基于SVD-SURF 的寬基線魯棒景象匹配算法
2013-10-21 00:58:16李耀軍趙春暉
火控雷達技術 2013年4期
李耀軍 潘 泉 趙春暉
(1.西安電子工程研究所 西安 710100;2.西北工業大學 西安 710072)
0 引言
寬基線一詞用于圖像配準領域時,泛指待配準圖像間存在著明顯的差異,如較大的位置、角度、尺度及光照等變化[1]。寬基線條件下圖像中即使是同一特征,所表示出來的光學、幾何等特性都有很大不同,加上噪聲、模糊、遮擋等其它因素存在,都大大增加了寬基線圖像配準的難度。寬基線圖像配準中對圖像幾何變換、光照變換、噪聲影響、圖像畸變等因素都能夠保持穩定性的特征,稱為不變特征(Invariant Feature)[1]。鑒于不變特征在圖像配準領域的顯著優勢與巨大應用價值,國內外不少學者對此展開了研究[1-10]。
在衛星導航不可用的情況下,利用景象匹配精確定位輔助慣性導航,是目前無人機容錯型導航系統可靠的備用方案之一。考慮到無人機平臺的特殊性,如飛行姿態實時變化,導致實時圖和基準圖之間存在大角度旋轉、劇烈光照變化等差異,傳統的模板匹配算法由于需要借助無人機平臺的實時運動狀態,如姿態、高度等,預先估計出實時圖相對于基準圖的旋轉因子和尺度因子,然后再進行配準。這不僅增加了系統的復雜度,而且通過航向偏差得到的旋轉角度精度較低,難于補償圖像仿射變換或投影變換帶來的誤差。與傳統模板匹配算法相比,基于不變特征的配準算法在精度和魯棒性方面均具有較大優勢。
SURF 特征,即快速魯棒特征[7](Speeded-Up Robust Features,SURF),它是一種新的局部不變特征算子。SURF 對子區域的梯度信息進行了整合,有效解決了幾何變換、畸變、仿射變換、視角變換、亮度變換、噪聲干擾等情況下的匹配問題。Oconaire C等[8]使用SURF 特征進行圖像定位,Gossow D 等[9]利用SURF 特征進行目標探測,Zhang Zhanyu 等[10]使用SURF 實現視覺同步定位于構圖(SLAM)等。
圖像領域中奇異值[11](singular value decomposition,SVD)作為圖像的一種代數特征,已經在圖像識別中得到成功應用。圖像的奇異值具有良好的穩定性,奇異值反映了圖像的一種代數本質,這種本質不是直觀的,而是一種內在屬性,它具備代數和幾何上的不變性[12]。通過對實時圖與基準圖進行奇異值分解后,將不易受隨機因素干擾的信息作為該模式的特征提取出來,具有增強識別精度、減少運算量和提高運算速度的作用,且奇異值特征具有良好的可區分性、穩定性和獨立性[13]。
面向無人機視覺導航,針對景象匹配的核心技術和難點問題之一,即寬基線條件下的景象匹配,提出一種基于SVD-SURF 的寬基線魯棒景象匹配(SVD-SURF-Based Wide Baseline Robust Scene Matching,S2WB-RSM)算法。深入研究實時圖與基準圖之間發生較大平移、旋轉、尺度變化、亮度變化等條件下的魯棒特征檢測、描述與快速、精確匹配問題。
1 奇異值特征向量
1.1 奇異值分解[14]
若矩陣A∈Rm×n,則存在正交矩陣U={u1,u2,…,um}∈Rm×m,V={v1,v2,…,vn}∈Rn×n,使得UTAV=diag{σ1,σ2,…,σp}=W,p=min(m,n),即A=UWVT,則稱為A 的奇異值分解。其中,σ1≥σ2≥…≥σp≥0,σi(i=1,2,…,p)為A 的奇異值,是AAT或ATA 的特征值的平方根,即
1.2 奇異值特征向量
a.特征向量
定義 設A 是n 階方陣,若有數λ 和非零向量x,使得

稱數λ 是A 的特征值,非零向量x 是A 對應于特征值λ 的特征向量。
b.奇異值特征向量的幾何性質
奇異值向量具有如下幾何性質[11,15,16]:
· 穩定性。由于奇異值特征向量具有良好的穩定性,所以它對圖像噪音、圖像光照條件引起的灰度變化具有不敏感的特性。
· 轉置不變性。A 和AT有相同的奇異值,即對應于同一個奇異值特征向量。
· 旋轉不變性。圖像A 和旋轉后的圖像有相同的奇異值特征向量。
· 位移不變性。對圖像的位移變換可歸結為對圖像矩陣作行(或列)的置換,原始圖像A 與其交換兩行(或兩列)后的圖像有相同的SVD 特征向量。
· 鏡像變換不變性。若對任何一個正交于x的向量y,有關系T(y+ax)=y-ax,其中,a 是實常數,則稱變換T 為鏡像變換。奇異值特征向量具有鏡像變換不變性。
c.奇異值特征向量降維[17]
根據奇異值分解的定義,m×n 維圖像矩陣奇異值分解后,得到的奇異值個數為p=min(m,n)。如果對p 個奇異值特征進行匹配,由于p 值較大,導致計算量較大,嚴重影響匹配的實時性。若根據定理1 和定理2 對奇異值特征向量進行降維[12],保留圖像矩陣的較大奇異值,即忽略較小奇異值,再進行匹配,則可大大減小計算量,極大提高匹配的實時性。
定理1 若矩陣A ∈Rm×n,A 的SVD 由上述定義給出,且σ1≥σ2≥…≥σr?σr+1=…=σp=0,p=min(m,n),則其中,Ur={u1,u2,…,ur},Vr={v1,v2,…,vr},Wr=diag(σ1,σ1,…,σr)。
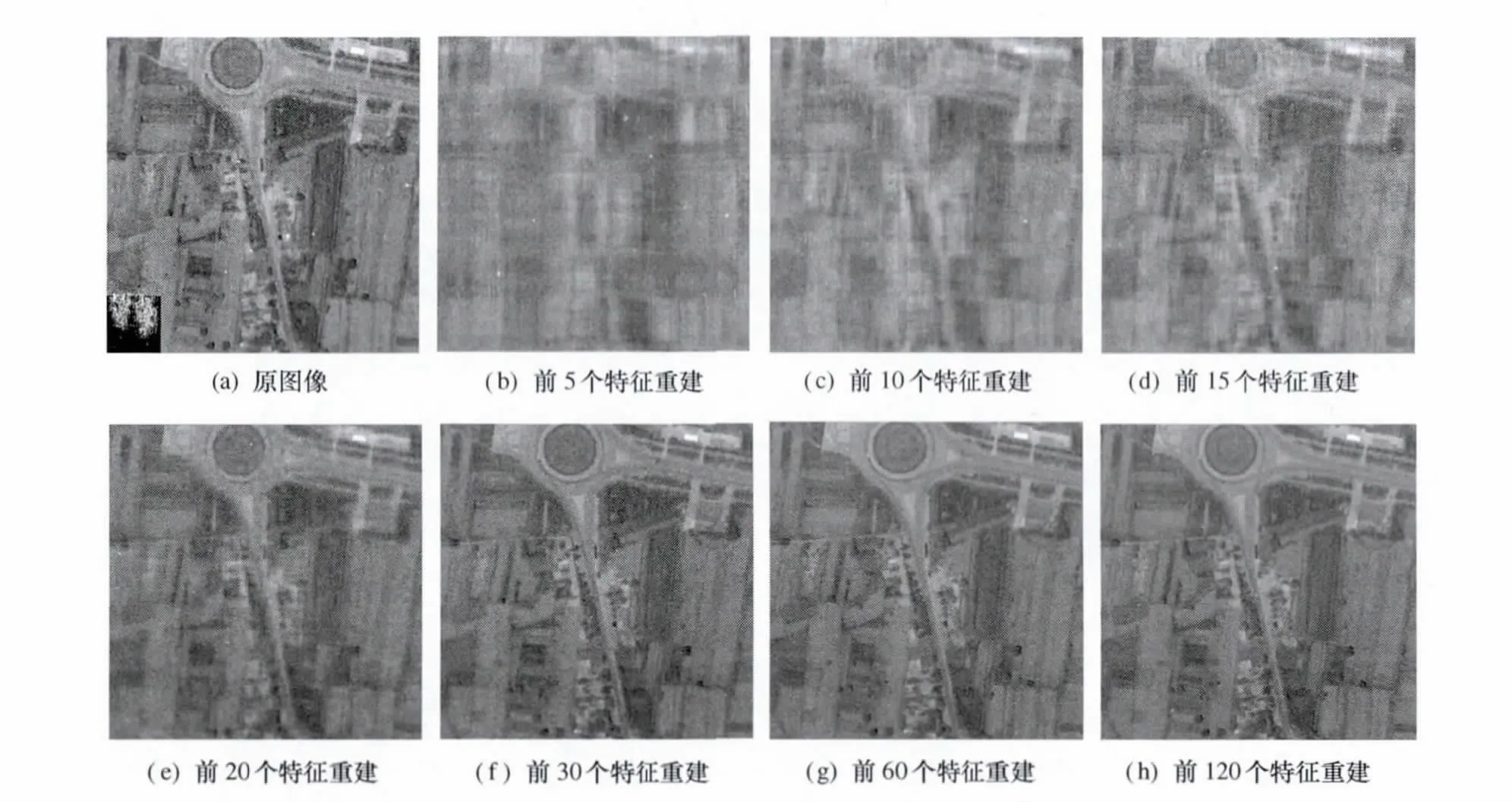
圖1 原圖像和重建后的圖像
定理1 將矩陣表示成了秩r 矩陣的和,同時將矩陣中向量組的相關性問題轉化為矩陣的非零奇異值個數問題。此時,矩陣的秩等于非零奇異值個數。
定理2 假設A ∈Rm×n,A 的SVD 由上述定義給出,且rank(A)=r ≥s,m,n,r,s 均為正整數。若Ws因此,rank(As)=rank(Ws)=s,則‖A
定理2 表明,在Frobenious 范數意義下,As是在空間Rm×n
s (秩為s 的m×n 維矩陣構成的線性空間)中A 的一個降秩最佳逼近。也即是說,在Frobenious范數意義下,As是A 中所有秩為s 矩陣的一個最佳逼近。從定理1 與定理2 可知,奇異值特征向量降維是舍棄某些較小奇異值的過程。將圖像矩陣進行奇異值分解,再通過奇異值特征向量降維可獲得圖像矩陣的有效秩。這里,有效秩為所保留的奇異值個數。由保留奇異值生成的新圖像矩陣是原始圖像矩陣在Frobenious 范數意義下的一個降秩最佳逼近[17]。
奇異值特征向量降維時要在計算復雜度和正確識別率之間權衡。選的特征數太少影響識別,太多會增加計算量。圖2 從左向右依次是原圖像及其相應的提取5、10、15、20、30 個特征重建后的圖像。從圖1 中可以看出30 個特征重建后的圖像和原圖很接近,從直觀上說明奇異值特征向量降維是可行的,并可大幅度減小特征匹配的計算量,提高景象匹配的實時性。
d.奇異值特征向量排序[13]
奇異值向量中的特征均為從大到小排序,亦即,所有類別樣本的奇異值向量具有結構相似的模式特征,這種特征雖然具有獨立性,但其可區分性和穩定性較弱。如果直接將該矢量輸入支持向量機訓練,則其學習能力和推廣能力都很差。對特征矢量的分量進行重排序,從而使得相同類別圖像具有相同的結構特征和不同類別圖像具有不同的結構特征,從而使其特征具有可區分性、穩定性和獨立性。文獻[15]給出了詳細過程。
2 S2WB-RSM 算法原理
為實現S2WB-RSM 算法,首先需要對實時圖與基準圖分別進行奇異值分解、特征向量降維和歸一化及排列。在此基礎上,構建了SURF 尺度空間,運用快速Hessian 矩陣定位極值點,計算出實時圖的64 維SURF 特征描述子,基于SVD 完成特征向量的特征計算,利用SVD 算法建立匹配矩陣并獲得特征點間的對應關系。然后,基于Hessian 矩陣跡完成特征點匹配。最后,使用隨機抽樣一致性(RANSAC)方法剔除出格點,實現位置參數的精確估計。
2.1 奇異值特征向量提取
S2WB-RSM 算法奇異值特征向量提取共六個步驟,具體如下:Setp 1:圖像數字化;Setp 2:圖像灰度化;Setp 3:圖像奇異值分解;Setp 4:特征值向量提取;Setp 5:特征值向量排序;Setp 6:前k 較大特征向量提取。
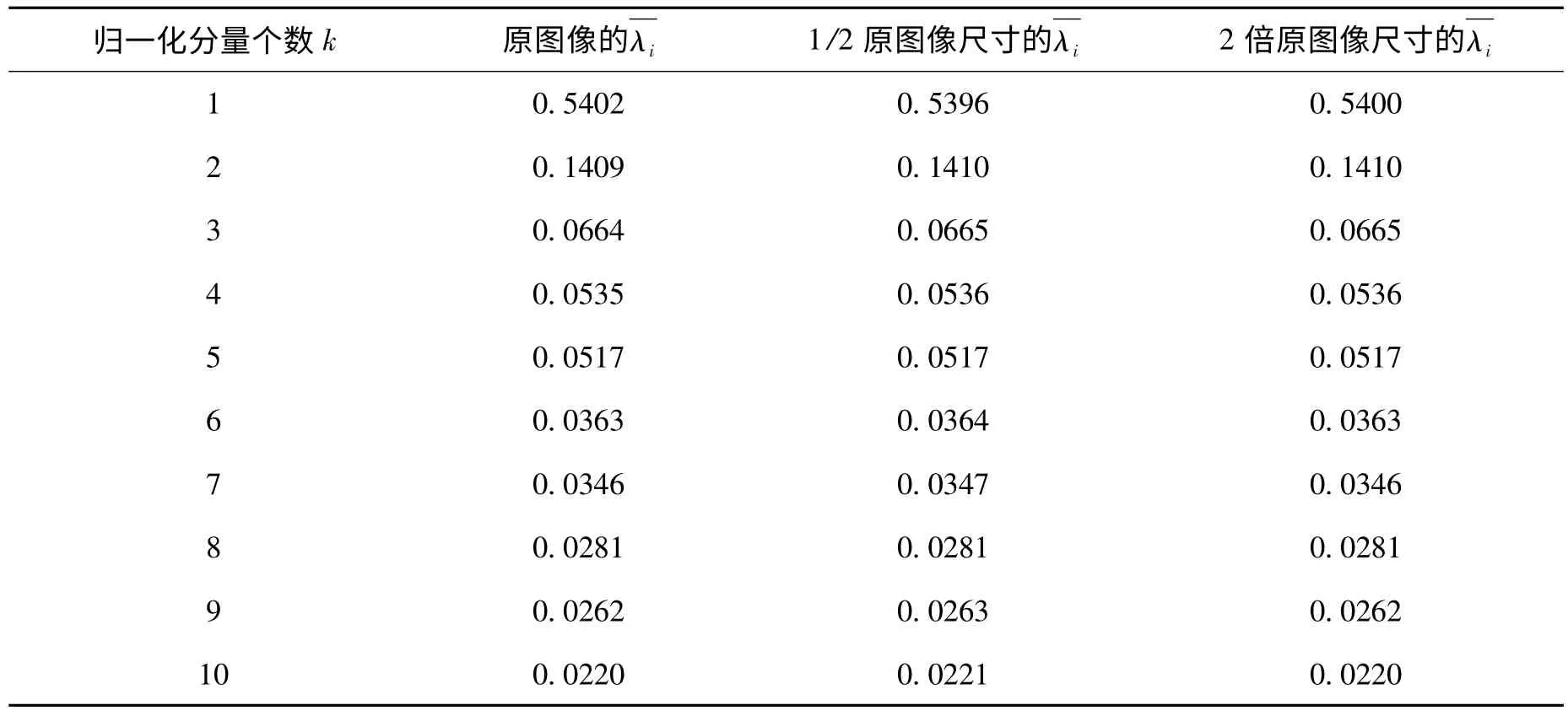
表1 圖像縮放變換時奇異值特征矢量的前k 個歸一化分量(k=10)
矩陣奇異值分解具有穩定性。當圖像縮放程度不大時,奇異值特征矢量的誤差可視為小范圍內的噪聲擾動,對景象匹配的配準誤差影響并不大。所以,奇異值特征矢量的不變性可顯著提高景象匹配的魯棒性。表1 顯示了圖像縮放變換時奇異值特征矢量的前k 個歸一化分量,其中

通過計算圖像縮放變換時奇異值特征矢量的前10 個分量,驗證了圖像奇異值特征矢量在縮放變換下具有的不變性。實驗表明,該性質與奇異值特征矢量在其他變換條件下的不變性一樣,是奇異值特征矢量作為圖像代數特征的一個重要體現。
2.2 SURF 特征提取與匹配
為了實現SURF 特征提取與匹配,首先構建SURF尺度空間,運用快速Hessian 矩陣定位極值點,計算出航空圖像的64 維SURF 特征描述子;然后,基于Hessian 矩陣跡完成特征點匹配;最后,使用RANSAC 方法剔除出格點,實現位置參數的精確估計。
上述SURF 特征提取與匹配過程主要包括兩個部分:無人機航空序列圖像的SURF 特征描述子提取和無人機航空序列圖像的SURF 特征點匹配。具體實現步驟如下:Setp 1:多尺度空間構建;Setp 2:快速Hessian 矩陣檢測;Setp 3:SURF 特征描述子提取;Setp 4:基于Hessian 矩陣跡的特征點匹配;Setp 5:基于RANSAC 的局部參數估計。
2.3 算法性能分析
a.復雜度分析
主要從兩個過程對S2WB-RSM 算法的復雜度進行分析與優化:多尺度空間構建和特征描述子的建立。下文以尺度不變特征變換(SIFT)算法為參照,對S2WB-RSM 算法的復雜度作深入分析。在多尺度空間構建方面,高斯拉普拉斯(LOG)算子被認為是準確性最高的,但其在算法的時間復雜度方面卻很欠缺,SIFT 算法采用的高斯差分(DOG)算子,在很大程度上近似于LOG 算子,但因為采用了以階差分來近似作為尺度空間的值,避免了梯度的求解,從而降低了時間復雜度,但仍不可避免的要在構建尺度空間時要對每個點作不同的浮點高斯卷積運算,程序的時間復雜度仍很大。而算法在特征點的提取方面采用了另外的一種方法,即使用Hessian矩陣的值作為點該尺度空間的值,Hessian 矩陣采用的方法在原理上和LOG 算子也有很大的相似處,二維的高斯函數是LOG 算子的基礎,Hessian 矩陣的分量Dxx、Dxy、Dyy,分別和高斯函數的二階方向導數?2g(σ)/?x2、?2g(σ)/?x?y、?2g(σ)/?y2對應的相似關系,因此采用Hessian 矩陣的方陣值來表示多尺度空間的值有近似的效果,而且由于算法事先已經計算出了圖像的積分圖像,若計算任意區域的點則只要采用查表法就可實現,避免了DOG 算子在構建尺度空間時進行大量的浮點運算,從而加速的尺度空間的構建過程。
在特征描述子的建立方面,兩者的復雜度也有稍微的不同。SIFT 算法為了得到更穩定的特征點,在局部區域進行了特征點的重新估算,在主方向的基礎上,找到了其副方向,并對特征點的方向進行了旋轉,保證了特征點的方向不變性,并用臨近區域點的加權特征值生成最終的128 維特征向量。而算法是對局部區域在x,y 方向求出了harr 函數的小波相位,并用高斯加權最終生成需要的64 維特征向量,因此,算法在時間復雜度方面較SIFT 優勢明顯。
b.實時性與精確性分析
本次實驗數據來自某型無人機實測數據,基準圖分辨率為5m/pixel,速度約120km/h,航高2000m,直線平飛,相機幀率25fps,尺寸320 ×240pixel,數據記錄30min。實驗驗證如表2 所示,S2WB-RSM 算法的實時性較強(≥30Hz),所耗時間幾乎是基于SURF 特征算法的1/10;而且匹配精度較高(≤10m),精度提高近一倍,比較適合于無人機視覺導航應用。

表2 S2WB-RSM 算法的實時性和精確性參數統計表
2.4 算法實現流程
S2WB-RSM 算法主要包括SVD 特征計算模型、多尺度空間構建、快速Hessian 矩陣檢測、SURF 特征描述子提取、基于Hessian 矩陣跡的特征點匹配以及基于RANSAC 的局部參數估計等六個過程。具體流程如圖2 所示。

圖2 S2WB-RSM 算法流程圖
a.SVD 特征計算模型
對實時圖與基準圖分別進行奇異值分解、奇異值特征向量降維、特征矢量歸一化(實現奇異值特征的比例不變性,把所有數據歸一到區間[-1,1])、特征矢量排列等步驟后構成特征庫,用于SURF 特征提取與特征匹配;由于奇異值特征向量從較大維數降低到較小的維數,從而大幅度減小了計算量,同時提高了匹配的可靠性。
b.多尺度空間構建[18]
相鄰尺度差和高斯二階導的大小有關,采用9 ×9 濾波器,高斯二階導的大小定為3,其濾波器大小的1/3,即9×1/3=3。計算下一個濾波器的大小,為了保證濾波器的中心位于像素點上,要對第一層的濾波器增加偶數像素。這樣濾波器的大小就增加了6 像素,即下一層的濾波器的大小變為15。濾波器尺寸可用size=3+5s 公式計算。其中,s 是σ 的倍數。
c.快速Hessian 矩陣檢測
對于圖像I 中一個給定的點X=(x,y),Hessian矩陣中采用近似的高斯核函數,即箱式濾波器Dxx、Dxy、Dyy,9×9 的濾波器是對高斯核函數在σ=1.2 處的近似。為保持計算精度,引入高斯核函數和高斯核函數的比例因子ω,Hessian 矩陣的行列式變形為

實驗中ω 取常量0.9,對位置估計精度影響較小,且可大幅降低算法復雜度。
d.SURF 特征描述子提取
極值點的主方向計算首先以極值點為中心選取半徑為6d 的圓形區域(d 即極值點所在尺度),計算哈爾小波在x 和y 方向上的響應值,記為hx、hy。以σ=3s 為加權因子對兩個響應值高斯加權,記為Whx、Why。對Whx、Why用直方圖統計并將360°均分為72 組,以極值點為中心的圓均分為6 個區,統計各60° 扇區內的Whx、Why,記為∑Whx、∑Why,同時計算該區的梯度值,梯度值最大區域所在的方向即為該極值點的主方向,以∑Whx、∑Why反正切計算出主方向度數。
為了提取極值點描述子,需要在極值點周圍選取20 ×20 大小的區域。首先以極值點為中心,將區域的方向旋轉到極值點的方向。將這個正方形區域分成4 ×4 共16 個子區域,每個子區域里有(20/4=5)5 ×5 的像素。這里之所以選擇4 ×4 大小的子區域,在每一個子區域分別計算每個像素點在哈爾小波x 和y 方向上的響應值。
計算完所有的像素的響應值后,對所有的dx,dy,以極值點為中心進行高斯加權(σ=3.35),分別記為dx,dy,然后求和,記為∑dx,∑dy。并對dx,dy 絕對值求和,記為∑| dx|,∑| dy|,均存入特征向量并歸一化,使得描述子具有光照、尺度不變性,這樣就形成了一個四維的向量:v=對16 個子區域分別求特征向量,形成一個16 ×4=64 維的特征向量,利用該方法對一對實時圖和基準圖進行了SURF 特征點提取。利用該方法對一對實時圖和基準圖進行了SURF 特征點提取,如圖3 所示。
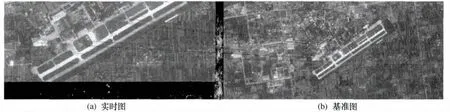
圖3 SURF 特征點提取及基于Hessian 矩陣跡的特征點匹配
e.基于Hessian 矩陣跡的特征點匹配
在Hessian 矩陣跡計算完畢之后,對Hessian 矩陣主對角線求和,即

其中,dx、dy 仍然是積分圖像想濾波器的x 和y方向上的響應值。在進行相似性度量的時候,首先判斷Hessian 矩陣的跡的符號,如果trace(i)是大于0的數,令描述子等于1,反之,令描述子等于-1。
若兩個描述子的trace(i)相同,可繼續比較。反之,后面的描述子則不需要再比較。比較時需先分別計算實時圖描述子discriptorsensed和基準圖描述子discriptorref的歐氏距離,即

計算最近鄰匹配點distf和次近鄰匹配點dists,若distf/distf≤1,則二者匹配。基于Hessian 矩陣跡的特征點匹配結果如圖4 所示。

圖4 實時圖中心位置及其在基準圖上的定位結果
f.基于RANSAC 的局部參數估計
RANSAC 算法具體流程如下:a.隨機選擇N 個樣本;b.根據抽取樣本估計模型數;c.用估計模型計算各匹配點對間的距離,將距離小于閾值的匹配點作為內點;d.上述過程重復k 次,選擇一個包含內點最多的點集,重新計算模型參數。各參數計算關系為:

其中外點概率為ε;采樣點對數為q;k 次采樣至少有1 次全部是內點的概率為P。
用RANSAC 算法求解給定兩幅圖像間的變換參數,剔除外點后,符合匹配要求的內點共46 對,圖3 和圖4 的實驗結果顯示了SURF 出格點提出后的內點配對結果、實時圖基于RANSAC 估計參數的變換結果以及實時圖中心在基準圖上的定位結果。
3 實驗結果及討論
為驗證S2WB-RSM 算法在無人機實際工作環境下有效性,選取了SIFT 特征與使用的SVD-SURF特征做實驗對比,分別就圖像配準的精確性、魯棒性和實時性進行驗證。由可見光圖像數據驗證S2WBRSM 算法的精確性,由SAR 圖像數據驗證S2WBRSM 算法的魯棒性,最后,通過并行計算實驗來驗證S2WB-RSM 算法的實時性。
實驗數據:無人機的實時圖來自某次飛行試驗記錄(uvs110722-003.AVI,jingxiangpipei-16.mat)。uvs110722-003.AVI 視頻時長701s,圖像分辨率為640 ×480,幀率為30fps。對于光電平臺記錄數據共53851 條記錄(包括無人機的經度、緯度、高度、速度、俯仰角、偏航角、滾轉角等字段)。數據顯示起始幀大地坐標為(33.65309110°,109.1199911°)。實驗截取1:30~2:38 之間視頻數據,對應平臺記錄數據即6914~12138 條,共5224 條。基準圖來自預先制備的衛星正射影像圖,分辨率為5m/pixel。實驗從中連續抽取800 幀圖像序列作為實時圖。實驗環境:PC 機,奔騰2.0GCPU,1G 內存,Windows XP操作系統,VC++開發平臺。無人機SAR 圖像的基準圖和實時圖均來自美國桑迪亞國家重點實驗室公布的網站數據。
實時圖尺寸為320 ×240 像素,為序列圖像。基準圖大小為640 ×480 像素,為分塊圖像,采用圖號調用方式。對源圖像統一采用Daubechies 小波基進行圖像壓縮,以提高景象匹配的實時性[19]。
a.可見光實時圖序列適配區連續景象匹配
基于可見光實時圖序列的連續景象匹配實驗結果數據如表3 所示,實驗結果曲線如圖5 與圖6所示。
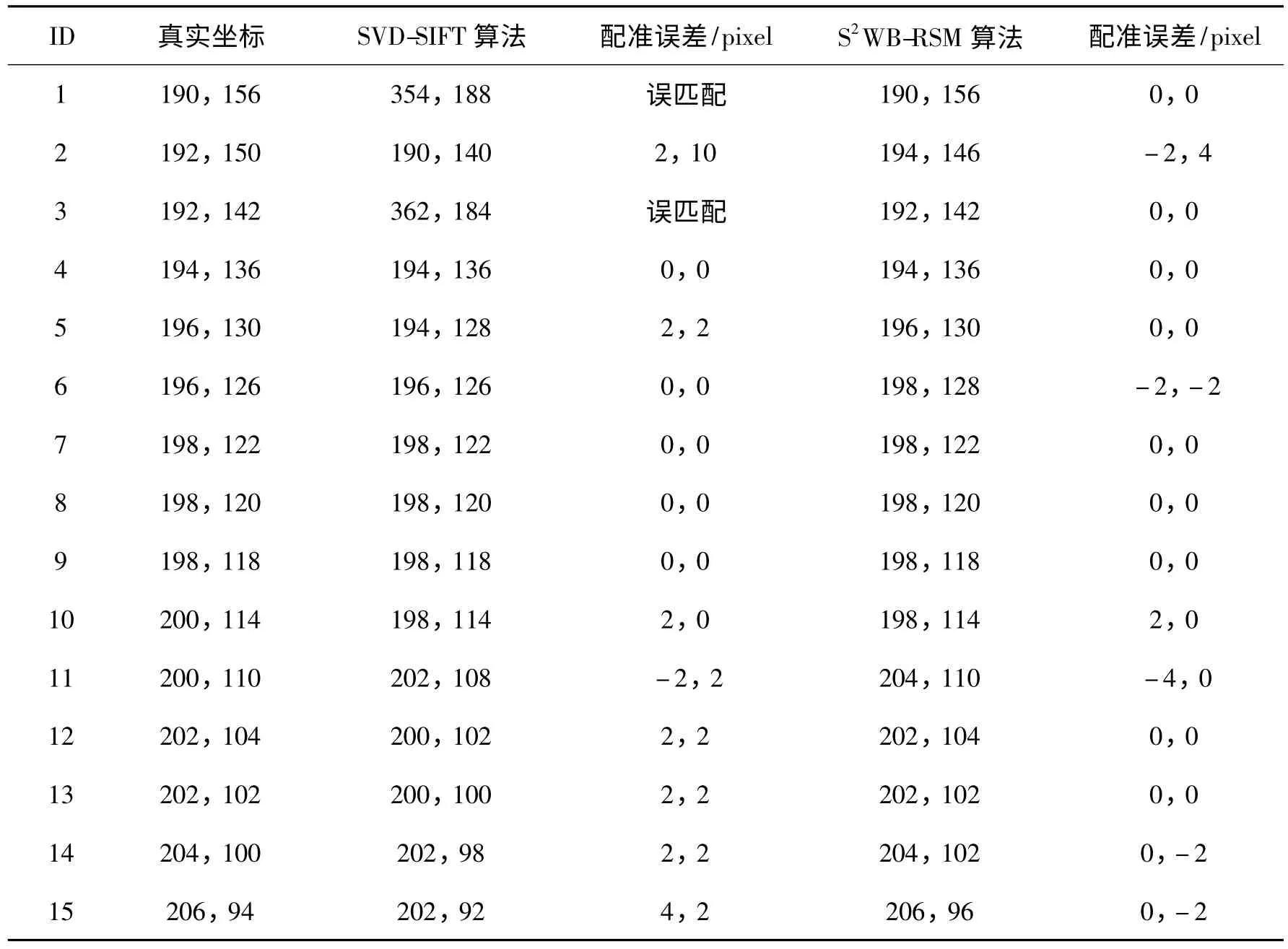
表3 基于可見光實時圖序列的連續景象匹配對比實驗數據
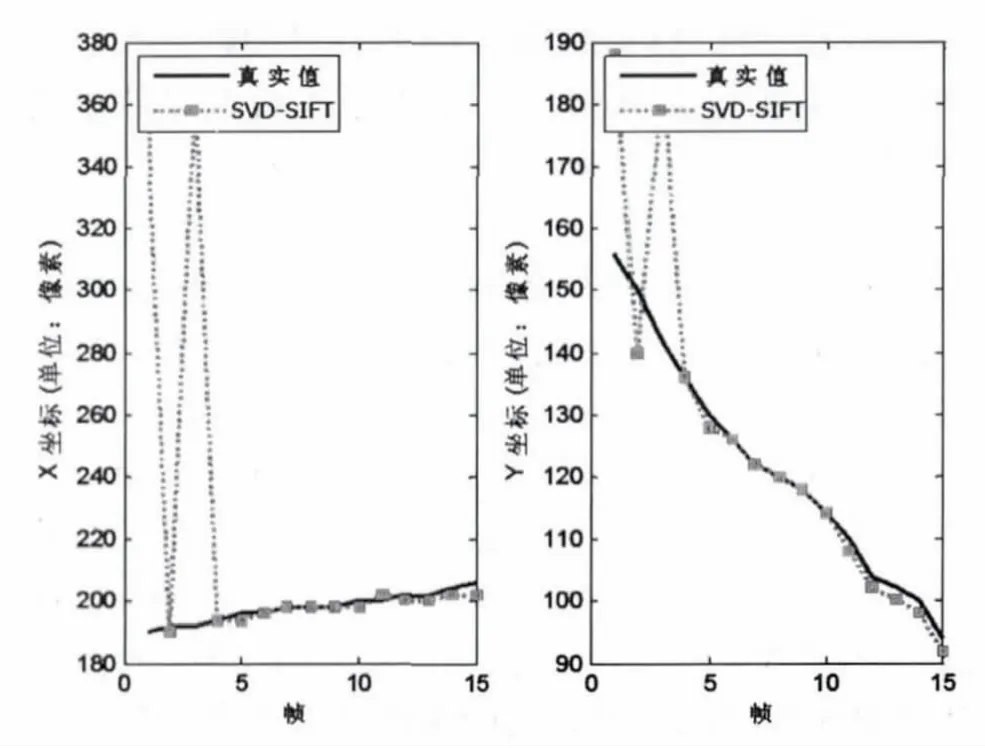
圖5 基于SVD-SIFT 特征的可見光實時圖序列配準結果
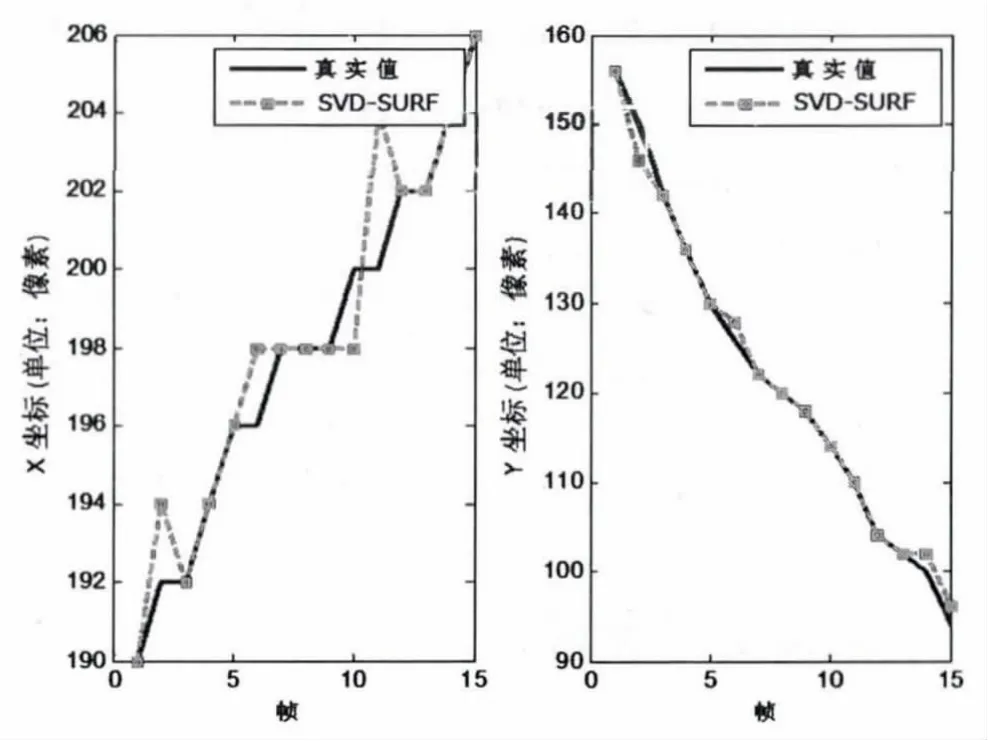
圖6 基于SVD-SURF 特征的可見光實時圖序列配準結果
無人機平臺景象匹配在實際工作中通常是以實時圖序列為配準對象,其配準精度直接反應了匹配算法能否滿足實際要求。由于可見光實時圖與基準圖差異較大,從表3 可以看出基于SVD-SIFT 特征的匹配算法配準精度較低,共有73.3%的配準點滿足無人機導航任務要求(配準誤差≤2 像素);基于SVD-SURF 特征的S2WB-RSM 算法則有86.6%的配準點滿足無人機任務需求的實際要求(配準誤差≤2 像素),在匹配精確性方面略顯優勢。
b.SAR 實時圖序列適配區連續景象匹配
本實驗將SAR 圖像序列用于連續景象匹配,其實驗結果數據如表4 所示,實驗結果曲線如圖7 與圖8 所示。雖然SAR 成像受氣象條件的影響較小,實時圖與基準圖比較相似,但是,由于SAR 圖像信噪比較低,加之分辨率較低(實驗數據分辨率為0.5米/像素),特征提取比較困難,從而導致配準誤差比可見光的大一些。表4 統計顯示,SAR 圖像序列的基于SVD-SIFT 特征的算法與基于SVD-SURF 的S2WB-RSM 算法配準最大誤差分別為6 個像素和4個像素,實驗結果表明,對于低信噪比圖像,S2WBRSM 算法的魯棒性較好。
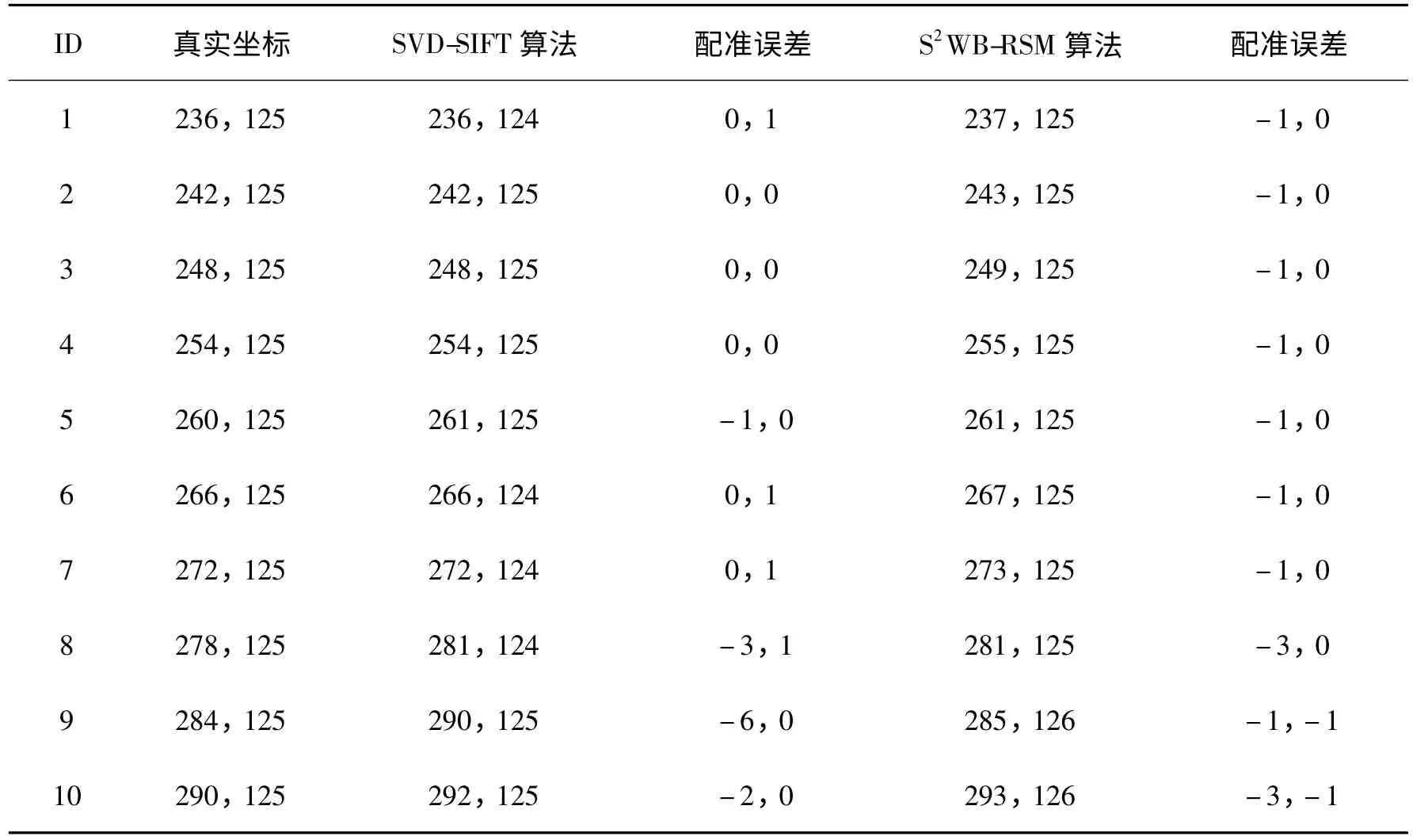
表4 基于SAR 實時圖序列的連續景象匹配對比實驗數據
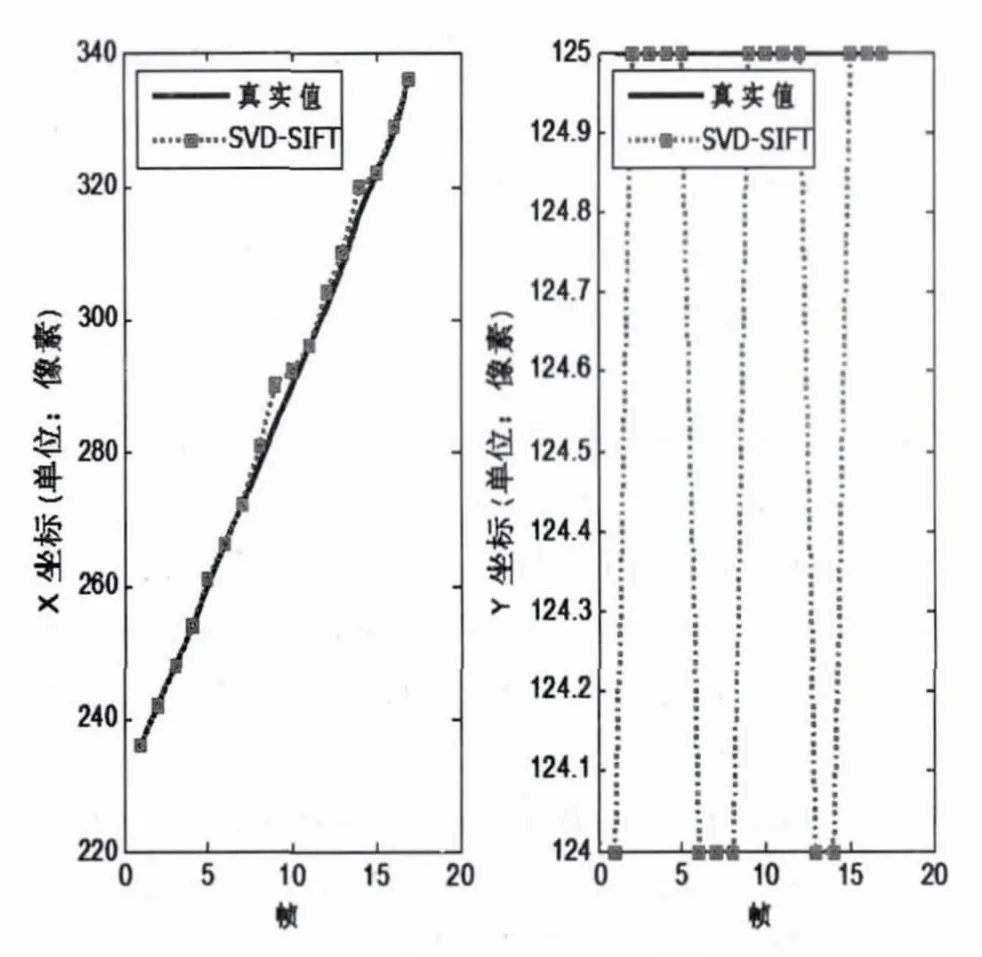
圖7 基于SVD-SIFT 特征的SAR 實時圖序列配準結果
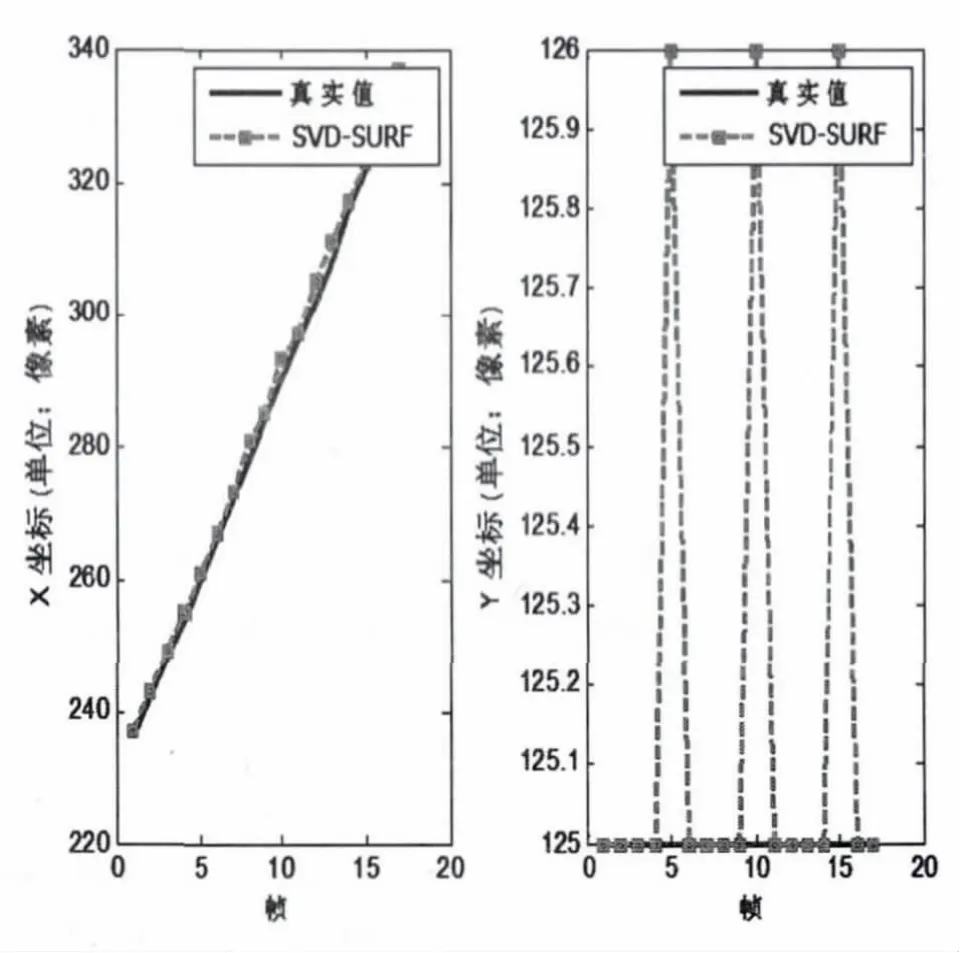
圖8 基于SVD-SURF 特征的SAR 實時圖序列配準結果
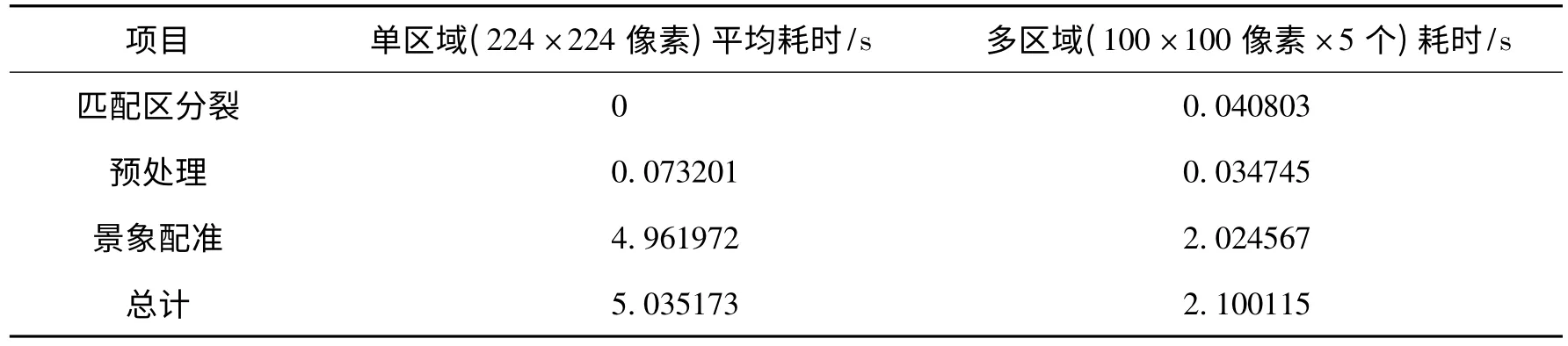
表5 SVD-SIFT 算法一次小波分解耗時統計
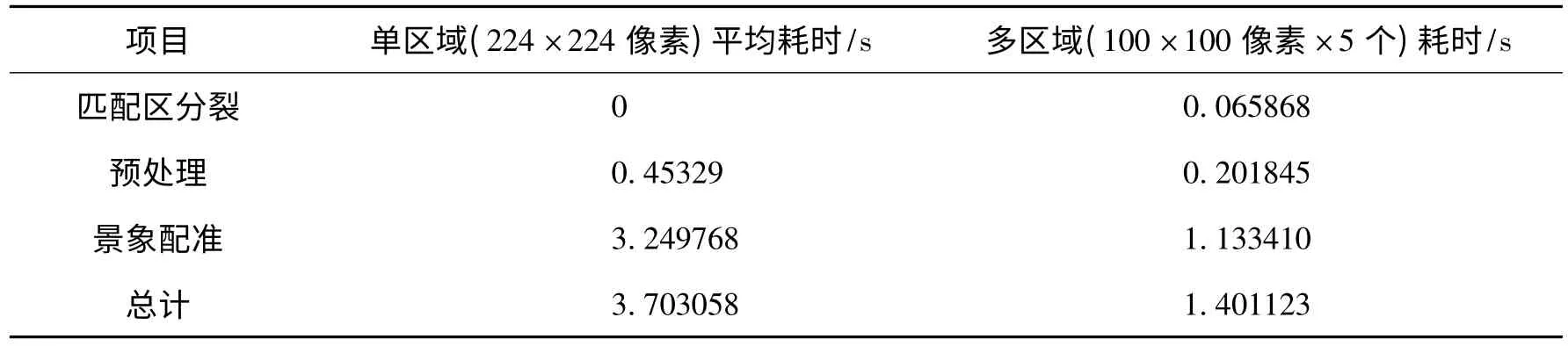
表6 S2WB-RSM 算法一次小波分解耗時統計
采用小波圖像分解時,兩種快速景象匹配算法耗時如表5 與表6 所示,實驗統計數據表明SVDSURF 算法比SVD-SIFT 算法在實時性能方面分別提高26.5% 和33.3%。因此,在實時性方面,S2WB-RSM 算法可并行計算且實時性明顯高于SVD-SIFT 算法。
綜上所述,與SVD-SIFT 算法相比,S2WB-RSM算法計算量較小,加之SVD 特征向量穩定性優勢,在低信噪比圖像配準方面誤差更小。而且,在多區域景象匹配并行計算方面,S2WB-RSM 算法比SVDSIFT 算法更具有實時性。因此,S2WB-RSM 算法性能更符合無人機系統對景象匹配導航算法的實時性、精確性和魯棒性要求。
4 結束語
面向無人機視覺導航,基于圖像奇異值特征的良好區分性、穩定性和獨立性,提出了適合無人機平臺的S2WB-RSM 算法,通過選取SIFT 特征與SVDSURF 特征做實驗對比,分別就圖像配準的精確性、魯棒性和實時性進行測試,充分顯示了奇異值特征的穩定性優勢以及SURF 特征的快速魯棒優勢,同時,驗證了S2WB-RSM 算法能夠適應航空序列圖像的一定的旋轉、尺度變換及噪聲干擾,具有較強的實時性、精確性和魯棒性,該算法為下一階段無人機載嵌入式視覺導航系統的研制奠定了重要基礎。
[1]M.Brown,D.G.Lowe.Automatic panoramic image stitching using invariant features [J].International Journal of Computer Vision,2007,74(1) :59-73.
[2]K.Mikolajczyk,C.Schmid.A performance evaluation of local descriptors [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(10) :1615-1630.
[3]D.G.Lowe.Distinctive image features from scale-invariant keypoints [J].International Journal of Computer Vision.2004,60(2) :91-110.
[4]K.Mikolajczyk,T.Tuytelaars,C.Schmid,et.al.A comparison of affine region detectors[J].International Journal of Computer Vision,2005,65(1) :43-72.
[5]V.Chandrasekhar,M.Makar,G.Takacs,et.al.Survey of SIFT compression schemes[C].Proceedings of International Conference on Pattern Recognition (ICPR),Istanbul,Turkey,August 2010.
[6]Brown M,Lowe D G.Automatic panoramic image stitching using invariant features [J].International Journal of Computer Vision,2007,74(1) :59-73.
[7]Bay H,Ess A,Tuytelaars T,et al.Speededup robust features (SURF) [J].Computer Vision and Image Understanding,2008,7(3) :346-359.
[8]Oconaire C,Blighe M,Oconno N.Sense Cam image localisation using hierarchical SURF trees[J].Springer Verlag Berlin Heidelberg,2009,9(1) :15-26.
[9]Gossow D,Pellenz J,Paulus D.Danger sign detection using color histograms and SURF matching [C].IEEE International Workshop on Safety,Security and Rescue Robotics.Tohoku,Japanese:IEEE,2008,3 (1) :13-18.
[10]Zhang Zhanyu,Huang Yalou,Li Chao,et al.Monocular vision simultaneous localization and mapping using SURF[C].World Congress on Intelligent Control and Automation.Chongqing,China,2008,5 (11) :1651-1656.
[11]Hong Z.Algebraic feature extraction of image for recognition [J].Pattern Recognition,1991,24(3) :211-219.
[12]周德龍.人臉識別技術研究[D].西安:西北工業大學,2000.
[13]甘俊英,張有為.一種基于奇異值特征的神經網絡人臉識別新途徑[J].電子學報,2004,32(1) :170-173.
[14]KlemaV C,Laub A J.Singular value decomposition:its computation and some applications[J].IEEE Trans-actions on Automatic Control,1980,25(2) :164-176.
[15]Gan junying,Zhang Youwei.A New Approach for Face Recognition Based on Singular Value Features and Neural Networks[J].Acta Electronica Sinica,2004,32(1) :170-173.
[16]顧曉波.基于支持向量機的彩色圖像的人眼定位及人臉檢測[D].上海:上海師范大學,2007.
[17]李曉東,費樹岷,張濤.基于奇異值特征和支持向量機的人臉識別[J].東南大學學報(自然科學版),2008,38(6) :981-985.
[18]徐秀云.基于特征點的景象匹配技術研究[D].南京:南京理工大學,2009.
[19]李耀軍,潘泉等.基于空間關系幾何約束的無人機景象匹配導航[J].計算機應用研究,2010,27(10) :3822-3825,3846.
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55