基于循環(huán)相關(guān)的GPS 信號捕獲
2013-10-21 00:58:04羅丁利
火控雷達技術(shù) 2013年4期
關(guān)鍵詞:信號
任 遠 羅丁利
(西安電子工程研究所 西安 710100)
0 引言
GPS 是美國在1973 年開始研制的衛(wèi)星導(dǎo)航與定位系統(tǒng),具有高精度、全天候、全球覆蓋、方便靈活等特點。GPS 信號在傳輸過程中采用直接序列擴頻調(diào)制方式,接收機在時間信息提取和導(dǎo)航電文解調(diào)之前,需要實現(xiàn)載波和C/A 碼的二維同步[1]。載波同步和C/A 碼同步一般分為捕獲(粗同步)和跟蹤(精確同步)兩個階段,且GPS 衛(wèi)星信號的跟蹤需要以信號捕獲為前提。在信號跟蹤之前,接收機內(nèi)部復(fù)制的載波和C/A 碼信號必須與接收信號吻合到一定程度,估算出接收信號的載波多普勒頻移和碼相位,然后根據(jù)這些信號參數(shù)估計值初始化跟蹤環(huán)路,以幫助接收通道展開對信號的跟蹤。
傳統(tǒng)GPS 信號捕獲方法[1]對接收的衛(wèi)星信號在多普勒頻移域和碼相位域進行二維線性掃描式搜索,其優(yōu)點在于只需要少數(shù)幾個數(shù)字相關(guān)器,并且這些相關(guān)器隨后也可以用于信號跟蹤過程,簡化了硬件設(shè)計,其缺點是運算量大,捕獲時間較長。基于載波(或多普勒頻移)域的FFT 并行捕獲算法[2]將二維搜索變?yōu)榇a相位域上的一維搜索,該算法對多普勒頻移的估算精度取決于離散傅里葉變換的數(shù)據(jù)長度和數(shù)據(jù)的采樣頻率,使用短時間數(shù)據(jù)進行運算時多。普勒頻移分辨率不高,導(dǎo)致信號捕獲靈敏度性能變差,而使用長時間數(shù)據(jù)進行運算時在提高多普勒頻移分辨率的同時也使FFT 點數(shù)增多,運算量增大。基于碼相位域的FFT 并行捕獲算法[3]將信號搜索變?yōu)槎嗥绽疹l移域上的一維搜索,大幅度提高了捕獲速度。文獻[4]在基于碼相位域的FFT 并行捕獲算法基礎(chǔ)上,用傅里葉系數(shù)的循環(huán)移位取代頻率補償和FFT 運算,繼而將運算量較之原始算法減少一半。基于FFT 的并行捕獲算法要求信號采樣率為2 的冪次,一般的GPS 信號采樣率較難滿足,這就增加了計算復(fù)雜度而影響處理速度。文獻[5]中介紹了一種基于平均采樣技術(shù)的捕獲算法,將FFT 數(shù)據(jù)點數(shù)重采樣到2 的冪次點,減少了運算時間,也降低了硬件實現(xiàn)的難度和成本。
本文介紹了一種基于循環(huán)相關(guān)的捕獲算法,與傳統(tǒng)的線性搜索捕獲算法相比,減少了運算量,同時保留硬件設(shè)計簡單、數(shù)字相關(guān)器可用于后續(xù)信號跟蹤過程等優(yōu)點。
1 傳統(tǒng)線性搜索捕獲算法[6]
假設(shè)接收機接收到的GPS 信號經(jīng)過射頻前端處理之后可表示為:

式中PS是信號功率;C(n)是C/A 碼,其值為± 1;D(n)是比特率50bps 的導(dǎo)航電文;ωIF是中頻載波頻率,其值由射頻前端和多普勒頻移決定;φ(n)是初始載波相位;e(n)為零均值高斯白噪聲。
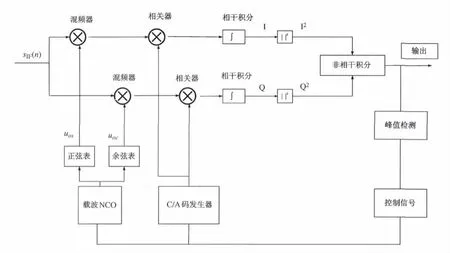
圖1 線性搜索捕獲原理
圖1 給出了GPS 接收機線性搜索捕獲算法的基本流程。本文以接收一顆衛(wèi)星信號為例,在捕獲過程中,數(shù)字中頻信號sIF首先分別與同相支路的本地正弦和正交支路的本地余弦復(fù)制載波進行混頻,然后混頻結(jié)果與復(fù)制C/A 碼進行相關(guān),接著相關(guān)結(jié)果i 與q 經(jīng)過時間為Tcoh的相干積分后生成數(shù)據(jù)對I和Q,

其中,a 為信號幅值;τ 為C/A 碼相位與搜索碼相位之間的差異;fe為接收載波頻率與搜索頻率之間的差異;Φe為兩載波之間的相位差異;nI與nQ分別代表I 支路與Q 支路上均值為零且互不相關(guān)的高斯噪聲。
假設(shè)非相干積分數(shù)目為Nnc,最后經(jīng)非相干積分后得到非相干積分幅值V。

信號捕獲的非相干檢測法通過檢測非相干積分幅值V 的大小來判斷接收信號是否已經(jīng)被搜索到:若非相干積分幅值V 小于捕獲預(yù)先設(shè)置好的捕獲門限Vt,則信號尚未被搜索到,于是接收機按照既定的搜索步長調(diào)節(jié)載波數(shù)控振蕩器(NCO)和C/A 碼發(fā)生器輸出,繼續(xù)在下一個搜索單元進行搜索與檢測,直到確認信號成功捕獲。
2 基于循環(huán)相關(guān)的捕獲算法
2.1 算法原理
C/A 碼是周期為1023 個碼片的Gold 碼,碼率為fC/A=1.023Mcps,即在每個C/A 周期(1ms)有1023 個碼片,且具有良好的自相關(guān)和互相關(guān)特性[7]。一般情況下GPS 軟件接收機將接收信號從射頻前端輸出后進行中頻采樣,采樣頻率為fS,則一個C/A 碼片周期(1ms)對應(yīng)的采樣點數(shù)N=fS/1000,相應(yīng)的本地C/A 碼也被重采樣為N點。圖2 示出基于循環(huán)相關(guān)的捕獲算法流程,針對C/A 碼相關(guān)過程進行改進,具體實現(xiàn)方法分為兩步。
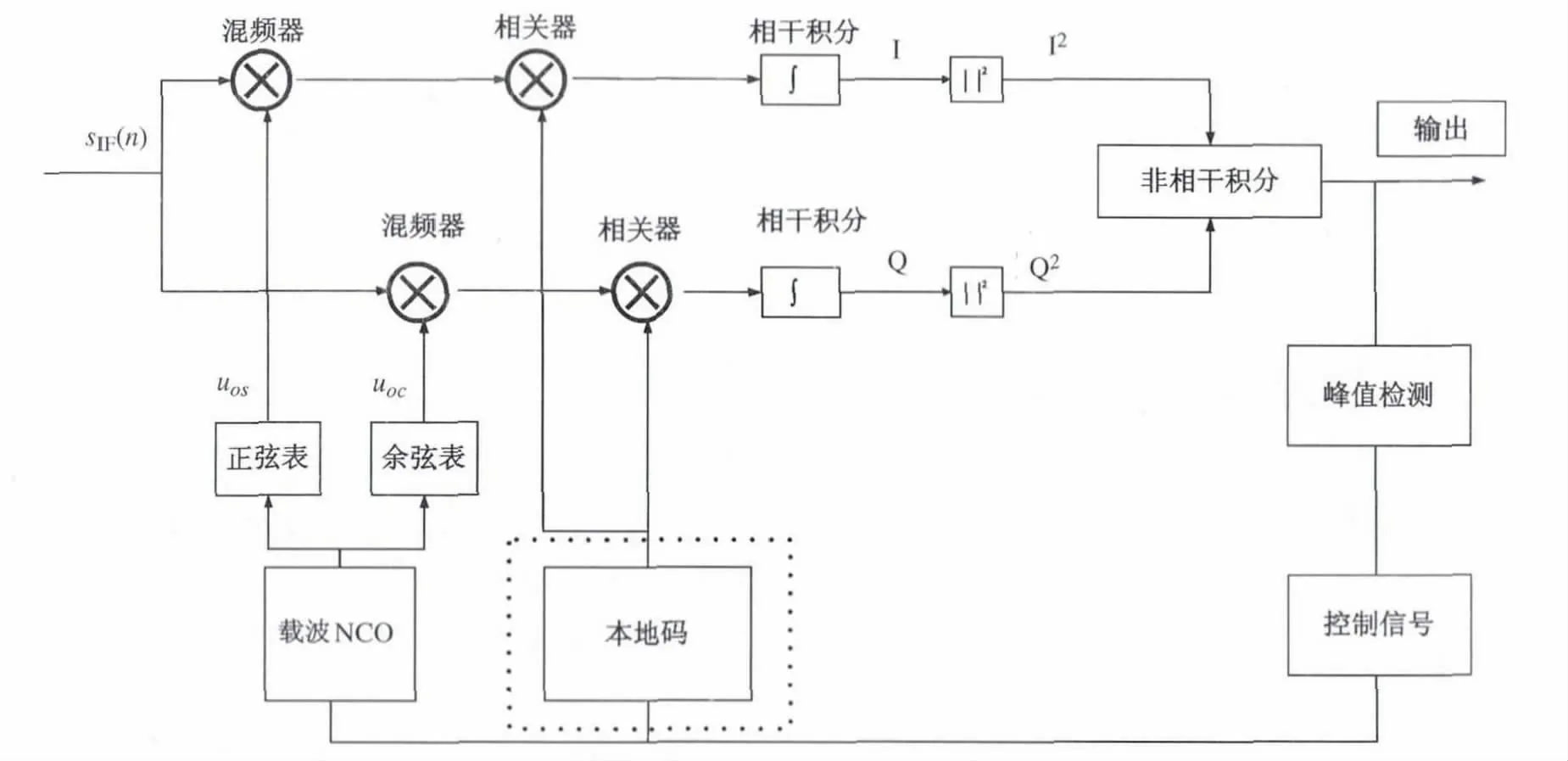
圖2 基于循環(huán)相關(guān)的捕獲算法流程圖
a.對于采樣后周期為N 的C/A 碼序列C(n),假設(shè)接收信號序列為C(n +m),m 為接收信號碼相位。本地C/A 碼發(fā)生器產(chǎn)生的C/A 碼為序列C(n),按照圖3 所示循環(huán)移位后疊加構(gòu)成新本地碼序列h(n):

其中L 為每次循環(huán)移位點數(shù),其取值將在3.2節(jié)中說明。為了方便公式推導(dǎo),這里假設(shè)N 是L 的整數(shù)倍,實際情況下當N 不能被L 整除時,循環(huán)移位次數(shù)可以取N/L 的向上取整值。
將h(n)設(shè)為圖2 虛線框中的本地碼,接收信號c(n +m)與h(n)連續(xù)進行L 點循環(huán)相關(guān)運算,取模后結(jié)果為| R1(τ)|:
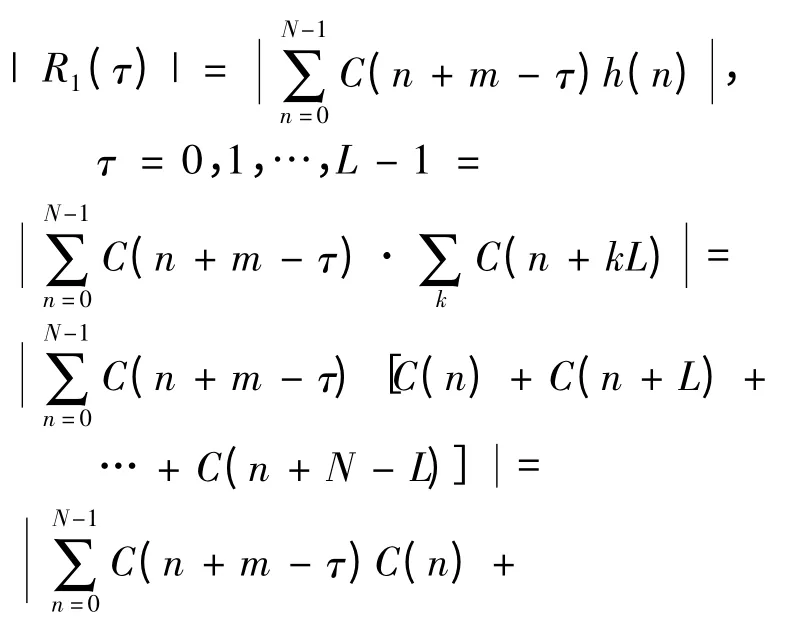
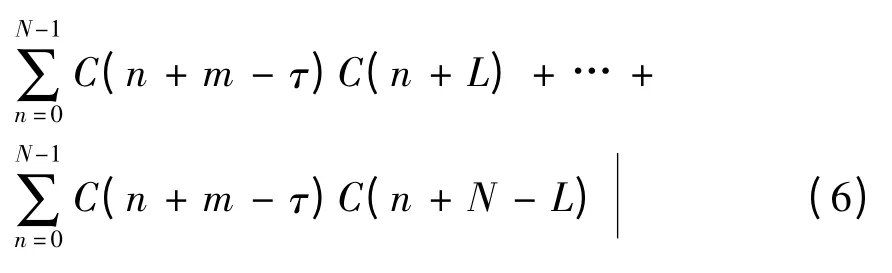
根據(jù)C/A 碼良好的自相關(guān)性特點,當m-τ=KL 時,式(6)中有且只有一項會達到最大相關(guān)值,其余項都很小,找出|R1(τ)|最大值對應(yīng)的τ。此時可以確認某GPS 衛(wèi)星信號的存在,只是得到的碼相位同步點存在若干個L 的模糊,即此時估算出的碼相位為相對碼相位,下一步確定接收信號的絕對碼相位。
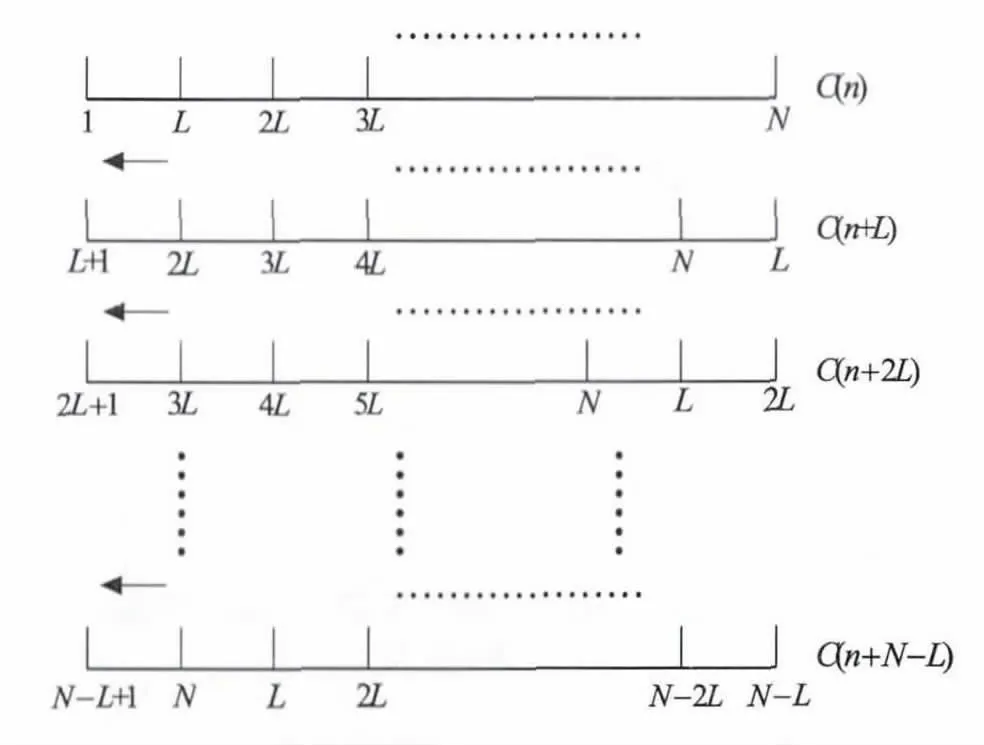
圖3 本地C/A 碼循環(huán)移位示意圖
b.將原始C/A 碼序列C(n)向左循環(huán)移位τ-1 個碼片后設(shè)為圖2 虛線框中的本地碼,本地碼與接收信號C(n+m)進行相關(guān)運算,對相關(guān)值取模后記錄其大小,然后本地碼向左循環(huán)移位L 個碼片再與接收信號C(n+m)進行相關(guān)取模運算,如此進行N/L-1 次移位和相關(guān)取模后找出N/L 個相關(guān)模值中最大值所對應(yīng)的循環(huán)移位次數(shù)K。最后計算出接收信號C/A 絕對碼相位:

2.2 計算量分析
基于循環(huán)相關(guān)的捕獲算法與傳統(tǒng)線性搜索捕獲算法相比,差別主要體現(xiàn)在相關(guān)運算的計算量上,而在多普勒頻移分辨率方面則完全一樣。

表1 運算量比較
從表1 中看出基于循環(huán)相關(guān)的捕獲算法運算量與一個C/A 碼片周期(1ms)對應(yīng)的采樣點數(shù)N、循環(huán)移位點數(shù)L 有關(guān)。當中頻采樣頻率fS較大時,即一個C/A 碼片周期(1ms)對應(yīng)的采樣點數(shù)N 較大情況下,基于循環(huán)相關(guān)的捕獲算法運算量減少更為可觀,節(jié)省了大量的捕獲時間。采樣頻率fS一定時,即一個C/A 碼片周期(1ms)對應(yīng)的采樣點數(shù)N 固定情況下,如果不考慮輸出信噪比因素,當L=N1/2時運算量最小。然而基于循環(huán)相關(guān)的捕獲算法構(gòu)成新本地碼之后進行相對碼相位搜索時,使噪聲分量相對于信號分量上升了N/L 倍,輸出信噪比SNR 下降,較少的循環(huán)移位點數(shù)使SNR 惡化更為明顯。
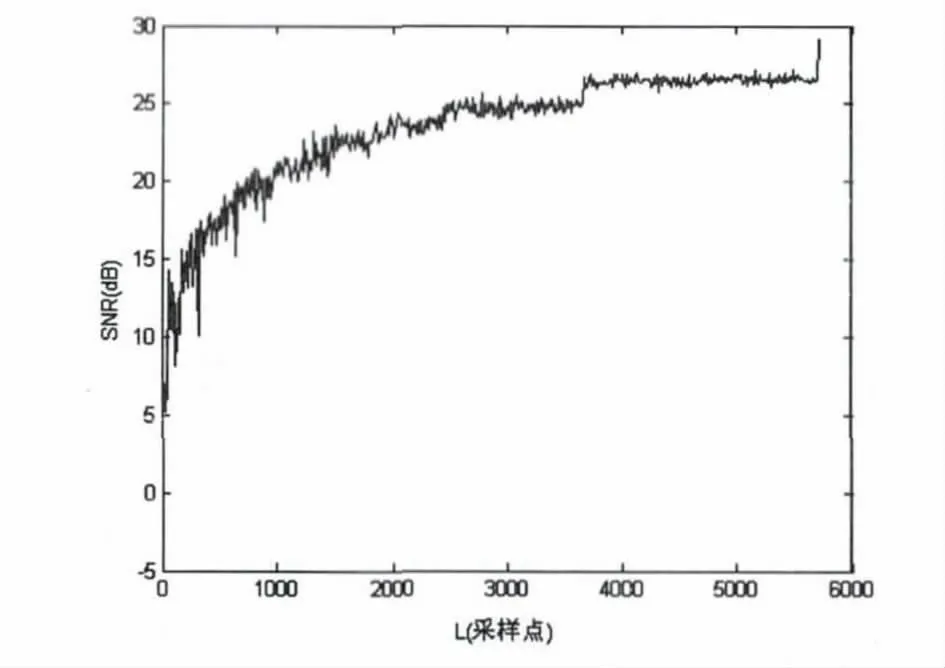
圖4 L 與輸出SNR 的關(guān)系
圖4 表示輸出信噪比SNR 與循環(huán)移位點數(shù)L的關(guān)系,SNR 曲線包絡(luò)隨著L 的增大而增大。在實際工程應(yīng)用中,根據(jù)對輸出信噪比和捕獲速度的要求來確定循環(huán)移位點數(shù)L,從而確定新本地碼的組成。
2.3 仿真與結(jié)果分析
實驗數(shù)據(jù)為實際采集的GPS 信號。采用Zarlink 公司產(chǎn)品GP2015 芯片的射頻前端,輸出中頻為1.405396MHz,采樣率fS為5.714MHz,一個C/A 碼片周期(1ms)對應(yīng)的采樣點數(shù)N=5714,本地C/A 碼也被重采樣為5714 點。本文使用Matlab 對采集到的數(shù)據(jù)進行仿真,捕獲第7 號衛(wèi)星信號。為了提高輸出信噪比,保證可靠的檢測概率,傳統(tǒng)線性搜索捕獲算法與基于循環(huán)相關(guān)捕獲算法都采用了9ms 長度的相干積分。
圖5 是運用線性搜索捕獲算法對7 號衛(wèi)星信號的捕獲結(jié)果。圖中峰值超過預(yù)先設(shè)定的門限,表明捕獲成功,多普勒頻移為-1400Hz,碼相位為第3573 個采樣點,運算量為2N2=65299592 次實數(shù)乘加運算。
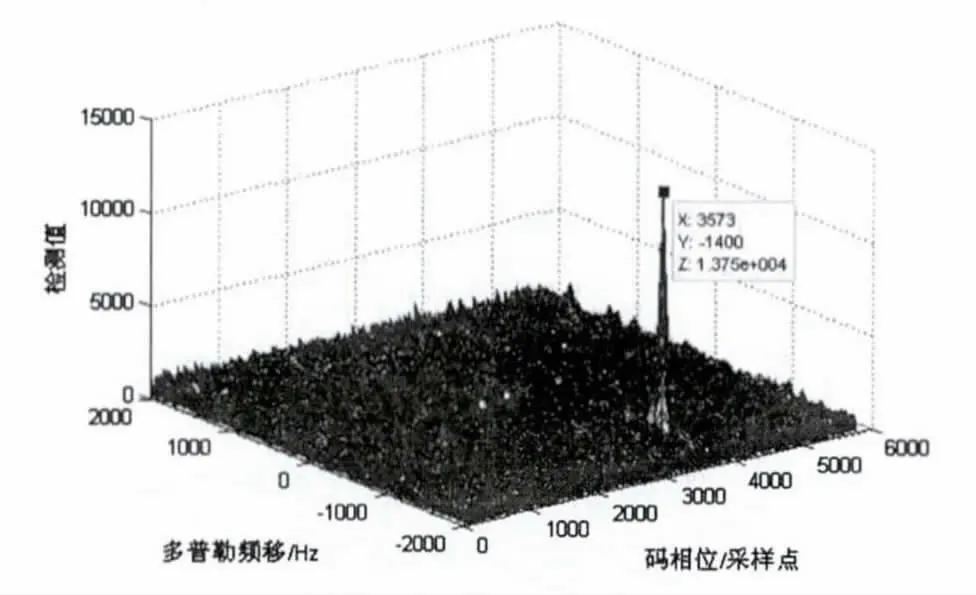
圖5 線性搜索捕獲結(jié)果
基于循環(huán)相關(guān)的捕獲算法仿真中,本地C/A 碼重采樣后按3.1 節(jié)方法構(gòu)成新本地碼時取循環(huán)移位點數(shù)為L=1143,對應(yīng)的循環(huán)移位次數(shù)為4。此時L的取值在輸出信噪比和算法計算量之間做了折中,既保證了較高的輸出信噪比,又大大減少了運算量。
圖6 是基于循環(huán)相關(guān)的捕獲算法對7 號衛(wèi)星信號的捕獲結(jié)果。圖中尖峰峰值超過預(yù)設(shè)定的門限,表明捕獲成功,多普勒頻移為-1400Hz,C/A 碼的相對碼相位為第144 個采樣點。
圖7 表示基于循環(huán)相關(guān)的捕獲算法第二步中循環(huán)移位次數(shù)和相關(guān)模值的關(guān)系。當循環(huán)移位次數(shù)為3 時,本地C/A 碼與接收信號相關(guān)值取模后遠遠大于其他相關(guān)模值。由3.1 節(jié)式(7)可估計絕對碼相位為第144 +3 ×1143=3573 個采樣點。
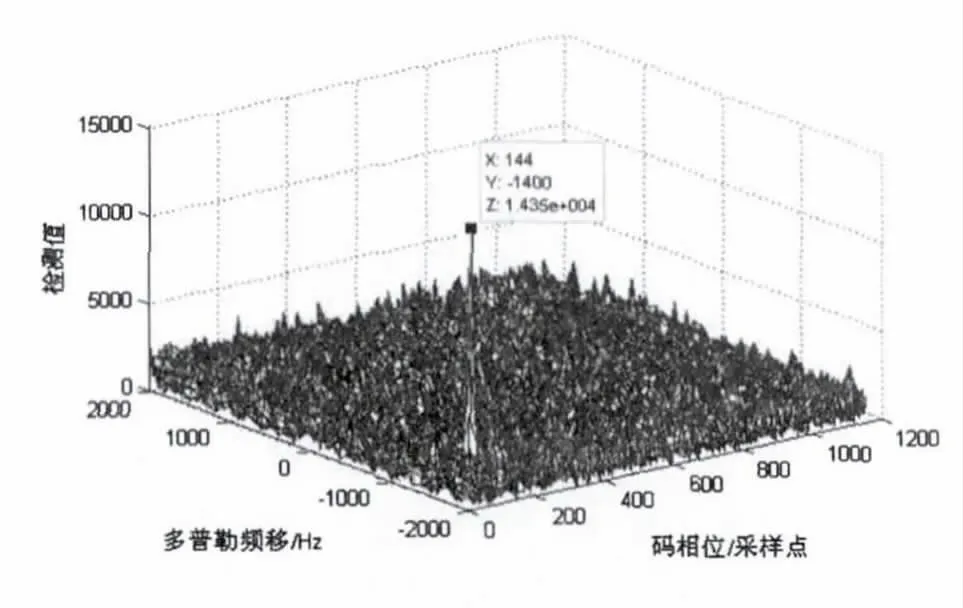
圖6 基于循環(huán)相關(guān)的捕獲結(jié)果
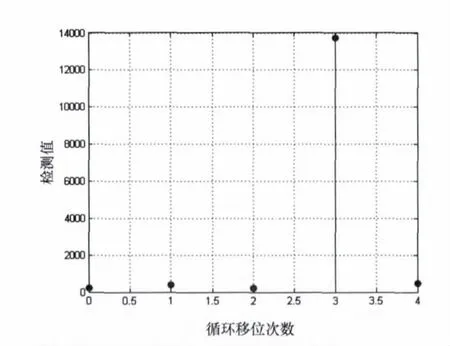
圖7 循環(huán)移位次數(shù)和相關(guān)模值關(guān)系圖
上述仿真結(jié)果與線性搜索捕獲算法仿真結(jié)果一致,驗證了基于循環(huán)相關(guān)捕獲算法的正確性,運算量為2(N/L+L)N≈13119344 實數(shù)乘加運算。基于循環(huán)相關(guān)的捕獲算法實數(shù)乘加運算大約只有線性搜索捕獲算法的五分之一,運算量顯著減小。
3 結(jié)論
本文討論了GPS 信號線性搜索捕獲算法實現(xiàn),介紹了一種基于循環(huán)相關(guān)的捕獲算法,結(jié)合串行和并行捕獲方法,使運算量大大減少;硬件實現(xiàn)簡單,只需要若干個數(shù)字相關(guān)器,且這些相關(guān)器隨后可以用于信號跟蹤過程。通過對兩種算法仿真結(jié)果分析,驗證了新算法的正確性。在構(gòu)建本地新碼時應(yīng)該根據(jù)輸入信噪比,捕獲時間以及正確捕獲概率的要求,來確定循環(huán)移位點數(shù)L 的值。
[1]Kaplan E D.Understanding GPS principles and applications [M].Norwood,MA:Artech House,1996.
[2]Frai D M.A fast acquisition CDMA receiver for burst transmission system[C].The 11th IEEE International Conference on ICECS,Sheraton Moriah Tel-Aviv,2004,342-345.
[3]Tang B,Liu S S,Tang W T.Design a L1 software receiver based on IF GPS signal simulator[C].The 8th International Conference on Signal Processing,Beijing,2006.
[4]陳希,張銳,帥濤.基于FFT 的GPS 快速并行捕獲 算 法[J].宇 航 學(xué) 報,2011,32 (1) :162-166.
[5]曹單,汪澎,周建紅.GPS 快速捕獲算法與仿真[J].火控雷達技術(shù),2012,41(1) :24-27.
[6]謝鋼.GPS 原理與接收機設(shè)計[M].北京:電子工業(yè)出版社,2009.
[7]樊昌信等編.通信原理(第5 版) [M].北京國防工業(yè)出版社,2009.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06