基于MEMS的GPS/SINS艦船組合導航系統設計
2013-08-11 01:48:26薇廖林煒
船舶 2013年1期
關鍵詞:系統
郭 薇廖林煒
(1.海軍駐武漢438廠軍事代表室 武漢430064;2.海軍駐中南地區光電系統軍事代表室 武漢430073)
0 引 言
GPS/SINS組合導航系統是組合式慣性導航系統中的一種重要類型,它包括捷聯慣性導航系統(Strap-down Inertial Navigation System,SINS)和全球定位系統(Globe Position System,GPS)兩個部分。其中,GPS易受地形地物的影響而導致定位中斷,并且受制于人;SINS導航精度高、自主性強、隱蔽性好,但定位誤差隨時間積累。GPS和SINS這種互補的特點使得兩者的組合有很好的效果,并且可以廣泛應用于艦載導航、機載導航和提高反艦導彈的精確制導效率等場合[1-2]。
MEMS(Micro Electro Mechanical System)即微機電系統,是指可以批量制造的,集微型結構、微型傳感器、微型執行器以及信號處理電路、接口、通訊和電源于一體的微型器件或系統。它以硅半導體材料為加工對象,采取專用集成電路制造技術把功能強大、復雜可靠的系統置于一個小小的硅片上,從而極大地拓寬了其設計及運用空間。自上世紀80年代MEMS概念被提出以來,MEMS技術在汽車工業、生物醫學、航空航天等領域得到了廣泛應用。隨著MEMS技術的不斷發展,微型慣性導航器件體積越來越小,精度越來越高。這就使得加速度計和陀螺儀安裝在載體上變得簡單易行,從而使GPS/SINS組合導航系統的可行性大大提高。一直以來,海軍艦艇對導航的要求是在海洋的任何一個區域長時間工作,這就對導航的精度和穩定性有著很高的要求。本文設計的基于MEMS的艦船慣性導航系統恰好滿足了這一需求。
1 原理和結構
1.1 捷聯式慣導系統
捷聯式慣導系統將加速度計和陀螺儀的基座與載體直接固聯,載體轉動時,加速度計和陀螺儀的敏感軸指向也隨之轉動。系統通過陀螺儀測量載體的角運動,計算得到載體的姿態角,確定加速度計敏感軸的指向;通過坐標變換,將加速度計輸出的比力信號轉換到另一計算比較方便的導航坐標系上,進行導航計算。與平臺式慣性導航系統相比,捷聯式慣導系統沒有復雜的機械式慣性平臺,結構簡單,體積小,成本低,容易安裝與維護。捷聯式系統也存在明顯缺點:陀螺儀和加速度計直接安裝在載體上,要承受較大的振動和沖擊且工作的動態范圍較大,因此需要有高精度的陀螺儀和進行捷聯陀螺的誤差補償才能保證系統的穩定與可靠,同時計算量大,精度較低。
1.2 GPS/SINS組合導航系統
GPS是以人造衛星為基礎的無線電導航系統,在地球的任何位置、任何時刻只要能同時觀測到4顆以上的衛星,就可以得到用戶的三維坐標、三維速度分量和精確定位,其精度不隨時間變化而變化。因此,可以將高精度的GPS信息作為外部量測輸入,在載體的運動過程中頻繁修正SINS以控制其誤差隨時間的積累,通過此法可大幅度提高微慣性測量的精度。這就是基于MEMS的GPS/SINS組合導航的基本思想,其設計系統結構如圖1所示。
該系統包括捷聯慣導系統和GPS系統兩部分。捷聯慣導系統(SINS)是其核心部分,包含3個微激光陀螺和3個微加速度計,可將GPS部分的數據通過卡爾曼濾波器輔助系統對捷聯慣導進行修正。另外將微加速度計和微陀螺儀安裝在轉位機構上,一方面可以隔離系統受艦船運動的影響,另一方面作為船塢對準中的一個部分,易于對單個傳感器進行標定[3]。

圖1 基于MEMS的GPS/SINS艦船導航系統結構框圖
2 設計關鍵技術
2.1 SINS系統的計算
為從微陀螺儀及加速運動計的測量值中提取姿態、位置、速度的信息,需對SINS系統參數進行求解,包括姿態確定、比力分解和導航方程等的解,計算框圖如圖2所示。其中姿態計算和導航計算是技術中較難實現的部分。
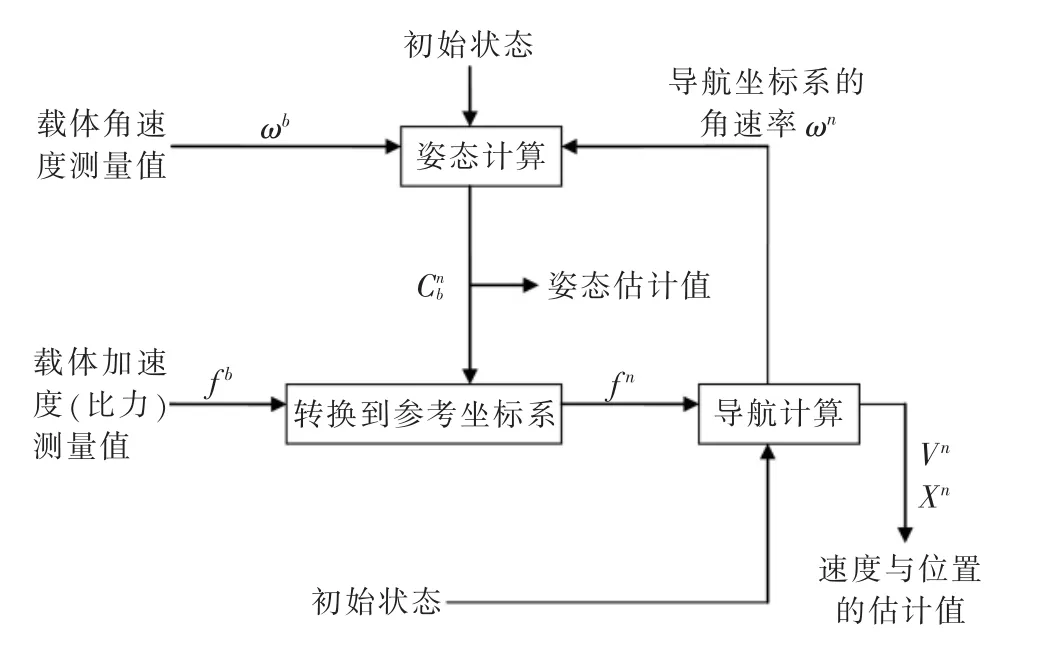
圖2 SINS系統計算框圖
2.1.1 姿態估計
運載體相對于一個坐標系的姿態對導航起著至關重要的作用,通過使用微陀螺儀提供的回轉速率測量值,可以不斷更新運載體的姿態值。姿態表達式的一般形式有方向余弦表達式、歐拉角表達式和四元數表達式。
方向余弦陣是一個3×3的矩陣,矩陣的列代表單位矢量在載體系中沿參考軸系的投影,可表示為式(1):

其中第i行和第j列的元素代表參考系i軸和載體系j軸之間夾角的余弦。
歐拉角的表示法是基于坐標變換時繞軸的旋轉實現的,例如從參考軸系到新坐標系的轉換過程中,繞參考系z軸旋轉ψ角;繞新坐標系y軸旋轉θ角;繞新坐標系x軸旋轉φ角。其中θ,ψ和φ為歐拉旋轉角。從參考系到運載體軸系的轉換可表述為式(2):

四元數姿態表達式是基于坐標轉換時可以用定義在參考坐標系的一個矢量的單個旋轉來實現,四元數表示為,將載體系上的矢量用四元數來表示,通過公式即可得到參考系上的表示為=C,其中

2.1.2 導航計算
以導航坐標系為基準,導航方程可表示為式(4):

通過導航計算可以實時獲得運動載體的運動速度,參與SINS系統計算。
2.1.3 數據獲取
通過以上計算和估計,按照圖1中的步驟完成GPS與MEMS捷聯系統的組合導航解算,獲得定位信息,另外通過誤差補償進一步提高定位信息的精度。
2.2 誤差補償
MEMS中的微加速度計精度要求已很高,如加速度芯片ADXL250標度因數為38 mV/g,在±1g范圍內靈敏度為0.0380 mV/g,線性度為0.73%,基本滿足艦船系統的導航要求。事實上,陀螺儀誤差才是影響系統性能和精度的重要方面,這部分誤差包括系統誤差和隨機游走誤差。其中系統誤差可以通過轉位程序對陀螺進行標定,這需要用到卡爾曼濾波。從圖1可以看出,接收位置(緯度/經度)信息,并與慣導系統得到的精度和緯度的估計值進行比較,該差值作為卡爾曼濾波器的輸入信息,通過卡爾曼濾波器后給出系統誤差狀態的估計值來修正系統。
3 應用前景
基于MEMS的GPS/SINS艦船慣性導航系統融合了GPS系統和慣性導航系統的優點,是一種新型的組合導航方式,可廣泛應用于航空、航天、航海等方面,且整套系統具有可靠性高、實時性強、微小型等特點,在軍用和民用領域具有廣闊的應用前景。
4 結 論
本文所設計的基于MEMS的GPS/SINS艦船導航系統充分利用了MEMS導航設備的精度高、體積小、成本低等優良特性,實現了自主式慣性測量,且隱蔽性好、重量輕,在GPS的輔助下具有更可靠的準確性,為未來艦船導航提供了一個重要的發展方向。
[1]劉愛元,李彪,祝萌.卡爾曼濾波在某型組合導航系統模擬器中的應用[J].海軍航空工程學院學報,2005,20(1):127-129.
[2]段鳳陽,常麗敏.某型飛機航姿系統綜合檢查儀的研究與設計[J].計算機測量與控制,2006,14(5):698-700.
[3]MARLAND P.The NATO ships inertial navigation system(SINS)[J].Journal of Naval Engineering,1992,33(3):688-700.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
