一種具有MPPT系統的光伏三階段充放電控制器的研究
2013-09-01 02:15:20陳建偉
電氣技術 2013年9期
陳建偉
(許繼變壓器有限公司,河南 許昌 461000)
對于一些孤島、偏遠的山區或移動發射基站,其能量的供應不能夠從電網獲得,因此需要配備專門充電供電電源,供生活或移動基站的正常工作所用。由于分布式發電特別是光伏發電技術的發展給這些地區帶來方便。光伏發電可以做大功率的并網發電,同時也可以單獨構成獨立發電系統對負載進行供電。獨立光伏發電系統的最基本組成如圖1所示。蓄電池可以通過充放電控制直接連接直流負載或者對蓄電池進行充電后再經過逆變器對交流負載供電。從圖1可以看出無論是通過控制器的直流供電系統還是通過蓄電池并聯后經逆變器構成的交流供電系統,充放電控制器和蓄電池都是的光伏供電系統重要組成部分。充放電控制器主要實現把蓄電池不穩定的直流電壓對蓄電池進行充電,同時完成對光伏電池對蓄電池進行充電時的最大功率點進行跟蹤。因此光伏充放電控制器在整個獨立供電系統起到至關重要的作用。其性能直接影響整個系統的安全性、可靠性、穩定性以及效率。設計出性能良好的控制器是整個供電系統成功的關鍵點之一。
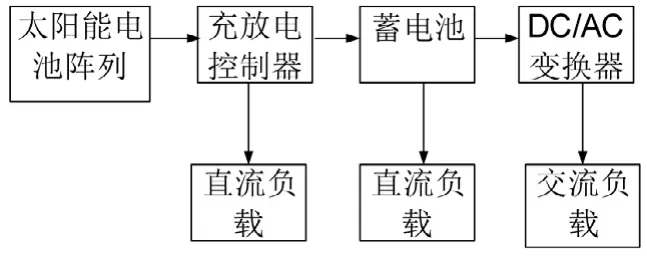
圖1 獨立光伏發電系統基本構成框圖
1 充放電控制器的主電路及工作原理
在蓄電池充放電控制器采用的主電路類型主要有 Buck型、Boost型以及 CUK型變換電路.Buck電路主要實現降壓變換,Boost電路主要實現升壓變換而CUK變換器主要實現升降壓變化。根據光伏電池以及蓄電池特性選擇主題為Buck電路較為合適。圖2為采用Buck電路構成的蓄電池充放電控制器的主電路圖。其中 PV1代表光伏電池板,D4為功率二極管或專門制作的匯流箱,可以用來保證蓄電池不能反向對光伏電池板放電,電感L以及電容C為輸出濾波器件,V3為放電或負載開關,V2為同步整流管。從圖2可以看出光伏電池發出的能量經過Buck變換器后一方面直接對蓄電池進行充電把能量儲存起來,同時還可以對負載進行供電。在夜晚或陽光不是很充足的情況下,蓄電池還可以通過開關器件V3對負載進行供電。

圖2 充放電控制器的主電路圖
2 電控制器最大功率實現方法及控制策略
光伏控制器關鍵技術是在實現三階段充電控制的同時實現對光伏發電的最大功率點進行跟蹤。通過檢測充電電流以及蓄電池端電壓實時調節開關管的占空比來實現對光伏電池工作電壓的調整,從而達到對最大功率點進行跟蹤的目的。蓄電池充電階段分為全沖、恒壓以及浮充,在充電的第一階段其端電壓一直上升,在第二階段蓄電池電壓端電壓保持不變,并且在第一、第二階段充電電流始終要大于1%的蓄電池容量。第三階段,蓄電池充電電流很小,但其端電壓在充電過程中會有所下降。根據充電特征繪制其充電控制系統的流程圖如圖3所示。從流程圖可以看出在充電的三階段過程中只對第一階段進行最大功率進行跟蹤,其余階段不進行跟蹤。同時蓄電池在充電過程中,當溫度過高會出現蓄電池不能充滿或溫度過低時會出現蓄電池過沖現象。為了延長蓄電池的使用壽命,在充電過程的第二、第三階段必須對蓄電池的充電電壓進行補償。在實際執行過程中,當溫度高于25℃時降低充電電壓;當蓄電池溫度低于25℃時提高充電電壓。
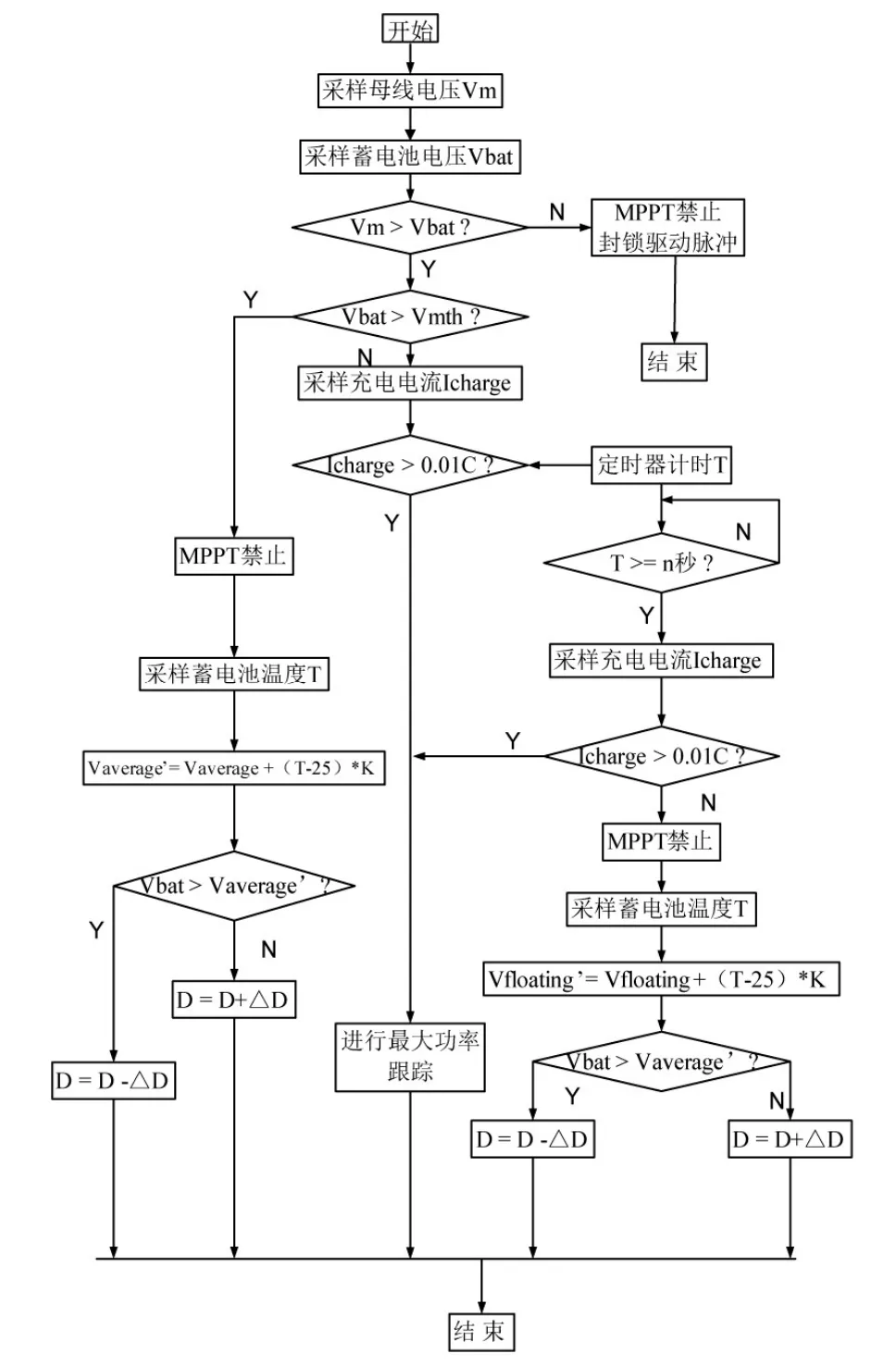
圖3 帶有MPPT的三階段充電控制流程圖
3 控制器的主電路參數計算及器件的選擇
控制器實現的是對48V/60A的蓄電池組進行充放電控制,光伏組件選擇單塊電池板的開路電壓為21.5V,單塊電池板的短路電流為5.1A.考慮光伏系統的配置性價比以及發電效率,選擇光伏組件4組串聯的光伏電池板串聯后,再14組并聯使用,可以滿足要求。為了設計和選型的方面,功率管 V1、V2、V3選擇相同的功率 MOSFET。功率管上所承受的穩態電壓最大值大約為 90V,流過開關管中的電流最大值為 60A左右,因此選擇型號為SUB85N104的功率管并聯,完全滿足要求。為了保證在充電第一階段實現最大功率跟蹤時電流的波動較小,一般選擇工作電流的10%,功率管的頻率設計為 60kHz,Buck最佳的占空比為 0.6,同時導通時不考慮V2上的壓降,計算出:

可選擇150μH濾波電感即可滿足要求。電容器C主要用來濾掉高頻信號,可以選擇300V/1μF的無極性電容器即可滿足要求。
4 續流二極管的同步整流
由于充電控制器的額定電流可以達到 60A,如采用普通的電力二極管作為Buck的續流二極管。電力二極管自身的管壓降較大,一般為0.7V左右,當使用電力二極管整流時,二極管上的損耗為
P=UI=0.7× 60 =42W
而使用同步整流時,采用4個完全一樣的功率管并聯使用時,功率管導通電阻為 0.0085Ω,當通過額定電流時,功率管上的損耗為
P=I2R= 602× 0.0085/4=7.65W
可見,采用同步整流技術能夠大大降低整流器件上功率損耗,特別當需要整流的電流較大時,使用同步整流技術對提高整個控制器的效率非常明顯。
5 仿真結果以及結論
一般1個光伏電池板在光照1000W/m2,環境溫度T=25℃時,其開路電壓為22V,其最大功率點的電壓16V左右,其短路電流5.6A,最大功率點電流為5.2A,為了能夠對48V60A的蓄電池進行充電,采用5個電池板進行串聯為1組,為了滿足充電電流的要求,再把這樣16組串聯的光伏電池板并聯連接在一起。針對這種光伏充電器的工作環境,在Matlab/Simulink環境下,建立充電模型。
圖4為進行最大功率跟蹤的仿真波形,圖5為蓄電池充電時 Buck電路驅動電壓以及充電電流波形。從圖 4可以看出對于光伏電池的最大功率的跟蹤速度以及跟蹤效率均可滿足要求,圖5為蓄電池在第一階段的充電電壓以及Buck變換器中開關管驅動電壓波形以及電感中的電流波形,仿真波形與理論分析完全一致。可見所采取的充電控制措施器件的參數選擇是完全正確的。

圖4 光伏電池組最大功率跟蹤曲線
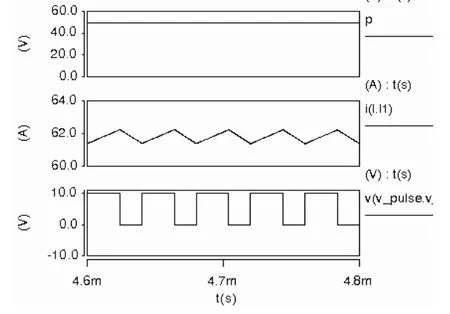
圖5 蓄電池充電電壓、電感電流及驅動電壓波形
[1] 徐德鴻.電力電子系統建模及控制[M].北京:機械工業出版社,2006.
[2] 置鐵生,張潤和,田立欣.小型風力發電系統最大功率控制擾動法及狀態平均建模與分析[J].太陽能學報,2006,27(8):828-834.
[3] 劉立強,岑長岸,張淼.弱光下光伏充電器的設計[J].控制理論與應用,2008,25(2):367-368.
[4] 韓志強,姚國興.新型光伏充電控制器[J].低壓電器.2010(18):11-13.
[5] 張海峰,沈媛萍.光伏充電控制器的研究[J].青海大學學報,2010,28(1): 22-25.
