海洋管道單點提放的若干數學模型研究
2013-10-11 06:20:02曾霞光段夢蘭陳景皓
海洋工程 2013年1期
曾霞光,段夢蘭,陳景皓
(中國石油大學(北京)機械與儲運工程學院,北京 102249)
隨著中國深海油氣開發的進程,中國必須掌握深水管道鋪設和安裝的分析設計技術。深水海洋油氣開發中,主要的鋪管安裝方式有S型鋪設,J型鋪設等。鋪管和安裝作業中,回收和棄置管道操作非常普遍。在這些作業過程中,管道的軸力,彎矩,應力,應變等需要控制在一定的范圍內以保證管道完好,因此海洋管道鋪設和收棄作業方案,尤其是船舶位置移動設計和纜繩的收放速度非常重要。為了進行設計分析,需要建立海洋管道的收棄作業過程分析模型和方法。
鋪管作業可以看作棄管作業的前期工作或者收管作業的后期工作,因此用于分析的力學模型與收棄管分析模型相同。棄置時海洋管道通常將脫離托管架或其他支撐結構,A&R絞車的鋼繩通過海洋管道封頭將管道從海面緩慢下放到海底,回收時A&R絞車的鋼繩通過海洋管道封頭將管道從海底緩慢拉升到海面上,此過程被稱為海洋管道的單點提放。在這個往復過程中,管道經歷了一個大變形和小變形相互轉化的變形過程。
1 控制微分方程
海洋管道從海底提升到海面或者從海面下放到海底,這兩個物理過程是互逆的,可以用同一個數學模型進行描述。在管道提放作業時通常要求海洋環境平穩,管道提升或者下放速度緩慢,因此可把問題處理成靜態問題。另外可認為海底為剛性水平面[1],海洋管道由各向同性材料組成,且提升和下放過程中始終處于彈性狀態。在上述條件下,不考慮海水流動效應,取懸空管段進行研究,如圖1所示。以懸空管道與海床的接觸點(觸地點)為原點o,建立笛卡爾坐標系。再沿管線建立自然坐標系,顯然該管線上的物理量均為管線弧長的單變量函數。令管道與水平方向的夾角為θ,長度為L,材料彈性模量為E,截面慣性矩為I,水中的單位線重為w,上端點受拉力T0作用,與水平方向成夾角θ0,管線原點處橫截面的水平力為H0,鉛垂力為V0。其中鉛垂力V0的可能來源有且僅有兩個,一個是左邊管道對其剪力,另一個是剛性接觸海床對其向上的支撐力。由于通常認為左邊管道沒有彎曲變形,其彎矩為零,因此其相互剪力也為零,否則左邊管道必然彎曲。由此可知原點處的鉛垂力就是剛性海床對其向上的支撐力。
根據文獻[2-5],如圖1所示的海管提放問題可以用如下微分方程描述:
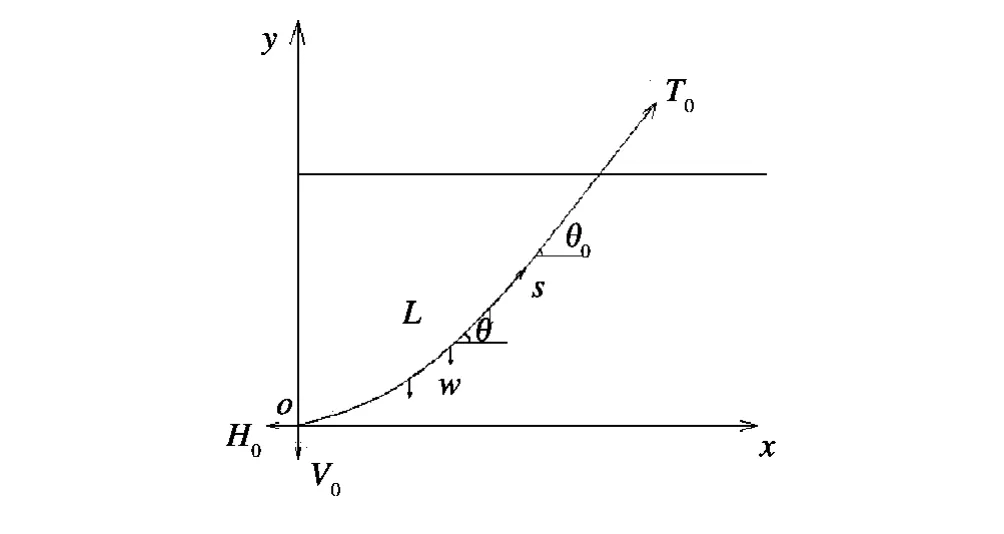
圖1 管道單點提放力學模型Fig.1 Mechanical model of pipe lifting or lowering by one point

根據水平和垂直方向上力的平衡有:

將式(2)、(3)代入方程(1)得:

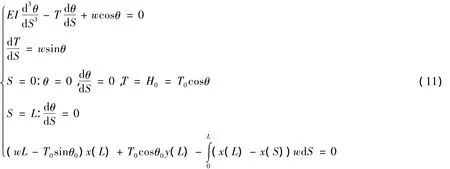
根據文獻[6],該問題也可以用以下控制微分方程組描述:

用這兩種微分方程對管道收放問題進行分析,結果差異何在?這兩種控制微分方程是否都能很好地描述海洋管道的提放過程?哪種微分方程更好地描述海洋管道的提放過程?為了回答上述及相關問題,將以兩種微分方程為核心建立海洋管道提放過程的三個分析模型,并借助數值計算方法分別進行求解,然后對計算結果進行分析。
2 邊界條件
分析海洋管道提放過程中邊界處的形態和受力情況,通常認為有如下邊界條件[3,5-7]:
觸地點處:撓度 y(0)=0,轉角 θ(0)=0,水平力 H0=T0cosθ0,彎矩 M(0)=0。
上部端點處:彎矩M(L)=0,拉力為T0。
3 懸空管道長度
懸空管道長度L是求解本問題的關鍵參數,不能預先確定。文獻[1]認為剛性海床情況下提起段長度等于2倍的提升力除以管道線重,文獻[2-3]根據幾何條件確定懸空管道長度,而文獻[5-8]都用各自的迭代方法確定該參數。與這些方法不同,將根據力學原理提供一個新的確定懸空管道長度的公式。
考慮懸空管道的外力對管道上部端點的彎矩,根據彎矩平衡原理有:

將式(2)、(3)代入式(6)得:

式(7)中只有一個獨立未知量變量L,L一旦確定,x(L),y(L)和x(S)就隨之確定,因此可以求解該方程來確定懸空管道長度。求解方法是迭代法,思路為不斷假設一個懸空管道長度L,求解以式(4)或式(5)為控制微分方程的定解問題得到管道形態,直到下式成立:

此時即可認為該長度就是管道懸空長度,其中ε為迭代計算誤差限。
4 數學模型
取微分方程(4),選擇如下邊界條件:觸地點處的轉角為零,上部端點處的彎矩為零,再結合式(7),得到分析模型1,即:
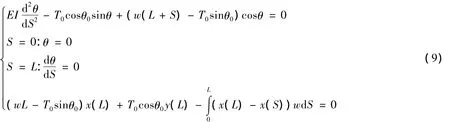
取微分方程(4),選擇如下邊界條件:觸地點和上部端點處的彎矩都為零,再結合式(7),得到分析模型2,即:
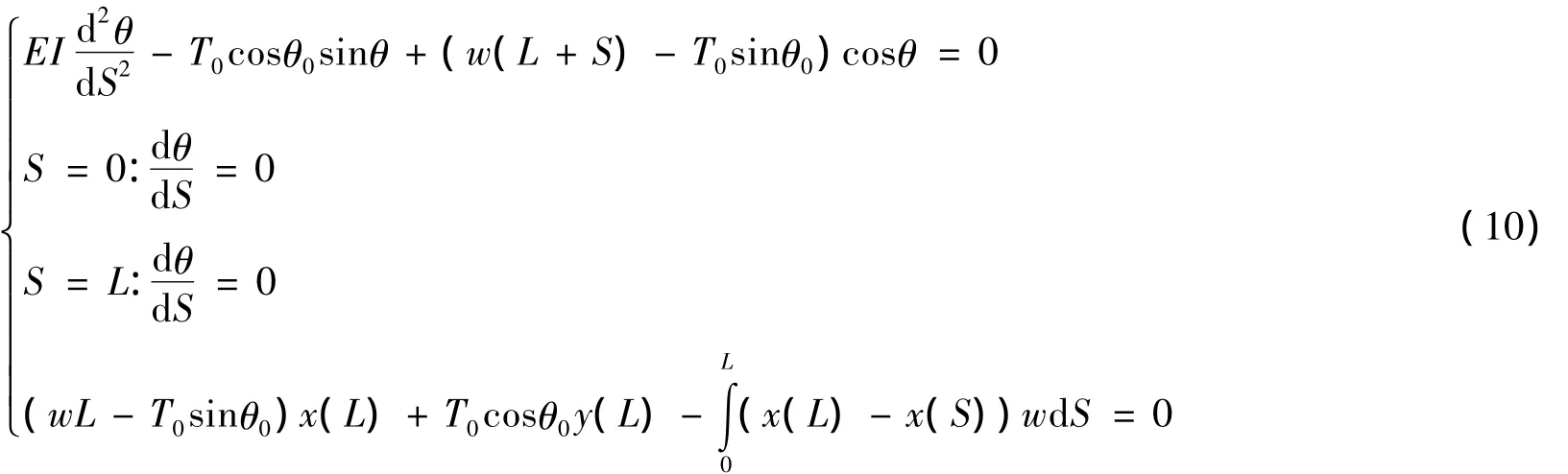
取微分方程組(5),選擇如下邊界條件:觸地點處的轉角為零,彎矩為零,水平力為T0cosθ0,上部端點處的彎矩為零,再結合式(7),得到分析模型3,即:
5 數值求解算例及結果分析
模型1和模型2的未知函數是θ(S),模型3的未知函數是θ(S)和T(S),由于上述微分方程均是高度非線性方程,無法得到其解析形式的解。為了分析這些模型的差異,并找出準確描述海洋管道提放物理過程的數學模型,下面對它們進行數值求解。
采用MATLAB作為求解環境,利用其中的內置函數bvp4c[9]求解如表1、2所示的一組具體參數對應的分析模型1、2和3,計算結果如圖2所示。

圖2 不同拉力作用時管道的轉角、形態和彎矩Fig.2 Angle,configuration and bending moment of pipe loading under different tension
從計算結果圖2中可以發現以下主要特點:
1)模型3確定的懸空管道長度在三個模型中是最大的,模型2確定的懸空管道長度最小;
2)模型1的彎矩極值在三個模型中是最大的,發生在觸地點處,模型2的彎矩極值總是最小,模型2和3的彎矩極值都不發生在觸地點處;
3)彎矩極值隨著懸空管道長度的變化而變化,其先隨懸空管道長度增加而增加,之后隨懸空管道長度增加而減小,最大值發生在懸空管道約100 m處;
4)隨著載荷增大三個模型的解越來越接近,在懸空管道長度小于1 000 m時,三個模型的轉角、形態和彎矩的結果差別較大,且長度越小差別越大。在懸空管道長度大于1 000 m時,模型2和模型3的轉角、形態和彎矩的計算結果幾乎相同,但是模型1的結果與其它兩個模型在彎矩的極值及其發生位置存在較大差異;
5)從圖2(a)~(d)中可以清楚看出,模型1的彎矩極值發生在觸地點,這與實際情況矛盾,而模型2在觸地點的轉角值也與該問題的邊界條件矛盾。
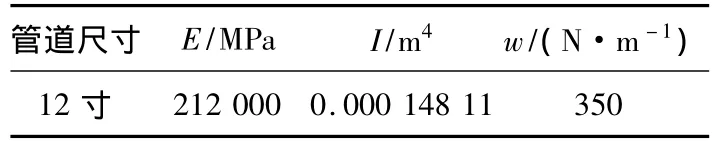
表1 材料幾何參數Tab.1 Geometrical and material parameters

表2 載荷參數Tab.2 Loading parameters
根據計算結果的特點,可以初步判定描述海洋管道提放全程的數學模型應該采用分析模型3。為了進一步證實該模型的正確性,作者以分析模型3為理論模型,編寫開發了海洋管道提放靜力學分析軟件DRICAS,采用上文中的管道材料幾何參數,重新計算了如表3所示載荷情況下的管道形態。

表3 載荷參數Tab.3 Loading parameters
將其形態計算結果與專業海洋工程有限元分析軟件OrcaFlex的計算結果進行對比,可以看到兩者的計算結果在各個載荷情況下都是一致的,如圖3所示。這進一步證實了模型3的正確性。
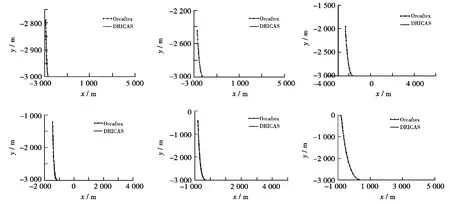
圖3 DRICAS和OcraFlex形態結果對比Fig.3 Configuration results comparison between DRICA and OcraFlex
6 結語
通過三個模型的數值求解和分析表明:
1)對海洋管道緩慢單點提放進行全程分析宜采用模型3,它能準確描述管道提放的完整過程;其中該問題的邊界條件是觸地點處水平轉角為零,彎矩為零,受到提升載荷水平分量大小的拉力,上部端點處彎矩為零;另外懸空管道長度可以根據彎矩平衡原理確定。
2)因為彎矩極值位置不合理,模型1不能準確描述海洋管道單點提放過程并用于管道的力學分析。
3)懸空管道長度小于900 m時,模型2不能準確描述海洋管道單點提放過程;懸空管道長度大于1 000 m時,模型2與模型3計算結果的相對誤差很小,且懸空管道越長相對誤差越小,因此在懸空管道長度大于1 000 m時可用模型2代替模型3,從而減少計算機數值計算時間。
4)彎矩極值隨著懸空管道長度變化而變化,其先隨著懸空管道長度增加而增加,之后隨著懸空管道長度增加而減小,最大值往往發生在管道提升過程的中前期或者下放過程的中后期。
[1] 邢靜忠.海底管道離地點的接觸條件探討[J].力學與實踐,2005,27(5):57-60.
[2] 宋甲宗,戴英杰.海洋管道鋪設時的二維靜力分析[J].大連理工大學學報,1999,39(1):91-94.
[3] 戴英杰,宋甲宗,馮 剛.海底管道收棄管作業分析[J].海洋工程,2000,18(3):75-78.
[4] 邢靜忠,柳春圖,曾曉輝.海洋石油管道單點提升分析[J].海洋工程,2002,20(3):29-33.
[5] 曾曉輝,柳春圖,邢靜忠.海底管道鋪設的力學分析[J].力學與實踐,2000,24(2):19-21.
[6] Charles P.Sparks.Fundamentals of Marine Riser Mechanics[M].Tulsa,Oklahoma:PennWell,2007:254-256.
[7] 詹 侃,陸仁華.海底管道在鋪設過程中的二維靜態分析[J].海洋工程,1991,9(4):14-20.
[8] 帥 健,呂英民,張進國.用動坐標迭代法分析海洋管道敷設時的應力[J].油氣儲運,1996,15(10):21-24.
[9] Shampine L F,Gladwell I,Thompson S.Solving ODEs with MATLAB[M].New York:Cambridge University Press,2003:133-211.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06