電液系統中新型反步自適應控制器設計*
2013-09-15 09:21:34袁朝輝
機電工程 2013年7期
袁朝輝,袁 鳴
(西北工業大學自動化學院,陜西西安710072)
0 引 言
反步設計方法是交叉選擇Lyapunov函數與反饋控制的遞歸過程,它將整個系統的設計問題分解為一系列低階(甚至是標量)子系統的設計問題。利用低階子系統或標量子系統存在的額外自由度,反步設計方法能在與其他方法相比更寬松的條件下求解穩定控制、跟蹤控制和魯棒控制問題[1]。由于反步法遞推系統的設計步驟,不僅可以處理非匹配不確定性,還可以處理帶有未知參數的非線性系統,反步法在不確定非線性系統控制設計領域引起了廣泛關注[2-7]。基于反步法的各種控制算法為一大類非線性系統提供了系統的跟蹤、鎮定控制策略設計框架。尤其當干擾和不確定性不滿足匹配條件時,自適應反步設計方法已經顯示出它的優越性。但反步設計方法也存在著明顯的缺陷:在遞推設計過程中需要對虛擬控制進行求導,雖然這在理論上不存在任何問題,但卻可能導致項數的膨脹最終使得每一步都很復雜,控制器的復雜程度隨著系統階數的增加而急劇增加[8-10]。近年來,基于反步設計思想,部分學者提出了多滑模控制方法,該方法在解決反步法計算膨脹問題上具有一定的效果,但為了克服不確定性必須增大各滑模增益,且各滑模的趨近軌跡無法得到保證。
本研究控制方法采用CMAC神經網絡在線估計系統的不確定性和虛擬控制導數項,有效解決在對虛擬控制進行求導時產生的計算膨脹問題;同時,在控制輸入前加入低通濾波器,使控制量連續化,消除滑模控制可能產生的抖振問題,使控制效果達到預期效果。
1 反步法原理
考慮如下類型的單輸入、單輸出非匹配不確定非線性系統:
首先,定義虛擬反饋誤差變量為:

式中:yd—期望系統輸出;z—n維虛擬誤差狀態變量)—待定虛擬反饋。
反步法對每一步構造一個Lyapunov函數,使每一步的虛擬誤差狀態分量zi漸近收斂于零,最終系統輸出y=x1,漸近收斂于期望系統輸出yd。
反步法實際上是一種由前向后遞推的設計方法,通過逐步迭代設計Lypaunov函數,最終實現系統的鎮定或跟蹤。反步法比較適合在線控制,能夠達到減少在線計算時間的目的。反步法中引入的虛擬控制本質上是一種靜態補償思想,前一個子系統必須通過其后子系統的虛擬控制才能達到鎮定目的,因此該方法要求系統結構必須是與式(1)類似的嚴參數反饋系統,或可經過變換化為這種類型的非線性系統。
2 電液力伺服系統的自適應反步控制
2.1 電液力伺服系統非線性數學模型
本節針對電液力伺服系統非線性數學模型,將反步設計算法與CMAC神經網絡相結合,設計了魯棒自適應輸出跟蹤控制器,有效地解決了運動擾動和系統參數不確定性問題,提高了載荷譜跟蹤精度。
假設期望輸出力軌跡為Fd,則由于F=Kt(xtxy),可知期望液壓缸位移輸出為xtd=Fd/Kt+xy,可通過設計控制律使得液壓缸輸出位移漸近跟蹤期望輸出位移,從而達到漸近跟蹤期望輸出力的目的。
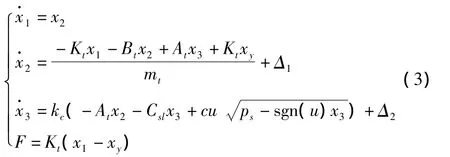
其中:
式中:Cv—滑閥節流窗口的節流系數;w—伺服閥的面積梯度,m;ρ—油液密度;sgn(·)—符號函數;pf—負載壓降;xt—加載液壓缸位移;xy—位置系統干擾位移;mt—負載等效質量;Kt—負載彈性剛度;Bt—粘性阻尼系數;At—加載液壓缸截面積;Ey—油液彈性模量;Vt—加載液壓缸等效容積;Csl—總泄漏系數;F—加載力。
2.2 自適應反步控制器設計
首先,設計CMAC神經網絡逼近不確定性:
式中:wi—理想權值向量—權向量的估計—誤差權向量,εi—逼近誤差。
定義虛擬反饋誤差:

當i=1時,x1d為系統期望輸出軌跡,x1d=xtd=Fd/Kt+xy;當i≠1時,xid為系統虛擬控制量,xi為系統實際狀態變量,i=1,2,3。
2.2.1 虛擬控制輸入量
定義Lyapunov函數為:

對其求導可得:

其中:
并取:

有下式:

設虛擬期望連續控制輸入為ud,定義實際控制輸入與期望輸入之間的誤差為z4=u-ud。
定義Lyapunov函數為:
對其求導可得:
其中:
并取虛擬控制輸入ud為:

2.2.2 低通濾波器設計

式中:τ—低通濾波器時間常數,v—低通濾波器輸入。且:

其中:
并取低通濾波器輸入v為:
其中:

3 仿真研究
為研究所提出的算法性能,筆者對其進行了仿真研究。系統仿真工具為Matlab/Simulink環境,仿真步長采用0.001 s固定步長,仿真算法采用四階龍格-庫塔函數。
電液力伺服系統為:

其中:
系統主要參數如表1所示。控制器主要參數為:k1=1 000,k2=16 000,k3=1 500,δ1=0.001,δ2=0.1,δ3=1 000,CMAC權值調整參數 β 為0.2,泛化參數 C為100,量化等級為10 000,低通濾波器參數 τ=0.002。仿真中,考慮電液伺服閥輸入電流飽和,其上、下限為±40 m。
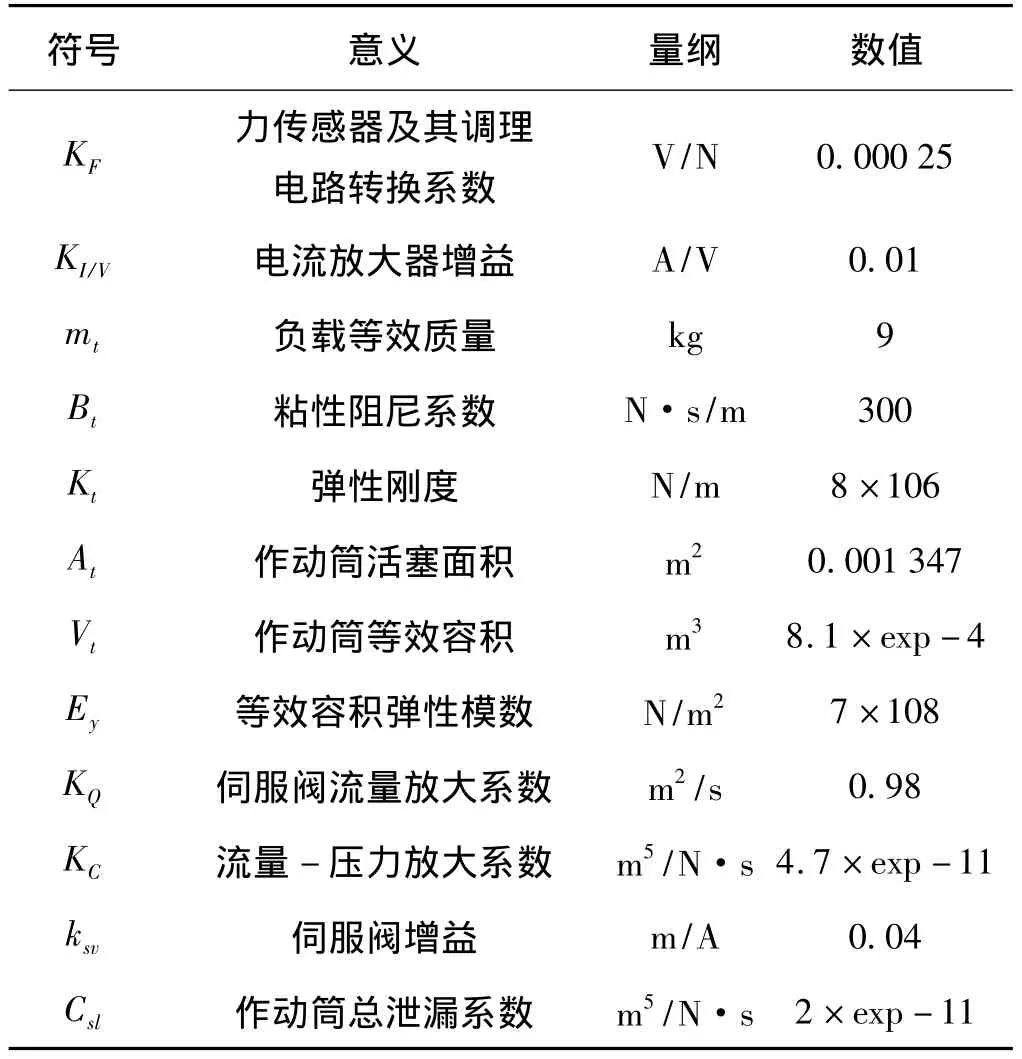
表1 電液力伺服系統主要參數
加載指令為0、舵機運動指令為60 sin(10πt)mm時產生的多余力仿真結果,如圖1所示。
由圖1可見,多余力不足50 N,本研究所提控制方法有效地抑制了舵機的運動干擾,且控制輸入連續無抖振。為考察該控制方法對輸入指令的跟蹤性能,筆者對某型舵機進行了氣動載荷加載仿真研究,某飛行試驗狀態下舵機載荷譜跟蹤的仿真結果如圖2所示。仿真中,舵機位移運動規律為60 sin(10πt)mm,加載力載荷譜為F=F0+FAsin(10πt)N的仿真結果。其中,F0、FA為與飛行狀態有關的量,5 500+3 000sin(10πt)N。

圖1 多余力仿真結果
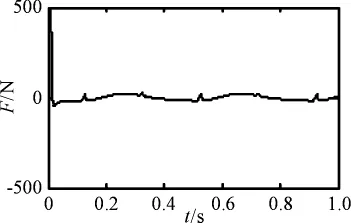
圖2 氣動載荷譜跟蹤誤差仿真結果
載荷譜跟蹤誤差如圖2所示。由圖2中仿真結果可見,本研究所提控制策略具有較高的跟蹤精度。為了進一步驗證該控制策略的魯棒性,令參數Csl為額定值的2倍,Bt為額定值的0.5倍,Ey為原來的70%,其仿真結果如圖3所示。
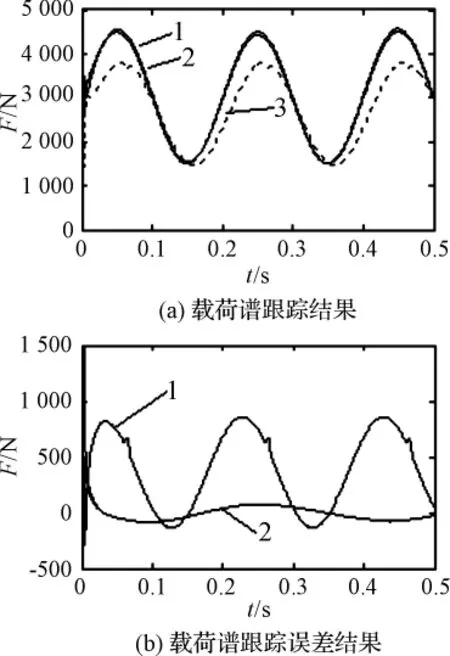
圖3 有、無CMAC時系統魯棒性驗證
圖3(a)中,曲線1為力載荷譜,曲線2為采用本研究控制策略時系統實際響應,曲線3為無CMAC時系統實際響應;圖3(b)中,曲線1為無CMAC時系統載荷譜跟蹤誤差,曲線2為采用本研究控制策略時系統載荷譜跟蹤誤差。由圖3仿真結果可見,無CMAC時參數不確定性使得原控制器對系統的控制效果變差,而有CMAC時自適應魯棒控制器有效抑制了參數不確定性對系統的影響,具有較高的載荷譜跟蹤精度。因此,本研究所提出的自適應反步法采用CMAC神經網絡在線學習系統不確定性,能夠確保系統在參數攝動情況下仍具有較好的控制性能。
4 結束語
本研究所提出的新型自適應反步控制算法采用CMAC神經網絡在線學習系統不確定性以及各階虛擬控制量的導數信息,從而避免了反步法在系統階次較高時引起的計算膨脹問題;該控制算法在遞推設計的最后一步加入非連續魯棒項,以克服CMAC神經網絡在線學習系統不確定性的殘余誤差,同時,在控制輸入前加入低通濾波器,使得符號函數產生的控制不連續項到達實際執行機構前連續化,能夠避免不連續控制輸入可能產生的抖振問題。另外,本研究將所提出的控制算法應用于電液力伺服系統,并進行了仿真驗證,仿真結果表明本研究所提出的控制算法能夠有效抑制系統不確定性,具有較好的指令跟蹤性能。
(References):
[1]王占林.液壓伺服控制[M].北京:北京航空航天大學出版社,1987.
[2]KHALIL H K.Nonlinear Systems[M].Prentice Hall,1996.
[3]LIN F J,SHIEN P H,CHOU P H.Robust adaptive backstepping motion control of linear ultrasonic motors using fuzzy neural network[J].IEEE Transactions on Fuzzy Systems,2008,16(3):676-692.
[4]FRANCESC P,FAYCAL I,JOSE R.Numerical issues in backstepping control:sensitivity and parameter tuning[J].Journal of the Franklin Institute,2008,345(8):891-905.
[5]HSU C F,LIN C M.Fuzzy-identification based adaptive controller design via backstepping approach[J].Fuzzy Sets and Systems,2005,151(1):43-57.
[6]NURKAN Y,YUKSEL H.Backstepping control of a vehicle with active suspensions[J].Control Engineering Practice,2008,16(12):1457-1467.
[7]OZBAY U,ZERGEROGLU E,SIVRIOGLU S.Adaptive backstepping control of variable speed wind turbines[J].International Journal of Control,2008,18(6):910-919.
[8]HUANG S J,HUANG K S,CHIOU K C.Development and application of a novel radial basis function sliding mode controller[J].Mechatronics,2003,13(4):313-329.
[9]張海鵬.魯棒滑模反步控制法及其在減搖鰭中的應用[D].哈爾濱:哈爾濱工程大學自動化學院,2004.
[10]吳玉香.滑模控制理論及在移動機械臂中的應用[D].廣州:華南理工大學自動化科學與工程學院,2006.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17