高速列車運動仿真可視化建模研究
2013-09-25 02:58:08呂希奎周小平賈曉秋
圖學(xué)學(xué)報 2013年1期
呂希奎, 周小平, 賈曉秋
(1. 石家莊鐵道大學(xué)交通運輸學(xué)院,河北 石家莊 050043 2. 交通安全與控制河北省重點實驗室,河北 石家莊 050043)
高速列車運動仿真可視化建模研究
呂希奎1,2, 周小平1, 賈曉秋1
(1. 石家莊鐵道大學(xué)交通運輸學(xué)院,河北 石家莊 050043 2. 交通安全與控制河北省重點實驗室,河北 石家莊 050043)
以CRH系列高速列車為研究對象,建立了基于變參數(shù)的列車三維動態(tài)仿真模型,實現(xiàn)了多種列車單元模型在運動過程中的實時調(diào)入和裝配,滿足了高速列車運動仿真多樣性的要求。采用Visual C++ 6.0、OpenGL三維圖形庫和Oracle數(shù)據(jù)庫開發(fā)完成高速列車運動仿真系統(tǒng),實現(xiàn)高速列車運動仿真可視化建模以及與線路設(shè)計之間的有效集成。通過實際應(yīng)用,取得了較好的仿真效果。
高速列車;三維建模;運動仿真;仿真系統(tǒng);三維可視化
將虛擬仿真技術(shù)和高速列車運動結(jié)合起來進(jìn)行研究,在計算機(jī)上重建線路設(shè)計方案,再現(xiàn)一個真實的鐵路運行環(huán)境,對評價和優(yōu)化線路設(shè)計結(jié)果、高速列車運行的安全性和可靠性、旅客舒適度以及列車運行控制策略等具有重要意義。對此,國內(nèi)外很多專家學(xué)者進(jìn)行了相關(guān)的研究,就高速列車運動仿真可視化建模而言,國內(nèi)主要有:黃友能、唐濤、牛清華等采用MultiGen Creator三維建模軟件構(gòu)建三維視景模型,采用 Vega視景仿真軟件進(jìn)行視景驅(qū)動實現(xiàn)了城軌列車虛擬駕駛仿真[1-2]。劉敏賢和王家素采用 3DMAX構(gòu)建了視景仿真的三維場景,根據(jù)高溫超導(dǎo)磁懸浮車及其在軌道上的運行情況和運行特點,模擬了高溫超導(dǎo)磁懸浮車的運動仿真[3]。劉博、徐元銘和史紅偉對基于 Creator的列車運行三維建模技術(shù)進(jìn)行了詳細(xì)研究,并用 Creator軟件建立了簡化的列車、線路及環(huán)境模型,但沒有對列車運動仿真進(jìn)行研究[4]。姜璐和寧濱以 Creator建立線路虛擬場景,以 Vega為軟件設(shè)計平臺,建立了列車駕駛室仿真模型,應(yīng)用在列車三維駕駛仿真中,而不是整列高速列車模型和運動仿真[5]。翟婉明實現(xiàn)了基于軌道動力學(xué)應(yīng)用的單節(jié)車輛運動仿真,但也不是一列完整的列車,其線路場景也是較短的虛擬的一段線路三維場景,并不是實際的線路設(shè)計方案實景[6-7]。在國外,都靈理工大學(xué)的 Caneparo L研究了都靈伯塔蘇薩高速列車車站的虛擬現(xiàn)實設(shè)計與管理[8];韓國鐵道研究院的Jun和Hyun-Kyu研究了在一個交互式虛擬環(huán)境下的多列車運行模擬[9];俄亥俄大學(xué)的Kljuno、Elvedin、Williams II等研究了以控制和虛擬現(xiàn)實為基礎(chǔ)的車輛仿真系統(tǒng),實現(xiàn)了車輛的動態(tài)模擬[10];羅馬大學(xué)的Bruner M和Rizzetto L對列車在鐵路軌道動態(tài)模擬進(jìn)行了深入研究[11]。
綜合目前國內(nèi)外研究現(xiàn)狀,主要集中于采用視景仿真軟件和三維建模軟件,模擬較短的線路進(jìn)行列車的運動仿真,與實際的線路有著較大的區(qū)別,所建的列車模型也主要是單節(jié)車輛模型,仿真控制比較簡單。缺少基于線路設(shè)計與高速列車運動可視化仿真建模的研究。基于三維線路設(shè)計應(yīng)用的高速列車運動仿真可視化建模的難點在于:
1) 整車模型數(shù)據(jù)量大,不再是單節(jié)列車模型,運動過程中要求實時加載和裝配模型,對運動仿真計算算法有較高的要求,在保證加載和裝配實時性前提下,必須還具備較高的運動仿真速度;
2) 列車各組成單元模型之間的約束關(guān)系以及與線路約關(guān)系復(fù)雜,既有整列車的運動與三維線路之間的約束關(guān)系,又有各列車各單元之間的約束關(guān)系,實時運動過程中坐標(biāo)計算、控制更復(fù)雜。
本文將重點解決上述兩個難點問題,實現(xiàn)基于三維線路設(shè)計的高速列車運動仿真三維可視化建模。
1 三維視景模型的分析和建立
1.1 列車模型的建模流程
系統(tǒng)中的高速列車選取CRH系列動車組,列車運動在具體的線路上,而線路是由直線和曲線組成,這種特性決定了無法預(yù)先建立一列完整的高速列車模型,因為在曲線部分,由于整列車模型具有一定長度,在曲線段列車部分模型有可能位于線路外,這將導(dǎo)致運動仿真不真實,示意圖如圖1所示。
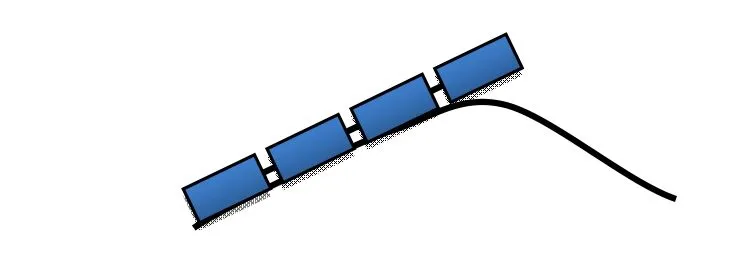
圖1 整車一體模型部分位于線路外示意圖
為了能更有效、更逼真的進(jìn)行列車運動仿真,根據(jù)動車組特點和單元模型化的概念,采用單元建模的方法解決該問題,即將整列列車模型拆分成多個單元模型,在運動過程中再實時對各單元模型進(jìn)行組裝成整列列車模型,而運動控制則由各單元模型獨立控制自己的運動。為簡化說明,以2M2T編組為例,建立高速列車仿真模型(兩輛頭車和兩輛中間車組成),如圖2所示。
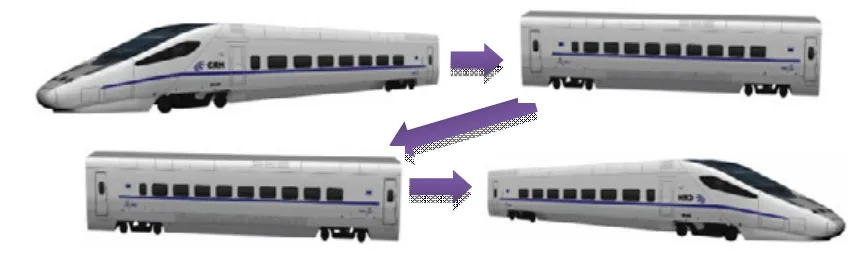
圖2 仿真系統(tǒng)車輛單元模型組成
按照圖2系統(tǒng)模型的單元組成方式,列車整體模型如圖3所示。

圖3 列車整體運動模型
高速列車模型的多樣化和任意編組,可以有多個不同列車模型,如2M2T、4M4T、6M2T等。通過編組設(shè)置,能夠根據(jù)需求,進(jìn)行多種列車模型的運動仿真,如圖4所示。

圖4 列車模型編組設(shè)置
1.2 列車幾何模型
根據(jù)系統(tǒng)的模型組成(以 2M2T為例),采用面向?qū)ο蠓椒ǎ熊嚹P腿S場景構(gòu)成為:
高速列車模型場景={頭車 1,中間車輛 1,中間車輛2,頭車2,ID號,名稱,紋理,材質(zhì),顏色,光照…}
由于列車三維運動仿真系統(tǒng)是一個多變量、多自由度的系統(tǒng)[7],尤其是三維線路場景的運動仿真中,系統(tǒng)的復(fù)雜性大大加強(qiáng),需要將模型進(jìn)行簡化。系統(tǒng)幾何模型歸結(jié)為以下對象的相互作用:
1) 動車車體對象:車體,轉(zhuǎn)向架,輪對組成為動車車輛剛體對象。
2) 線路整體對象:離散的鋼軌、軌枕、道床、路基等統(tǒng)一簡化為一個線路剛體對象。
動車剛體以輪對和路基對象中的鋼軌之間以3個空間方向規(guī)定了各對象之間的空間約束關(guān)系。在三維場景中與線路模型對象組成如圖5所示。
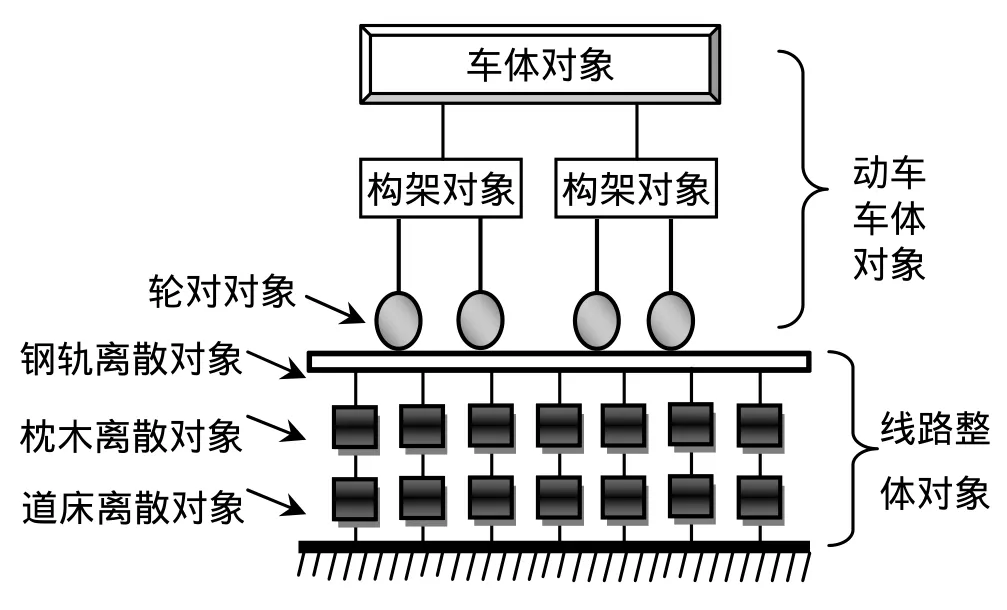
圖5 系統(tǒng)模型結(jié)構(gòu)
1.3 運動系統(tǒng)坐標(biāo)系的建立
列車的運動由車輛的各構(gòu)件運動組成,其中剛性構(gòu)件包括:車體、輪對等。每一個可移動的剛性構(gòu)件有6個規(guī)定的自由度,即X、Y、Z方向的位移和繞X、Y、Z方向的旋轉(zhuǎn)角。整個仿真場景有一個全局坐標(biāo)系,定義在車體質(zhì)心垂直于軌面的交點處,每一個組件有一個局部坐標(biāo)系,位置隨車在線路上變化而變化。在列車運動仿真系統(tǒng)中,需要實現(xiàn)實時互動。如列車運行時輪對的轉(zhuǎn)動、轉(zhuǎn)向架的運動情況等,這些都需要由 DOF技術(shù)來實現(xiàn)。它通過定義坐標(biāo)系和設(shè)定運動屬性,使模型對象具有各自運動的能力,可以控制它的所有子節(jié)點,按照所設(shè)置的自由度范圍運動。以中間車輛為例,其系統(tǒng)運動坐標(biāo)系的構(gòu)成如圖6所示。每個局部坐標(biāo)系相對位置的變化,嚴(yán)格參照主坐標(biāo)系的變化而變化。
1.4 列車三維線路場景
要實現(xiàn)列車運動的視景仿真,建立逼真的列車運行環(huán)境是必不可少的,它不僅包括了鐵路信號、鐵軌、軌枕、接觸網(wǎng)等基礎(chǔ)設(shè)施,及機(jī)車、車輛等信息,還包括了周邊的地理環(huán)境信息共同構(gòu)成了列車運動仿真的基礎(chǔ)。本文是在已有的三維線路設(shè)計系統(tǒng)基礎(chǔ)上進(jìn)行研究,系統(tǒng)根據(jù)設(shè)計方案為列車運動仿真構(gòu)建了三維線路場景,這為列車運動仿真提供了線路條件和基礎(chǔ),如圖7所示。
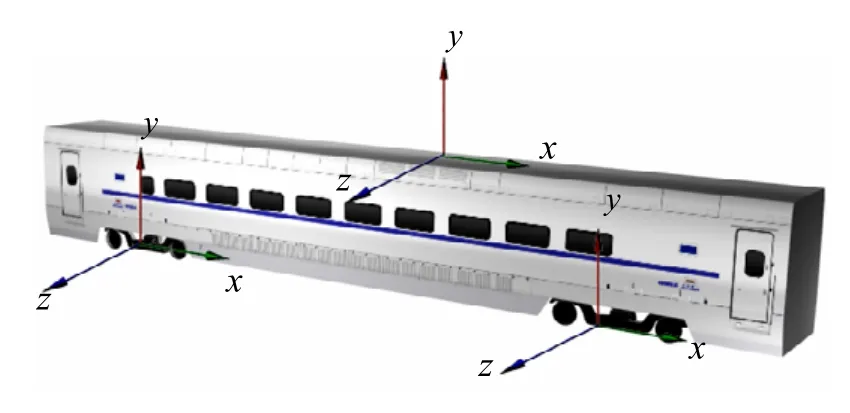
圖6 運動系統(tǒng)性坐標(biāo)系
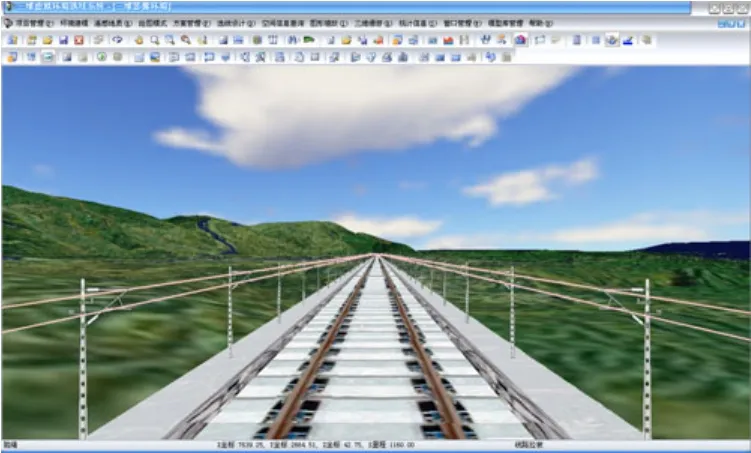
圖7 軌道三維幾何模型
2 列車運動仿真實時處理算法
在列車運動過程中,必須解決列車運動過程中在線路空間位置的確定。針對列車運動是離散計算問題,采用如下算法:以線路作為軌跡函數(shù),求出線路與車輛在不同位置的運動系列,然后計算列車單元模型各構(gòu)件疊加在不同行駛位置的運動上,構(gòu)成整個列車系統(tǒng)的運動。
其流程如下:
根據(jù)當(dāng)前運動的里程s,從線路設(shè)計數(shù)據(jù)庫中讀取設(shè)計方案的線路三維坐標(biāo)數(shù)據(jù),計算當(dāng)前里程s位于的線路的哪兩個斷面內(nèi)。
確定好所處兩個斷面后,根據(jù)兩個斷面三維坐標(biāo)插值出單元模型的當(dāng)前在線路上的空間坐標(biāo)。
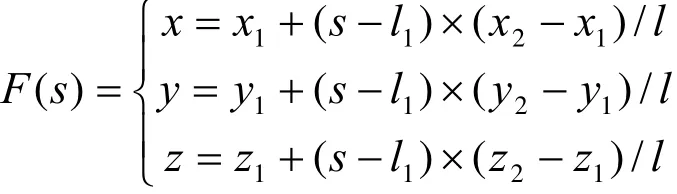
其中 ),,(111zyx和 ),,(222zyx是軌道相臨斷面中心點三維坐標(biāo),斷面處里程分別為l1和l2,兩斷面里程間距為12lll-= 。
將機(jī)車車輛定義為在線路上行駛的連續(xù)運動對象,而線路作為連續(xù)運動的路徑函數(shù),線路函數(shù)定義為
因此,在渲染某一幀圖形時,首先要在線路上搜索,頭車及構(gòu)件模型在當(dāng)前行程在軌道某相鄰關(guān)鍵節(jié)點之間,獲得當(dāng)前幀圖像的實際運動位置點。這種插值可以描述為圖8所示[7]。然后再將列車其它單元模型疊加在不同行駛位置上(直線段平移;線路曲線段平移+旋轉(zhuǎn)),構(gòu)成整個耦合系統(tǒng)的運動。
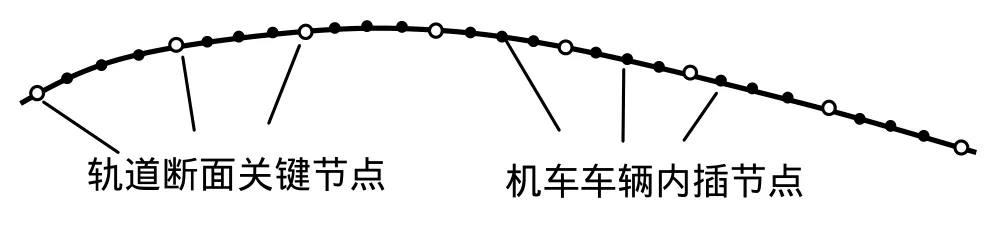
圖8 運動軌跡的位置插值
算法具體描述如圖9所示。
通過圖9所示的算法,就可以實現(xiàn)每個列車車輛單元模型及其組成的構(gòu)件在某一時刻的行程數(shù)據(jù),與其在三維運動模型系統(tǒng)中所處的位置相匹配,同時每個車輛單元模型也與其它車輛單元模型相匹配。經(jīng)過這種處理,將當(dāng)前行駛位置車輛單元模型及其各構(gòu)件與當(dāng)前行駛位移量疊加起來,就得到了動車組整體模型在線路上的運動仿真。
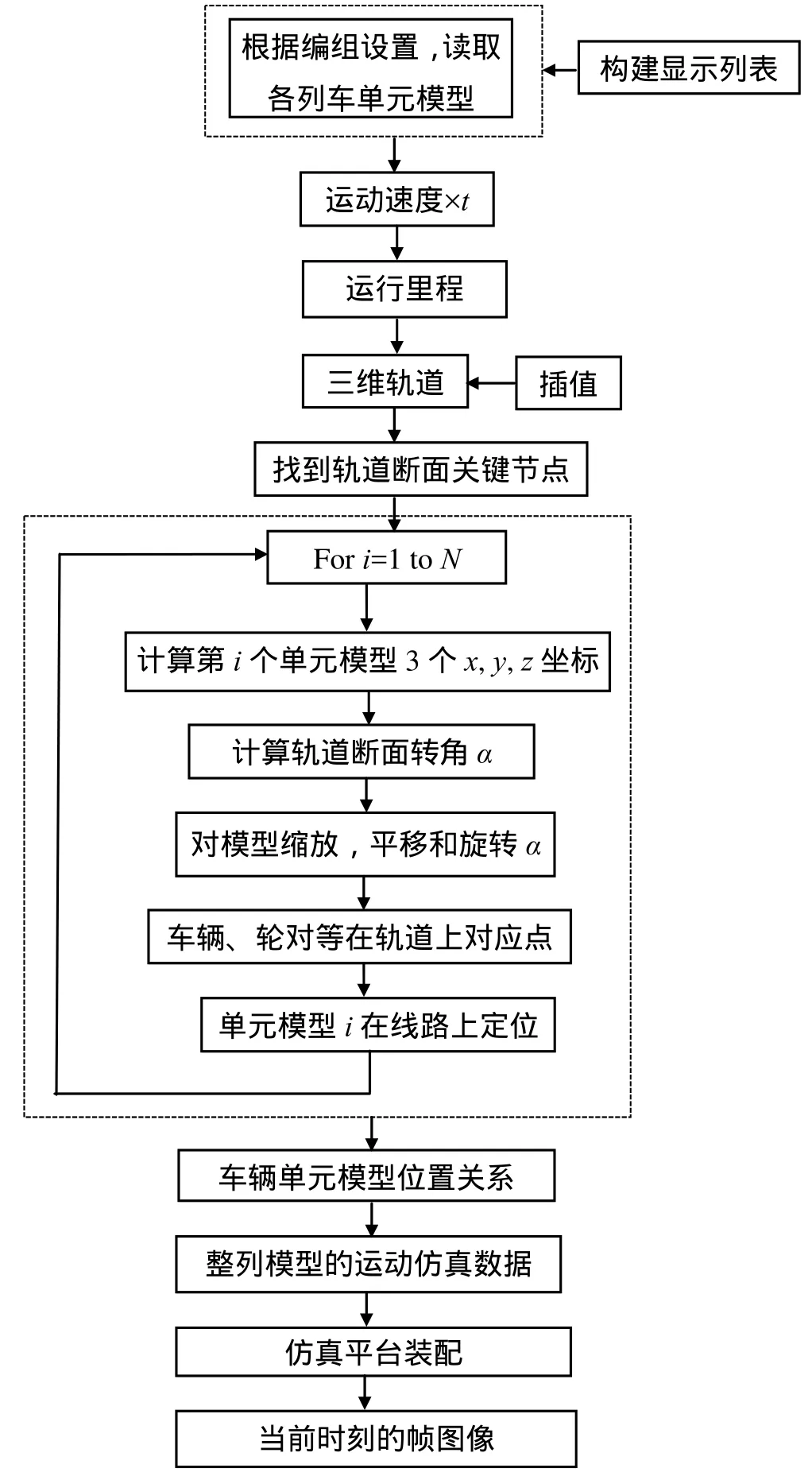
圖9 算法流程圖
3 高速列車運動仿真實現(xiàn)
3.1 列車單元模型建模方法
建立三維模型的軟件有多種,如AutoCAD,3Dmax,Maya等。其中3D Max是Autodesk公司開發(fā)的基于PC系統(tǒng)的三維動畫渲染和制作軟件,廣泛應(yīng)用于工業(yè)設(shè)計、建筑設(shè)計、工程可視化等領(lǐng)域。具有建模功能強(qiáng)大、擴(kuò)展性好、操作簡單等特點。本文采用3D Max建立動車組三維單元模型。模型最終效果如圖10所示。
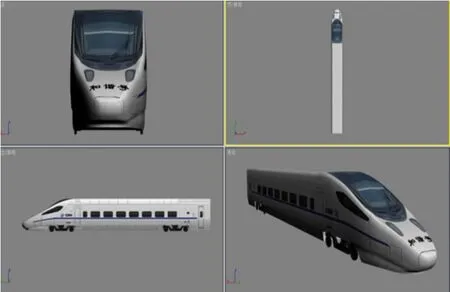
圖10 模型最終效果圖
3.2 系統(tǒng)實現(xiàn)
系統(tǒng)采用Visual C++編程語言、OpenGL三維圖形庫和 Oracle數(shù)據(jù)庫開發(fā)完成高速列車運動仿真系統(tǒng)。系統(tǒng)是在已有的鐵路線路三維系統(tǒng)基礎(chǔ)之上的子系統(tǒng),實現(xiàn)過程如下:
1) 首先在線路三維系統(tǒng)中進(jìn)行線路設(shè)計,然后建立三維線路模型,運行主界面如圖 11所示。
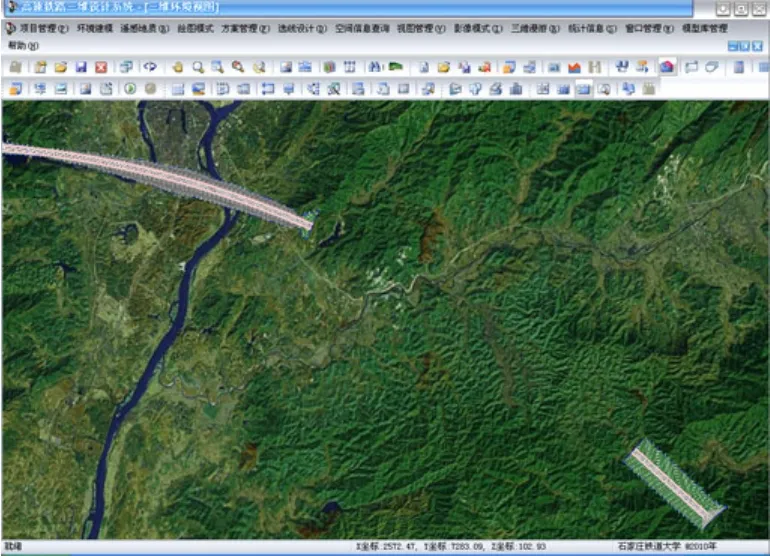
圖11 系統(tǒng)運行主界面
2) 按照圖4列車模型編組設(shè)置,選擇CRH系列動車進(jìn)行編組,從模型數(shù)據(jù)庫調(diào)入模型,經(jīng)過模型解釋和裝配以及基于線路函數(shù)的動畫關(guān)鍵幀生成,可以得到合理簡化的列車、線路及環(huán)境模型,實現(xiàn)了逼真的鐵路運行環(huán)境。系統(tǒng)以一種有序的方式集成在綜合仿真平臺下,形成了車輛—線路運動仿真環(huán)境。根據(jù)不同的動車車輛和線路參數(shù)建立多種高速列車模型。圖 12、圖 13為不同類型動車組的運動仿真結(jié)果。
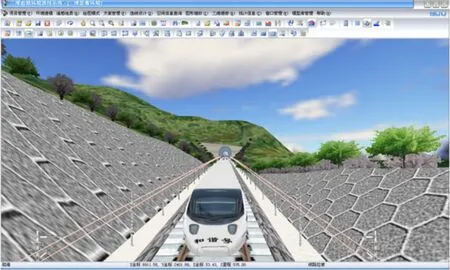
圖12 CRH5動車組運動仿真結(jié)果
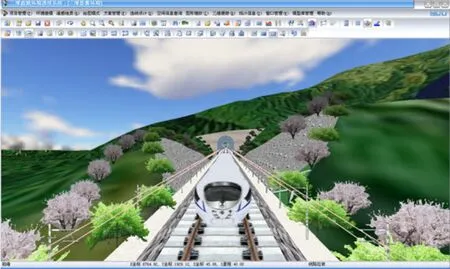
圖13 CRH3動車組運動仿真結(jié)果
在運動仿真過程中,動車單元模型組裝和空間約束正確,完好的建立了整列列車模型,整個系統(tǒng)能夠以每秒30~45幀運行,完全滿足實時運動仿真的要求。
4 結(jié) 論
在面向?qū)ο蟮慕7椒ɑA(chǔ)上,通過引入三維建模和模型可視化技術(shù),對列車運動仿真系統(tǒng)中的列車可視化建模進(jìn)行了研究。分析了列車三維模型的層次和建模特點,給出了相關(guān)建模流程。通過模型和運動數(shù)據(jù)實時插值與匹配的圖像關(guān)鍵幀生成技術(shù),實現(xiàn)了列車三維模型與線路設(shè)計之間最終集成。建立了高速列車運動與三維線路設(shè)計綜合集成的仿真系統(tǒng)。通過實際建模和應(yīng)用,取得了滿意的仿真效果,滿足視景仿真的實時驅(qū)動要求 。
[1] 黃友能, 唐 濤, 宋曉偉. 虛擬仿真技術(shù)在地鐵列車運行仿真系統(tǒng)中的研究[J]. 系統(tǒng)仿真學(xué)報, 2008,20(12):3208-3211.
[2] 牛清華, 錢雪軍. 城軌列車虛擬駕駛仿真系統(tǒng)[J].機(jī)電一體化, 2009, (4):66-69.
[3] 劉敏賢, 王家素, 王素玉. 高溫超導(dǎo)磁懸浮列車視景仿真系統(tǒng)[J]. 超導(dǎo)技術(shù), 2011, 39(3):40-44.
[4]劉 博, 徐元銘, 史紅偉. 基于 Creator的列車運行三維建模技術(shù)研究[J]. 科學(xué)技術(shù)與工程, 2010,10(30):7545-7549.
[5] 姜 璐, 寧 濱. 列車三維駕駛仿真系統(tǒng)的設(shè)計與實現(xiàn)[J]. 鐵道通信信號, 2008, 44(9):37-40.
[6] 丁國富, 翟婉明, 張 治, 等. 機(jī)車車輛軌道耦合幾何結(jié)構(gòu)基于面向?qū)ο蟮慕7治鲅芯縖J]. 交通運輸工程學(xué)報, 2001, 1(2):14-17.
[7]丁國富, 翟婉明, 張 治, 等. 車輛-軌道耦合系統(tǒng)中基于變參數(shù)的三維圖形仿真研究[J]. 計算機(jī)輔助設(shè)計與圖形學(xué)學(xué)報, 2002, 14(2):115-119.
[8] Caneparo L. Shared virtual reality for design and management:the porta susa project [J]. Automation in Construction, January, 2001, 10(2):217-228.
[9] Jun H K. Multii-train operation simulation in an interactive virtual environment [J]. Journal of Information and Computational Science, 2007, 4(1):77-89.
[10]Kljuno E, Williams I I, Robert L. Vehicle simulation system:controls and virtual-reality-based dynamics simulation [J]. Journal of Intelligent and Robotic Systems:Theory and Applications, 2008, 52(1):79-99.
[11]Bruner M, Rizzetto L. Dynamic simulation of tram-train vehicles on railway track [J]. WIT Transactions on the Built Environment, Urban Transport XIV:Urban Transport and the Environment in the 21st Century, 2008, 101:491-501.
The motion simulation of high-speed train
Lü Xikui1,2, ZhouXiaoping1, Jia Xiaoqiu1
( 1. School of Traffic and Transportation of Shijiazhuang Tiedao University, Shijiazhuang Hebei 050043, China;2. Traffic Safeties and Control Lab of Hebei Province, Shijiazhuang Hebei 050043, China )
The three-dimensional dynamic simulation model based on varying parameters is established for the CRH high-speed train, and the real-time transfer and assembly of various train element models during the process of motion are achieved. A high-speed train movement simulation system is developed using Visual C++ 6.0, OpenGL 3D graphics library and the Oracle Database. A comprehensive integrated simulation system between High-speed train movement and three-dimensional line design is established. The experiments show that good simulation results are obtained.
high-speed train; three-dimensional modeling; motion simulation; simulation system; 3D visualization
U 29-39
A
2095-302X (2013)01-0087-05
2011-09-16;定稿日期:2011-12-15
國家自然科學(xué)基金資助項目(51278316)
呂希奎(1976-),男,遼寧綏中人,副教授,主要研究方向為工程信息技術(shù)與虛擬環(huán)境仿真技術(shù)、線路勘測設(shè)計現(xiàn)代技術(shù)。E-mail:Lvxikui@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
傳媒評論(2019年4期)2019-07-13 05:49:14