水火彎板機(jī)系統(tǒng)中三維重建技術(shù)的研究
2013-10-17 13:28:36程良倫
制造業(yè)自動(dòng)化 2013年15期
關(guān)鍵詞:特征
鐘 華,程良倫
ZHONG Hua,CHENG Liang-lun
(廣東工業(yè)大學(xué) 自動(dòng)化學(xué)院,廣州 510006)
0 引言
在目前的水火彎板機(jī)系統(tǒng)中,主要是利用激光測(cè)距儀對(duì)鋼板加工數(shù)據(jù)進(jìn)行測(cè)量,其主要問(wèn)題如下:須有操作人員的干預(yù),不能實(shí)現(xiàn)全自動(dòng)化的生產(chǎn)。對(duì)一塊10米長(zhǎng)3米寬的鋼板,測(cè)量時(shí)間長(zhǎng)達(dá)十分鐘左右。為了解決這個(gè)問(wèn)題,本論文擬采用基于機(jī)器視覺(jué)的三位重建方法對(duì)鋼板進(jìn)行三維重建,系統(tǒng)直接從三維重建后得到的立體圖形中取得生產(chǎn)所需的尺寸數(shù)據(jù)。
1 研究背景
文獻(xiàn)[1]提出了利用編碼結(jié)構(gòu)光的方法對(duì)頭像進(jìn)行三位重建,重建的精度高,速度快。
文獻(xiàn)[2]提出針對(duì)文獻(xiàn)[1]存在的編碼結(jié)構(gòu)光易受到環(huán)境影響,對(duì)編碼結(jié)構(gòu)光的方式進(jìn)行了改進(jìn)。
文獻(xiàn)[3]指出了相移的缺點(diǎn),并提出線移的概念。投影圖案由等寬的條紋組成。通過(guò)尋找這些相移圖案的邊緣來(lái)增加測(cè)量點(diǎn)密度。
文獻(xiàn)[4]針對(duì)圖像的特征點(diǎn)匹配問(wèn)題,提出了一種基于小波多分辨率特征的字符串匹配算法。
文獻(xiàn)[5]針對(duì)研究并實(shí)現(xiàn)了一種基于多特征約束的分階段立體匹配算法。
針對(duì)廣船項(xiàng)目三維重建的特點(diǎn),本論文提出基于圖像特征點(diǎn)的三維重建方法,以解決目前三維重建方法中存在的點(diǎn)云數(shù)量龐大,設(shè)備精密不適用于工業(yè)現(xiàn)場(chǎng)的問(wèn)題。
2 研究?jī)?nèi)容
基于特征點(diǎn)的三維重建主要包括,照相機(jī)標(biāo)定、特征點(diǎn)坐標(biāo)提取和特征點(diǎn)匹配三個(gè)部分構(gòu)成。
2.1 照相機(jī)標(biāo)定
照相機(jī)的標(biāo)定是為確立圖像中的某一點(diǎn)u(u0,v0)與其空間點(diǎn)U(X0,Y0,Z0)之間的對(duì)應(yīng)關(guān)系,這個(gè)對(duì)應(yīng)關(guān)系可由一個(gè)3×4的矩陣來(lái)表示。
通過(guò)引入攝像機(jī)坐標(biāo)系,照相機(jī)坐標(biāo)系和世界坐標(biāo)系等輔助坐標(biāo)系,推導(dǎo)出得到世界坐標(biāo)系中P(Xw,Yw,Zw)點(diǎn)和其在圖像坐標(biāo)系中的p(u,v)點(diǎn)之間的對(duì)應(yīng)關(guān)系為[6]:
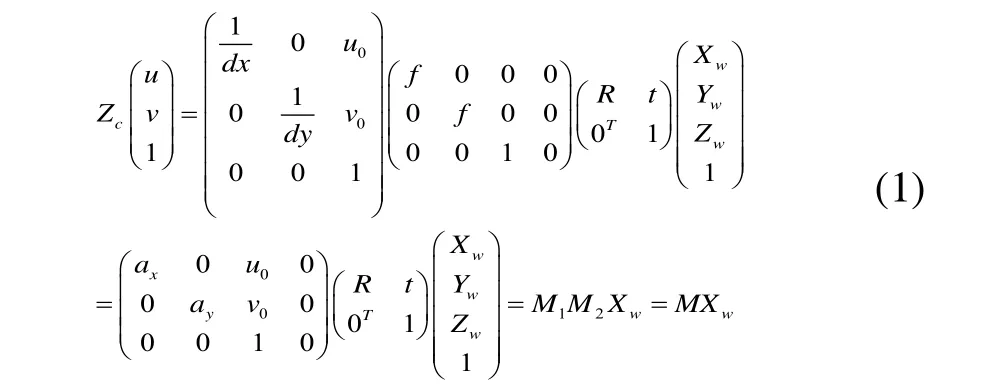
其中M1為照相機(jī)內(nèi)參數(shù)矩陣,M2為照相機(jī)外參數(shù)矩陣。確定M1,M2矩陣參數(shù)的過(guò)程稱為照相機(jī)的標(biāo)定。
本文利用camera calibration tools這個(gè)標(biāo)定工具[7]進(jìn)行標(biāo)定。
2.2 特征點(diǎn)圖像坐標(biāo)系的求取
在廣船項(xiàng)目中,由于三維重建的目標(biāo)物體為大面積的鋼板,表面平整,先用Led點(diǎn)陣向鋼板投影,雙目照相機(jī)對(duì)鋼板拍照如圖1左圖所示,通過(guò)圖像處理,可以得到質(zhì)量較好的右圖像。
視光點(diǎn)為正方形,尋找特征點(diǎn)的工作簡(jiǎn)化為尋找圖像中白色方塊的中心坐標(biāo)。其處理過(guò)程為:
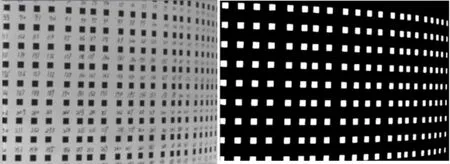
圖1 處理前后的Led點(diǎn)陣圖像對(duì)比
1)特征點(diǎn)的個(gè)數(shù)是不定的,需要用一個(gè)單向鏈表來(lái)保存白色方塊的首個(gè)像素的坐標(biāo),每次檢測(cè)到一個(gè)新的白色方塊,就將此白色方塊的首像素的坐標(biāo)插入鏈表的尾部,直到程序檢測(cè)到所有的白色方塊位置。此鏈表稱為集團(tuán)鏈表。
2)由于白色方塊的大小未定,即每個(gè)方塊中包含多少白色像素點(diǎn)不能確定,所以以集團(tuán)鏈表的每個(gè)節(jié)點(diǎn)為起始點(diǎn),創(chuàng)建一個(gè)新的鏈表,此鏈表稱為子集團(tuán)鏈表,每當(dāng)檢測(cè)到某個(gè)白色像素點(diǎn)屬于某個(gè)集團(tuán),就將此白色像素點(diǎn)納入該集團(tuán)內(nèi)。
對(duì)每個(gè)集團(tuán)鏈表的特征點(diǎn)都采用此方法進(jìn)行聚類,完成整個(gè)數(shù)據(jù)結(jié)構(gòu)的建立。
完成整體數(shù)據(jù)結(jié)構(gòu)的創(chuàng)建以后,遍歷每一個(gè)子集團(tuán)鏈表,得出其第一個(gè)結(jié)點(diǎn)圖像坐標(biāo)數(shù)據(jù)(x0,y0)和最后一個(gè)結(jié)點(diǎn)圖像坐標(biāo)數(shù)據(jù)(xn,yn)的數(shù)據(jù),則此白色方塊的中心坐標(biāo)(xc,yc)可有下列的公式得到:

數(shù)據(jù)結(jié)構(gòu)如圖2所示。

圖2 數(shù)據(jù)結(jié)構(gòu)形成示意圖
2.3 特征點(diǎn)匹配
在三維重建中,實(shí)現(xiàn)特征點(diǎn)匹配是一個(gè)關(guān)鍵問(wèn)題。
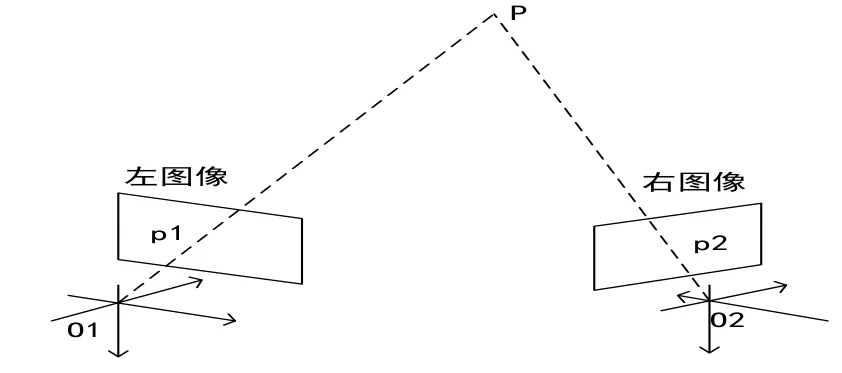
圖3 雙目照相機(jī)示意圖
對(duì)于兩圖像的集團(tuán)鏈表來(lái)說(shuō),其特征點(diǎn)是相對(duì)應(yīng)的。也就是說(shuō)按照從上到下,從左到右的順序,左右圖像特征點(diǎn)是相互對(duì)應(yīng)的。對(duì)左右兩幅鋼板圖像進(jìn)行特征點(diǎn)聚類操作,完成特征點(diǎn)的匹配工作。其結(jié)構(gòu)如圖4所示。
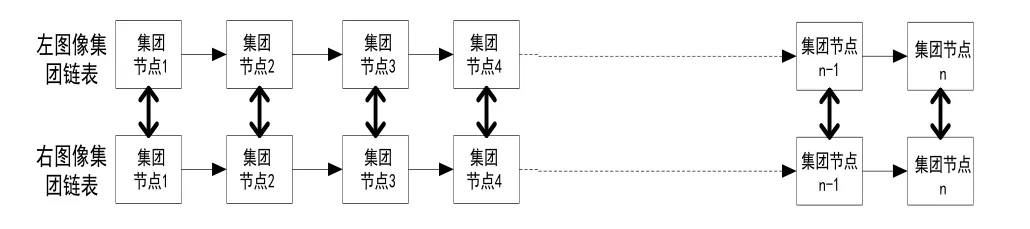
圖4 特征點(diǎn)匹配示意圖
在圖4中,兩個(gè)集團(tuán)鏈表節(jié)點(diǎn)之間的雙向箭頭表示這兩個(gè)節(jié)點(diǎn)所在的特征方塊的中心坐標(biāo)點(diǎn)是一對(duì)特征點(diǎn)對(duì)。
2.4 多個(gè)空間點(diǎn)的重建
在圖3中,左圖像中的某一點(diǎn)p1,其對(duì)應(yīng)為空間直線Pp1,若要得到P點(diǎn),則需要另外一臺(tái)照相機(jī)在另外一個(gè)角度對(duì)P點(diǎn)進(jìn)行拍照,得到右圖像,在有圖像中p2點(diǎn)對(duì)應(yīng)的空間直線Pp2,Pp1和Pp2相交于唯一的空間點(diǎn)P,p1和p2稱為特征點(diǎn)對(duì)。設(shè)其投影矩陣分別為M1,M2,得到下列方程組:
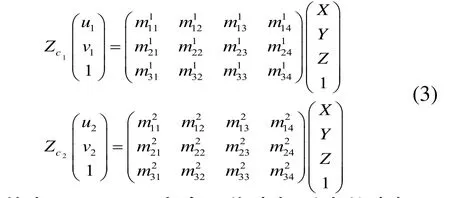
其中(u1,v1)是p1點(diǎn)在圖像坐標(biāo)系中的坐標(biāo),(u2,v2)是p2點(diǎn)在圖像坐標(biāo)系中的坐標(biāo)。(X,Y,Z)是P點(diǎn)在世界坐標(biāo)系中的坐標(biāo)。解這個(gè)方程組,就可以求出P點(diǎn)在空間坐標(biāo)系中的坐標(biāo)。
本論文中的試驗(yàn)用到了34個(gè)點(diǎn),實(shí)驗(yàn)過(guò)程如下。
3 試驗(yàn)數(shù)據(jù)
對(duì)實(shí)驗(yàn)室中任取的一個(gè)弧面進(jìn)行了重建,弧面如圖5左圖所示。
弧面的重建用到了20個(gè)特征點(diǎn),均勻的分布在如圖5左圖的170mm×100mm弧面上,以下為數(shù)據(jù):
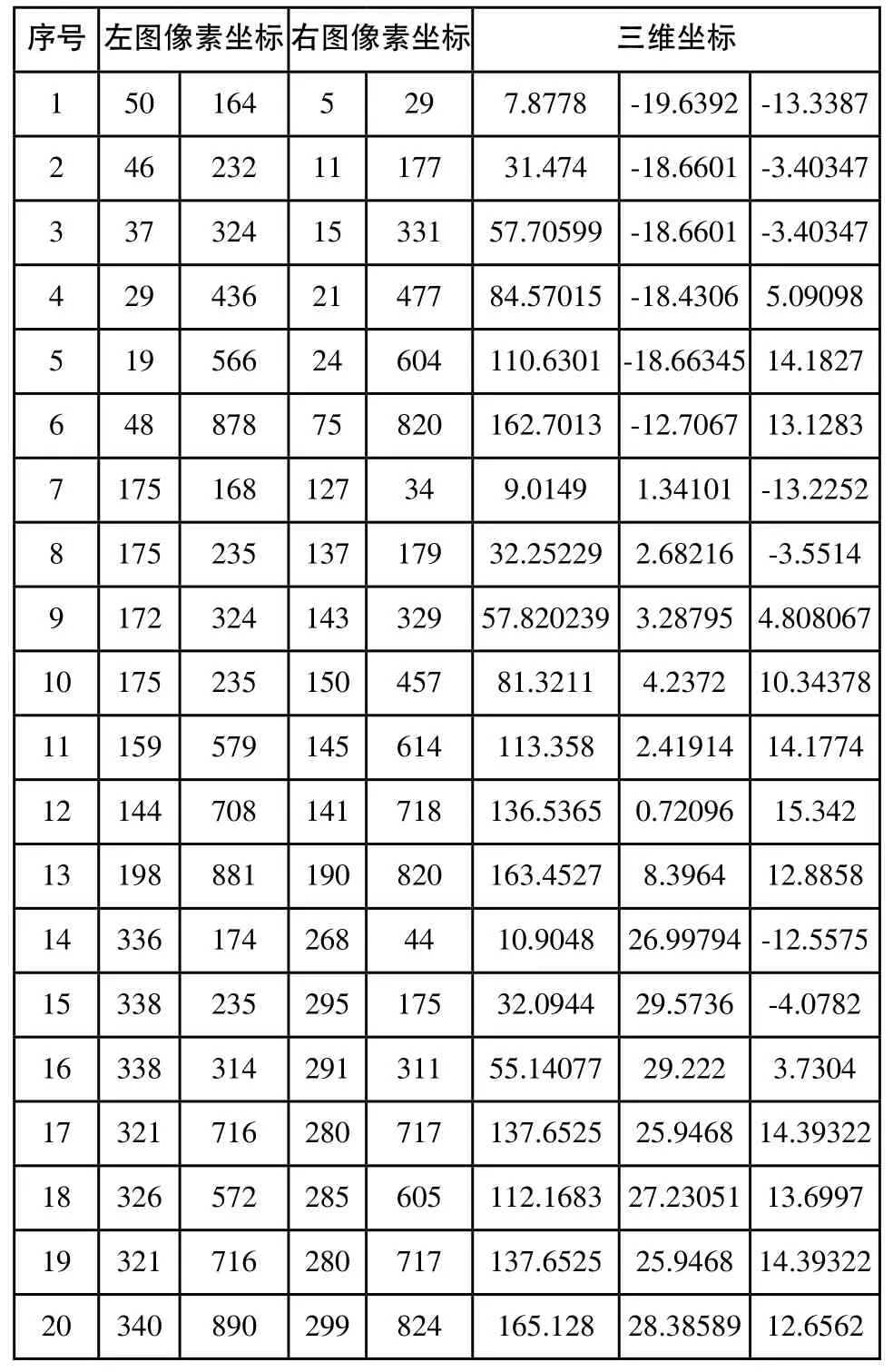
序號(hào) 左圖像素坐標(biāo)右圖像素坐標(biāo) 三維坐標(biāo)1 50 164 5 29 7.8778 -19.6392-13.3387 2 46 232 11 177 31.474 -18.6601-3.40347 3 37 324 15 331 57.70599 -18.6601-3.40347 4 29 436 21 477 84.57015 -18.4306 5.09098 5 19 566 24 604 110.6301-18.66345 14.1827 6 48 878 75 820 162.7013 -12.7067 13.1283 7 175 168 127 34 9.0149 1.34101 -13.2252 8 175 235 137 179 32.25229 2.68216 -3.5514 9 172 324 143 329 57.820239 3.28795 4.808067 10 175 235 150 457 81.3211 4.2372 10.34378 11 159 579 145 614 113.358 2.41914 14.1774 12 144 708 141 718 136.5365 0.72096 15.342 13 198 881 190 820 163.4527 8.3964 12.8858 14 336 174 268 44 10.9048 26.99794-12.5575 15 338 235 295 175 32.0944 29.5736 -4.0782 16 338 314 291 311 55.14077 29.222 3.7304 17 321 716 280 717 137.6525 25.9468 14.39322 18 326 572 285 605 112.1683 27.23051 13.6997 19 321 716 280 717 137.6525 25.9468 14.39322 20 340 890 299 824 165.128 28.38589 12.6562
實(shí)際弧面和Matlab重建的弧面圖形如圖5所示。

圖5 任取弧面和重建弧面
為了驗(yàn)證精度,在這20個(gè)點(diǎn)中任意取7組相鄰點(diǎn),比如取:3、5、8、12、15、17、20這7個(gè)點(diǎn),對(duì)任意兩點(diǎn)間的x,y,z距離進(jìn)行測(cè)量,與三維重建中的三維坐標(biāo)得出的兩點(diǎn)間的x,y,z坐標(biāo)進(jìn)行對(duì)比,得出以下表格:
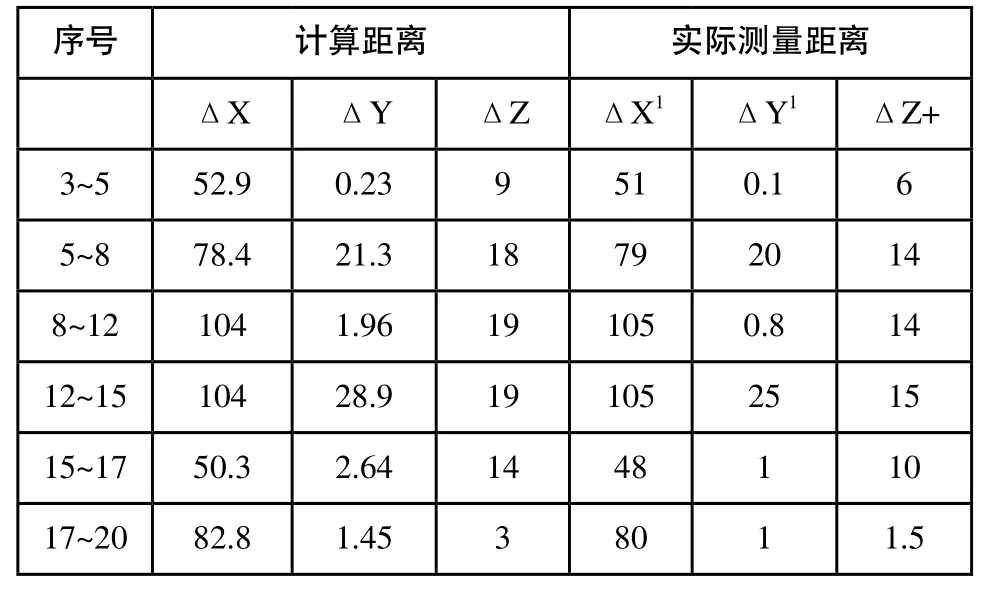
序號(hào) 計(jì)算距離 實(shí)際測(cè)量距離ΔX ΔY ΔZ ΔX1 ΔY1 ΔZ+3~5 52.9 0.23 9 51 0.1 6 5~8 78.4 21.3 18 79 20 14 8~12 104 1.96 19 105 0.8 14 12~15 104 28.9 19 105 25 15 15~17 50.3 2.64 14 48 1 10 17~20 82.8 1.45 3 80 1 1.5
可以看出,此方法得到的三維重建值存在一定的誤差,其中可以看出x,y方向的重建精度高于z方向,z方向的三維重建值普遍大于實(shí)際測(cè)量值,整體數(shù)據(jù)滿足項(xiàng)目的基本要求。
4 結(jié)束語(yǔ)
為了節(jié)約三維重建成本,提出基于特征點(diǎn)的三維重建方法。三維重建結(jié)果滿足項(xiàng)目對(duì)三維重建的精度需求。
[1] 賈小軍,等.編碼結(jié)構(gòu)光系統(tǒng)模型及誤差分析[J].光學(xué)精密工程.2011(4).
[2] 戰(zhàn)麗,劉國(guó)忠.用格雷編碼結(jié)構(gòu)光法測(cè)量三維面形[J].計(jì)算機(jī)測(cè)量與控制.2006(10).
[3] 王忠實(shí),等.棋盤(pán)格模板角點(diǎn)的自動(dòng)定位與識(shí)別[J].中國(guó)圖像圖形學(xué)報(bào).2007,12(4).
[4] 梁錕.基于雙目視覺(jué)的三維重建研究[D].2007.
[5] 張金苓.基于特征點(diǎn)和灰度相關(guān)的雙目視覺(jué)匹配研究[D].2008.
[6] 張正友,馬頌德.計(jì)算機(jī)視覺(jué)[M].北京:科學(xué)出版社,1998.
[7] http://www.vision.caltech.edu/bouguetj/calib_doc/.[EB/OL]
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(bào)(2020年2期)2020-04-01 03:50:40
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:38
