管道特性對盾構推進缸位移影響的數值分析
2013-09-13 07:57:48夏毅敏謝敬華禹宏云朱湘衡
鄭州大學學報(工學版) 2013年1期
夏毅敏,何 利,謝敬華,禹宏云,朱湘衡
(中南大學機電工程學院,湖南長沙410083)
0 引言
盾構是一種集機械、電子、液壓、測量和控制等多學科技術于一體、專用于地下隧道開挖的重大工程裝備.推進系統是整個盾構的關鍵部分,主要承擔著盾構的頂進、轉彎、曲線行進、姿態控制、糾偏以及同步控制等[1-3].盾構在一定空間軸線的允許偏差范圍內前進,嚴格控制盾構掘進軸線定位走向與設計軸線一致是保證工程進度和施工質量的關鍵.隧道實際掘進軸線與設計軸線間的偏差大于30 mm時,即需要進行糾偏[4].盾構工作在時變非線性的負載工況,液壓推進缸端集成閥塊與液壓油源的距離較遠,可以達到幾十米甚至上百米.由于突變載荷和管路長,使得盾構液壓推進系統里的管道效應尤為顯著,如:響應滯后、壓力損失、系統振動等.傳統的盾構液壓系統分析理論由于不考慮管道特性的影響,給盾構推進缸的位移分析帶來了較大誤差.因此研究盾構液壓長管路閥控系統中管道特性是必要的[5-6].
筆者以海瑞克盾構液壓推進系統為研究對象,采用波動方程描述管路動態特性的影響,選用HL004管道分段集中參數子模型進行AMESim仿真,通過數值分析驗證不同管道結構參數下管道特性對盾構推進缸位移的影響規律.
1 基于AMESim的長管道閥控系統模型建立
1.1 流體管道非恒定流波動方程
對充液管道而言,二維管道模型對一般的工程應用有足夠的精確度,但是這種精確模型中含有復雜的貝塞爾函數和雙曲函數,給理論和仿真分析帶來極大的困難,而且模型中考慮了太多的細節問題,而這些問題對大多數工程應用而言是不必要的.低頻范圍內工作的液壓系統,管道一維流動集中參數模型就可以滿足工程應用要求.筆者所選用的管道模型HL004,不僅考慮管道的液阻和容腔效應的影響,而且考慮壓力波在管道內傳遞所帶來的管道液感的影響和與頻率相關的摩擦項的影響.其一維非恒定流動用管道分段集中參數波動方程描述為[7-8]
式中:f(Q)為與流量有關的摩擦阻力項;x為沿管軸的坐標距離;A為過流面積;α為壓力波速;K為流體有效體積彈性模量;ρ為流體密度.
1.2 推進液壓系統原理圖與基于AMESim的簡化仿真模型
推進液壓系統工作原理圖如圖1所示.盾構推進時,比例溢流閥4調節系統推進壓力;比例調速閥3調節進入系統的流量;二位二通換向閥2得電時短路比例調速閥3,實現推進液壓缸6的快速運動;三位四通換向閥1用來完成工作狀態的切換;在推進液壓缸6單獨退回時,平衡閥5能起到使推進液壓缸6運動平穩的作用.
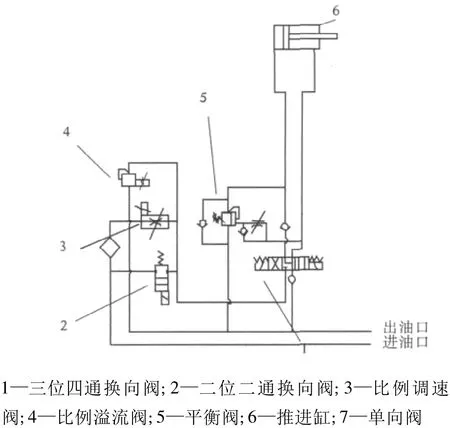
圖1 盾構液壓推進系統單缸工作液壓系統原理圖Fig.1 The hydraulic thrust system principle figure of shield machine
基于AMESim仿真軟件建立長管道閥控系統模型,結合管道數學模型,對液壓系統包括控制閥、液壓缸、油源、負載進行建模如圖2所示.其中比例調速閥、比例溢流閥、二位二通換向閥、三位四通換向閥與平衡閥做成集成閥塊,位于盾構前端靠近推進缸處,系統集成度高,集成塊與推進缸的管路較短,油箱與集成閥塊之間的管路很長,其管路是整個液壓系統中最長的管道.推進液壓系統在恒壓源工況,考慮到盾構推進過程中土體引起的附加應力極其復雜,采用線性黏彈性Kelvin簡化模型模擬土方負載[9].采用AMESim仿真軟件得出在不考慮液容、液阻、液感等管道特性時direct管道子模型下與考慮了管道特性,考慮了管道摩擦的分段集中參數管道模型時[10-11],HL004管道子模型下,盾構推進缸的位移的變化規律,并通過數值分析,得出考慮和不考慮管道特性時,不同管道結構參數下推進缸位移差的變化規律.
1.3 確定仿真參數
管道的仿真參數如表1所示.

圖2 盾構液壓長管道推進系統AMESim模型Fig.2 The AMESim model of long pipeline hydraulic thrust system of shield machine

表1 仿真參數Tab.1 Simulation parameters
2 管道特性對盾構推進缸位移的影響
仿真時推進缸活塞行程設定為1 m,推進缸在恒壓源下工作,其位移線性增加,考慮和不考慮管道特性時推進缸的位移值都達到推進缸設定活塞桿伸出行程.
2.1 不考慮管道特性時各參數對推進缸位移變化的影響
AMESim仿真時選用direct管道子模型,direct管道子模型不需設置管道參數,恒壓源與方向閥直接連接.其不考慮管道特性時,在F=80 kN巖土阻力下盾構推進缸位移變化如圖3所示,對應不同巖土阻力推進缸位移的變化如圖4所示.
2.2 考慮管道特性時各參數對推進缸位移變化的影響
AMESim仿真時選用HL004管道子模型,HL004管道子模型為分段集中參數模型,在不同管道結構參數及巖土阻力下推進缸位移變化如圖5所示.圖5(a)反映了管道越長,推進缸位移響應越慢,滯后越明顯;圖5(b)反映不同管壁厚,位移變化趨于一致,由于液壓源為恒壓源,管道直徑越大則系統壓力損失減小,液壓缸速度響應時間減少;圖5(c)反映了管道直徑越大,推進缸位移響應越快,滯后時間越短;圖5(d)反映了巖土阻力越大,推進缸位移響應越慢,滯后時間越長.
2.3 不考慮與考慮管道特性時對應的推進缸位移差變化規律
通過對應的不同管道結構參數和巖土阻力下,不考慮與考慮管道特性下推進缸位移求得差值,如圖6所示.

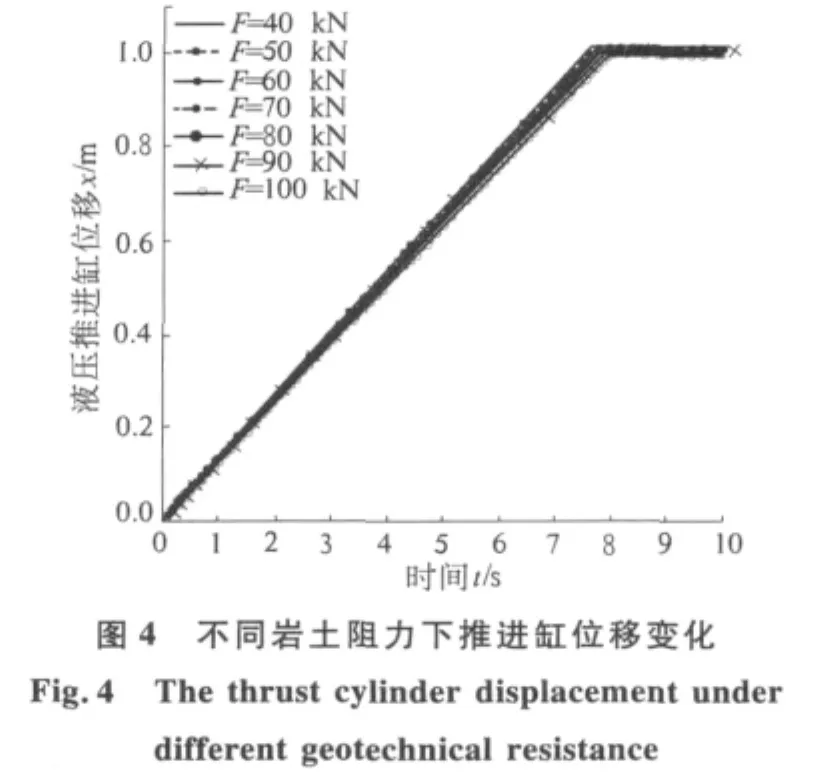
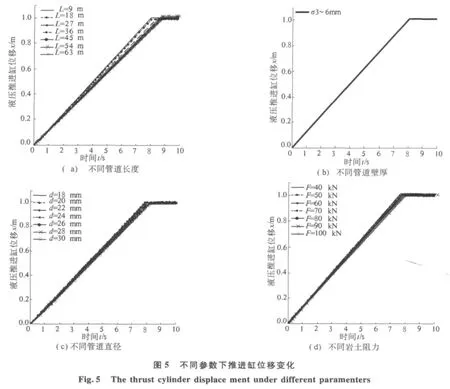

圖6 不同參數下推進缸位移差變化Fig.6 The trust cylinder displacement differcence under different parameters
由圖6得出,管道長度、管道直徑對推進缸的位移影響最大,管道壁厚及小范圍變化的巖土阻力對推進的位移影響比較小;隨著管道長度的增加,管道特性在推進缸位移上的體現越顯著,管道長度9~63 m變化時,其不考慮與考慮管道特性得出的推進缸位移差變化率控制在1.9%~11%范圍;隨著管道直徑的增大,管道特性在推進缸位移上的體現越不明顯,管道直徑18~30 mm變化時,其不考慮與考慮管道特性得出的推進缸位移差變化率控制在0.4%~4.8%范圍;不同管道壁厚和巖土阻力條件下,對應的不考慮與考慮管道特性時的推進缸位移差變化率大概控制在1.8%.
當盾構向前頂進,其隧道實際掘進軸線與設計軸線間的偏差大于30 mm時,即需要進行糾偏.通過數值分析得知,當不考慮與考慮管道特性得出的推進缸位移差為30 mm時,盾構需進行掘進糾偏.不同管道結構參數下,所對應的推進缸糾偏推進距離為表2所示.管道越長則糾偏推進距離越短,管道直徑對糾偏距離的影響很大.其他的管道結構參數與巖土阻力變化,不考慮與考慮管道特性得出的推進缸位移差控制在糾偏標準內,但是經過多次推進后,也會帶來很大的累積位移偏差.

表2 糾偏推進距離Tab.2 The correct thrusting diastance
3 結論
(1)筆者建立長管道波動數學模型,采用AMESim軟件建立了不考慮與考慮管道特性下精確的仿真模型,分析得出了不同管道結構參數與巖土阻力對盾構推進缸位移的影響.
(2)管道長度與管道直徑對盾構推進缸的位移影響最大,管道越長,推進缸響應越慢,滯后時間越長;管道直徑越大,推進缸響應越快,滯后時間越短.
(3)通過對不考慮和考慮管道特性得到的盾構推進缸位移差進行數值分析得出,管道長度和管道直徑是影響盾構推進糾偏距離的最關鍵因素.
[1]劉宣宇,邵誠.盾構機自動控制技術現狀與展望[J].機械工程學報,2010,46(20):152-158.
[2]ZHANG Kai-zhi,YU Hai-dong,LIU Zhong-po.Analysis for dynamic load behavior of shield thrust system considering variable boundary constraints[J].Intelligent Robotics and Applications,2009,5928:307-316.
[3]胡國良,龔國芳,楊華勇.基于壓力流量復合控制的盾構推進液壓系統[J].機械工程學報,2006,42(6):124-127.
[4]孫繼亮.盾構液壓推進系統的控制仿真研究[D].合肥:安徽理工大學機械工程學院,2006.
[5]楊務滋,王長春,王賀劍.管道效應對液壓沖擊器系能影響的研究[J].機床與液壓,2008,36(5):73-75.
[6]劉偉,楊華勇.高壓斷路器液壓操動機構管道特性研究[J].農業機械學報,2010,41(1):182-187.
[7]李洪人,陳照弟.新的液壓管路分段集中參數鍵圖模型及其試驗研究[J].機械工程學報,2000,36(3):61-64.
[8]田樹軍,張宏.液壓管路動態特性的Simulink仿真研究[J].系統仿真學報,2006,18(5):1136-1139.
[9]莊欠偉,龔國芳,楊華勇.盾構機推進液壓系統比例壓力流量復合控制仿真[J].液壓氣動與密封,2006,42(6):37-39.
[10]WANG Xiao-jian,MARTIN F L.Behavior of short lateral dead ends on pipeline transients:A lumped parameter model and an analytical solution[J].Journal of Fluids Engineering,2010,127:529-535.
[11]DRAGO M,GERHARD G,WITHOLD G.Verication of various pipeline models[J].Mathematics and Computers in Simulation,2000,53:303-308.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
