[1]。
隨著臨近空間的戰略價值引起美國為首的航天大國的關注,近年來各軍事強國競相著手研發各類低速和高速臨近空間武器。其中,對我國國土防空威脅最大的當屬臨近空間高超聲速武器。臨近空間高超聲速目標包括高超聲速巡航導彈(速度3.5~7Ma)、高超聲速飛機(速度4~10Ma)、高超聲速空天飛行器(速度8~20Ma)等。臨近空間高超聲速目標能夠在稀薄大氣層作持續的高超聲速飛行,具有飛行速度快、機動性高、投送能力強、突防能力好等特點,能夠實施高空偵察、臨空轟炸、遠程快速精確打擊時敏目標,甚至執行1h之內全球打擊,即“全球常規快速打擊(CPGS)”。
2010年美國相繼開展了 X-37B、HTV-2和X-51A等臨近空間高超聲速飛行器試驗,這些試飛事件標志著美國空軍將以無人駕駛可重復使用的高超聲速飛行器,把在藍色天空開展的情報收集、目標攻擊與通信等任務向黑色太空的空天領域推進,美國正基于這種手段謀求核武器和高超聲速飛行器雙重戰略威懾能力。根據美軍發展計劃,臨近空間高超聲速巡航導彈、助推滑翔(巡航)類導彈和臨近空間高速無人機等將在2015年前后裝備部隊,臨近空間軌道再入飛行器也將在2020年左右具備作戰能力。
臨近空間高超聲速飛行器的出現,模糊了傳統的戰略導彈與戰術導彈的區別,削弱了傳統的戰略縱深在國土防御中的作用。為應對即將出現的威脅,加強對臨近空間的探測已經成為必然趨勢。對于雷達系統而言,研發針對臨近空間高超聲速武器的跟蹤技術勢在必行。
目前,國內對于臨近空間目標的跟蹤技術研究尚處于起步階段,關欣等[2]對臨近空間目標跟蹤做了概述,提出一些改進跟蹤算法的思路,但沒有給出工程應用的跟蹤算法;李昌璽等[3]提出了一種自適應不敏卡爾曼濾波算法,給出了一類簡單軌跡的跟蹤分析,但是缺乏對不同飛行軌跡跟蹤算法性能的探究。由于臨近空間高超聲速飛行器具備重要的戰略價值,國際上公開介紹這類目標的跟蹤方法更是稀缺。針對臨近空間高超聲速目標跟蹤的問題,本文提出了一種衰減記憶的最小二乘跟蹤方法。新方法不需要對目標運動方程或是機動加速度提出任何先驗假設,不存在運動方程失配導致濾波發散的風險,比依賴運動方程的跟蹤方法具有更強的魯棒性。
1 臨近空間高超聲速目標跟蹤方法
1.1 傳統濾波方法面臨的困難
國內外雷達數據處理多采用α-β濾波、卡爾曼濾波、自適應卡爾曼濾波或者交互多模型等方法,在濾波過程中使用勻速(CV),勻加速(CA),Singer,勻速轉彎(CT)等運動模型[4]。這類數據處理技術往往只能實現3Ma以下速度的目標跟蹤。同時卡爾曼濾波及其衍生濾波方法的精度嚴重依賴目標運動模型的選擇,當目標運動模式與濾波模型匹配時,算法精度高;當目標運動模式與濾波模型不匹配時,算法精度大幅下降,甚至導致濾波器發散、目標失跟。
而在臨近空間目標的跟蹤中,雷達需要面對的是具有20Ma以上的速度,具有高機動能力、種類繁多的對象。總體上,臨近空間高速目標可分為超高速巡航導彈、超高速無人飛機、軌道式再入飛行器3類。其飛行軌跡可以歸納為圖1所示的2類典型飛行特征[1]。
由于國外的技術封鎖,目前我國對臨近空間高速目標飛行軌跡的認識僅止于仿真實驗的階段,沒有精確的數學模型可用于研究。所以,依賴跟蹤模型的卡爾曼類算法在工程應用中魯棒性不強,具有濾波發散的風險。
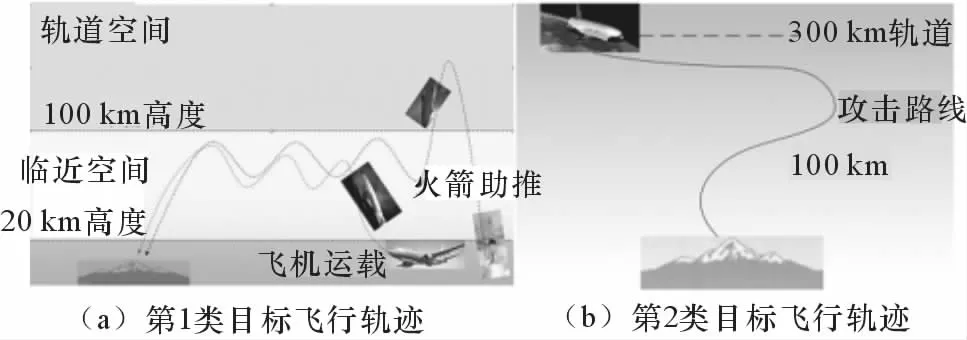
圖1 臨近空間目標2類典型飛行軌跡示意[1]
1.2 最小二乘濾波算法
最小二乘濾波算法是一種批處理算法,適合于處理運動模型不能精確確定的目標跟蹤問題。
根據文獻[5],設對某一運動過程y(t)進行了n次測量,得到1組測量值{~yi},i=1,2,…,n。~yi用來表示在ti時刻得到的y(ti)的量測值。由于在量測中存在隨機誤差,假定~yi=y(ti)+ei,其中ei是不相關的隨機誤差,其期望值為0,方差為σ2。令:

式中:E(e)為e的期望值;E(eeT)為e的斜方差。
最小二乘方估計可以寫成:

根據計算,最小二乘方估計^a為:

其協方差矩陣為:

1.3 衰減記憶的最小二乘濾波方法
最小二乘濾波方法對于目標的運動模型和機動輸入的統計特性不需要先驗的假定,適合對運動方式難以精確刻畫的目標做跟蹤。常規的最小二乘濾波在對當前時刻的目標狀態進行濾波時計算了所有的歷史量測點,但是由于臨近空間超高聲速目標速度快,機動能力強,最小二乘濾波這種全局批處理的模式會延遲算法對目標機動的響應,導致機動段跟蹤誤差的擴大。顯然,原始的最小二乘濾波不適合直接應用到機動性強的臨近空間目標跟蹤。基于上述情況,改進了最小二乘濾波算法,只對距離當前時刻一定時間間隔內的量測點進行批處理,而更早的歷史點跡不計入批處理計算,形成衰減記憶最小二乘濾波方法。該方法既保留了最小二乘濾波魯棒性強的優點,又通過使用局部歷史點對當前量測進行濾波,避免了使用全局數據導致的機動響應延遲。
衰減記憶最小二乘跟蹤方法如下:
每次獲得新的量測點跡M(i),
(1)使用三維修正無偏量測轉換,將雷達極坐標系的量測點跡轉換到雷達直角坐標系;
(2)根據衰減記憶歷史,選取局部歷史量測點跡 M(i-k+1),…,M(i)作為輸入的量測數據,使用最小二乘方估計方法計算當前濾波點的X,Y,Z位置;
(3)將(2)計算出的X,Y,Z坐標反算回雷達極坐標系。
在使用衰減記憶最小二乘時,X,Y,Z坐標相對時間的多項式是一階的,記憶長度離線設定。
2 仿真實驗
實驗采用Matlab(2008a)軟件進行仿真計算。根據文獻描述[6-7]的方程,仿真生成了臨近空間高超聲速飛行器在6Ma速度和20Ma速度的飛行軌跡,并在2Hz數據率下分別進行了跟蹤實驗。仿真雷達探測距離精度50m,方位精度0.2°,仰角精度0.15°生成量測數據。實驗采用蒙特卡羅仿真(獨立運行100次)分析跟蹤濾波結果。
2.1 實驗場景一
最高速度6~8Ma速度的目標仿真。取關機點參數為以下值:
速度:Vk=2.0km/s;
航跡傾角:γk=45°;
航跡方位角:χk=90°;
高度:hk=50km;
經度:λk=120.321 1°;
緯度:φck=33.804 5°;
雷達最遠觀測距離:1 200km。
飛行器以6~8Ma速度飛行,運動軌跡和濾波航跡如圖2所示。在雷達觀測范圍內,飛行器以近似正弦波軌跡飛行,經歷了2個波峰和1個波谷。從圖上看,濾波航跡圍繞在真實航跡的周圍,濾波效果較好。
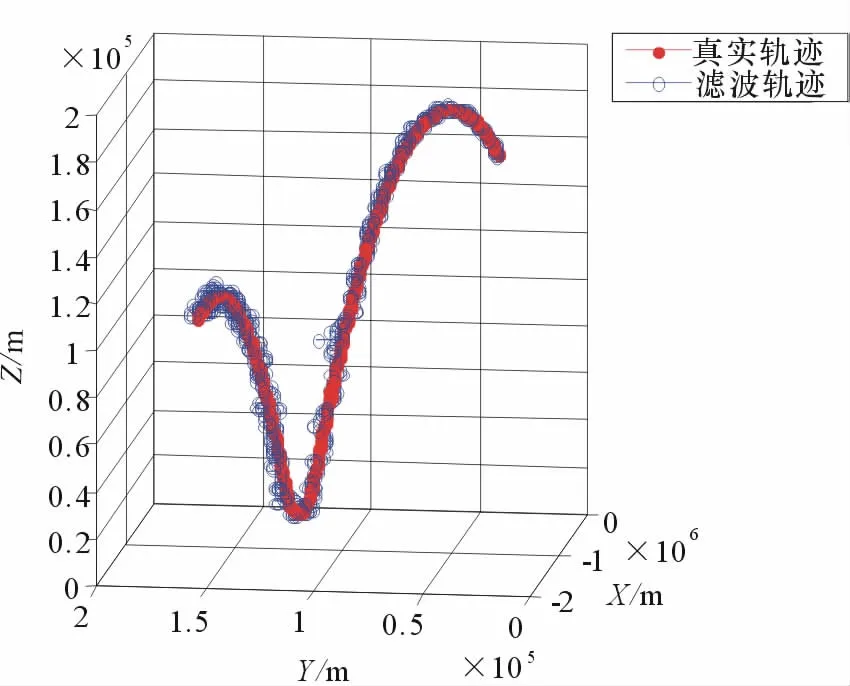
圖2 實驗場景1的濾波航跡與真實軌跡
圖3的3個子圖分別是濾波航跡在X,Y,Z 3個維度上的距離均方根誤差值,其中圈號線是濾波位置均方根誤差曲線,加號線是量測的位置均方根誤差曲線。可以看到衰減記憶的最小二乘濾波在跟蹤到第20步開始收斂,在整個跟蹤過程中濾波誤差明顯小于量測點跡在各個維度的誤差。
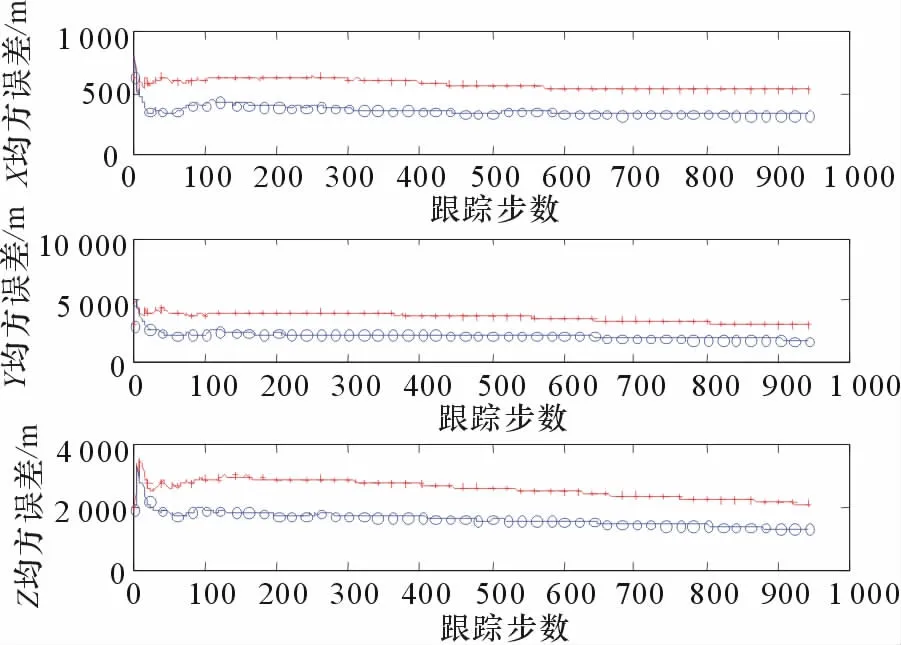
圖3 實驗場景1濾波航跡的位置均方誤差
2.2 實驗場景2
最高速度20Ma以上的目標仿真。取關機點參數為以下值:
速度:Vk=6.8km/s;
航跡傾角:γk=45°;
航跡方位角:χk=90°;
高度:hk=100km;
經度:λk=120.321 1°;
緯度:φck=33.804 5°;
雷達最遠觀測距離:1 200km。
20Ma目標的運動軌跡和濾波航跡見圖4,飛行器向下飛行經歷波谷后向上飛行。與場景1相比,場景2的拐彎段的軌跡更加陡峭。可以看到,對20Ma目標,濾波算法保持了穩定跟蹤。
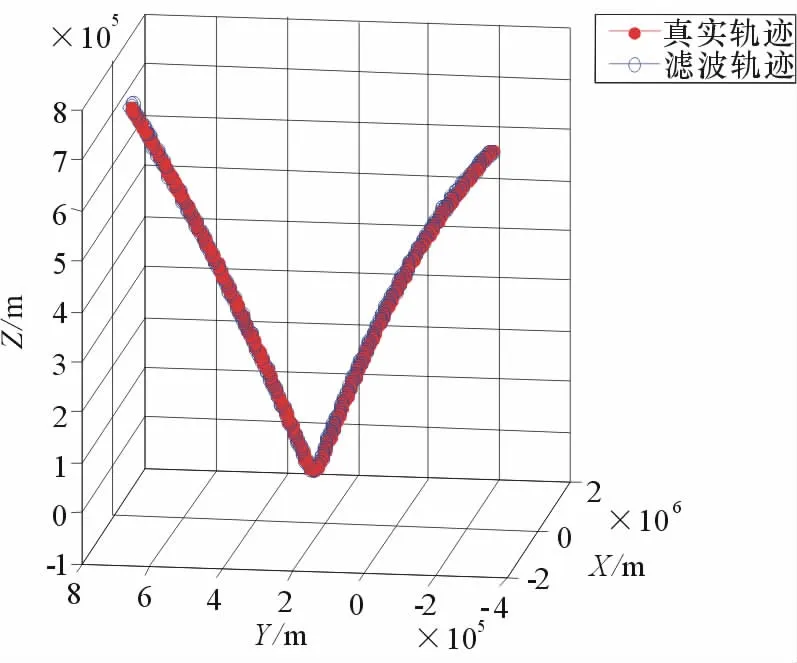
圖4 仿真場景2的濾波航跡與真實軌跡
圖5是濾波航跡在X,Y,Z3個維度上的距離均方根誤差值。濾波算法在第20步附近收斂,在整個跟蹤過程中濾波誤差小于量測點跡在各個維度的誤差,跟蹤濾波的收益比場景1略小。
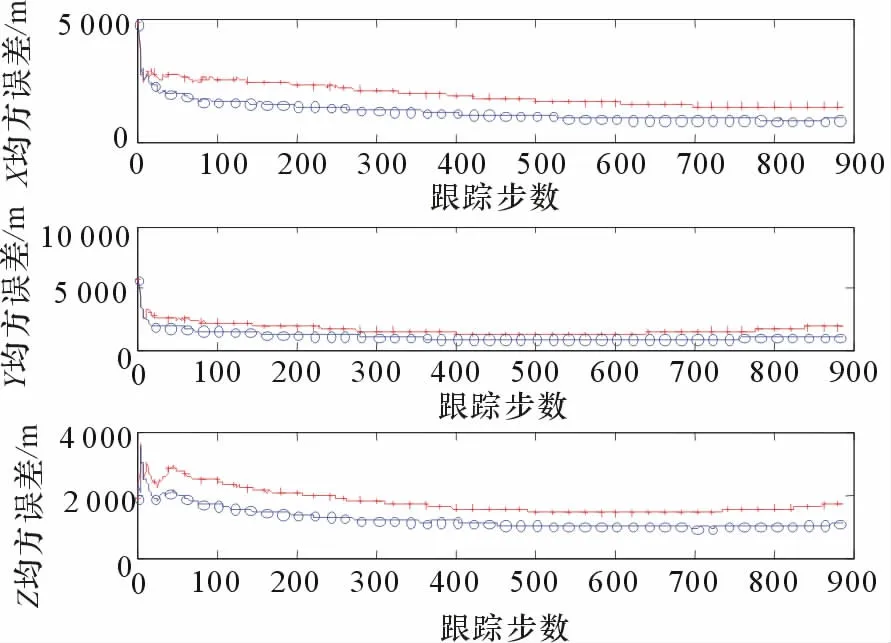
圖5 仿真場景2濾波航跡的位置均方誤差
表1記錄了衰減記憶的最小二乘濾波算法反算回雷達極坐標系的全局距離均方根誤差和全局方位均方根誤差。在跟蹤6Ma目標時,濾波算法距離誤差比量測減小32.8%,方位誤差減小38.1%,仰角誤差減小40.0%;跟蹤20Ma目標時,濾波算法距離誤差減小35.9%,方位誤差減小40.0%,仰角誤差減小33.3%。
從實驗結果來看,無論6~8Ma還是20Ma的高超聲速臨近空間目標,本文提出的衰減記憶最小二乘濾波算法都可以實現穩定跟蹤。對于目標飛行的機動段,衰減記憶最小二乘濾波跟蹤連續光滑。相比于量測數據,新算法在距離、方位、仰角都獲得了超過30%的精度提高。
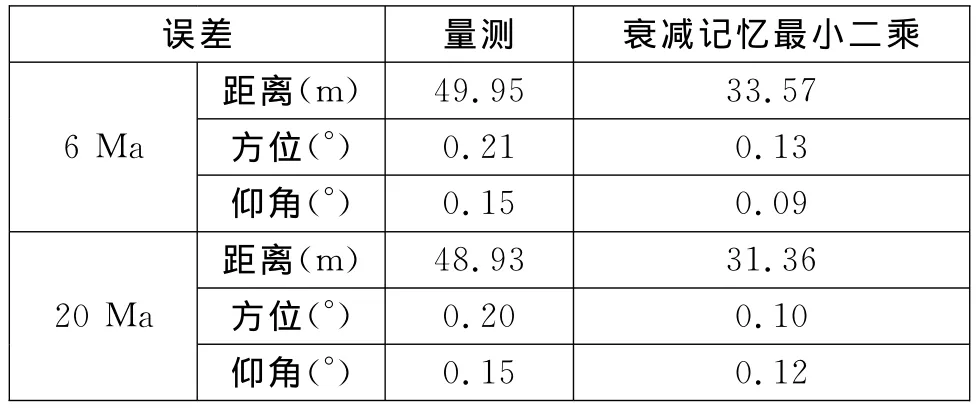
表1 衰減記憶最小二乘算法的均方根誤差對比
3 結束語
臨近空間高超聲速目標數據處理與常規雷達數據處理最大的不同是跟蹤高速高機動目標,高超聲速飛行器的運動速度可能達到20Ma以上。空間目標的運動一般是有規律的,而臨近空間高超聲速飛行器在機動能力和突防能力上有突出的特點。因此,受限于特定運動模型的卡爾曼類濾波算法在跟蹤臨近空間高超聲速目標時,有運動模型不匹配濾波發散的風險,魯棒性不強。
針對上述問題,本文提出了一種衰減記憶的最小二乘濾波算法。該算法以最小二乘為基礎,考慮到目標高機動特性,每獲得一個量測,就以時間維度的局部量測值作為算法的輸入進行迭代濾波。仿真實驗表明,新算法能穩定跟蹤6Ma與20Ma目標,目標機動段跟蹤連續光滑,距離、方位、仰角的跟蹤精度較高。同時新算法不需要預設運動方程,魯棒性強。
[1]張國華.臨近空間目標探測分析[J].現代雷達,2011,33(6):13-19.
[2]關欣,趙靜,何友.臨近空間高超聲速飛行器跟蹤技術[J].四川兵工學報,2011,32(8):4-6.
[3]李昌璽,畢紅葵,王紅,等.一種臨近空間高超聲速目標跟蹤算法[J].航天電子對抗,2012,28(4):10-13.
[4]何友,修建娟,張晶煒,等.雷達數據處理及應用[M].北京:電子工業出版社,2009.
[5]徐振來.相控陣雷達數據處理[M].北京:國防工業出版社,2009.
[6]肖業倫.航空航天器運動的建模——飛行動力學的理論基礎[M].北京:北京航空航天大學出版社,2003.
[7]孫勇,段廣仁,張卯瑞,等.高超聲速飛行器再入過程改進氣動系數模型[J].系統工程與電子技術,2011,33(1):134-137.
猜你喜歡
現代裝飾(2021年6期)2021-12-31 05:29:04
小學生優秀作文(高年級)(2021年10期)2021-11-02 03:05:24
華人時刊(2020年15期)2020-12-14 08:10:44
學苑創造·A版(2020年10期)2020-11-06 05:21:26
華人時刊(2017年13期)2017-11-09 05:38:52
作文周刊·小學一年級版(2016年27期)2017-06-03 23:21:17
絲綢之路(2016年9期)2016-05-14 14:36:33
新湘評論·下半月(2016年4期)2016-05-05 22:12:41
新湘評論·下半月(2016年4期)2016-05-05 22:12:41
海外文摘(2016年4期)2016-04-15 22:28:55