擠壓式狀態切換吸振器設計
2013-10-14 06:56:40方坤倫周杰趙君麟
機械制造與自動化 2013年5期
方坤倫,周杰,趙君麟
(南京理工大學機械工程學院,江蘇南京 210094)
0 引言
振動是工業生產與日常生活中普遍存在的物理現象,在大多數情況下振動均有害,常干擾機器設備正常運行、破壞房屋建筑承載結構、發出噪聲污染環境,因此,要對有害振動加以控制。控制振動方法最常見的有消振、隔振和吸振[1]。消振是消除或減弱振源的自身振動,是一種治本的方法,但很難實現。隔振是在振源和受控對象間增加隔振元件,以降低受控對象對振源的反應,在工程中應用較廣泛,如高層結構抗風、大跨結構抗震等。吸振是在主體上附加一個子系統產生吸振力從而反作用于受控主體,以降低主體振動,一般可與隔振方法同時使用,在隔振基礎上可進一步控制主體振動。吸振分為被動吸振和主動吸振。1902年Frahm發明了動力吸振器(dynamic vibration absorber DVA),至今已有近百年的歷史。動力吸振器一般是由振子和彈性元件以及阻尼元件組成。由于它具有結構簡單,能有效地抑制頻率范圍變化較小的結構與設備的振動的優點,因此在工程實踐中得以廣泛的應用。但傳統的動力吸振器的有效吸振帶寬極窄,一般只針對振動系統的一個頻率[2]。而實際的振源往往復雜而且頻帶變化較大,這就大大限制了動力吸振器的應用范圍。主動吸振又分為全主動控制吸振和半主動控制吸振[3]。全主動控制吸振器是一種利用主動力來實現振動控制的裝置。它在傳統的被動式吸振器的基礎上引入了能夠實際控制的主動力環節。其工作原理是利用主動力環節為減振對象提供一個與激勵力等值反向的主動力,使其與激勵力相抵消從而達到振動控制的目的。全主動式動力吸振器的最大優點是在其工作范圍內可以達到極高的減振效果,而且其吸振頻段相對于傳統的動力吸振器也有較大拓展。然而,全主動式動力吸振器的缺點在于其需要附加較大的能量,特別是當減振頻率遠離其固有頻率時,所需附加的能量會急劇上升,增加了系統的復雜性,降低了整個系統的穩定性。半主動控制吸振器是一種參數調節式動力吸振器,其基本組成與傳統的被動式吸振器相同,不同的是其內部參數可調。其只需要較少的能量就可以實現自身的某個參數可調,從而改變自身的固有頻率。通過這種方式它可以實現對激勵力頻率的實時跟蹤,使吸振器保持在最佳的減振狀態。
磁流變彈性體(magnetorheologieal elastomers)是磁流變材料的一個新的分支,它是由軟鐵磁性顆粒和聚合物基體組成,它的力學、電學諸性能可以由外加磁場來控制。即在磁場作用下,磁流變彈性體內部顆粒被磁化后,產生相互作用力。在磁流變彈性體受到形變時,這些磁力在其內部形成反向力矩,增強材料抵抗變形的能力,這種能力會隨著磁場的變化而發生變化。從宏觀上看,表現為彈性模量隨磁場而變化,即磁流變彈性體的剛度隨磁場而變化。因此,磁流變彈性體在外加磁場下會產生磁致模量和磁致阻尼。這種現象統稱為磁流變彈性體的磁致效應[4]。同時,內部的軟磁性顆粒具有較小的剩磁,故磁流變彈性體在磁場作用下還具有良好的可逆性。由于它兼有磁流變材料和彈性體的優點,如響應快,可逆性好,可控能力強等,又克服了磁流變液沉降、穩定性差等缺點,因而近年來成為磁流變材料研究的一個熱點。
根據磁流變彈性體的受力方向和外加磁場方向的不同,可以分為不同的工作模式。目前常用的兩種工作模式為剪切式和擠壓式,剪切式,這種工作模式下的磁流變彈性體其外加磁場方向與顆粒的成鏈方向平行,而外加載荷的方向與成鏈方向垂直,顆粒鏈受到剪切,所以稱之為剪切模式。擠壓式,在這一工作模式下的磁流變彈性體,其外加磁場方向與顆粒的成鏈方向是平行的,而外加載荷方向與成鏈方向也平行,即基體中的顆粒受到擠壓,因此稱之為擠壓式。在這一工作模式下的磁流變彈性體減振器具有非常強的非線性,但其結構簡單,可以承受較大的載荷,本文設計的磁流變彈性體減振器即工作在這一模式下。
1 磁流變彈性體材料的制備
磁流變彈性體的基本制備方法主要分為有磁場制備和無磁場制備兩種。為獲得更大的磁流變效應,提高系統的靈敏度,本文選用有場下制備磁流變彈性體。
1.1 實驗材料及主要設備
Ni粉、天然橡膠、橡膠防老劑RD、液體石蠟、硫化促進劑DM、硫磺粉、天平、雙輥煉膠機、電熱式平板硫化機、模具、隔熱手套、直流穩壓電源。
1.2 實驗步驟
稱取10g天然橡膠、5gNi粉、0.3g橡膠防老劑 RD、0.3g液體石蠟、0.1g硫化促進劑 DM、0.3g 硫磺粉;啟動煉膠機,將輥距調至適當距離。放入天然橡膠,輥煉片刻。然后交替加入Ni粉、RD、液體石蠟、硫磺粉、DM。充分輥煉混合物20~30min,輥煉均勻后取下混合物,放置24h;將電熱式平板硫化機的硫化溫度調至80℃,然后將模具放置在硫化機的下平面中間,啟動硫化機加熱模具。等待硫化機的溫度升至調定的數值;帶上隔熱手套,取下模具。用剪刀剪下適量的橡膠、Ni粉的混合物,放入到模具的型腔,然后把模具放進平板硫化機。用導線連接模具和直流穩壓電源,調節電源電壓為20V,此時模具線圈中的電流為1A、模具型腔中的磁場強度為1T。維持此時的溫度和電壓10min,讓橡膠基體中的Ni粉在模具的磁場中形成有序結構;調節硫化機的硫化溫度為153℃,保持此溫度10min,讓橡膠完成硫化過程;關閉硫化機和直流穩壓電源,取下模具,讓其自然冷卻至常溫。開模,取下制備完成的磁流變彈性體。試驗中所用模具及制備出的磁流變彈性體如圖1所示。

圖1 磁流變彈性體
2 吸振器結構設計
2.1 吸振器磁路材料的選擇
根據磁流變彈性體的工作原理可知,磁路中的磁場是動態變化的,因此導磁材料應易被磁化、退磁迅速,其磁滯回線所包圍的面積小,矯頑力低。同時,為了保證磁流變彈性體的工作區域中的磁場強度,導磁材料要有高磁導率、低剩磁特點。綜上,本實驗選擇電工純鐵作為吸振器磁路材料,能滿足本實驗的剛強度要求。
2.2 磁路設計
磁路設計的目的,是設計一個低磁阻的磁路,使得工作區域的磁場能量最大化。而在其他非工作區域,盡量減少能量的損失,減小不必要的漏磁。
磁路設計的典型步驟:1)根據磁流變彈性體的飽和磁化強度,確定磁路中最小磁通量的數值;2)根據串聯磁路磁通量處處相等,和φ=BS(φ為磁通量,B飽和磁化強度,S為磁通面積)確定各磁路的磁路橫截面積比例;3)選擇線圈匝數和電流,NI=∑Rm,Rm為各磁路的磁阻;4)考慮到結構復雜性和發熱等因素,選擇合適的電流,從而確定線圈匝數。本實驗設計的吸振器如圖2。
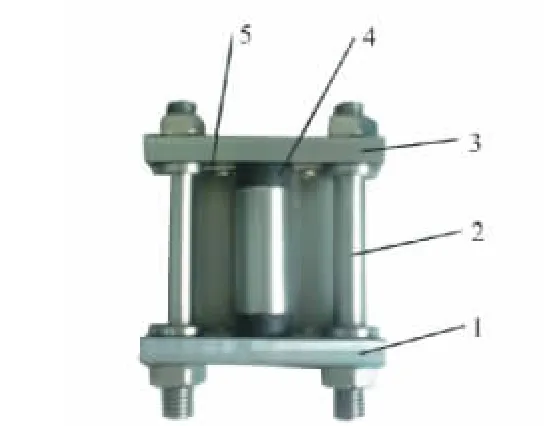
圖2 狀態切換吸振器實物圖
3 結語
本文概述了傳統動力吸振、全主動吸振、半主動吸振技術的各自特點,以及將磁流變彈性體應用于半主動吸振的獨特優點。并從設計實用型磁流變彈性體吸振器的角度出發,試制了高性能的磁流變彈性體,設計制作了實用型的吸振器。為以后高性能的狀態切換吸振器的設計與優化打下了基礎。
[1]顧仲權,馬扣根,陳衛東.振動主動控制[M].北京:國防工業出版社,1997.
[2]Chen Y,David G Z,Viresh K W R,et al.[J].Chinese Journal of Aeronautics,2003,16(4):203-211.
[3]鄧華夏.磁流變彈性體半主動吸振器吸振技術的研究[J].中國科學技術大學,2007.
[4]魏克湘,孟光,等.磁流變彈性體隔振器的設計與振動特性分析[J].機械工程學報,2011,11(47):69-74.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42