雙臂機(jī)械手在背光源設(shè)備中的設(shè)計(jì)應(yīng)用
2013-09-17 01:49:28郭曉蕾
電子工業(yè)專(zhuān)用設(shè)備 2013年10期
王 淳,郭曉蕾
(太原風(fēng)華信息裝備股份有限公司,山西太原 030024)
雙臂機(jī)械手在背光源設(shè)備中的設(shè)計(jì)應(yīng)用
王 淳,郭曉蕾
(太原風(fēng)華信息裝備股份有限公司,山西太原 030024)
通過(guò)對(duì)生產(chǎn)工藝的研究,針對(duì)設(shè)備的高精度,高效率,運(yùn)行平穩(wěn)的要求,提出了機(jī)械手臂合二為一的工作模式。減少了動(dòng)作重復(fù),提高了運(yùn)行效率。
背光源;機(jī)械手臂;效率
近年來(lái)由于液晶顯示器產(chǎn)業(yè)的迅猛發(fā)展,LCD產(chǎn)品不斷進(jìn)步,市場(chǎng)不斷擴(kuò)大。由于LCD本身是非發(fā)光性的顯示裝置,必須通過(guò)背光源才能達(dá)到顯示效果,因此背光源性能的好壞直接影響LCD顯示品質(zhì)。人們?cè)陉P(guān)注其生產(chǎn)工藝技術(shù)的同時(shí),也越來(lái)越關(guān)注LED關(guān)鍵設(shè)備的研發(fā)和改進(jìn)。背光源產(chǎn)業(yè)屬于勞動(dòng)密集型組裝產(chǎn)業(yè),耗工耗時(shí),加之近年來(lái)中國(guó)臺(tái)灣地區(qū)、日本、韓國(guó)主要背光源模塊廠商,都不斷在我國(guó)內(nèi)設(shè)廠,產(chǎn)業(yè)競(jìng)爭(zhēng)日益激烈,保證品質(zhì)的同時(shí)還要提高生產(chǎn)效率成為了眾生產(chǎn)廠商發(fā)展的瓶頸。因此,在自動(dòng)BLU疊合機(jī)的研發(fā)中,機(jī)械手臂的運(yùn)送效率是設(shè)計(jì)的核心環(huán)節(jié)。
1 背光源生產(chǎn)工藝介紹
背光源模塊主要由光源、導(dǎo)光板組成的半成品以及擴(kuò)散膜、增光膜和遮光膜組成(如圖1所示)。組裝時(shí)將各種膜放置在半成品內(nèi)壓合而成,為了達(dá)到一定的顯示品質(zhì),各層膜片疊放時(shí)務(wù)必達(dá)到一定的精確度。因此,人工生產(chǎn)無(wú)法保證疊放的一致性,導(dǎo)致了產(chǎn)品良莠不齊。
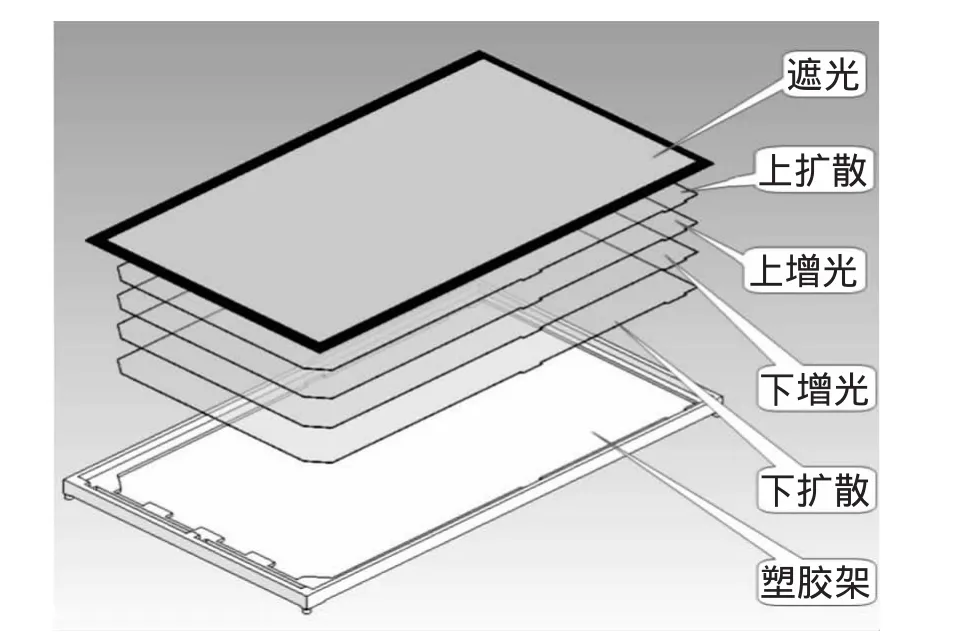
圖1 背光單元結(jié)構(gòu)示意圖
2 機(jī)械手臂的設(shè)計(jì)
機(jī)械手臂的作用是將從保護(hù)膜中自動(dòng)剝離出來(lái)的各種膜片從送料平臺(tái)上取放在定位平臺(tái),再?gòu)亩ㄎ黄脚_(tái)取放到半成品內(nèi),整個(gè)工藝流程需要機(jī)械手臂完成10個(gè)直線動(dòng)作。通過(guò)對(duì)生產(chǎn)工藝的研究以及對(duì)設(shè)備的整體配置的優(yōu)化,機(jī)械手臂的設(shè)計(jì)主要有3點(diǎn)要求:取放膜片速度快;取放膜片的精度高;運(yùn)行穩(wěn)定。
為提高運(yùn)送效率,提出了兩個(gè)步驟同時(shí)進(jìn)行的動(dòng)作方案,需要兩個(gè)機(jī)械手臂完成以下動(dòng)作(如圖2)。手臂1通過(guò)動(dòng)作1~5將膜片從料平臺(tái)運(yùn)送到定位平臺(tái),完成運(yùn)送后回到原點(diǎn)進(jìn)行下一次的運(yùn)送。手臂2繼續(xù)手臂1的工作將定好位的膜片通過(guò)動(dòng)作(6)~(10)從定位平臺(tái)運(yùn)送到半成品內(nèi),完成運(yùn)送后回到原點(diǎn)繼續(xù)手臂1的運(yùn)送。
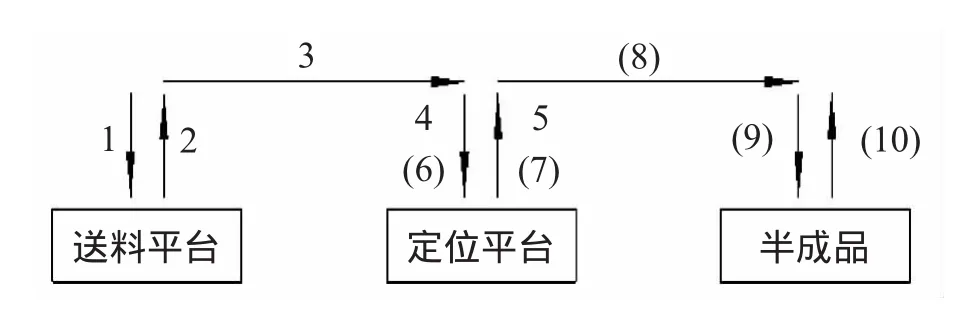
圖2 單一臂膜片取放流程
該方案可以高效率的完成整個(gè)工藝流程,但由于設(shè)備的空間設(shè)計(jì)較為緊湊,以及對(duì)成本的控制,對(duì)此方案進(jìn)行了新一輪的優(yōu)化,將兩個(gè)獨(dú)立運(yùn)行的手臂結(jié)合為一體控制,提出了雙臂機(jī)械手的新設(shè)計(jì)(如圖3)。此次優(yōu)化將成本降低為原先的一半,并將整個(gè)運(yùn)送時(shí)間縮短了1/2。
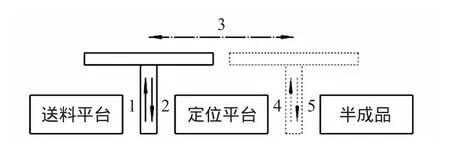
圖3 雙臂膜片取放流程
機(jī)械臂X向運(yùn)動(dòng)裝置(如圖4)由原先只帶動(dòng)一個(gè)機(jī)械臂轉(zhuǎn)為同時(shí)帶動(dòng)兩個(gè)機(jī)械臂,這對(duì)動(dòng)力裝置提出了更高的要求,為保證產(chǎn)品精度以及良品率,設(shè)計(jì)時(shí)采用了伺服電機(jī)控制高精度絲桿運(yùn)動(dòng)作為機(jī)械手臂運(yùn)行的主要方式,通過(guò)司服電機(jī)的帶動(dòng),最大運(yùn)行速度為800 mm/s,進(jìn)一步提高了生產(chǎn)效率。
伺服電機(jī)的最高使用轉(zhuǎn)速為:1 500 r/min
額定轉(zhuǎn)速為:3 000 r/min
摩擦扭矩為:T1=(Fa·Ph/2π·η)·A
式中:Fa——軸向負(fù)荷
Ph——滾珠絲杠的導(dǎo)程
η——滾珠絲杠的效率(0.9~0.95)
A——減速比
慣性力矩:每單位長(zhǎng)的絲桿軸慣性扭矩為1.23×10-3kg·cm2/mm,則絲桿軸全長(zhǎng)500 mm的慣性力矩為:

角加速度 ω'=(2π·Nm)/(60t1)
式中:Nm——電動(dòng)機(jī)每分鐘轉(zhuǎn)速
t1——加速時(shí)間
則扭矩為T(mén)K=T1+T2
故伺服電機(jī)瞬間最大扭矩必須大于TK。選擇電機(jī)滿足條件。
由于取放膜片的速度快,精度要求高,兩個(gè)手臂Y向運(yùn)動(dòng)時(shí)不能出現(xiàn)抖動(dòng),傾斜或動(dòng)作生硬的現(xiàn)象,故對(duì)手臂的Y向運(yùn)動(dòng)氣缸進(jìn)行受力分析,(如圖5)。負(fù)載安裝在氣缸的端板上,機(jī)械臂外伸,負(fù)載集中看作為向下的力F。
運(yùn)動(dòng)速度為:Va=300 mm/s,集中負(fù)載質(zhì)量為W=3.2 kg,外伸量為L(zhǎng)n=120 mm,故:集中負(fù)載質(zhì)量為:
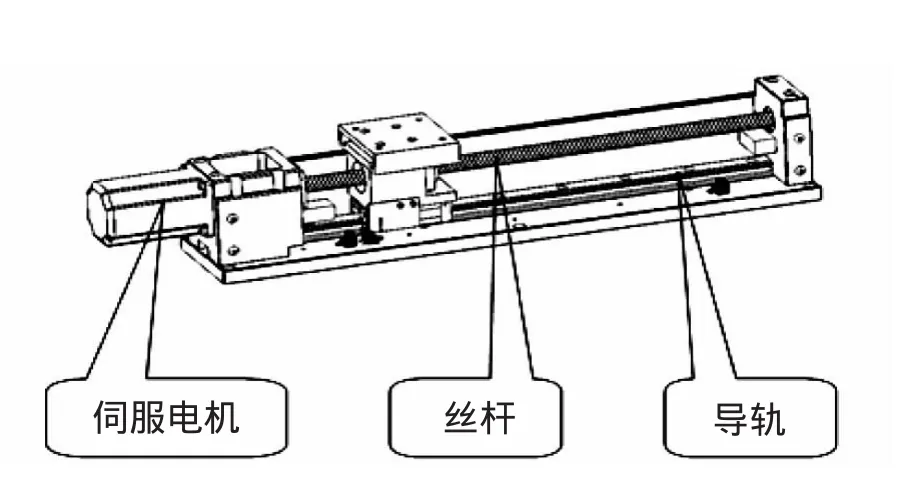
圖4 機(jī)械臂X向運(yùn)動(dòng)裝置
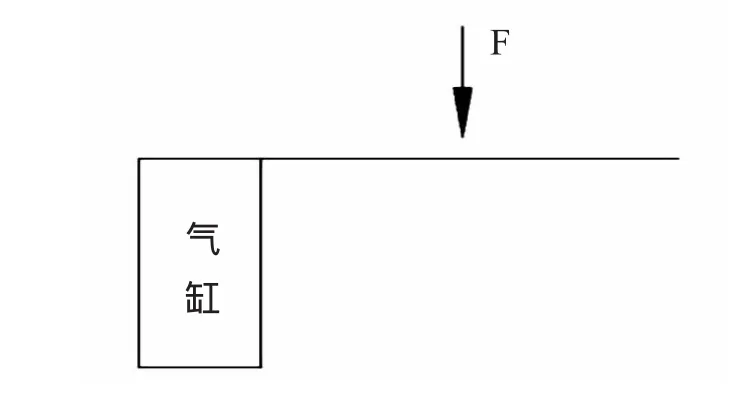
圖5 氣缸受力示意圖

式中:K——工件安裝系數(shù)
β——允許集中負(fù)載質(zhì)量系列
Wmax——最大允許集中負(fù)載質(zhì)量集中負(fù)載質(zhì)量的負(fù)載率為α1=W/Wa靜態(tài)力矩為:

式中:An——力矩中心位置距離修正值
靜態(tài)力矩的負(fù)載率為α2=M/Ma
動(dòng)態(tài)力矩為:

動(dòng)態(tài)力矩的負(fù)載率為α3=Me/Mea
計(jì)算得 αn=α1+α2+α3≤1,滿足使用要求。
3 結(jié) 論
本文主要介紹了背光源設(shè)備中機(jī)械手臂的設(shè)計(jì)過(guò)程,通過(guò)對(duì)產(chǎn)品工藝的深入研究,將影響設(shè)備生產(chǎn)效率的核心部件進(jìn)行整合設(shè)計(jì),將兩個(gè)機(jī)械手臂整合為一體控制,絲桿采用精密滾珠絲桿,導(dǎo)軌采用LM滾動(dòng)導(dǎo)軌。(如圖6)
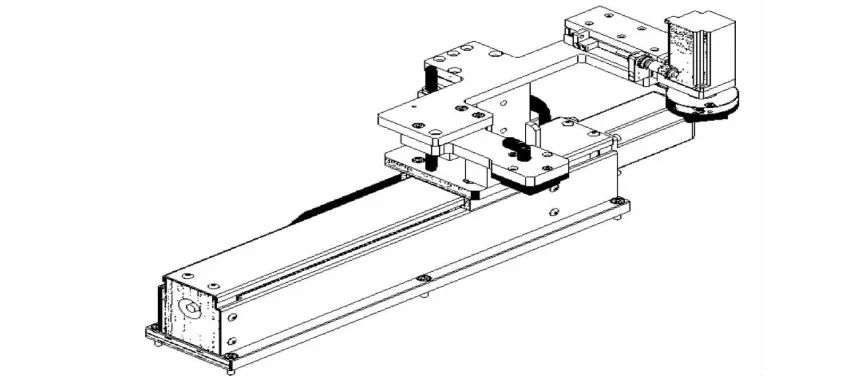
圖6 雙臂機(jī)械手
穩(wěn)定高精度的運(yùn)行使得產(chǎn)品定位精度高,減少機(jī)械手臂數(shù)量,降低了成本,并使得生產(chǎn)效率大大提高,滿足了客戶的需求。
:
[1]張俊清.背光源自動(dòng)帖片機(jī)送料機(jī)構(gòu)創(chuàng)新設(shè)計(jì)[J].現(xiàn)代顯示,2011(10):25-27.
[2]高艷.背光源膜片吸取裝置的設(shè)計(jì)[J].電子工業(yè)專(zhuān)用設(shè)備,2013(2-3):58-60.
[3]靳建鼎.電子專(zhuān)用設(shè)備的人性化設(shè)計(jì)[J].電子工藝技術(shù),2008,29(3):160-163.
Design of Double-Kinematics Robot in Backlight Equipment
WANG Chun
(Taiyuan Fenghua Information-equipment CO.,LTd.,Taiyuan 030024,China)
Abstract:Focusing on the design requirements of equipment about high precision,efficiency and running stability,we designed double-kinematics work pattern,by analyzing the production process.The result show this design successful reduces repeating actions,improves production efficiency.
Keywords:Backlight;kinematics Robot;efficiency
TH132
B
1004-4507(2013)10-0047-03
2013-09-23
王淳(1986-),女,山西太原人,大學(xué)本科,就職于太原風(fēng)華信息裝備股份有限公司,現(xiàn)從事電子專(zhuān)用設(shè)備的研制與開(kāi)發(fā),
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:42
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
小學(xué)生作文(低年級(jí)適用)(2018年3期)2018-04-17 00:58:35
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
少年博覽·小學(xué)低年級(jí)(2017年4期)2017-06-09 16:22:28
作文評(píng)點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫(huà)報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
少兒科學(xué)周刊·少年版(2015年4期)2015-07-07 20:56:37
時(shí)代英語(yǔ)·高二(2015年1期)2015-03-16 00:08:11