船用低壓斷路器動力系統(tǒng)優(yōu)化設計
2013-09-20 12:24:18紀寧毅
船舶標準化工程師 2013年6期
紀寧毅
(中國船級社質(zhì)量認證公司南京分公司,南京 210011)
0 引言
低壓斷路器常被作為低壓配電支路或終端的開關。然而在現(xiàn)代的船用低壓配電系統(tǒng)中,斷路器并不僅僅只是實現(xiàn)電路系統(tǒng)的通斷控制和簡單的過載、短路保護,而且還要保證提供隔離和安全保護功能。長期以來傳統(tǒng)低壓斷路器產(chǎn)品的設計開發(fā)憑借經(jīng)驗,通過反復的概念設計、詳細設計、樣機制造、樣機測試和試驗數(shù)據(jù)分析,直至產(chǎn)品定型生產(chǎn)。該過程是一個大循環(huán)過程,不僅難以提高產(chǎn)品質(zhì)量,而且耗費了大量的時間和資金。
虛擬樣機(Virtual Prototype)技術是一項新生的工程技術,它是計算機輔助工程(CAE)的一個重要分支。電器工程師在新產(chǎn)品概念研發(fā)階段,通過虛擬樣機技術,對產(chǎn)品進行虛擬性能測試,幫助設計者發(fā)現(xiàn)設計缺陷,并提出改進方案,以達到提高設計性能、降低設計成本、縮短產(chǎn)品研發(fā)周期的目的。
機械系統(tǒng)動力學仿真分析軟件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是美國MSC公司的虛擬樣機分析軟件。文章以某型號船用框架式斷路器為研究對象,應用ADAMS軟件建立系統(tǒng)仿真模型,對其進行運動特性仿真計算,獲得其分、合閘過程的動態(tài)特性。針對帶載合閘過程中存在的觸頭間易產(chǎn)生拉弧現(xiàn)象,對動力系統(tǒng)中各彈簧參數(shù)進行設計研究分析,獲得各參數(shù)對斷路器系統(tǒng)的影響靈敏度。針對各參數(shù)靈敏度高低不同,以動觸頭轉(zhuǎn)動角速度為最終優(yōu)化目標,完成該斷路器動力系統(tǒng)的優(yōu)化設計分析。該分析可用于指導產(chǎn)品的優(yōu)化和創(chuàng)新開發(fā),為產(chǎn)品進一步的優(yōu)化設計提供平臺。
1 斷路器操縱機構(gòu)模型建立
某型號船用低壓框架式斷路器機構(gòu)的動力學簡化模型如圖1所示。

圖1 斷路器機構(gòu)簡圖
該型號船用框架式斷路器機構(gòu)系統(tǒng)主要由動力機構(gòu)、操縱機構(gòu)和觸頭機構(gòu)組成。動力機構(gòu)主要由儲能彈簧(3根)、分閘彈簧、復位彈簧、儲能杠桿、儲能杠桿限位桿及其附屬部件組成,動力機構(gòu)部分構(gòu)件在圖1中未標出。斷路器的工作過程主要包括分閘和合閘兩個過程。在合閘過程中,動力機構(gòu)驅(qū)動桿AB完成合閘運動,該過程是一個四連桿機構(gòu)系統(tǒng),由圖1中的AB-BC-CO4-O4A組成。分閘過程是一個五連桿機構(gòu)系統(tǒng),由圖1中的HO1A-AB-BC-CO4-O4A組成。無論是合閘還是分閘過程,觸頭機構(gòu)都是一個四連桿機構(gòu)系統(tǒng),由圖1中的O4D-DE-EO3-O3O4組成。
斷路器系統(tǒng)分、合閘過程包含高速的碰撞,涉及因素較多,是一個接近瞬間的動作過程,因此要精確建模。針對該型號的框架式斷路器系統(tǒng)的復雜機構(gòu),采用三維造型軟件UG完成幾何模型的建模,利用ADAMS集成的專用接口模塊ADAMS/Exchange建立在ADAMS/View環(huán)境下的機構(gòu)動力學模型。為了仿真需要建模過程中簡化了模型某些工況,不考慮構(gòu)件鏈接之間的間隙和系統(tǒng)的一些輔助機構(gòu)。從程序的求解原理來看,只要仿真軟件中構(gòu)件幾何形體的質(zhì)量、質(zhì)心位置、慣性矩和慣性積與實際構(gòu)件相同,則仿真結(jié)果是等價的。在完成了對系統(tǒng)模型的簡化、捆綁合并以及添加正確的約束、負載和碰撞邊界條件后,利用ADAMS 軟件建立的該低壓框架式斷路器動力學模型如圖2所示。
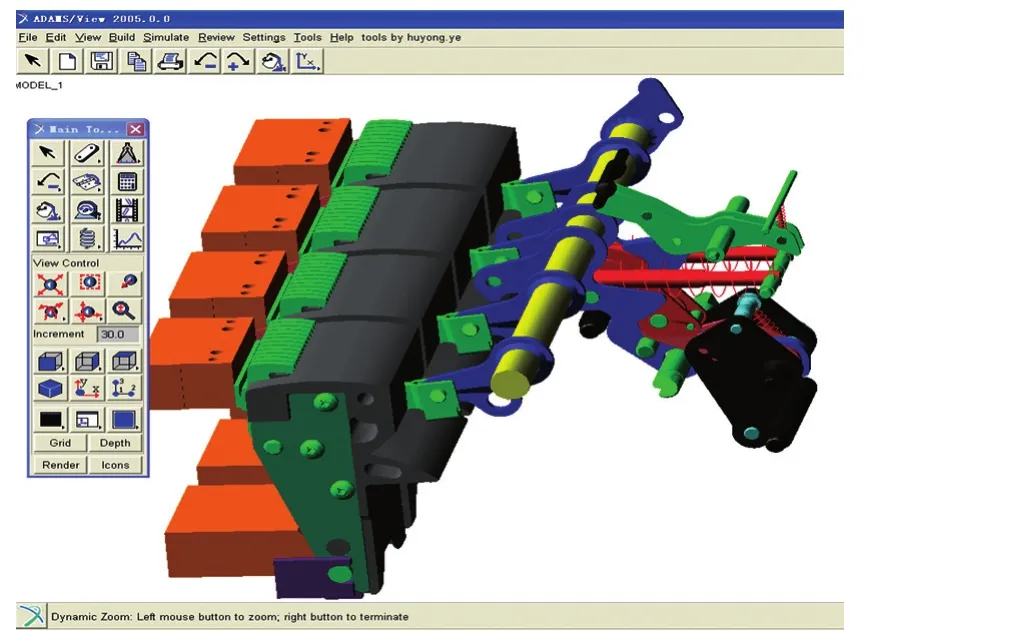
圖2 斷路器動力學模型
2 運動特性仿真分析
根據(jù)該型號船用斷路器實際模型及工況條件,把仿真分析分為合閘和分閘兩個過程。分、合閘過程仿真分析的結(jié)果包含了組成機構(gòu)系統(tǒng)的所有構(gòu)件的運動特性參數(shù)。利用ADAMS/Postprocessor后處理模塊可以精確輸出并繪制各分析數(shù)據(jù)曲線。
合閘過程中動觸頭運動特性仿真分析輸出曲線如圖3所示。
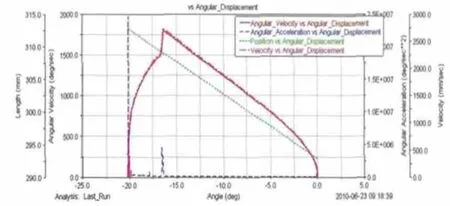
圖3 合閘過程動觸頭動態(tài)仿真分析輸出曲線圖
由圖3中的動觸頭開距隨角位移變化曲線(Position vs. Angular Displacement)可知,動觸頭仿真開距距離為34.372mm,與試驗開距距離的34.45mm相差0.078mm。這是由于系統(tǒng)構(gòu)件被定義成剛性,同時工況設置不精確以及機構(gòu)簡化也導致仿真不夠準確。動觸頭系統(tǒng)的最大線速度為2.274m/s,動靜觸頭碰撞后,動觸頭系統(tǒng)的速度由2.274m/s變?yōu)?.266m/s。
從動觸頭角速度隨角位移變化曲線(Angular Velocity vs. Angular Displacement)可知,仿真模型動觸頭系統(tǒng)轉(zhuǎn)角20.1692deg,動觸頭系統(tǒng)的最大速度為1.798deg/ms,當動觸頭系統(tǒng)繞其旋轉(zhuǎn)軸轉(zhuǎn)過16.3791deg時動靜觸頭碰撞。碰撞前后,動觸頭系統(tǒng)的速度由1.798deg/ms變?yōu)?.513deg/ms。從動觸頭角加速度曲線(Angular Acceleration vs. Angular Displacement)可知,動觸頭系統(tǒng)角加速度曲線上峰值出現(xiàn)時刻分別是:1)轉(zhuǎn)角δ=16.5331deg,動觸頭開始碰撞時刻;2)轉(zhuǎn)角δ=20.043deg,驅(qū)動桿AB與連桿HO1A上限位軸碰撞時刻;3)δ=20.1321deg,連桿HO1A與脫扣杠桿上滾珠軸承碰撞。
這條信息讓徐藝猶豫了一下,他還是把沙子里面的五十萬拿出來,飛快下樓,但他的腳步聲驚動了剛剛往樓上爬的兩個黑衣人,他們對視一下,以為是左達,返身向樓下追去。
從上述仿真分析中驗證了該型號船用框架式斷路器滿足設計要求,機構(gòu)系統(tǒng)的運行規(guī)律也是正確的,進而為該斷路器動力系統(tǒng)的優(yōu)化分析提供了支持。
3 動力系統(tǒng)優(yōu)化設計
在以多體動力學為理論基礎的機械產(chǎn)品虛擬樣機開發(fā)專用軟件ADAMS中,剛體的運動狀態(tài)是根據(jù)構(gòu)件質(zhì)心在計算坐標系的位置,采用修正的Newton—Raphson迭代算法進行分析求解。雖然不同型號的低壓斷路器操作機構(gòu)原理相同,但提供動力來源的動力系統(tǒng)卻有很大不同[9]。為了縮短動靜觸頭運動過程中的燃弧時間,保證動靜觸頭一經(jīng)關合就可靠接觸,否則在帶載工作情況下觸頭反復回彈跳動將會持續(xù)產(chǎn)生拉弧,觸頭溫度急劇上升,使觸頭發(fā)生嚴重的動熔焊,降低斷路器使用壽命。
文章針對帶載合閘過程中存在的觸頭間易產(chǎn)生拉弧問題,對動力系統(tǒng)中各彈簧參數(shù)分別進行設計研究分析,獲得各參數(shù)對斷路器系統(tǒng)的影響靈敏度。針對各參數(shù)靈敏度高低不同,以動觸頭轉(zhuǎn)動角速度最大為最終優(yōu)化目標,完成該船用斷路器動力系統(tǒng)的優(yōu)化設計分析。在符合斷路器系統(tǒng)運動規(guī)律的前提下,根據(jù)分析計算數(shù)據(jù)獲得各彈簧技術參數(shù)的最優(yōu)。
3.1 設計研究分析
設計研究過程中,設計變量按一定的規(guī)則在一定的范圍內(nèi)進行取值。根據(jù)設計參數(shù)在一定范圍內(nèi)的若干取值,自動進行一系列仿真分析。每次取不同的設計參數(shù)值,完成設計研究分析后,系統(tǒng)即輸出各次分析結(jié)果,并研究設計參數(shù)對機構(gòu)系統(tǒng)的影響。通過各次分析結(jié)果的對比分析,得到設計變量對樣機性能的影響、設計變量的最佳取值以及設計變量的靈敏度。
靈敏度即是樣機性能對設計變量值變化的靈敏程度。前后兩次迭代運算目標函數(shù)增量與設計變量增量比值的平均值,既是該設計變量此次迭代運算的靈敏度。靈敏度的數(shù)學表達式為:
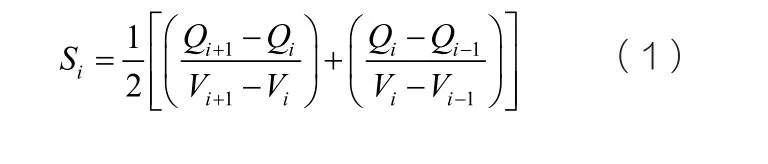
式(1)中:Q為目標函數(shù)值;V為設計變量值;i為迭代次數(shù)。
靈敏度為正值,表示目標函數(shù)在迭代運算過程中逐漸增大;靈敏度為負值,則目標函數(shù)值在迭代過程中逐漸減小。目標函數(shù)值變化愈大,則靈敏度的絕對值愈大。靈敏度愈高,表明該設計變量與目標函數(shù)的相關性愈高,對系統(tǒng)的影響愈明顯。通過對比設計變量的靈敏度數(shù)值大小就可獲知選定的設計變量對目標函數(shù)的影響程度。
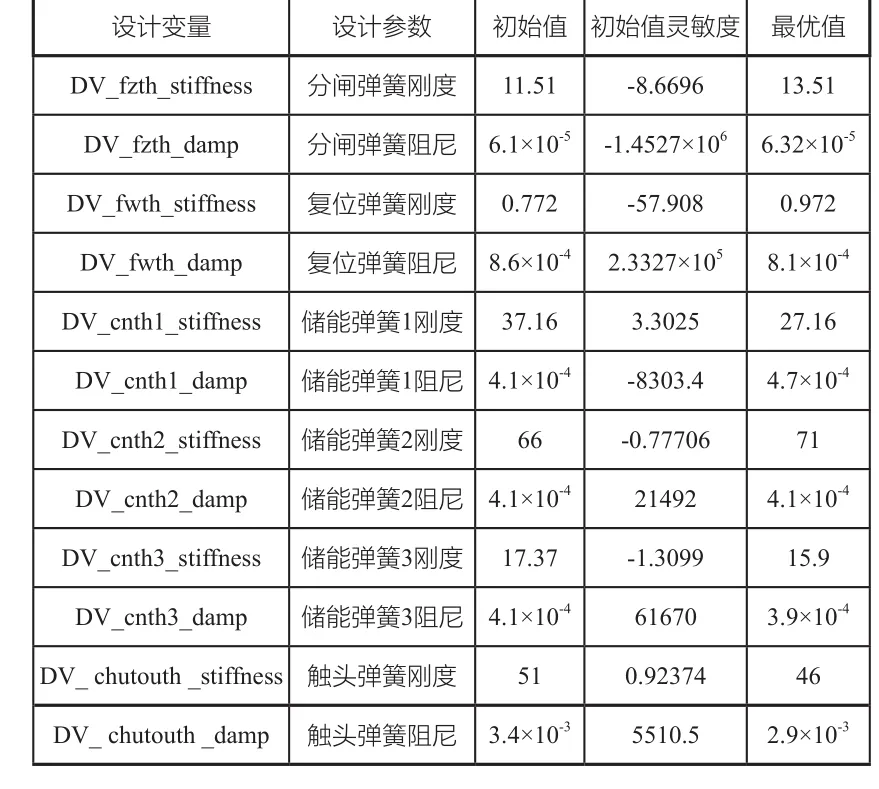
表1 設計研究分析結(jié)果
表1的設計研究分析結(jié)果可知:在上述12個設計變量的中,設計變量“DV_fzth_damp”、“DV_fwth_damp”、“DV_cnth1_damp”、“DV_cnth2_damp”、“DV_cnth3_damp” 和“DV_ chutouth _damp” 的初始值靈敏度最高,即“分閘彈簧阻尼”、“復位彈簧阻尼”、“儲能彈簧1阻尼”、“儲能彈簧2阻尼”、“儲能彈簧3阻尼”、“觸頭彈簧阻尼”的變化對機構(gòu)系統(tǒng)的合閘運動過程中的動觸頭平均角速度影響最大,即是對系統(tǒng)的合閘時間影響最大。
3.2 優(yōu)化設計分析
優(yōu)化設計分析是ADAMS/View提供的一種復雜的高級分析工具。在滿足各種設計條件和在指定的變量變化范圍內(nèi),通過程序自動選擇設計變量,由分析求取目標函數(shù)的最優(yōu)值。
通過對影響系統(tǒng)動作靈敏度最高的6個設計變量進行優(yōu)化設計分析,獲得該型號船用斷路器系統(tǒng)動觸頭的最大平均角速度。以達到在滿足機構(gòu)功能的前提下合閘時間最短,減短觸頭間燃弧時間,提高產(chǎn)品質(zhì)量和工作性能。在優(yōu)化設計過程中,根據(jù)設計研究分析的最優(yōu)值結(jié)果,合理設定設計變量的變化范圍,施加一定的限制以保證最優(yōu)化設計處于合理的取值范圍。程序自動調(diào)整設計變量,獲得目標函數(shù)的最優(yōu)值以及設計變量最優(yōu)解組合。考慮上述6個以彈簧技術參數(shù)為設計變量的參數(shù)化優(yōu)化設計結(jié)果如表2所示(平均角速度單位:deg/sec;阻尼單位:Newton-sec/mm)。
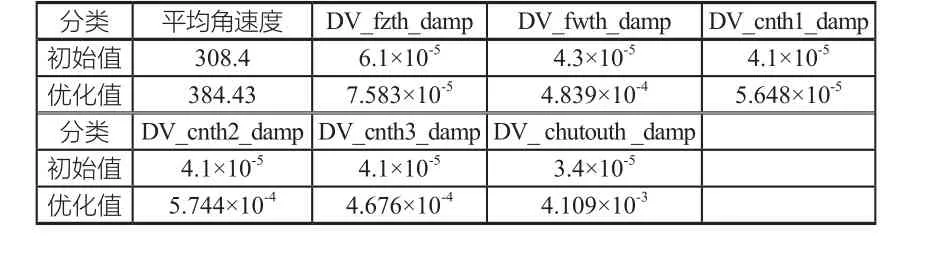
表2 優(yōu)化設計結(jié)果
由表2可知,在同時考慮對斷路器系統(tǒng)運動特性影響最大的6個設計變量情況下,完成系統(tǒng)的優(yōu)化迭代運算分析。經(jīng)過優(yōu)化設計不僅獲得設計變量的最優(yōu)解組合,而且可以整體優(yōu)化目標函數(shù),最終實現(xiàn)了把動觸頭的平均角速度從原來的308.4deg/sec提升到384.43deg/sec,合閘工作時間縮短了25%,減短合閘過程中動靜觸頭間燃弧時間,經(jīng)過優(yōu)化后程序自動生成新的樣機模型。以上分析結(jié)果可以為該型號船用低壓框架式斷路器以后的生產(chǎn)設計改進提供技術參考。
4 結(jié)論
1)通過機械系統(tǒng)動態(tài)仿真技術研究某型號船用低壓框架式斷路器系統(tǒng)的方法,突破了傳統(tǒng)制造物理樣機的瓶頸。建立動力學仿真模型,驗證了模型的正確性并獲得了系統(tǒng)機械運動特性。
2)為了縮短合閘過程動靜觸頭間燃弧時間,以動觸頭轉(zhuǎn)動平均角速度為優(yōu)化目標函數(shù),完成了斷路器動力系統(tǒng)的動態(tài)設計研究和優(yōu)化分析,通過優(yōu)化把該斷路器動觸頭的合閘平均角速度從308.4deg/sec提升到384.43deg/sec,縮短了合閘時間,進而提高產(chǎn)品的安全性、可靠性和使用壽命。
3)本論文為以后該產(chǎn)品的強度、剛度以及疲勞分析研究提供了技術支持,優(yōu)化后生成的樣機模型為以后該產(chǎn)品的改進設計提供參考,同時也為虛擬樣機技術在電器產(chǎn)品研發(fā)中的應用提供了一種可行有效的方法與經(jīng)驗。
[1]Ren Wanbin, Chen Yinghua, Zhai Guofu. Modeling and simulation of hermetically sealed electromagnetic relay under mechanical environment[J]. ICEC2006, 2007,E90-C(7):1448-1454.
[2]Edgar Dullni. A vacuum circuit breaker with permanent magnetic actuator for frequent operations[C]. IEEE 18th Int.Symp.on Discharges and Electrical Insulation in Vacuum, 1998:688-691.
[3]張敬菽, 陳德貴, 劉洪武, 等. 基于虛擬樣機技術的低壓塑殼斷路器仿真研究[J]. 系統(tǒng)仿真學報,2004,16(9):2118-2121.
[4]A.Lakshmikanth, Medhat M.Morcos. A power quality monitoring system:a case study in DSP-based solutions for power electronics[J]. IEEE Transactions on Instrumentation and Measurement, 2001, 50(3):724-731.
[5]吳冬青, 唐文獻, 李莉敏. 虛擬樣機技術在斷路器開發(fā)中的應用研究[J]. 機電一體化, 2003,(4):22-25.
[6]陳德桂. 虛擬樣機成為開發(fā)新型低壓電器的關鍵技術[J]. 低壓電器, 2002,(6):3-7.
[7]李增剛. ADAMS入門詳解與實例[M]. 北京:國防工業(yè)出版社, 2008,91-93.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45